Topology-Optimized Pneumatic Soft Actuator: Design and Experimental Validation
Pith reviewed 2026-05-20 04:38 UTC · model grok-4.3
The pith
A 3D topology optimization method designs pneumatic soft actuators that maximize bending for a given pressure while respecting strain limits.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
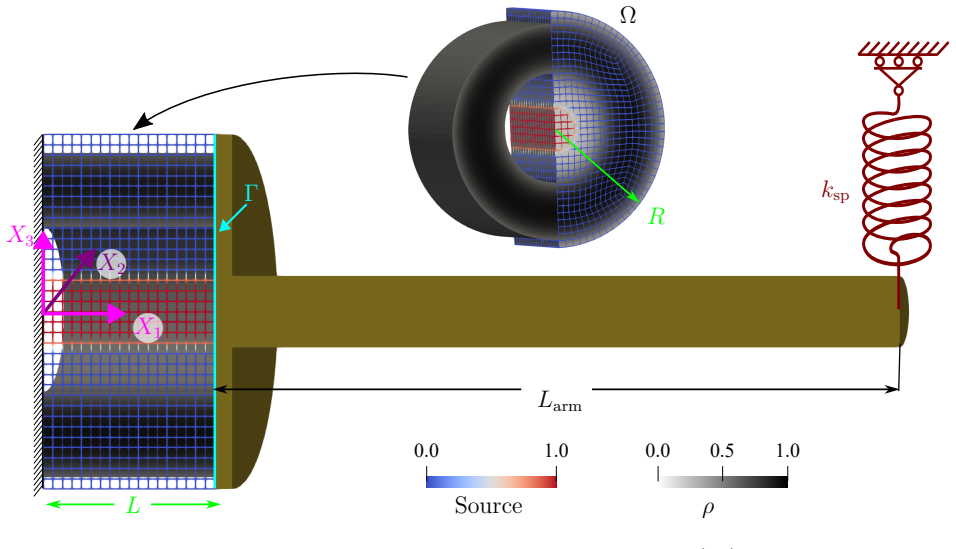
Extending the density- and porohyperelasticity-based topology optimization framework from 2D to 3D produces two manufacturable actuator designs that maximize bending response for a prescribed actuation pressure under two different allowable strain limits; the designs are validated both numerically and through stereolithography fabrication and experimental testing.
What carries the argument
The 3D extension of the density- and porohyperelasticity-based topology optimization framework that accounts for large deformations throughout the optimization process.
If this is right
- The same optimization procedure can be rerun for different pressure levels or strain limits to produce families of actuators.
- The framework directly supplies printable 3D geometries that require no post-processing interpretation.
- Numerical and experimental agreement demonstrates that the large-deformation effects are captured during design rather than corrected afterward.
Where Pith is reading between the lines
- The approach could be applied to other soft-robotics components such as grippers or crawling mechanisms by changing only the objective and boundary conditions.
- Combining the method with multi-material printing might allow further performance gains by placing stiffer and softer regions where the optimization naturally concentrates them.
- The resulting designs may serve as benchmarks for comparing different topology-optimization formulations or fabrication techniques.
Load-bearing premise
The porohyperelastic material model and large-deformation assumptions accurately represent how the stereolithography-fabricated elastomeric material behaves when pressurized.
What would settle it
Experimental measurement of tip bending angle and maximum strain in the fabricated actuators deviates substantially from the numerical predictions obtained with the optimized designs.
Figures









read the original abstract
This paper demonstrates the computational design of soft elastomeric pneumatic actuators using nonlinear topology optimization. An existing density- and porohyperelasticity-based topology optimization framework was extended from 2D to 3D and used to generate two manufacturable actuator designs, which were then studied numerically and experimentally. For both designs, the objective was to maximize the bending response for a prescribed actuation pressure under two different allowable strain limits. A key advantage of the employed topology optimization framework is that it can consistently, during the optimization, account for the very large deformations induced upon pressurization. The two optimized 3D designs were fabricated using stereolithography and experimentally tested to validate their performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends a density-based topology optimization framework that incorporates porohyperelasticity from 2D to 3D and applies it to generate two manufacturable pneumatic soft actuator designs. The objective is to maximize bending displacement under a fixed actuation pressure subject to two different allowable strain limits; the designs are then fabricated via stereolithography and their performance is assessed both numerically (using the same constitutive model) and experimentally.
Significance. If the porohyperelastic constitutive model is representative of the SLA-printed elastomer under large strains, the work demonstrates a practical route to computationally designing high-performance soft actuators that explicitly account for geometric nonlinearity during optimization. The direct numerical-experimental comparison on fabricated prototypes supplies concrete evidence that the 3D extension produces realizable, high-bending designs.
major comments (1)
- [Constitutive model and topology optimization framework] The porohyperelastic material parameters employed throughout the 3D topology optimization are not calibrated against uniaxial or biaxial test data obtained from specimens printed with the identical SLA resin batch and process parameters used for the final actuators. Because the optimizer relies on this model to evaluate both the objective (bending) and the strain-limit constraints under finite deformations, any mismatch in shear modulus, bulk modulus, or strain-stiffening behavior directly affects the optimality of the generated topologies and the reported numerical-experimental agreement.
minor comments (2)
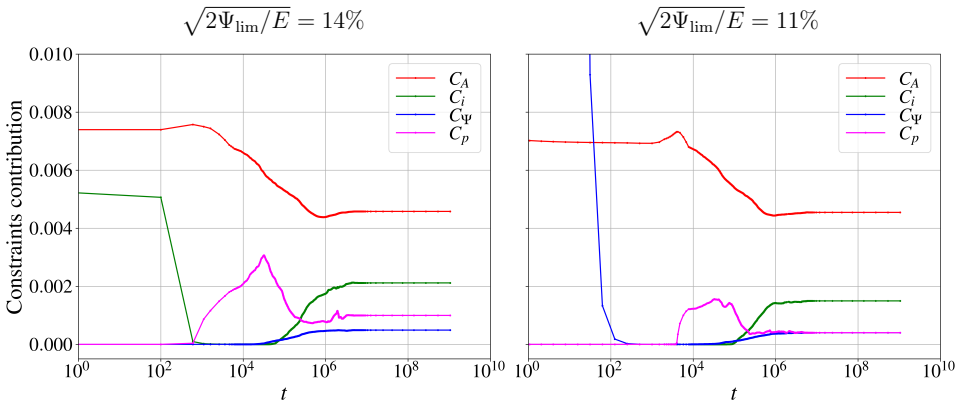
- [Problem formulation] Specify the exact numerical values of the two allowable strain limits and the rationale for their selection; this information is needed to interpret the relative performance gains of the two optimized designs.
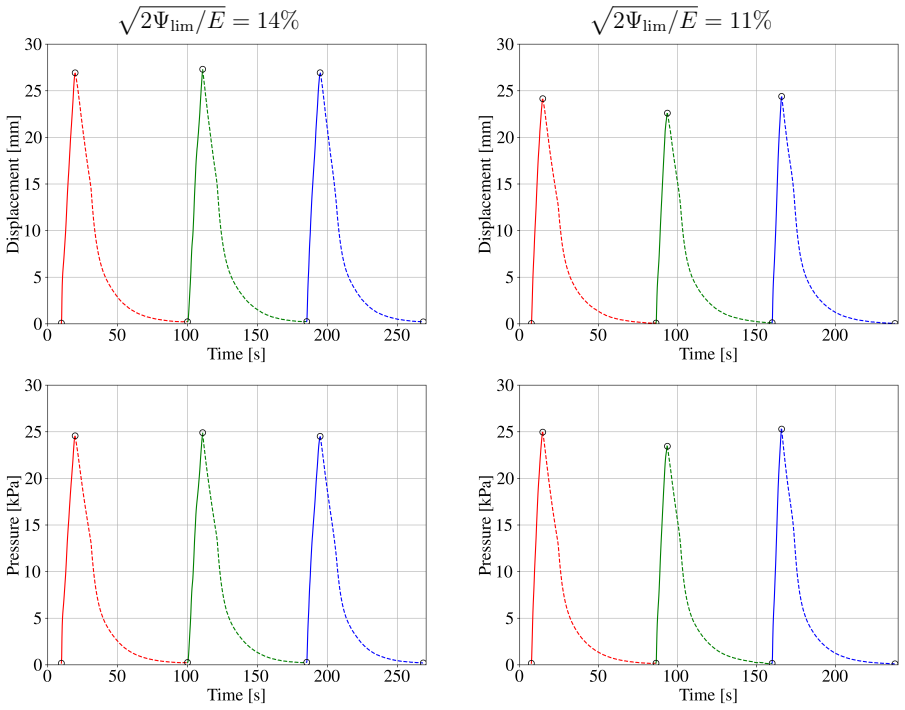
- [Experimental validation] In the experimental results, report the number of repeated tests per actuator and the observed variability (standard deviation or range) in bending angle to allow quantitative assessment of experimental repeatability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment point by point below.
read point-by-point responses
-
Referee: [Constitutive model and topology optimization framework] The porohyperelastic material parameters employed throughout the 3D topology optimization are not calibrated against uniaxial or biaxial test data obtained from specimens printed with the identical SLA resin batch and process parameters used for the final actuators. Because the optimizer relies on this model to evaluate both the objective (bending) and the strain-limit constraints under finite deformations, any mismatch in shear modulus, bulk modulus, or strain-stiffening behavior directly affects the optimality of the generated topologies and the reported numerical-experimental agreement.
Authors: We thank the referee for this observation. The porohyperelastic parameters were taken directly from the 2D framework paper on which this work builds, where they were calibrated to uniaxial tension data for SLA-printed specimens of the same resin family and similar process parameters. We acknowledge that batch-specific recalibration for the exact resin lot used here would be preferable and could further strengthen claims of optimality. To address the concern, we will revise the manuscript to (i) explicitly state the provenance of the parameters with reference to the prior calibration data, (ii) add a short sensitivity study demonstrating that the optimized topologies and predicted bending displacements remain qualitatively unchanged under modest variations in shear and bulk moduli consistent with typical SLA batch variation, and (iii) note the close numerical-experimental agreement as supporting evidence that the chosen model remains representative for the designs considered. We believe these additions will clarify the modeling choices without requiring new physical testing. revision: partial
Circularity Check
No significant circularity; optimization and experimental validation are independent
full rationale
The paper extends an existing 2D density- and porohyperelasticity-based topology optimization framework to 3D to generate actuator geometries that maximize bending under prescribed pressure and strain limits. These geometries are then fabricated via stereolithography and tested experimentally. No equation or step reduces a performance metric to a fitted parameter or self-definition by construction. The porohyperelastic constitutive law is an input to the optimizer, but the final claims rest on physical measurements outside the model, satisfying the self-contained benchmark criterion. Minor self-citation of the prior framework is present but not load-bearing for the 3D extension or validation results.
Axiom & Free-Parameter Ledger
free parameters (1)
- allowable strain limits
axioms (1)
- domain assumption The elastomeric material obeys a porohyperelastic constitutive law under large deformations
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
An existing density- and porohyperelasticity-based topology optimization framework was extended from 2D to 3D ... employing the theory of porohyperelasticity from [27] ... Neo-Hookean constitutive law
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
maximize the bending response for a prescribed actuation pressure under two different allowable strain limits
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
F. Ilievski, A. D. Mazzeo, R. F. Shepherd, X. Chen, G. M. Whitesides, Soft robotics for chemists, Angewandte Chemie International Edition 50 (8) (2011) 1890–1895
work page 2011
-
[2]
J. Shintake, V. Cacucciolo, D. Floreano, H. Shea, Soft robotic grippers, Advanced Materials 30 (29) (2018) 1707035
work page 2018
-
[3]
S. Chen, Y. Cao, M. Sarparast, H. Yuan, L. Dong, X. Tan, C. Cao, Soft crawling robots: design, actuation, and locomotion, Advanced Materials Technologies 5 (2) (2020) 1900837
work page 2020
- [4]
-
[5]
P. Polygerinos, Z. Wang, K. C. Galloway, R. J. Wood, C. J. Walsh, Soft robotic glove for combined assistance and at-home rehabilitation, Robotics and Autonomous Systems 73 (2015) 135–143
work page 2015
-
[6]
M. Runciman, A. Darzi, G. P. Mylonas, Soft robotics in minimally invasive surgery, Soft Robotics 6 (4) (2019) 423–443
work page 2019
-
[7]
X. Hu, A. Chen, Y. Luo, C. Zhang, E. Zhang, Steerable catheters for minimally invasive surgery: a review and future directions, Computer Assisted Surgery 23 (1) (2018) 21–41. 18
work page 2018
-
[8]
T. Umedachi, V. Vikas, B. Trimmer, Softworms: the design and control of non-pneumatic, 3D-printed, deformable robots, Bioinspiration & Biomimetics 11 (2) (2016) 025001
work page 2016
-
[9]
D. Li, J. Li, P. Wu, G. Zhao, Q. Qu, X. Yu, Recent advances in electrically driven soft actuators across dimensional scales from 2D to 3D, Advanced Intelligent Systems 6 (2) (2024) 2300070
work page 2024
-
[10]
H. Wang, Z. Zhu, H. Jin, R. Wei, L. Bi, W. Zhang, Magnetic soft robots: Design, actuation, and function, Journal of Alloys and Compounds 922 (2022) 166219
work page 2022
-
[11]
B. Mosadegh, P. Polygerinos, C. Keplinger, S. Wennstedt, R. F. Shepherd, U. Gupta, J. Shim, K. Bertoldi, C. J. Walsh, G. M. Whitesides, Pneumatic networks for soft robotics that actuate rapidly, Advanced Functional Materials 24 (15) (2014) 2163–2170
work page 2014
-
[12]
P. Polygerinos, Z. Wang, J. T. Overvelde, K. C. Galloway, R. J. Wood, K. Bertoldi, C. J. Walsh, Modeling of soft fiber-reinforced bending actuators, IEEE Transactions on Robotics 31 (3) (2015) 778–789
work page 2015
-
[13]
M. S. Xavier, C. D. Tawk, A. Zolfagharian, J. Pinskier, D. Howard, T. Young, J. Lai, S. M. Harrison, Y. K. Yong, M. Bodaghi, et al., Soft pneumatic actuators: A review of design, fabrication, modeling, sensing, control and applications, IEEE Access 10 (2022) 59442–59485
work page 2022
-
[14]
S. Kim, C. Laschi, B. Trimmer, Soft robotics: a bioinspired evolution in robotics, Trends in Biotechnology 31 (5) (2013) 287–294
work page 2013
- [15]
-
[16]
D. Guo, Z. Kang, Chamber layout design optimization of soft pneumatic robots, Smart Materials and Structures 29 (2) (2020) 025017
work page 2020
-
[17]
F. Chen, Z. Song, S. Chen, G. Gu, X. Zhu, Morphological design for pneumatic soft actuators and robots with desired deformation behavior, IEEE Transactions on Robotics 39 (6) (2023) 4408–4428
work page 2023
-
[18]
E. M. de Souza, E. C. N. Silva, Topology optimization applied to the design of actuators driven by pressure loads, Structural and Multidisciplinary Optimization 61 (5) (2020) 1763–1786
work page 2020
-
[19]
Y. Lu, L. Tong, Optimal design and experimental validation of 3d printed soft pneumatic actuators, Smart Materials and Structures 31 (11) (2022) 115010
work page 2022
-
[20]
J. C. Chi, C. H. Liu, Topology optimization of a soft pneumatic actuator considering design-dependent loads, IEEE/ASME Transactions on Mechatronics (2025)
work page 2025
- [21]
- [22]
- [23]
-
[24]
B. Caasenbrood, A. Pogromsky, H. Nijmeijer, A computational design framework for pressure-driven soft robots through nonlinear topology optimization, in: 2020 3rd IEEE international conference on soft robotics (RoboSoft), IEEE, 2020, pp. 633–638
work page 2020
-
[25]
A. Dalklint, M. Wallin, D. Tortorelli, Simultaneous shape and topology optimization of in- flatable soft robots, Computer Methods in Applied Mechanics and Engineering 420 (2024) 116751
work page 2024
- [26]
- [27]
-
[28]
G. L. Bluhm, O. Sigmund, K. Poulios, Internal contact modeling for finite strain topology optimization, Computational Mechanics 67 (2021) 1099–1114
work page 2021
- [29]
-
[30]
J. Simo, R. L. Taylor, K. Pister, Variational and projection methods for the volume con- straint in finite deformation elasto-plasticity, Computer Methods in Applied Mechanics and Engineering 51 (1-3) (1985) 177–208
work page 1985
- [31]
-
[32]
Stroud, Approximate Calculation of Multiple Integrals, Prentice-Hall, Inc., 1971
A. Stroud, Approximate Calculation of Multiple Integrals, Prentice-Hall, Inc., 1971
work page 1971
-
[33]
R. Cools, An encyclopaedia of cubature formulas, Journal of Complexity 19 (3) (2003) 445–453, Oberwolfach Special Issue
work page 2003
-
[34]
B. S. Lazarov, O. Sigmund, Filters in topology optimization based on Helmholtz-type differential equations, International Journal for Numerical Methods in Engineering 86 (6) (2011) 765–781. 20
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.