A comparative study of accuracy and rollout stability of temporal surrogate models
Pith reviewed 2026-06-30 12:29 UTC · model grok-4.3
The pith
Models with integrator-like updates achieve more stable and accurate long-horizon predictions of chaotic systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
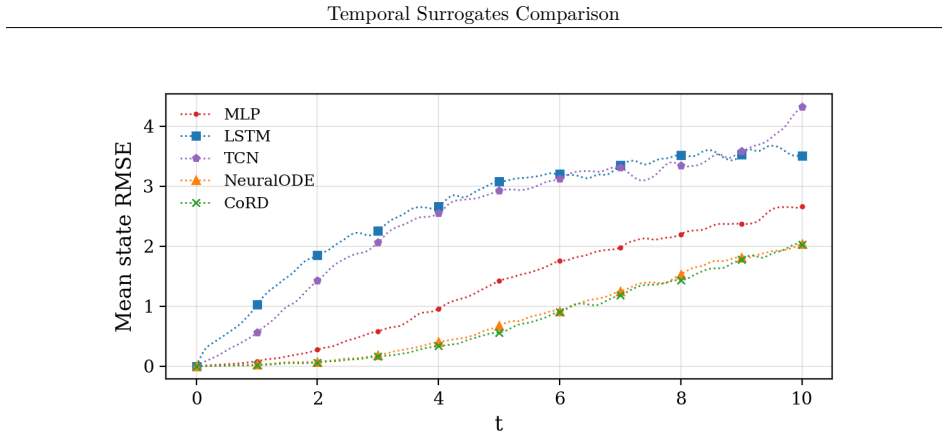
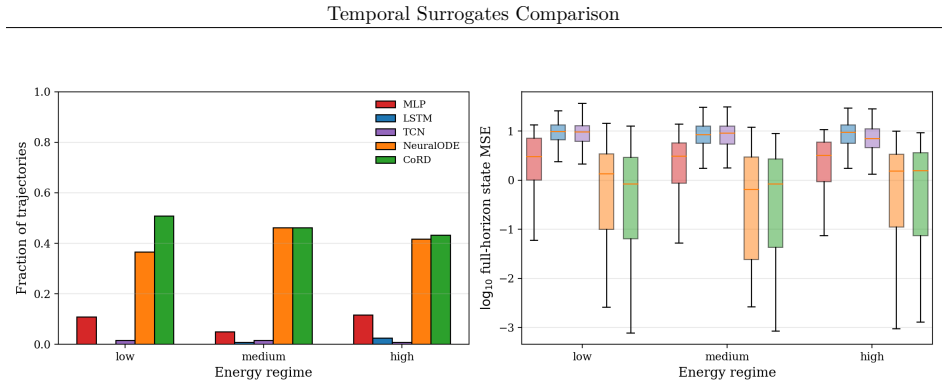
The central claim is that models having integrator-like updates show lower bias and perturbation amplification yielding stable long-horizon rollout and more accurate predictions. This holds both when all models use the same training protocol and when each is individually optimized. The conclusion rests on metrics including local Jacobian norms, relative one-step bias, finite-time Lyapunov growth rates, and attractor geometry comparisons.
What carries the argument
The integrator-like update rule, which advances the state in a manner analogous to a numerical time-stepping scheme rather than a direct residual or recurrent mapping.
If this is right
- Integrator-like models exhibit lower relative one-step bias than other architectures under matched conditions.
- These models show reduced finite-time Lyapunov growth, indicating slower divergence from the true trajectory.
- Long-horizon rollouts remain closer to the true attractor for integrator-like models.
- The categorical performance differences persist even after individual hyperparameter optimization for each model.
- An ablation isolating components of the continuous-update architecture confirms the contribution of the integrator-style step.
Where Pith is reading between the lines
- Architectural bias toward stable integration may matter more than capacity or training details for long-term forecasting tasks.
- Similar integrator-style designs could be tested on other high-dimensional chaotic systems to check if the stability advantage generalizes.
- The attractor analysis suggests these models better preserve invariant measures, which could aid downstream tasks like uncertainty quantification.
- Future work might combine the integrator update with explicit conservation constraints to further reduce bias.
Load-bearing premise
A common training protocol and matched model capacity produce a fair comparison of architectural effects on rollout stability independent of optimization details.
What would settle it
Finding that a non-integrator architecture achieves lower perturbation amplification and better long-horizon accuracy than an integrator-like model on the Kolmogorov flow when capacities are matched would falsify the central claim.
Figures









read the original abstract
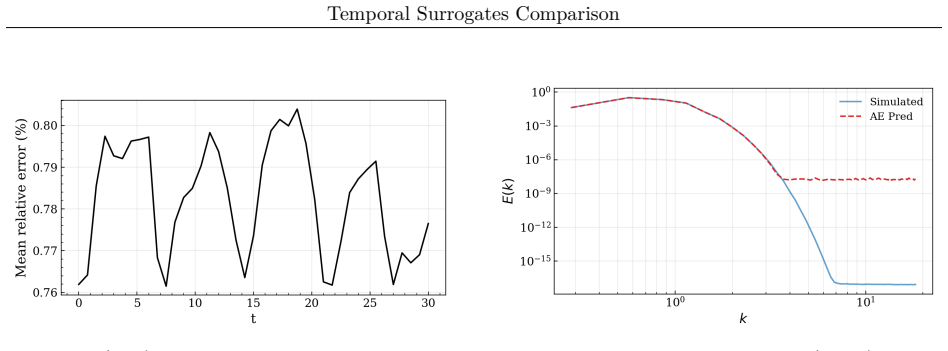
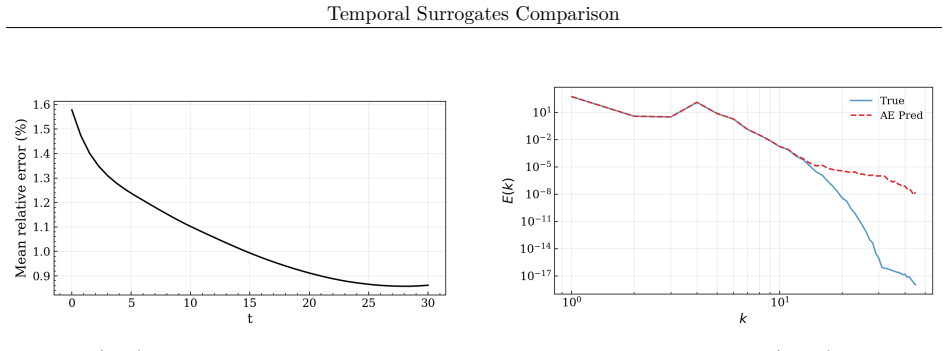
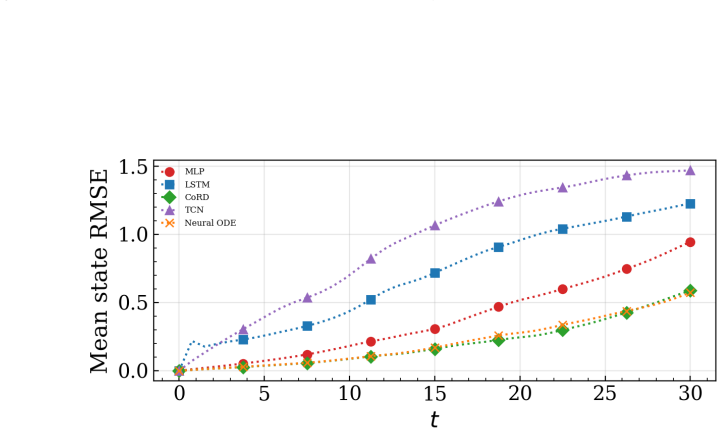
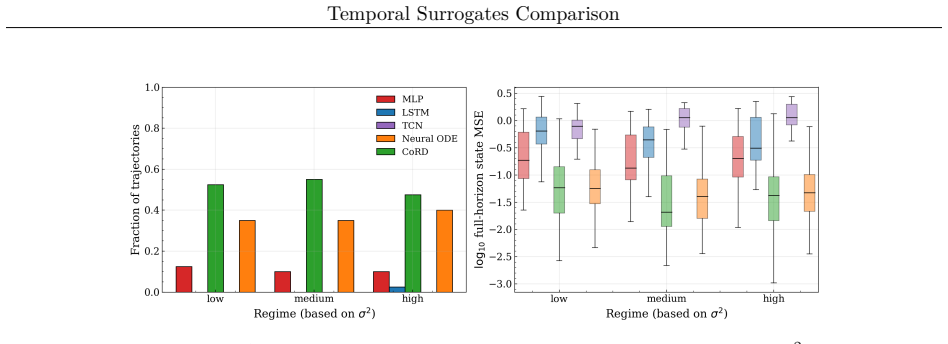
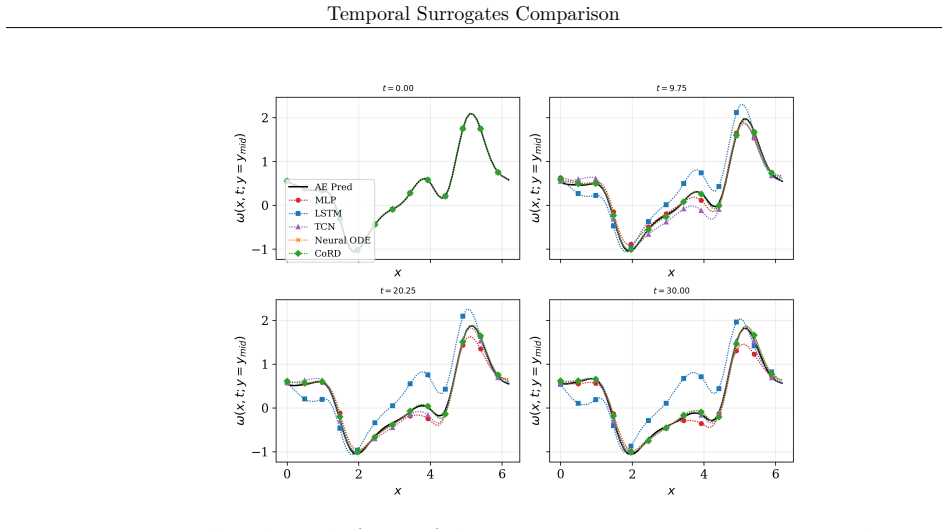
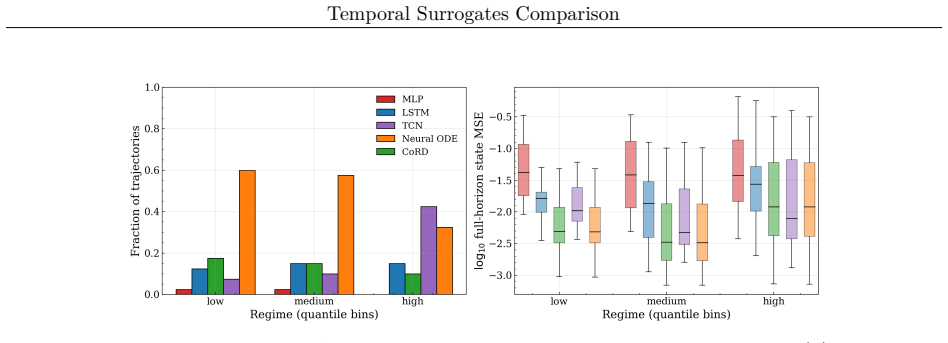
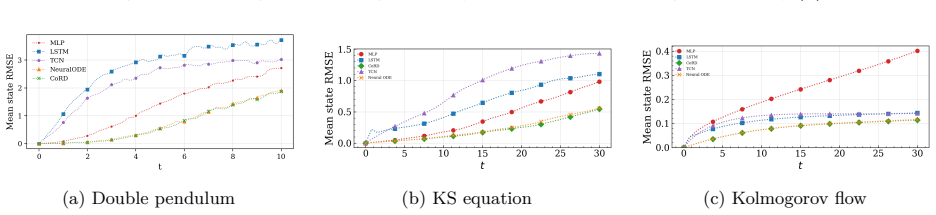
Temporal surrogate models are effective for predicting chaotic dynamical systems where computational cost can be prohibitive. Several deep neural network architectures can be used for such purposes. In this work, a few commonly used architectures are compared using a common training protocol. The objective is to fairly assess the impact of model architectures for long-horizon prediction stability. Experiments are carried out for three problems, the double pendulum, the Kuramoto-Sivashinsky equations, and the Kolmogorov flow. The experiments are carried out with matching model capacity. Analysis is also carried out for a scenario where each model is individually optimized. It is observed that in both scenarios, the models exhibit categorical differences in long-horizon rollouts. For a concrete quantification, stepwise error injections and perturbation amplifications are analyzed using metrics such as local jacobian, relative one-step bias, and finite-time Lyapunov growth. Additionally, an attractor analysis is also conducted to assess how well the learned models replicate the underlying system geometry. An ablation study to isolate the impact of each component of a continuous-update architecture is also carried out. It is concluded that models that having integrator-like updates show lower bias and perturbation amplification yielding stable long-horizon rollout and more accurate predictions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript compares several deep neural network architectures as temporal surrogate models for chaotic dynamical systems (double pendulum, Kuramoto-Sivashinsky equations, Kolmogorov flow). Using a shared training protocol with matched model capacity, plus a second scenario with per-model hyperparameter optimization, the authors report categorical differences in long-horizon rollout behavior. They quantify these via local Jacobian norms, relative one-step bias, finite-time Lyapunov growth, and attractor geometry analysis, concluding that architectures with integrator-like update rules exhibit lower bias and perturbation amplification, yielding more stable and accurate long-term predictions. An ablation study on continuous-update components is also presented.
Significance. If the attribution to update structure can be isolated from training artifacts, the work would supply actionable guidance for selecting surrogate architectures that maintain stability over long rollouts in physics-informed machine learning. The dual-protocol design (common and individually optimized) and use of multiple dynamical systems are positive features; however, the absence of tabulated quantitative results, error bars, or convergence diagnostics in the reported text limits immediate impact.
major comments (2)
- [Experimental protocol] Experimental protocol section: the central claim attributes observed differences in bias and Lyapunov growth to integrator-like updates rather than optimization artifacts. The manuscript states that both a common protocol and individually optimized scenarios were examined, yet provides no explicit evidence (identical random-search budgets, wall-clock limits, or convergence tolerances) that per-model optimization effort was equalized. If loss-landscape conditioning differs across architectures, under-optimized models could exhibit inflated effective bias or growth rates, undermining the architectural attribution.
- [Results and metrics] Results and metrics sections: the abstract and text assert categorical differences supported by local Jacobian, one-step bias, and finite-time Lyapunov metrics, but the provided manuscript text contains no quantitative tables, error bars, or statistical significance tests. Without these, the strength of the reported differences cannot be assessed and the conclusion that integrator-like models are superior remains unverified.
minor comments (2)
- [Abstract] Abstract, line 1: grammatical error ('models that having integrator-like updates').
- [Metrics definitions] Notation for finite-time Lyapunov growth and relative bias should be defined explicitly with equations rather than described only in prose.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and will revise the manuscript accordingly to improve clarity and verifiability of the results.
read point-by-point responses
-
Referee: [Experimental protocol] Experimental protocol section: the central claim attributes observed differences in bias and Lyapunov growth to integrator-like updates rather than optimization artifacts. The manuscript states that both a common protocol and individually optimized scenarios were examined, yet provides no explicit evidence (identical random-search budgets, wall-clock limits, or convergence tolerances) that per-model optimization effort was equalized. If loss-landscape conditioning differs across architectures, under-optimized models could exhibit inflated effective bias or growth rates, undermining the architectural attribution.
Authors: We employed an identical random-search budget of 50 trials per architecture in the individually optimized scenario, using the same convergence tolerance (validation loss plateau for 20 epochs without improvement) and monitoring wall-clock time per trial. Hyperparameter ranges were architecture-specific but the overall search effort and stopping criteria were matched across models. We will revise the Experimental protocol section to explicitly document these budgets, search spaces, and tolerances to eliminate any ambiguity regarding optimization artifacts. revision: yes
-
Referee: [Results and metrics] Results and metrics sections: the abstract and text assert categorical differences supported by local Jacobian, one-step bias, and finite-time Lyapunov metrics, but the provided manuscript text contains no quantitative tables, error bars, or statistical significance tests. Without these, the strength of the reported differences cannot be assessed and the conclusion that integrator-like models are superior remains unverified.
Authors: We agree that the absence of tabulated quantitative results with error bars and significance tests limits assessment of the effect sizes. The current manuscript presents trends via figures, but we will add tables in the Results section reporting means and standard deviations of Jacobian norms, one-step bias, and finite-time Lyapunov exponents over five independent runs, along with p-values from paired statistical tests comparing architectures. This will allow direct evaluation of the reported categorical differences. revision: yes
Circularity Check
No circularity: empirical comparison of architectures
full rationale
The paper conducts an empirical study comparing neural architectures for temporal surrogate modeling on three dynamical systems, using shared training protocols and matched capacities (plus an individually optimized scenario). The central claim—that integrator-like updates yield lower bias, reduced perturbation amplification, and more stable long-horizon rollouts—is presented as an observation from direct metrics (local Jacobian, relative one-step bias, finite-time Lyapunov growth, attractor analysis, and ablation). No equations, fitted parameters, or self-citations are invoked that would reduce this claim to a definitional tautology, a renamed input, or a load-bearing self-reference. The derivation chain consists of experimental measurements rather than any mathematical reduction to prior assumptions or fits.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling
Shaojie Bai, J. Zico Kolter, and Vladlen Koltun. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling.arXiv preprint arXiv:1803.01271,
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
URLhttps://npg.copernicus.org/articles/27/373/2020/
doi:10.5194/npg-27- 373-2020. URLhttps://npg.copernicus.org/articles/27/373/2020/. Ricky T. Q. Chen, Yulia Rubanova, Jesse Bettencourt, and David K Duvenaud. Neural ordinary differential equations. In S. Bengio, H. Wallach, H. Larochelle, K. Grauman, N. Cesa-Bianchi, and R. Garnett, editors,Advances in Neural Information Processing Systems, volume
-
[3]
Miles Cranmer, Sam Greydanus, Stephan Hoyer, Peter Battaglia, David Spergel, and Shirley Ho
URL https://proceedings.neurips.cc/paper_files/paper/2018/file/ 69386f6bb1dfed68692a24c8686939b9-Paper.pdf. Miles Cranmer, Sam Greydanus, Stephan Hoyer, Peter Battaglia, David Spergel, and Shirley Ho. Lagrangian neural networks,
2018
- [4]
-
[5]
doi:https://doi.org/10.1016/0771-050X(80)90013-3
ISSN 0377-0427. doi:https://doi.org/10.1016/0771-050X(80)90013-3. URLhttps://www.sciencedirect.com/science/article/pii/0771050X80900133. Marc Finzi, Ke Alexander Wang, and Andrew Gordon Wilson. Simplifying hamiltonian and lagrangian neural networks via explicit constraints. InProceedings of the 34th International Conference on Neural Information Processin...
-
[6]
URL https://www.sciencedirect.com/science/ article/pii/S0021999119307612
doi:https://doi.org/10.1016/j.jcp.2019.109056. URL https://www.sciencedirect.com/science/ article/pii/S0021999119307612. Anirudh Goyal, Alex Lamb, Ying Zhang, Saizheng Zhang, Aaron Courville, and Yoshua Bengio. Professor forcing: a new algorithm for training recurrent networks. InProceedings of the 30th International Conference on Neural Information Proce...
-
[7]
Available: https://arxiv.org/abs/1906.01563
URLhttps: //arxiv.org/abs/1906.01563. Pengzhan Jin, Zhen Zhang, Aiqing Zhu, Yifa Tang, and George Em Karniadakis. Sympnets: Intrinsic structure-preserving symplectic networks for identifying hamiltonian systems.Neural Networks, 132: 166–179,
-
[8]
doi:https://doi.org/10.1016/j.neunet.2020.08.017
ISSN 0893-6080. doi:https://doi.org/10.1016/j.neunet.2020.08.017. URLhttps://www. sciencedirect.com/science/article/pii/S0893608020303063. Aly-Khan Kassam and Lloyd N. Trefethen. Fourth-order time-stepping for stiff pdes.SIAM Journal on Scientific Computing, 26(4):1214–1233,
-
[9]
doi:10.1137/S1064827502410633. Diederik P. Kingma and Jimmy Ba. Adam: A method for stochastic optimization,
-
[10]
Adam: A Method for Stochastic Optimization
URLhttps: //arxiv.org/abs/1412.6980. Yoshiki Kuramoto. Diffusion-induced chaos in reaction systems.Progress of Theoretical Physics Supplement, 64:346–367, 02
work page internal anchor Pith review Pith/arXiv arXiv
-
[11]
ISSN 0375-9687. doi:10.1143/PTPS.64.346. Zongyi Li, Nikola Kovachki, Kamyar Azizzadenesheli, Burigede Liu, Kaushik Bhattacharya, Andrew Stuart, and Anima Anandkumar. Fourier neural operator for parametric partial differential equations. In International Conference on Learning Representations,
-
[12]
Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators
ISSN ISSN 2522-5839. doi:10.1038/s42256-021-00302-5. URLhttps://www. osti.gov/biblio/2281727. 23 Temporal Surrogates Comparison Dan Lucas and Rich Kerswell. Spatiotemporal dynamics in two-dimensional kolmogorov flow over large domains.Journal of Fluid Mechanics, 750:518–554,
-
[13]
doi:10.1017/jfm.2014.270. Bethany Lusch, J. Nathan Kutz, and Steven L. Brunton. Deep learning for universal linear embeddings of nonlinear dynamics.Nature Communications, 9(1):4950,
-
[14]
Jaideep Pathak, Brian Hunt, Michelle Girvan, Zhixin Lu, and Edward Ott
doi:https://doi.org/10.1038/s41467-018- 07210-0. Jaideep Pathak, Brian Hunt, Michelle Girvan, Zhixin Lu, and Edward Ott. Model-free prediction of large spatiotemporally chaotic systems from data: A reservoir computing approach.Phys. Rev. Lett., 120:024102, Jan
-
[15]
doi:10.1103/PhysRevLett.120.024102. M. Raissi, P. Perdikaris, and G.E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707,
-
[16]
ISSN 0021-9991. doi:https://doi.org/10.1016/j.jcp.2018.10.045. G. I. Sivashinsky. Nonlinear analysis of hydrodynamic instability in laminar flames. i. derivation of basic equations.Acta Astronautica, 4(11–12):1177–1206,
-
[17]
ISSN 1364-5021. doi:10.1098/rspa.2017.0844. Ronald J. Williams and David Zipser. A learning algorithm for continually running fully recurrent neural networks.Neural Computation, 1(2):270–280,
-
[18]
Yaofeng Desmond Zhong, Biswadip Dey, and Amit Chakraborty
doi:10.1162/neco.1989.1.2.270. Yaofeng Desmond Zhong, Biswadip Dey, and Amit Chakraborty. Symplectic ode-net: Learning hamiltonian dynamics with control,
- [19]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.