Overcoming "Physics Shock" in Earth Observation A Heteroscedastic Uncertainty Framework for PINN-based Flood Inference
Pith reviewed 2026-06-30 16:34 UTC · model grok-4.3
The pith
Modeling sensor uncertainty lets PINNs enforce flood physics only where SAR data is reliable, raising IoU by 25 percent.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
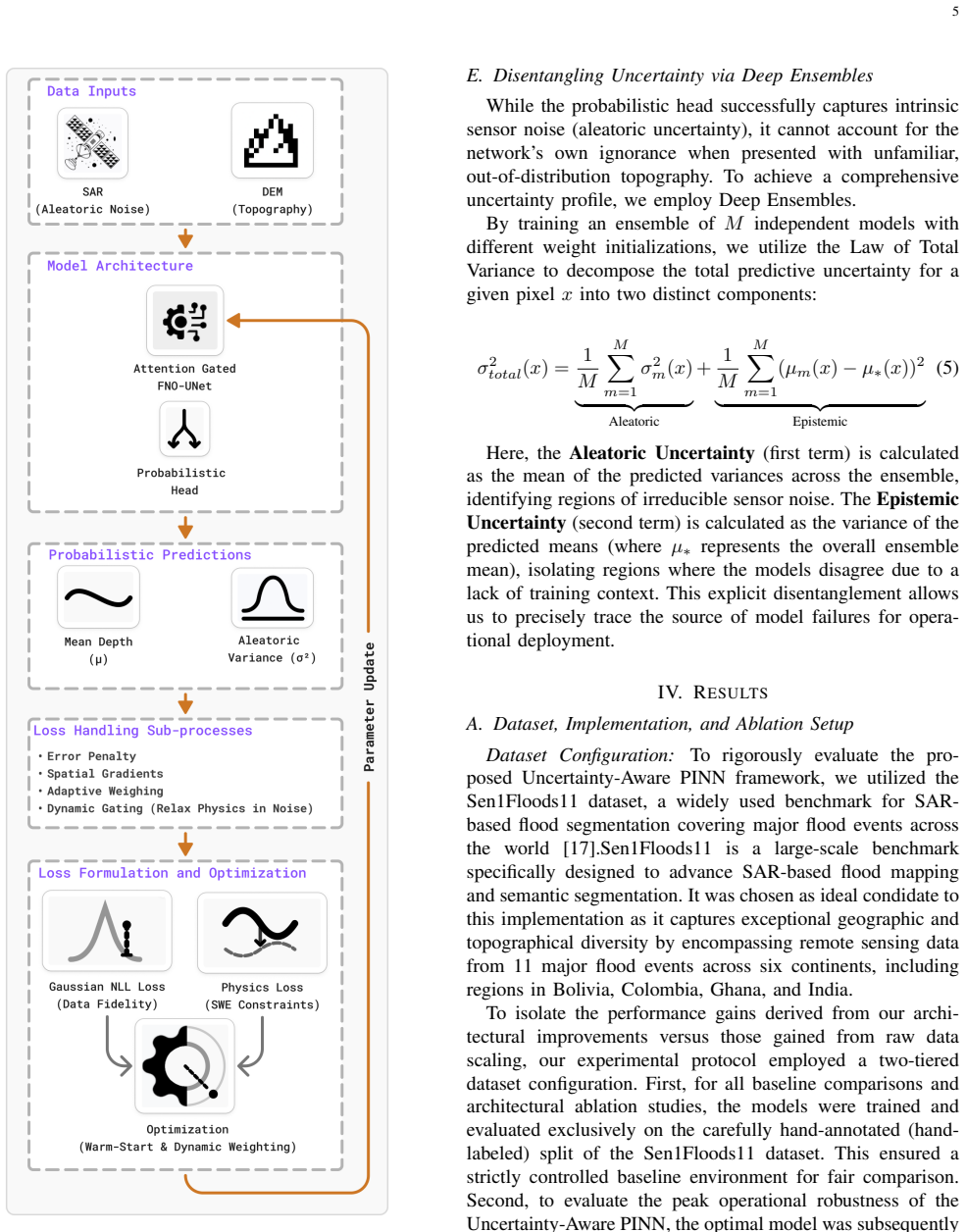
By integrating a dynamic Warm-Start protocol and modeling heteroscedastic aleatoric uncertainty via a negative log-likelihood objective, the network learns to dynamically relax physical constraints in regions of high sensor noise while strictly enforcing them in high-confidence areas, stabilizing multi-objective optimization on noisy SAR inputs and yielding higher-fidelity flood extent predictions.
What carries the argument
Heteroscedastic aleatoric uncertainty modeled in the loss function that scales the weight of the physics residual term according to local data confidence.
If this is right
- Training remains stable on real SAR flood data instead of diverging.
- Flood extent maps achieve higher overlap with ground truth than deterministic PINNs.
- Deep ensembles separate sensor noise from terrain ignorance to give calibrated uncertainty maps.
- The outputs remain consistent with governing hydrological equations in high-confidence zones.
Where Pith is reading between the lines
- The same uncertainty-weighting pattern could be tested on other physics-informed remote-sensing tasks such as soil moisture retrieval where observation noise also varies spatially.
- An ablation that removes the warm-start protocol would show whether the uncertainty term alone is sufficient to prevent divergence.
- Operational agencies could use the resulting per-pixel is high enough to trigger automated alerts without manual review.
Load-bearing premise
The assumption that catastrophic gradient divergence in PINNs comes mainly from applying rigid spatial derivatives to unconditioned noisy SAR data, and that uncertainty weighting can selectively relax those constraints without introducing new inconsistencies.
What would settle it
Training the deterministic baseline on the Sen1Floods11 dataset and checking whether gradient norms explode during optimization while the uncertainty version stays stable and the reported IoU gap disappears when input noise is synthetically lowered.
Figures






read the original abstract
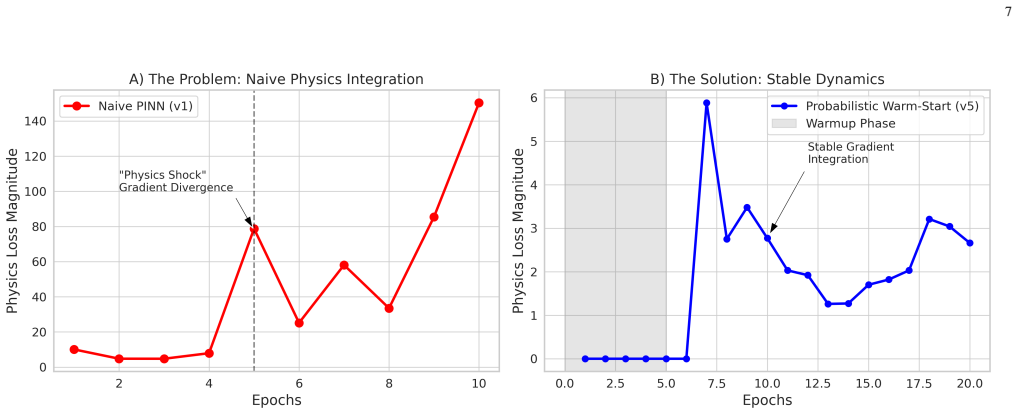
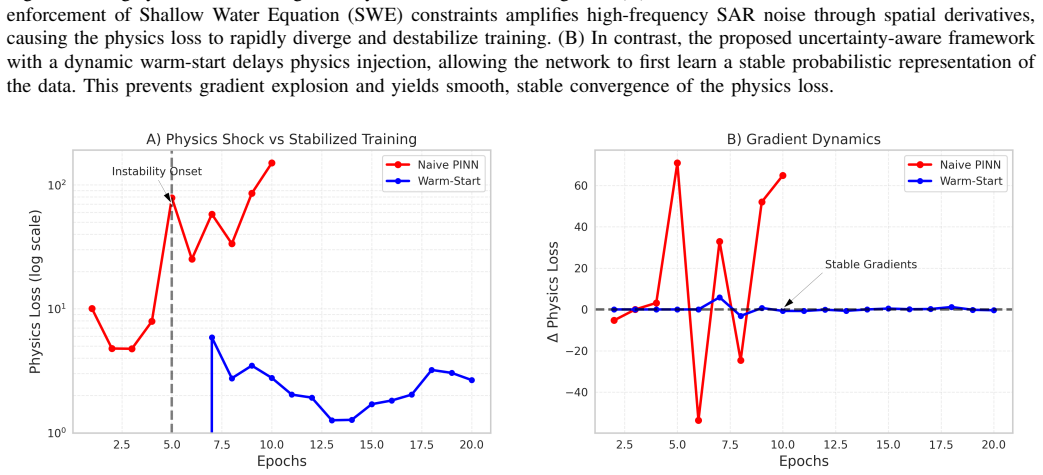
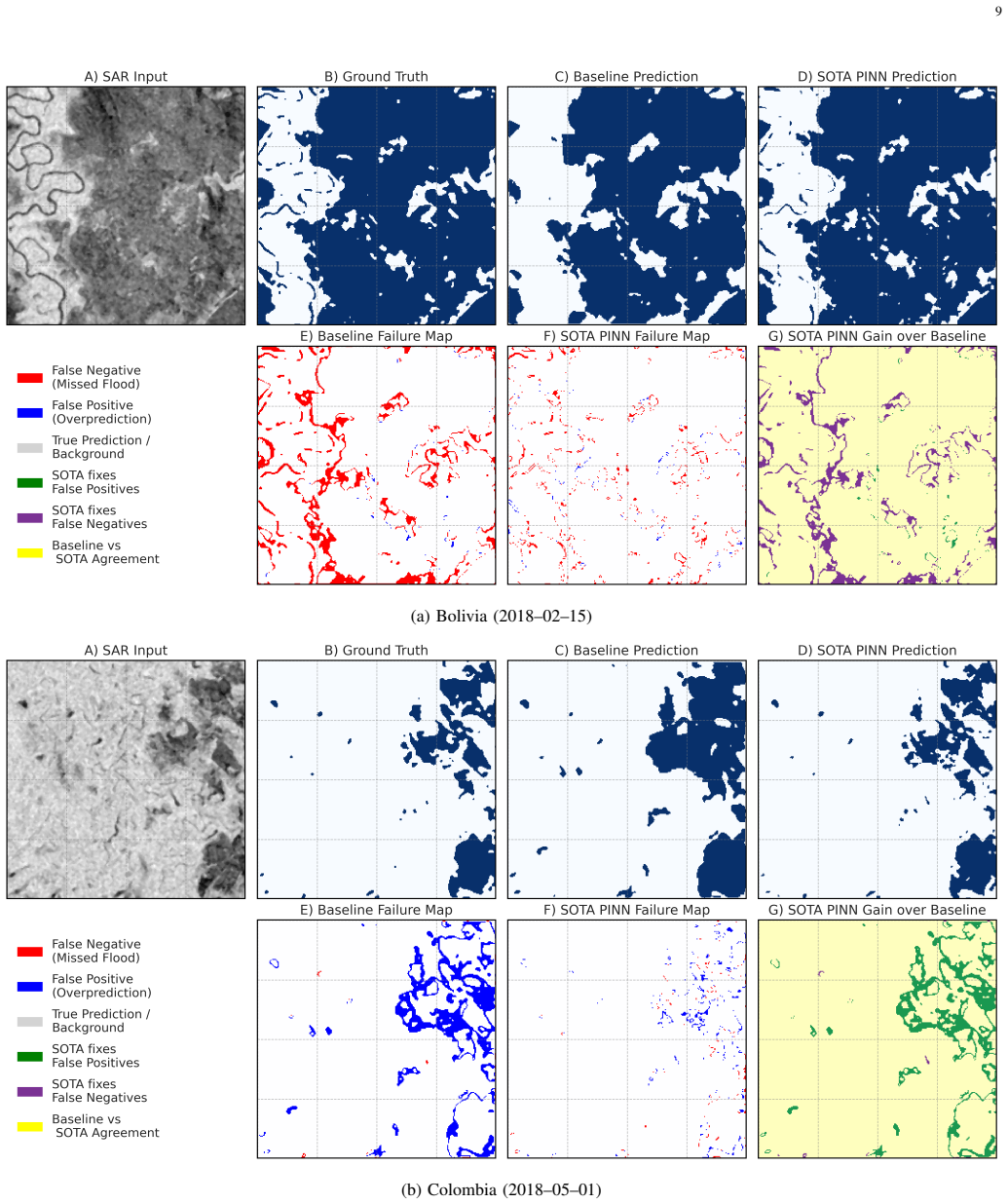
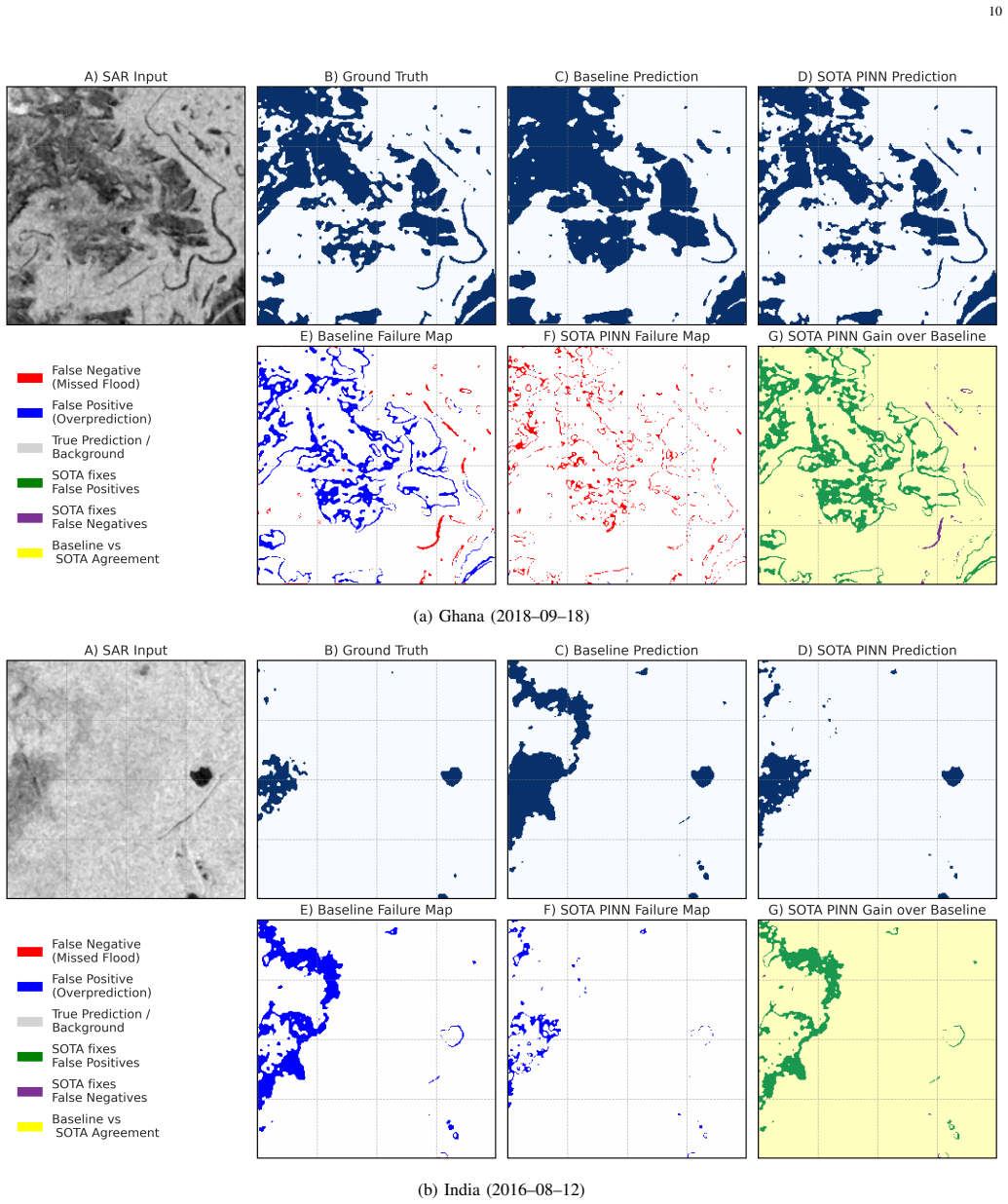
Rapid and accurate flood extent mapping from Remote Sensing data, such as Synthetic Aperture Radar (SAR), is critical for operational disaster response, but standard Deep Learning models often produce physically impossible predictions due to a lack of hydrological constraints. While PhysicsInformed Neural Networks (PINNs) attempt to address this by embedding governing laws directly into the loss function, their application to real-world remote sensing data frequently fails. Enforcing rigid spatial derivatives (e.g., the 2D Shallow Water Equations) onto unconditioned latent spaces attempting to fit noisy SAR speckle causes catastrophic gradient divergence, a phenomenon we term Physics Shock. In this paper, we propose a novel Uncertainty-Aware PINN framework tailored specifically for applied Earth Observation that addresses this instability. By integrating a dynamic Warm-Start protocol and modeling heteroscedastic aleatoric uncertainty via a negative log-likelihood objective, the network learns to dynamically relax physical constraints in regions of high sensor noise while strictly enforcing them in high-confidence areas. Evaluated on the Sen1Floods11 dataset, our probabilistic Attention-Gated FNO-UNet successfully stabilizes multi-objective optimization, achieving a +25% relative improvement in Intersection over Union (IoU) compared to deterministic baselines. Furthermore, through Deep Ensembles, we successfully disentangle intrinsic sensor noise from out-of-distribution terrain ignorance, providing operational agencies with highly calibrated, physically consistent confidence bounds for robust disaster mitigation and real-time decision-making.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a heteroscedastic uncertainty-aware PINN framework for flood extent mapping from SAR imagery that combines a dynamic Warm-Start protocol with negative log-likelihood training to model aleatoric uncertainty. This is claimed to mitigate 'Physics Shock' (catastrophic gradient divergence when enforcing 2D Shallow Water Equations on noisy data) by selectively relaxing constraints in high-uncertainty regions while enforcing them in low-uncertainty regions. The Attention-Gated FNO-UNet is evaluated on Sen1Floods11 and reports a +25% relative IoU gain over deterministic baselines; Deep Ensembles are additionally used to separate sensor noise from epistemic uncertainty.
Significance. If the selective constraint enforcement mechanism is verified, the framework could meaningfully extend PINN applicability to noisy real-world Earth-observation tasks by providing both improved segmentation accuracy and calibrated, physically consistent uncertainty estimates for operational use. The explicit treatment of heteroscedastic aleatoric uncertainty and the warm-start stabilization strategy address a documented practical failure mode of physics-informed models on SAR data.
major comments (1)
- [Abstract] Abstract: the central claim that heteroscedastic uncertainty modeling plus warm-start enables selective relaxation of 2D Shallow Water Equation residuals (lower residuals in low-uncertainty pixels, higher in high-uncertainty pixels) is not supported by any reported PDE residual analysis, ablation on residual maps, or quantitative comparison against a standard PINN baseline. The sole quantitative result is the +25% relative IoU improvement, which could arise from the Attention-Gated FNO-UNet architecture, the NLL objective, or ensembling rather than from stabilized physics enforcement.
minor comments (2)
- [Abstract] Abstract: baseline details, statistical tests, ablation results, and error-bar information for the reported IoU metric are absent, preventing assessment of the empirical claim.
- The manuscript does not describe how the warm-start protocol is scheduled or how the uncertainty threshold for constraint relaxation is chosen; these implementation choices are load-bearing for reproducibility.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. We address the major comment regarding support for the selective relaxation claim below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that heteroscedastic uncertainty modeling plus warm-start enables selective relaxation of 2D Shallow Water Equation residuals (lower residuals in low-uncertainty pixels, higher in high-uncertainty pixels) is not supported by any reported PDE residual analysis, ablation on residual maps, or quantitative comparison against a standard PINN baseline. The sole quantitative result is the +25% relative IoU improvement, which could arise from the Attention-Gated FNO-UNet architecture, the NLL objective, or ensembling rather than from stabilized physics enforcement.
Authors: We agree that the current manuscript lacks explicit PDE residual analysis, residual map ablations, or direct quantitative comparison to a standard PINN baseline, making it difficult to isolate the contribution of selective constraint relaxation from other components. The +25% IoU gain is the primary operational metric, but additional physics-consistency metrics are needed to support the central claim. In the revised version we will add: (1) average PDE residual values for our method versus a deterministic PINN baseline, (2) residual maps, and (3) residual statistics conditioned on uncertainty level to verify lower residuals in low-uncertainty regions. These will help demonstrate that the heteroscedastic modeling and warm-start stabilize physics enforcement. revision: yes
Circularity Check
No circularity: empirical performance claim with no self-referential derivation
full rationale
The paper presents an empirical ML method (heteroscedastic PINN with warm-start and NLL objective) evaluated on Sen1Floods11 for IoU gains. No equations, fitted parameters, or derivations are described that reduce to their own inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems, and the central result is a reported performance delta rather than a mathematical identity. This matches the default case of a self-contained empirical contribution.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Residual wave vision u-net for flood mapping using dual polarization sentinel-1 sar imagery,
A. Jamali, S. K. Roy, L. H. Beni, B. Pradhan, J. Li, and P. Ghamisi, “Residual wave vision u-net for flood mapping using dual polarization sentinel-1 sar imagery,”International Journal of Applied Earth Obser- vation and Geoinformation, vol. 127, p. 103662, 2024
2024
-
[2]
Deepflood for inundated vegetation high-resolution dataset for accurate flood mapping and segmentation,
M. Fawakherji, J. Blay, M. Anokye, L. Hashemi-Beni, and J. Dorton, “Deepflood for inundated vegetation high-resolution dataset for accurate flood mapping and segmentation,”Scientific Data, vol. 12, no. 1, p. 271, 2025
2025
-
[3]
Flood detection with sar: A review of techniques and datasets,
D. Amitrano, G. Di Martino, A. Di Simone, and P. Imperatore, “Flood detection with sar: A review of techniques and datasets,”Remote Sensing, vol. 16, no. 4, p. 656, 2024
2024
-
[4]
Inundated vegetation mapping using sar data: A comparison of polarization configurations of uavsar l-band and sentinel c-band,
A. Salem and L. Hashemi-Beni, “Inundated vegetation mapping using sar data: A comparison of polarization configurations of uavsar l-band and sentinel c-band,”Remote Sensing, vol. 14, no. 24, p. 6374, 2022
2022
-
[5]
Flood extent mapping: An integrated method using deep learning and region growing using uav optical data,
L. Hashemi-Beni and A. A. Gebrehiwot, “Flood extent mapping: An integrated method using deep learning and region growing using uav optical data,”IEEE Journal of Selected Topics in Applied Earth Obser- vations and Remote Sensing, vol. 14, pp. 2127–2135, 2021
2021
-
[6]
Multi-head encoder-decoder deep learning architecture for flood segmentation and mapping through multi-sensor data fusion,
M. Fawakherji and L. Hashemi-Beni, “Multi-head encoder-decoder deep learning architecture for flood segmentation and mapping through multi-sensor data fusion,” inIGARSS 2024-2024 IEEE International Geoscience and Remote Sensing Symposium. IEEE, 2024, pp. 1191– 1195
2024
-
[7]
Physics-informed neural networks for solving the two-dimensional shallow water equations with terrain topography and rainfall source terms,
Y . Tian, S. Ding, L. Huang, G. Su, and J. Chen, “Physics-informed neural networks for solving the two-dimensional shallow water equations with terrain topography and rainfall source terms,”Water Resources Research, vol. 61, no. 9, p. e2025WR040052, 2025
2025
-
[8]
Ai-integrated traffic information system: A synergistic approach of physics informed 16 neural network and gpt-4 for traffic estimation and real-time assistance,
T. S. Gebre, L. Beni, E. T. Wasehun, and F. E. Dorbu, “Ai-integrated traffic information system: A synergistic approach of physics informed 16 neural network and gpt-4 for traffic estimation and real-time assistance,” IEEE Access, vol. 12, pp. 65 869–65 882, 2024
2024
-
[9]
Real-time traffic insights with physics-informed neural networks: Integrating the aw- rascle model and llms,
T. S. Gebre, S. E. Ashebir, J. Blay, and L. H. Beni, “Real-time traffic insights with physics-informed neural networks: Integrating the aw- rascle model and llms,”IEEE Access, vol. PP, no. 99, pp. 1–1, 2025
2025
-
[10]
An integrated framework of gpt-4 and pinn for dynamic traffic estimation and support,
T. S. Gebre and L. Hashemi-Beni, “An integrated framework of gpt-4 and pinn for dynamic traffic estimation and support,” inIGARSS 2024- 2024 IEEE International Geoscience and Remote Sensing Symposium. IEEE, 2024, pp. 5457–5460
2024
-
[11]
A change detection approach to flood mapping in urban areas using terrasar-x,
L. Giustarini, R. Hostache, P. Matgen, G. J.-P. Schumann, P. D. Bates, and D. C. Mason, “A change detection approach to flood mapping in urban areas using terrasar-x,”IEEE Transactions on Geoscience and Remote Sensing, vol. 51, no. 4, p. 2417–2430, Apr. 2013. [Online]. Available: http://dx.doi.org/10.1109/TGRS.2012.2210901
-
[12]
S. Martinis, A. Twele, and S. V oigt, “Towards operational near real-time flood detection using a split-based automatic thresholding procedure on high resolution terrasar-x data,”Natural Hazards and Earth System Sciences, vol. 9, no. 2, p. 303–314, Mar. 2009. [Online]. Available: http://dx.doi.org/10.5194/nhess-9-303-2009
-
[13]
Multichannel deep learning-based architecture for flood detection and mapping,
M. Fawakherji and L. H. Beni, “Multichannel deep learning-based architecture for flood detection and mapping,” inAGU Fall Meeting Abstracts, vol. 2023, no. 722, 2023, pp. NH41B–0722
2023
-
[14]
Flood impact risk map- ping in settlement areas from a 3d perspective: A case study of hurricane matthew,
J. Blay, M. Fawakherji, and L. Hashemi-Beni, “Flood impact risk map- ping in settlement areas from a 3d perspective: A case study of hurricane matthew,” inIGARSS 2024-2024 IEEE International Geoscience and Remote Sensing Symposium. IEEE, 2024, pp. 3939–3942
2024
-
[15]
Ronneberger, P
O. Ronneberger, P. Fischer, and T. Brox,U-Net: Convolutional Networks for Biomedical Image Segmentation. Springer International Publishing, 2015, p. 234–241. [Online]. Available: http://dx.doi.org/10. 1007/978-3-319-24574-4\ 28
2015
-
[16]
Rtformer: Efficient design for real-time semantic segmentation with transformer,
E. Ding, H. Feng, C. Gou, J. Han, J. Wang, J. Wang, and Q. Wu, “Rtformer: Efficient design for real-time semantic segmentation with transformer,” inAdvances in Neural Information Processing Systems 35, ser. NeurIPS 2022. Neural Information Processing Systems Foundation, Inc. (NeurIPS), 2022, p. 7423–7436. [Online]. Available: http://dx.doi.org/10.52202/06...
-
[17]
D. Bonafilia, B. Tellman, T. Anderson, and E. Issenberg, “Sen1floods11: a georeferenced dataset to train and test deep learning flood algorithms for sentinel-1,” in2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). IEEE, Jun. 2020, p. 835–845. [Online]. Available: http://dx.doi.org/10.1109/CVPRW50498. 2020.00113
-
[18]
Flood detection in urban areas using terrasar-x,
D. Mason, R. Speck, B. Devereux, G.-P. Schumann, J. Neal, and P. Bates, “Flood detection in urban areas using terrasar-x,”IEEE Transactions on Geoscience and Remote Sensing, vol. 48, no. 2, p. 882–894, Feb. 2010. [Online]. Available: http://dx.doi.org/10.1109/TGRS.2009.2029236
-
[19]
Nature Reviews Physics , author =
G. E. Karniadakis, I. G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, and L. Yang, “Physics-informed machine learning,”Nature Reviews Physics, vol. 3, no. 6, p. 422–440, May 2021. [Online]. Available: http://dx.doi.org/10.1038/s42254-021-00314-5
-
[20]
Smart traffic solutions: Enhanced uav-based traffic mon- itoring, object detection and ai-enhanced guidance system,
T. S. Gebre, “Smart traffic solutions: Enhanced uav-based traffic mon- itoring, object detection and ai-enhanced guidance system,” Ph.D. dis- sertation, North Carolina Agricultural and Technical State University, 2025
2025
-
[21]
M. Raissi, P. Perdikaris, and G. Karniadakis, “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,”Journal of Computational Physics, vol. 378, p. 686–707, Feb. 2019. [Online]. Available: http://dx.doi.org/10.1016/j.jcp.2018.10.045
-
[22]
Physics-informed neural networks for high-speed flows,
Z. Mao, A. D. Jagtap, and G. E. Karniadakis, “Physics-informed neural networks for high-speed flows,”Computer Methods in Applied Mechanics and Engineering, vol. 360, p. 112789, Mar. 2020. [Online]. Available: http://dx.doi.org/10.1016/j.cma.2019.112789
-
[23]
Understanding and mitigating gradient flow pathologies in physics-informed neural networks,
S. Wang, Y . Teng, and P. Perdikaris, “Understanding and mitigating gradient flow pathologies in physics-informed neural networks,”SIAM Journal on Scientific Computing, vol. 43, no. 5, p. A3055–A3081, Jan
-
[24]
Available: http://dx.doi.org/10.1137/20M1318043
[Online]. Available: http://dx.doi.org/10.1137/20M1318043
-
[25]
S. Wang, X. Yu, and P. Perdikaris, “When and why pinns fail to train: A neural tangent kernel perspective,”Journal of Computational Physics, vol. 449, p. 110768, Jan. 2022. [Online]. Available: http://dx.doi.org/10.1016/j.jcp.2021.110768
-
[26]
Be confident in what you know: Bayesian parameter efficient fine-tuning of vision foundation models,
D. Pandey, S. Pyakurel, and Q. Yu, “Be confident in what you know: Bayesian parameter efficient fine-tuning of vision foundation models,” inAdvances in Neural Information Processing Systems 37, ser. NeurIPS 2024. Neural Information Processing Systems Foundation, Inc. (NeurIPS), 2024, p. 44814–44844. [Online]. Available: http://dx.doi.org/10.52202/079017-1424
-
[27]
Evidential fuzzy rule-based machine learning to quantify classification uncertainty,
H. Shiraishi, H. Ishibuchi, and M. Nakata, “Evidential fuzzy rule-based machine learning to quantify classification uncertainty,” Jun. 2025. [Online]. Available: http://dx.doi.org/10.36227/techrxiv. 174900814.43483543/v1 Tewodros Syum Gebreholds a B.S. in Hydraulic Engineering from Arba Minch University, Ethiopia, in 2009, an M.S. in Civil (Road and Trans...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.