SmoCap: Unified Scale-Pose Canonicalization with Proxy-Mapped Trust-Region QP
Pith reviewed 2026-05-21 04:37 UTC · model grok-4.3
The pith
SmoCap jointly estimates morphology and posture in a unified trust-region QP to prevent compensation artifacts in marker-based motion capture.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SmoCap is a leakage-resistant framework that performs joint scale and pose canonicalization by solving a constrained trust-region quadratic program at each step, using analytical Jacobians derived from a proxy map in a sparse control subspace. This joint estimation in a unified optimization avoids the morphology-posture compensation that arises in stage-wise pipelines.
What carries the argument
The proxy-mapped trust-region quadratic program, which uses a low-dimensional proxy map to couple pose and scale parameters and stabilize weakly observed directions during joint optimization.
If this is right
- Validated knee flexion angles match fluoroscopy ground truth with an RMSE of 2.9 degrees.
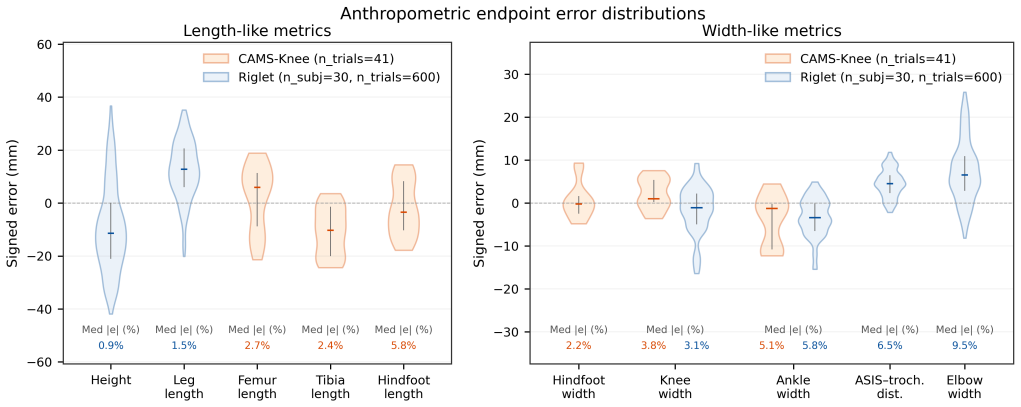
- Anthropometric endpoint errors average around 3 percent when compared to measured body dimensions.
- Compared to segment-wise scaling, the method reduces marker RMSE, flexion-extension error, and anthropometric errors in leakage tests.
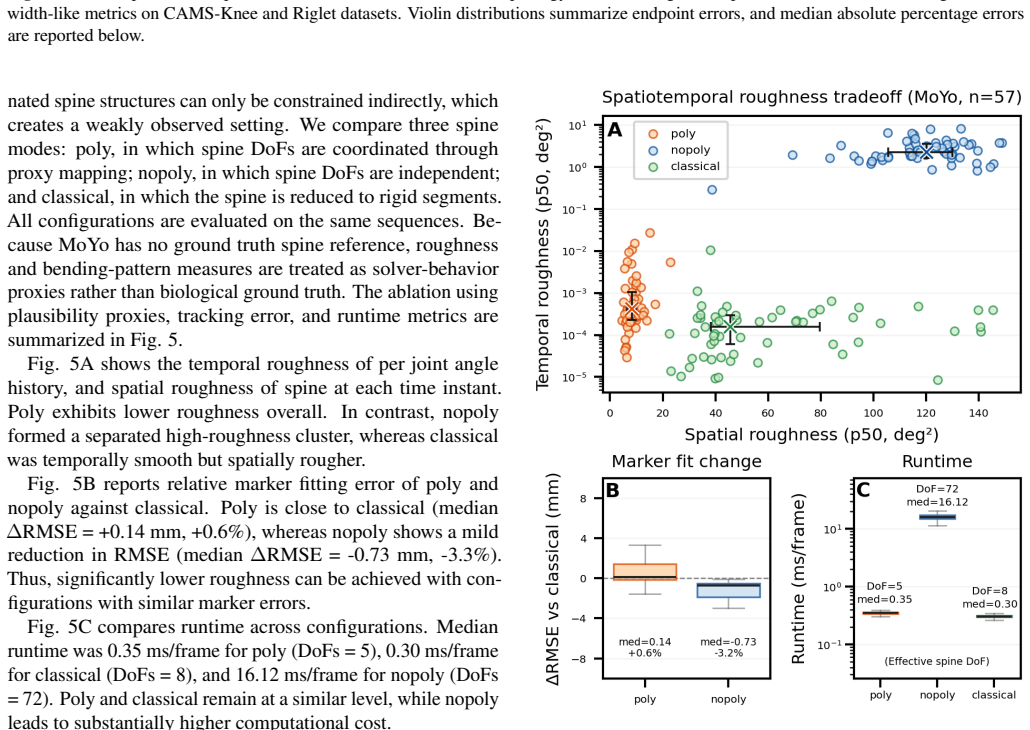
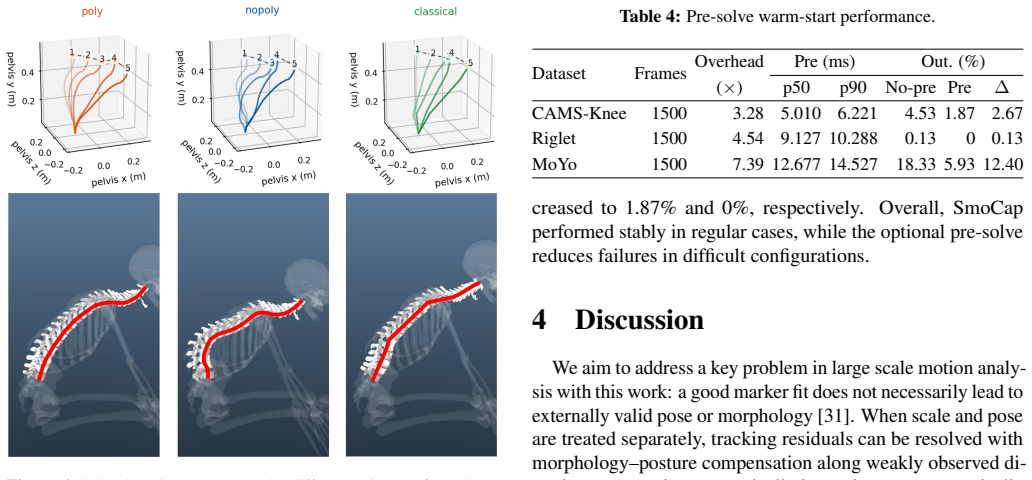
- Spine motion remains expressive and coordinated in extreme poses with only a small increase in fitting error of 0.14 mm.
- Processing completes in 0.2 to 0.3 milliseconds per frame using only two or three iterations per solve.
Where Pith is reading between the lines
- Applying the same proxy coupling to multi-view or depth-sensor inputs could further improve robustness in uncontrolled environments.
- The framework might serve as a post-processing step for existing motion capture datasets to retroactively reduce scale-pose leakage.
- Choosing the proxy dimension based on observed data sparsity could adapt the method to different capture setups without manual adjustment.
- Extension to animal or non-humanoid models would test whether the coordinated structure assumption holds beyond standard human skeletons.
Load-bearing premise
That mapping the optimization variables through a low-dimensional proxy preserves the ability to fit observed markers accurately while enforcing coordination and stabilizing weak directions.
What would settle it
Running the method on a dataset of subjects with highly asymmetric body proportions or in movements where individual vertebral segments move independently, and checking if the anthropometric endpoint error exceeds that of a segment-wise scaling baseline.
Figures



read the original abstract
Objective: Stage-wise workflows that separate model scaling and inverse kinematics can induce morphology-posture compensation, resulting in anatomically inconsistent yet numerically acceptable solutions, especially in weakly observed directions. We present SmoCap, a leakage-resistant canonicalization framework that estimates morphology and posture jointly in each local trust-region quadratic program (QP) within a sparse control subspace. Methods: SmoCap solves a constrained trust-region QP with analytical proxy-mapped pose and scale Jacobians. The low dimensional proxy map stabilizes weakly observed directions and drives coordinated structures. An optional pre-solve provides warm starts in difficult configurations. The framework is evaluated using cohort fluoroscopy knee motion, anthropometric ground truth, and extreme yoga sequences. Results: SmoCap achieved 2.9 degree knee flexion RMSE against fluoroscopy, and a pooled anthropometric endpoint error around 3%. In the leakage audit against segment wise scaling, SmoCap also reduced marker RMSE, FE error, and anthropometric endpoint error. Proxy coupling preserved expressive and coordinated spine motion with marginal fitting error increase (+0.14 mm, +0.6%) against baseline models in yoga ablation. Median marker RMSE was around 20 mm, and median runtime was 0.204-0.332 ms/frame, achieved with consistently 2-3 iterations. Conclusion: SmoCap provides an externally validated unified coupling-aware scale-pose framework, making externally consistent motion canonicalization practical at dataset scale.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents SmoCap, a leakage-resistant canonicalization framework for joint morphology and posture estimation in motion capture. It formulates the problem as a constrained trust-region QP solved with analytical proxy-mapped pose and scale Jacobians in a sparse control subspace, optionally with a pre-solve warm start. The method is evaluated on cohort fluoroscopy knee motion, anthropometric ground truth, and extreme yoga sequences, reporting 2.9° knee flexion RMSE against fluoroscopy, ~3% pooled anthropometric endpoint error, reduced marker/FE/anthropometric errors versus segment-wise scaling baselines, and preservation of expressive spine motion with only marginal error increase (+0.14 mm marker RMSE, +0.6%) in yoga ablation. Median runtime is 0.204–0.332 ms/frame with 2–3 iterations.
Significance. If the proxy-map construction and stabilization properties hold, the work offers a practical, externally validated alternative to stage-wise scaling-plus-IK pipelines that can reduce morphology-posture compensation artifacts at dataset scale while maintaining real-time performance. The explicit external validation against fluoroscopy and anthropometrics, together with the reported runtime and iteration counts, strengthens the case for adoption in large-scale motion capture pipelines.
major comments (2)
- [Results] Results (yoga ablation paragraph): the claim that 'proxy coupling preserved expressive and coordinated spine motion' rests on aggregate marker RMSE and anthropometric endpoint error increases of +0.14 mm and +0.6%. These metrics do not directly measure spine range of motion, inter-segment angle coordination, or effective rank reduction in the spine subspace; a direct test (e.g., comparison of spine flexion/extension histograms or Jacobian singular values) is needed to confirm the low-dimensional proxy map does not bias toward under-expressive solutions.
- [Methods] Methods (description of proxy-mapped Jacobians): the abstract and results invoke 'analytical proxy-mapped pose and scale Jacobians' and a 'low dimensional proxy map' that 'stabilizes weakly observed directions,' yet no explicit construction of the proxy map, its dimensionality, or the derivation of the mapped Jacobians is provided. This detail is load-bearing for the central claim that the QP avoids new fitting artifacts while driving coordinated structures.
minor comments (2)
- [Abstract] Abstract and results: report error bars or standard deviations alongside the 2.9° RMSE, 3% endpoint error, and median runtime figures to allow assessment of variability across subjects and trials.
- [Results] Results: clarify the exact definition of 'pooled anthropometric endpoint error' and how the leakage audit against segment-wise scaling was performed (e.g., which segments, which scaling parameters held fixed).
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive report. We address each major comment below and have revised the manuscript to incorporate the suggested improvements where they strengthen the presentation and support for our claims.
read point-by-point responses
-
Referee: [Results] Results (yoga ablation paragraph): the claim that 'proxy coupling preserved expressive and coordinated spine motion' rests on aggregate marker RMSE and anthropometric endpoint error increases of +0.14 mm and +0.6%. These metrics do not directly measure spine range of motion, inter-segment angle coordination, or effective rank reduction in the spine subspace; a direct test (e.g., comparison of spine flexion/extension histograms or Jacobian singular values) is needed to confirm the low-dimensional proxy map does not bias toward under-expressive solutions.
Authors: We agree that the original metrics provide only indirect evidence for preservation of expressive spine motion. In the revised manuscript we have added direct supporting analyses in the yoga ablation subsection: histograms comparing spine flexion/extension distributions between the proxy-mapped and baseline solutions, together with the singular values of the spine-subspace Jacobian to quantify effective rank. These additions confirm that the low-dimensional proxy does not induce under-expressiveness while still delivering the reported marginal error increase. revision: yes
-
Referee: [Methods] Methods (description of proxy-mapped Jacobians): the abstract and results invoke 'analytical proxy-mapped pose and scale Jacobians' and a 'low dimensional proxy map' that 'stabilizes weakly observed directions,' yet no explicit construction of the proxy map, its dimensionality, or the derivation of the mapped Jacobians is provided. This detail is load-bearing for the central claim that the QP avoids new fitting artifacts while driving coordinated structures.
Authors: The referee correctly notes that the construction details were insufficiently explicit. We have expanded the Methods section with a dedicated subsection that (i) defines the proxy map as a sparse linear selection matrix of dimension 18 (9 pose + 9 scale controls) derived from principal modes of coordinated skeletal motion, (ii) gives the closed-form derivation of the analytical proxy-mapped Jacobians as the composition of the standard kinematic Jacobian with the proxy matrix, and (iii) includes pseudocode for map construction and the resulting QP. These additions make the stabilization mechanism fully reproducible and directly support the central claim. revision: yes
Circularity Check
No significant circularity; external validation against fluoroscopy and anthropometrics
full rationale
The paper describes a trust-region QP solver using analytical proxy-mapped Jacobians for joint scale-pose estimation. Performance metrics such as 2.9° knee flexion RMSE and ~3% anthropometric endpoint error are reported against independent external references (fluoroscopy ground truth and anthropometric measurements), not derived from or equivalent to the fitted parameters themselves. The proxy map's stabilization of weakly observed directions is presented as a design property with empirical ablation support (e.g., marginal +0.14 mm RMSE increase), but these are measured outcomes rather than tautological redefinitions. No equations reduce by construction to inputs, no self-citation chains bear the central claim, and no uniqueness theorems or ansatzes are smuggled in. The framework is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
SmoCap solves a constrained trust-region QP with analytical proxy-mapped pose and scale Jacobians. The low dimensional proxy map stabilizes weakly observed directions and drives coordinated structures.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Proxy coupling preserved expressive and coordinated spine motion with marginal fitting error increase (+0.14 mm, +0.6%)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
SMPL: a skinned multi-person linear model
M. Loper, N. Mahmood, J. Romero, G. Pons-Moll, and M. J. Black, “SMPL: A skinned multi-person linear model,” ACM Trans. Graph., vol. 34, no. 6, pp. 1–16, 2015, doi: 10.1145/2816795.2818013
-
[2]
AMASS: Archive of motion capture as surface shapes,
N. Mahmood, N. Ghorbani, N. F. Troje, G. Pons-Moll, and M. J. Black, “AMASS: Archive of motion capture as surface shapes,” inProc. IEEE/CVF Int. Conf. Comput. Vis., 2019, pp. 5442–5451
work page 2019
-
[3]
GroundLink: A dataset unifying human body movement and ground reaction dynamics,
X. Han, B. Senderling, S. To, D. Kumar, E. Whiting, and J. Saito, “GroundLink: A dataset unifying human body movement and ground reaction dynamics,” inProc. SIGGRAPH Asia Conf. Papers, 2023, pp. 1–10, doi: 10.1145/3610548.3618247
-
[4]
On-field player workload exposure and knee injury risk monitoring via deep learning,
W. R. Johnson, A. Mian, D. G. Lloyd, and J. A. Alderson, “On-field player workload exposure and knee injury risk monitoring via deep learning,”J. Biomech., vol. 93, pp. 185–193, 2019, doi: 10.1016/j.jbiomech.2019.07.002
-
[5]
Deepmimic: Example-guided deep reinforcement learning of physics-based character skills
X. B. Peng, P. Abbeel, S. Levine, and M. van de Panne, “DeepMimic: Example-guided deep reinforce- ment learning of physics-based character skills,”ACM Trans. Graph., vol. 37, no. 4, pp. 1–14, 2018, doi: 10.1145/3197517.3201311
-
[6]
In: 2023 IEEE/CVF International Conference on Computer Vision (ICCV)
Z. Luo, J. Cao, A. Winkler, K. Kitani, and W. Xu, “Per- petual humanoid control for real-time simulated avatars,” inProc. IEEE/CVF Int. Conf. Comput. Vis., 2023, pp. 10861–10870, doi: 10.1109/ICCV51070.2023.01000
-
[7]
Design of patient-specific gait modifications for knee osteoarthritis rehabilitation,
B. J. Fregly, J. A. Reinbolt, K. L. Rooney, K. H. Mitchell, and T. L. Chmielewski, “Design of patient-specific gait modifications for knee osteoarthritis rehabilitation,”IEEE Trans. Biomed. Eng., vol. 54, no. 9, pp. 1687–1695, 2007, doi: 10.1109/TBME.2007.891934
-
[8]
T. W. Lu and J. J. O’Connor, “Bone position estimation from skin marker co-ordinates using global optimisation with joint constraints,”J. Biomech., vol. 32, no. 2, pp. 129–134, 1999, doi: 10.1016/S0021-9290(98)00158-4
-
[9]
Kinematic analysis of over-determinate biomechan- ical systems,
M. S. Andersen, M. Damsgaard, and J. Rasmussen, “Kinematic analysis of over-determinate biomechan- ical systems,”Comput. Methods Biomech. Biomed. Eng., vol. 12, no. 4, pp. 371–384, 2009, doi: 10.1080/10255840802459412
-
[10]
S. Duprey, L. Ch `eze, and R. Dumas, “Influence of joint constraints on lower limb kinematics estima- tion from skin markers using global optimization,”J. Biomech., vol. 43, no. 14, pp. 2858–2862, 2010, doi: 10.1016/j.jbiomech.2010.06.010
-
[11]
Scaling of musculoskeletal models from static and dynamic trials,
M. E. Lund, M. S. Andersen, M. de Zee, and J. Ras- mussen, “Scaling of musculoskeletal models from static and dynamic trials,”Int. Biomech., vol. 2, no. 1, pp. 1–11, 2015, doi: 10.1080/23335432.2014.993706
-
[12]
Shape model constrained scaling improves repeatability of gait data,
D. Bakke and T. Besier, “Shape model constrained scaling improves repeatability of gait data,”J. Biomech., vol. 107, 2020, Art. no. 109838, doi: 10.1016/j.jbiomech.2020.109838
-
[13]
Shape-model scaling is more robust than linear scaling to marker place- ment error,
D. Bakke, P. Ortega-Auriol, and T. Besier, “Shape-model scaling is more robust than linear scaling to marker place- ment error,”J. Biomech., vol. 160, 2023, Art. no. 111805, doi: 10.1016/j.jbiomech.2023.111805
-
[14]
Re- peatability of an optimised lower body model,
I. W. Charlton, P. Tate, P. Smyth, and L. Roren, “Re- peatability of an optimised lower body model,”Gait Posture, vol. 20, no. 2, pp. 213–221, 2004, doi: 10.1016/j.gaitpost.2003.09.004
-
[15]
Determination of patient-specific multi-joint kinematic models through two-level optimiza- tion,
J. A. Reinboltet al., “Determination of patient-specific multi-joint kinematic models through two-level optimiza- tion,”J. Biomech., vol. 38, no. 3, pp. 621–626, 2005, doi: 10.1016/j.jbiomech.2004.03.031
-
[16]
A computational framework to predict post-treatment outcome for gait-related disorders,
J. A. Reinbolt, R. T. Haftka, T. L. Chmielewski, and B. J. Fregly, “A computational framework to predict post-treatment outcome for gait-related disorders,”Med. Eng. Phys., vol. 30, no. 4, pp. 434–443, 2008, doi: 10.1016/j.medengphy.2007.05.005
-
[17]
M. S. Andersen, M. Damsgaard, B. MacWilliams, and J. Rasmussen, “A computationally efficient optimisation- based method for parameter identification of kinemat- ically determinate and over-determinate biomechan- ical systems,”Comput. Methods Biomech. Biomed. Eng., vol. 13, no. 2, pp. 171–183, 2010, doi: 10.1080/10255840903067080
-
[18]
Analysis of musculoskeletal sys- tems in the AnyBody Modeling System,
M. Damsgaard, J. Rasmussen, S. T. Christensen, E. Surma, and M. de Zee, “Analysis of musculoskeletal sys- tems in the AnyBody Modeling System,”Simul. Model. Pract. Theory, vol. 14, no. 8, pp. 1100–1111, 2006, doi: 10.1016/j.simpat.2006.09.001
-
[19]
A generic detailed rigid-body lumbar spine model,
M. de Zee, L. Hansen, C. Wong, J. Rasmussen, and E. B. Simonsen, “A generic detailed rigid-body lumbar spine model,”J. Biomech., vol. 40, no. 6, pp. 1219–1227, 2007, doi: 10.1016/j.jbiomech.2006.05.030
-
[20]
J. Li, C. Xu, Z. Chen, S. Bian, L. Yang, and C. Lu, “Hy- brIK: A hybrid analytical-neural inverse kinematics solu- tion for 3D human pose and shape estimation,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit., 2021, pp. 3383–3393
work page 2021
-
[21]
MANIKIN: Biomechanically accurate neural inverse kinematics for human motion estimation,
J. Jiang, P. Streli, X. Luo, C. Gebhardt, and C. Holz, “MANIKIN: Biomechanically accurate neural inverse kinematics for human motion estimation,” inComputer Vision – ECCV 2024, Lecture Notes in Computer Sci- ence, vol. 15060. Cham, Switzerland: Springer, 2025, pp. 128–146, doi: 10.1007/978-3-031-72627-9 8
-
[22]
OpenCap: Human movement dynamics from smartphone videos
S. D. Uhlrichet al., “OpenCap: Human movement dynamics from smartphone videos,”PLOS Comput. Biol., vol. 19, no. 10, 2023, Art. no. e1011462, doi: 10.1371/journal.pcbi.1011462. 9
-
[23]
K. Werlinget al., “AddBiomechanics: Automating model scaling, inverse kinematics, and inverse dynamics from human motion data through sequential optimization,” PLOS ONE, vol. 18, no. 11, 2023, Art. no. e0295152, doi: 10.1371/journal.pone.0295152
-
[24]
Differentiable biomechanics unlocks op- portunities for markerless motion capture,
R. J. Cotton, “Differentiable biomechanics unlocks op- portunities for markerless motion capture,” arXiv preprint arXiv:2402.17192, 2024
-
[25]
Mu- joco: A physics engine for model-based control
E. Todorov, T. Erez, and Y . Tassa, “MuJoCo: A physics engine for model-based control,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst., 2012, pp. 5026–5033, doi: 10.1109/IROS.2012.6386109
-
[26]
A comprehensive assessment of the musculoskeletal system: The CAMS-Knee data set,
W. R. Tayloret al., “A comprehensive assessment of the musculoskeletal system: The CAMS-Knee data set,”J. Biomech., vol. 65, pp. 32–39, 2017, doi: 10.1016/j.jbiomech.2017.09.022
-
[27]
L. Rigletet al., “3D motion analysis dataset of healthy young adult volunteers walking and running on over- ground and treadmill,”Sci. Data, vol. 11, no. 1, 2024, Art. no. 556, doi: 10.1038/s41597-024-03420-y
-
[28]
T2m-gpt: Generating human motion from textual descriptions with discrete representations
S. Tripathi, L. M ¨uller, C.-H. P. Huang, O. Taheri, M. J. Black, and D. Tzionas, “3D human pose estimation via intuitive physics,” inProc. IEEE/CVF Conf. Com- put. Vis. Pattern Recognit., 2023, pp. 4713–4725, doi: 10.1109/cvpr52729.2023.00457
-
[29]
University of Portsmouth - Dog Mo- tion Capture,
A. Counsell, “University of Portsmouth - Dog Mo- tion Capture,” YouTube video, Dec. 2, 2016. [Online]. Available: https://www.youtube.com/watch? app=desktop&v=OYh0jBDjNf4. Accessed: Mar. 18, 2024
work page 2016
-
[30]
The Poses for Equine Research Dataset (PFERD),
C. Liet al., “The Poses for Equine Research Dataset (PFERD),”Sci. Data, vol. 11, no. 1, 2024, Art. no. 497, doi: 10.1038/s41597-024-03312-1
-
[31]
J. L. Hicks, T. K. Uchida, A. Seth, A. Rajagopal, and S. L. Delp, “Is my model good enough? Best practices for verification and validation of musculoskeletal models and simulations of movement,”J. Biomech. Eng., vol. 137, no. 2, 2015, Art. no. 020905, doi: 10.1115/1.4029304
-
[32]
A marker registration method to improve joint angles computed by constrained inverse kinematics,
J. J. Dunne, T. K. Uchida, T. F. Besier, S. L. Delp, and A. Seth, “A marker registration method to improve joint angles computed by constrained inverse kinematics,” PLOS ONE, vol. 16, no. 5, 2021, Art. no. e0252425, doi: 10.1371/journal.pone.0252425
-
[33]
M. A. Price, A. K. LaPr `e, R. T. Johnson, B. R. Um- berger, and F. C. Sup IV , “A model-based motion cap- ture marker location refinement approach using inverse kinematics from dynamic trials,”Int. J. Numer . Methods Biomed. Eng., vol. 36, no. 1, 2020, Art. no. e3283, doi: 10.1002/cnm.3283
-
[34]
E. S. Grood and W. J. Suntay, “A joint coordinate system for the clinical description of three-dimensional motions: Application to the knee,”J. Biomech. Eng., vol. 105, no. 2, pp. 136–144, 1983, doi: 10.1115/1.3138397
-
[35]
OpenSim: Open-source software to create and an- alyze dynamic simulations of movement,
S. L. Delp, F. C. Anderson, A. S. Arnold, P. Loan, A. Habib, C. T. John, E. Guendelman, and D. G. The- len, “OpenSim: Open-source software to create and an- alyze dynamic simulations of movement,”IEEE Trans. Biomed. Eng., vol. 54, no. 11, pp. 1940–1950, 2007, doi: 10.1109/TBME.2007.901024
-
[36]
H. Kainz, H. X. Hoang, C. Stockton, R. S. Boyd, D. G. Lloyd, and C. P. Carty, “Accuracy and relia- bility of marker-based approaches to scale the pelvis, thigh, and shank segments in musculoskeletal models,”J. Appl. Biomech., vol. 33, no. 5, pp. 354–360, 2017, doi: 10.1123/jab.2016-0282
-
[37]
Tibiofemoral and tibiocalcaneal motion during walking: External vs. skeletal markers,
C. Reinschmidtet al., “Tibiofemoral and tibiocalcaneal motion during walking: External vs. skeletal markers,” Gait Posture, vol. 6, no. 2, pp. 98–109, 1997, doi: 10.1016/S0966-6362(97)01110-7
-
[38]
R. Tranberg, T. Saari, R. Z¨ugner, and J. K¨arrholm, “Simul- taneous measurements of knee motion using an optical tracking system and radiostereometric analysis (RSA),” Acta Orthop., vol. 82, no. 2, pp. 171–176, 2011, doi: 10.3109/17453674.2011.570675
-
[39]
A. F¨andriks, R. Z ¨ugner, B. Shareghi, J. K ¨arrholm, and R. Tranberg, “Skin and cluster markers underestimate knee flexion during controlled motions. Evaluation of 12 patients with knee arthroplasty using radiosterometric analysis as reference,”J. Biomech., vol. 182, 2025, Art. no. 112591, doi: 10.1016/j.jbiomech.2025.112591
-
[40]
Validation of a portable marker-based motion analysis system,
S. Wanget al., “Validation of a portable marker-based motion analysis system,”J. Orthop. Surg. Res., vol. 16, no. 1, 2021, Art. no. 425, doi: 10.1186/s13018-021-02576-2
-
[41]
D. L. Benoit, D. K. Ramsey, M. Lamontagne, L. Xu, P. Wretenberg, and P. Renstr¨om, “Effect of skin movement artifact on knee kinematics during gait and cutting mo- tions measured in vivo,”Gait Posture, vol. 24, no. 2, pp. 152–164, 2006, doi: 10.1016/j.gaitpost.2005.04.012
-
[42]
D. L. Miranda, M. J. Rainbow, J. J. Crisco, and B. C. Fleming, “Kinematic differences between optical motion capture and biplanar videoradiography during a jump- cut maneuver,”J. Biomech., vol. 46, no. 3, pp. 567–573, 2013, doi: 10.1016/j.jbiomech.2012.09.023
-
[43]
C. V . Hammondet al., “The neuromusculoskeletal mod- eling pipeline: MATLAB-based model personalization and treatment optimization functionality for OpenSim,” J. NeuroEng. Rehabil., vol. 22, no. 1, 2025, Art. no. 112, doi: 10.1186/s12984-025-01629-5. 10
-
[44]
A. Leardini, L. Chiari, U. Della Croce, and A. Cappozzo, “Human movement analysis using stereophotogrammetry. Part 3: Soft tissue artifact assessment and compensation,” Gait Posture, vol. 21, no. 2, pp. 212–225, 2005, doi: 10.1016/j.gaitpost.2004.05.002
-
[45]
Soft tissue artifact assessment during treadmill walking in subjects with total knee arthroplasty,
A. Barr´e, J.-P. Thiran, B. M. Jolles, N. Theumann, and K. Aminian, “Soft tissue artifact assessment during treadmill walking in subjects with total knee arthroplasty,”IEEE Trans. Biomed. Eng., vol. 60, no. 11, pp. 3131–3140, 2013, doi: 10.1109/TBME.2013.2268938
-
[46]
M. S. Andersen, M. Damsgaard, J. Rasmussen, D. K. Ramsey, and D. L. Benoit, “A linear soft tissue artefact model for human movement analysis: Proof of concept using in vivo data,”Gait Posture, vol. 35, no. 4, pp. 606– 611, 2012, doi: 10.1016/j.gaitpost.2011.11.032
-
[47]
OpenSim Moco: Musculoskeletal optimal control,
C. L. Dembia, N. A. Bianco, A. Falisse, J. L. Hicks, and S. L. Delp, “OpenSim Moco: Musculoskeletal optimal control,”PLOS Comput. Biol., vol. 16, no. 12, 2020, Art. no. e1008493, doi: 10.1371/journal.pcbi.1008493
-
[48]
Auto- mated optimization of residual reduction algorithm pa- rameters in OpenSim,
J. T. Sturdy, A. K. Silverman, and N. T. Pickle, “Auto- mated optimization of residual reduction algorithm pa- rameters in OpenSim,”J. Biomech., vol. 137, 2022, Art. no. 111087, doi: 10.1016/j.jbiomech.2022.111087
-
[49]
B. J. Fregly, J. A. Reinbolt, and T. L. Chmielewski, “Evaluation of a patient-specific cost function to pre- dict the influence of foot path on the knee adduc- tion torque during gait,”Comput. Methods Biomech. Biomed. Eng., vol. 11, no. 1, pp. 63–71, 2008, doi: 10.1080/10255840701552036
-
[50]
Muscle–tendon unit scaling methods of Hill-type muscu- loskeletal models: An overview,
F. Heinen, M. E. Lund, J. Rasmussen, and M. de Zee, “Muscle–tendon unit scaling methods of Hill-type muscu- loskeletal models: An overview,”Proc. Inst. Mech. Eng. H, J. Eng. Med., vol. 230, no. 10, pp. 976–984, 2016, doi: 10.1177/0954411916659894
-
[51]
L. Modenese, E. Ceseracciu, M. Reggiani, and D. G. Lloyd, “Estimation of musculotendon parameters for scaled and subject specific musculoskeletal models using an optimization technique,”J. Biomech., vol. 49, no. 2, pp. 141–148, 2016, doi: 10.1016/j.jbiomech.2015.11.006. 11
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.