WiXus: A Wheeled-Legged Robot with Wire-Driven Environmental Utilizing to Integrate Mobility and Manipulation
Pith reviewed 2026-05-21 04:37 UTC · model grok-4.3
The pith
A wire-driven mechanism that anchors to the environment lets wheeled-legged robots repurpose their legs for manipulation and tool use.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By fusing a wheeled-legged mechanism with a wire-driven mechanism that utilizes the external environment, the robot achieves three-dimensional mobility through coordinated actuation and repurpose its legs for object manipulation and tool utilization by suspending the body.
What carries the argument
The wire-driven environmental utilizing mechanism, which attaches wires to external points to support or suspend the robot body and thereby free the legs from locomotion duties.
If this is right
- Coordination of wire-driven and wheeled-legged actuation produces three-dimensional mobility including cliff climbing.
- Suspending the body with wires allows the legs to function as arms for object manipulation tasks.
- Tool utilization such as cutting with loppers becomes possible while the body remains supported.
- Standard planar locomotion with the wheeled-legged drive continues to work without change.
- Wire-driven environmental utilization is presented as a new design principle that broadens what wheeled-legged robots can accomplish.
Where Pith is reading between the lines
- Robots using this method could operate in varied terrain without carrying separate manipulator arms if environmental anchors are available.
- The same anchoring idea might apply to other mobile platforms to combine locomotion with manipulation in unstructured spaces.
- Automatic wire attachment and release systems would be a logical next development to reduce reliance on manual setup.
- Performance in settings where attachment points shift or become unavailable would clarify the limits of the approach.
Load-bearing premise
That suitable external attachment points exist and remain stable enough for wire-driven support across the demonstrated tasks without requiring continuous manual setup or interfering with wheeled-legged motion.
What would settle it
A test in which the robot must perform the same manipulation tasks in an open flat area with no accessible stable attachment points such as walls, branches, or fixtures would show whether the claimed extension of the operational domain holds.
Figures










read the original abstract
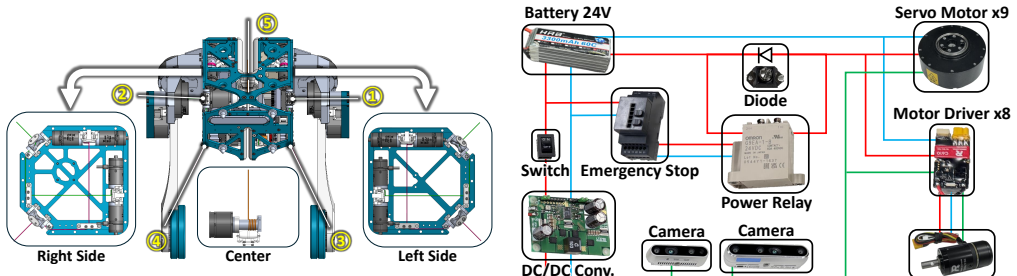
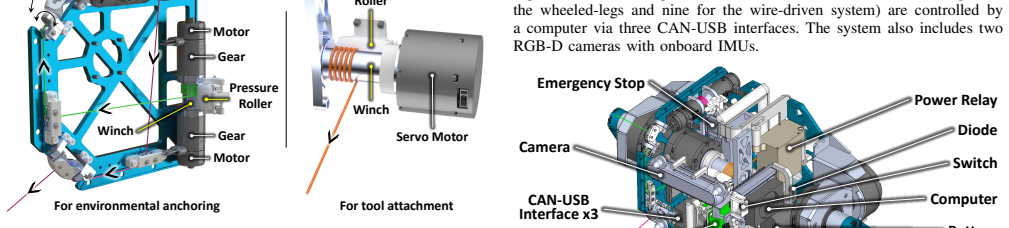
Wheeled-legged robots, which have wheels at their feet and achieve high mobility by coordinating wheel drive and leg drive, have been developed. These robots have been developed purely as platforms specialized for locomotion. Therefore, they do not have a means to repurpose their legs for roles other than locomotion, such as object manipulation or tool utilization. In this paper, we address the problem of how to draw out the potential task-execution capability of the legs by freeing them from the roles of locomotion through external body support. To this end, we propose and develop a new robot, WiXus, which fuses a wheeled-legged mechanism with a wire-driven mechanism that utilizes the external environment. The developed WiXus demonstrates not only planar locomotion with wheeled-legged drive, but also three-dimensional mobility such as cliff climbing by coordinating wire-driven and wheeled-legged actuation. Furthermore, by suspending the body with wire-driven actuation, WiXus successfully repurpose its legs as arms to perform object manipulation, (e.g., rescuing a dog (stuffed animal)), and tool utilization (e.g., harvesting an apple (mockup) with loppers). This study demonstrates that the approach of utilizing the environment with wire-driven actuation is a new design principle that extends the operational domain of wheeled-legged robots.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces WiXus, a wheeled-legged robot that integrates a wire-driven mechanism to utilize external environmental attachment points for body support. This design enables standard planar locomotion, three-dimensional tasks such as cliff climbing via coordinated wire and wheeled-legged actuation, and repurposing of the legs for manipulation (e.g., rescuing a stuffed dog or harvesting a mock apple with loppers) by suspending the body. The central claim is that wire-driven environmental utilization constitutes a new design principle that extends the operational domain of wheeled-legged robots beyond pure locomotion.
Significance. If the demonstrations hold under quantitative scrutiny, the work could meaningfully advance hybrid robot design by showing how environmental wire support can decouple locomotion from manipulation without extra actuators, with potential applications in rescue and agriculture. The qualitative success in body-suspension tasks highlights a practical integration of mobility and manipulation, though the absence of metrics limits immediate assessment of generalizability.
major comments (2)
- [Abstract] Abstract and demonstrations: The reported successes in cliff climbing and body-suspension manipulation tasks are presented only qualitatively, with no quantitative metrics on success rates, load capacities, wire tension, setup time, or failure modes. This is load-bearing for the central claim of a 'new design principle,' as it leaves the robustness of environmental utilization unverified.
- [Design and Experiments] Design and experimental sections: The assumption that suitable external attachment points exist, remain stable under load, and do not interfere with wheeled-legged coordination is stated but lacks quantitative validation (e.g., attachment selection criteria, dynamic stability data, or interference measurements in unstructured settings). This directly affects the practicality asserted for extending the operational domain.
minor comments (1)
- [Abstract] The abstract phrasing 'Wire-Driven Environmental Utilizing to Integrate' is awkward and could be revised for clarity and grammatical precision.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below, providing our responses and indicating revisions made to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract and demonstrations: The reported successes in cliff climbing and body-suspension manipulation tasks are presented only qualitatively, with no quantitative metrics on success rates, load capacities, wire tension, setup time, or failure modes. This is load-bearing for the central claim of a 'new design principle,' as it leaves the robustness of environmental utilization unverified.
Authors: We agree that quantitative metrics would strengthen the evidence for the robustness of the proposed design principle. The original demonstrations were intended as proof-of-concept illustrations of the new approach. In the revised manuscript, we have added quantitative data from repeated trials, including success rates (9/10 for cliff climbing, 8/10 for body-suspension manipulation), average wire tension under load (approximately 15 N), and descriptions of observed failure modes such as occasional wire slippage on smooth surfaces. These additions provide better verification without altering the core contribution. revision: yes
-
Referee: [Design and Experiments] Design and experimental sections: The assumption that suitable external attachment points exist, remain stable under load, and do not interfere with wheeled-legged coordination is stated but lacks quantitative validation (e.g., attachment selection criteria, dynamic stability data, or interference measurements in unstructured settings). This directly affects the practicality asserted for extending the operational domain.
Authors: We acknowledge that more quantitative validation on attachment points would enhance the assessment of practicality. We have revised the design and experimental sections to include explicit attachment selection criteria based on load capacity and accessibility, along with dynamic stability measurements from force sensor data collected during load-bearing tests. Interference with wheeled-legged coordination was observed to be minimal in the tested environments. However, exhaustive validation across all possible unstructured real-world settings exceeds the scope of the current work and is identified as a direction for future research. revision: partial
Circularity Check
No circularity: engineering prototype with demonstrations only
full rationale
The paper introduces and demonstrates a physical robot prototype (WiXus) that integrates wheeled-legged locomotion with wire-driven environmental support, showing qualitative success in tasks such as cliff climbing and body-suspended manipulation. No equations, parameter fittings, derivations, or closed-form claims appear in the provided text. The central assertion of a 'new design principle' is advanced through hardware implementation and observed behaviors rather than any self-referential reduction, self-citation chain, or ansatz that loops back to its own inputs. The contribution is externally verifiable via the described experiments and does not rely on load-bearing assumptions that collapse by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Wheeled-legged robots achieve high mobility by coordinating wheel drive and leg drive
- ad hoc to paper External environment can provide stable attachment points for wire-driven support
invented entities (1)
-
WiXus robot with integrated wire-driven environmental utilization mechanism
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
This study demonstrates that the approach of utilizing the environment with wire-driven actuation is a new design principle that extends the operational domain of wheeled-legged robots.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Whole-Body MPC and Online Gait Sequence Generation for Wheeled-Legged Robots,
M. Bjelonic, R. Grandia, O. Harley, C. Galliard, S. Zimmermann, and M. Hutter, “Whole-Body MPC and Online Gait Sequence Generation for Wheeled-Legged Robots,” inProceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021, pp. 8388–8395
work page 2021
-
[2]
Learning robust autonomous navigation and locomotion for wheeled- legged robots,
J. Lee, M. Bjelonic, A. Reske, L. Wellhausen, T. Miki, and M. Hutter, “Learning robust autonomous navigation and locomotion for wheeled- legged robots,”Science Robotics, vol. 9, no. 89, p. eadi9641, 2024
work page 2024
-
[3]
System Design and Balance Control of a Bipedal Leg-wheeled Robot,
C. Zhang, T. Liu, S. Song, and M. Q.-H. Meng, “System Design and Balance Control of a Bipedal Leg-wheeled Robot,” inProceedings of the 2019 IEEE International Conference on Robotics and Biomimetics, 2019, pp. 1869–1874
work page 2019
-
[4]
Dynamic Height Balance Control for Bipedal Wheeled Robot Based on ROS-Gazebo,
T. Liu, C. Zhang, S. Song, and M. Q.-H. Meng, “Dynamic Height Balance Control for Bipedal Wheeled Robot Based on ROS-Gazebo,” inProceedings of the 2019 IEEE International Conference on Robotics and Biomimetics, 2019, pp. 1875–1880
work page 2019
-
[5]
Design and control of multi-mode wheeled-bipedal robot with parallel mechanism,
Z. Yang, Z. Bian, and W. Zhang, “Design and control of multi-mode wheeled-bipedal robot with parallel mechanism,” in2023 International Conference on Communications, Computing and Artificial Intelligence (CCCAI), 2023, pp. 69–74
work page 2023
-
[6]
Ascento: A Two-Wheeled Jumping Robot,
V . Klemm, A. Morra, C. Salzmann, F. Tschopp, K. Bodie, L. Gulich, N. K¨ung, D. Mannhart, C. Pfister, M. Vierneisel, F. Weber, R. Deuber, and R. Siegwart, “Ascento: A Two-Wheeled Jumping Robot,” in Proceedings of the 2019 IEEE International Conference on Robotics and Automation, 2019, pp. 7515–7521
work page 2019
-
[7]
TITA (Direct Drive Technology),
“TITA (Direct Drive Technology),” https://shop.directdrive.com/ products/tita
-
[8]
DIABOLO (Direct Drive Technol- ogy),
“DIABOLO (Direct Drive Technol- ogy),” https://shop.directdrive.com/products/ diablo-world-s-first-direct-drive-self-balancing-wheeled-leg-robot
- [9]
- [10]
-
[11]
“Handle (Boston Dynamics),” https://robotsguide.com/robots/handle
-
[12]
Design and Experiments of a Novel Hydraulic Wheel-Legged Robot (WLR),
X. Li, H. Zhou, H. Feng, S. Zhang, and Y . Fu, “Design and Experiments of a Novel Hydraulic Wheel-Legged Robot (WLR),” inProceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018, pp. 3292–3297
work page 2018
-
[13]
WLR-II, a Hose-less Hydraulic Wheel-legged Robot,
X. Li, H. Zhou, S. Zhang, H. Feng, and Y . Fu, “WLR-II, a Hose-less Hydraulic Wheel-legged Robot,” inProceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019, pp. 4339–4346
work page 2019
-
[14]
Continuous Collision Detection for a Robotic Arm Mounted on a Cable-Driven Parallel Robot,
D. Bury, J.-B. Izard, M. Gouttefarde, and F. Lamiraux, “Continuous Collision Detection for a Robotic Arm Mounted on a Cable-Driven Parallel Robot,” inProceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019, pp. 8097–8102
work page 2019
-
[15]
Skycam-an aerial robotic camera system,
L. L. Cone, “Skycam-an aerial robotic camera system,”Byte, vol. 10, no. 10, p. 122, 1985
work page 1985
-
[16]
UA V/UGV Autonomous Cooperation: UA V assists UGV to climb a cliff by attaching a tether,
T. Miki, P. Khrapchenkov, and K. Hori, “UA V/UGV Autonomous Cooperation: UA V assists UGV to climb a cliff by attaching a tether,” inProceedings of the 2019 IEEE International Conference on Robotics and Automation, 2019, pp. 8041–8047
work page 2019
-
[17]
CubiX: Portable Wire-Driven Parallel Robot Connecting to and Utilizing the Environment,
S. Inoue, K. Kawaharazuka, T. Suzuki, S. Yuzaki, K. Okada, and M. Inaba, “CubiX: Portable Wire-Driven Parallel Robot Connecting to and Utilizing the Environment,” inProceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, pp. 1296–1301
work page 2024
-
[18]
——, “Overcoming Physical Limitations Utilizing the Surrounding Environment with a Wire-Driven Multipurpose Robot,”Advanced Robotics Research, vol. 1, no. 1, p. 202400021
-
[19]
S. Inoue, K. Kawaharazuka, K. Yoneda, S. Yuzaki, Y . Sahara, T. Suzuki, and K. Okada, “An RGB-D Camera-Based Multi-Small Flying Anchors Control for Wire-Driven Robots Connecting to the Environment,” inProceedings of the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025, pp. 20 442– 20 447
work page 2025
-
[20]
M. Labb ´e and F. Michaud, “RTAB-Map as an open-source lidar and visual simultaneous localization and mapping library for large-scale and long-term online operation,”Journal of Field Robotics, vol. 36, no. 2, pp. 416–446, 2019
work page 2019
-
[21]
The SMACH High-Level Executive [ROS News],
J. Bohren and S. Cousins, “The SMACH High-Level Executive [ROS News],”IEEE Robotics & Automation Magazine, vol. 17, no. 4, pp. 18–20, 2010
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.