Personalized Federated Learning by Energy-Efficient UAV Communications
Pith reviewed 2026-06-30 11:59 UTC · model grok-4.3
The pith
Separating a shared backbone from local heads and selecting only top-gradient devices lets UAVs deliver higher-accuracy federated learning with far lower energy use.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
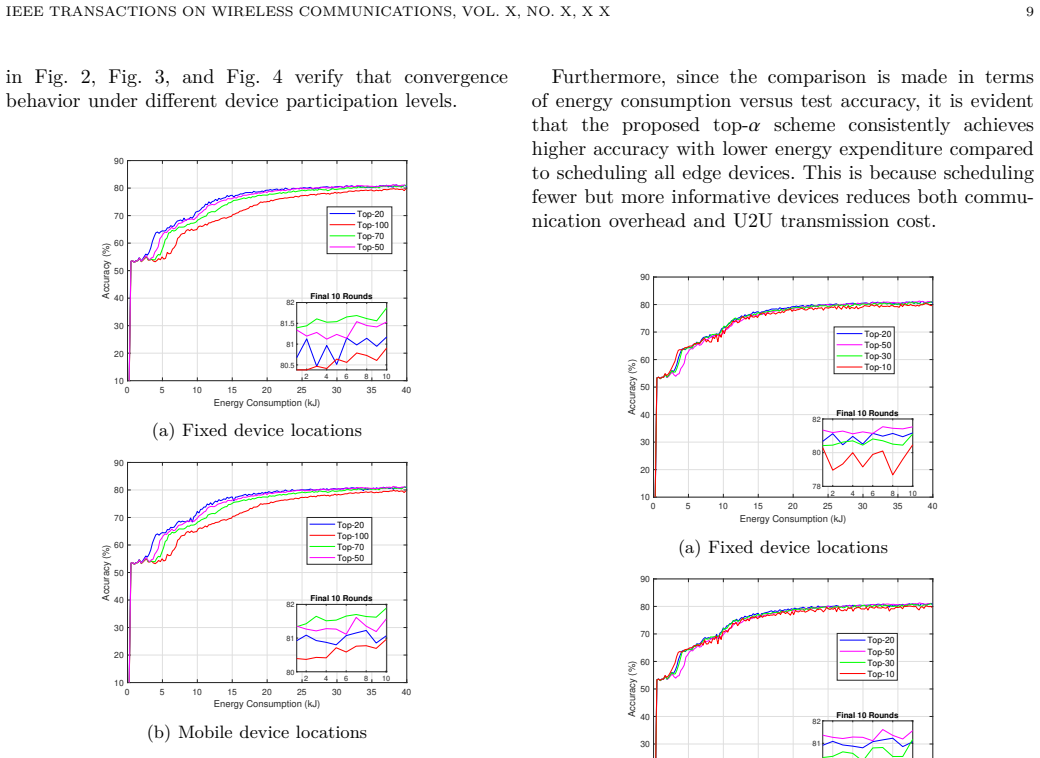
By enforcing a strict separation between a globally shared backbone and permanently local personalization heads, and by updating the backbone solely with the top-α fraction of devices ranked by gradient ℓ2-norm, the approach reduces the effect of data heterogeneity, focuses optimization on the most useful updates, and produces higher learning accuracy than state-of-the-art schemes while cutting UAV energy consumption.
What carries the argument
The strict separation of a globally shared backbone from device-specific personalization heads, together with gradient ℓ2-norm ranking that restricts backbone updates to the top-α devices.
If this is right
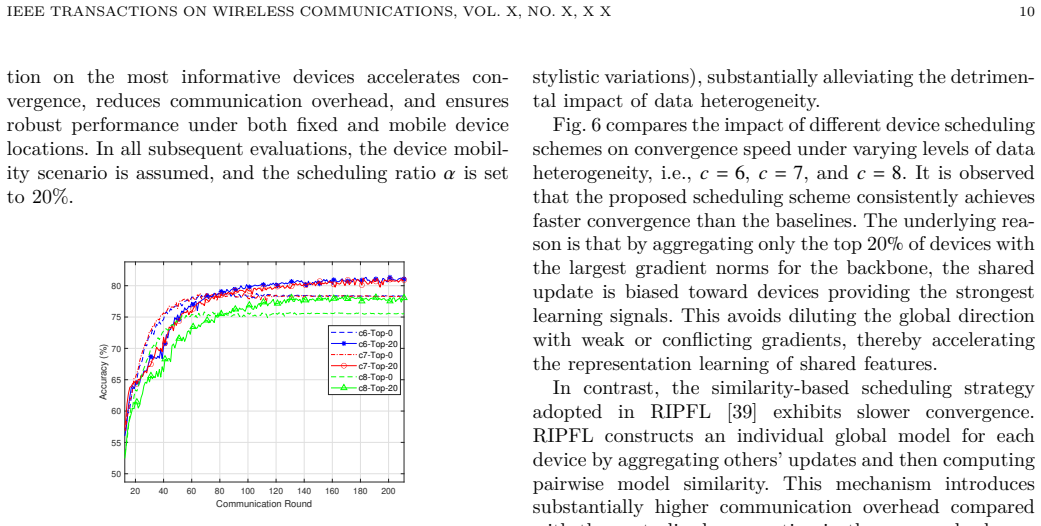
- Only the most informative device gradients reach the backbone, limiting the slowdown caused by data heterogeneity.
- UAV energy drops because communication occurs with far fewer devices per round.
- Final model accuracy exceeds that reported for earlier UAV-assisted or personalized federated learning baselines.
- The method works without requiring every device to transmit in every round.
Where Pith is reading between the lines
- The same backbone-head split and gradient ranking could be tested on other mobile relays such as ground vehicles or low-orbit satellites.
- Real-world flight tests that log actual battery drain under the proposed scheduler would show whether the simulated energy savings hold.
- The selection rule might need adjustment when device participation itself varies over time rather than remaining fixed.
Load-bearing premise
That selecting devices only by the size of their gradient vectors and letting only the largest ones update the shared backbone will keep long-term accuracy high on heterogeneous data while still lowering total energy.
What would settle it
A controlled simulation on highly heterogeneous data in which final test accuracy drops below the accuracy obtained when every device participates, or in which measured UAV energy fails to fall enough to justify any accuracy loss.
Figures






read the original abstract
Federated learning (FL) is an effective paradigm for enhancing the learning capability of edge devices while preserving data privacy. In geographically dispersed FL systems, such as sensor networks in remote areas, unmanned aerial vehicles (UAVs) can flexibly establish high-quality communication links to support parameter exchange. However, device heterogeneity and the limited battery capacity of UAVs pose significant challenges. Specifically, data heterogeneity slows convergence, while scheduling all devices for global collaboration incurs excessive communication and energy costs. To overcome these challenges, we adopt a strict separation between a globally shared backbone and permanently local personalization heads, thereby mitigating the impact of data heterogeneity. Furthermore, we propose a gradient-based scheduling strategy that jointly considers energy efficiency and learning performance. In each communication round, the backbone is updated only by the top-$\alpha$ devices ranked by gradient $\ell_{2}$-norm, ensuring that optimization focuses on the most informative updates. Simulation results demonstrate that the proposed scheme achieves higher learning accuracy than state-of-the-art approaches while significantly reducing UAV energy consumption.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a personalized federated learning framework for UAV-assisted systems that separates a shared backbone from local personalization heads to handle data heterogeneity, and introduces a gradient ℓ₂-norm based scheduling policy that selects only the top-α fraction of devices for backbone updates in each round. Simulation results are claimed to show superior learning accuracy compared to state-of-the-art methods alongside reduced UAV energy consumption.
Significance. If the simulation-based claims hold under rigorous controls for heterogeneity and long-term convergence, the work could offer a practical approach to balancing personalization, convergence speed, and energy efficiency in UAV-enabled FL deployments. The explicit separation of backbone and heads is a clear strength for mitigating non-IID effects, and the energy-aware scheduling is a relevant contribution for resource-constrained aerial platforms.
major comments (2)
- [Simulation Results] Simulation Results section: the central performance claims rest entirely on unspecified simulations; no details are provided on baselines, data heterogeneity levels (e.g., Dirichlet parameter or class imbalance), UAV channel models, number of independent runs, or statistical significance tests, so the evidence for higher accuracy and lower energy cannot be evaluated.
- [Gradient-based scheduling strategy] Gradient-based scheduling strategy (described in the abstract and method): ranking devices solely by ||∇||₂ and updating the backbone with only the top-α fraction lacks any analysis or ablation showing that this rule avoids selection bias on non-IID partitions; high-norm gradients may simply reflect local loss curvature or outlier statistics rather than representative information, risking drift of the shared backbone away from the full data distribution over long horizons.
minor comments (1)
- [Abstract] Abstract: the claim that the scheduling strategy 'jointly considers energy efficiency and learning performance' is not supported by the stated rule (ranking performed solely by gradient ℓ₂-norm); clarify whether energy enters the ranking criterion or is handled separately.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript to strengthen the presentation of results and analysis.
read point-by-point responses
-
Referee: [Simulation Results] Simulation Results section: the central performance claims rest entirely on unspecified simulations; no details are provided on baselines, data heterogeneity levels (e.g., Dirichlet parameter or class imbalance), UAV channel models, number of independent runs, or statistical significance tests, so the evidence for higher accuracy and lower energy cannot be evaluated.
Authors: We agree that the Simulation Results section requires substantially more detail for the claims to be properly evaluated. In the revised manuscript we will expand this section to specify: all baselines and their hyper-parameters, the exact data heterogeneity generation process (Dirichlet concentration parameter together with class-imbalance ratios), the UAV channel model (path-loss exponent, small-scale fading distribution, and noise variance), the number of independent Monte-Carlo runs (minimum of five) with reported means and standard deviations, and the statistical tests (paired t-tests or Wilcoxon signed-rank tests) used to support accuracy and energy-consumption differences. revision: yes
-
Referee: [Gradient-based scheduling strategy] Gradient-based scheduling strategy (described in the abstract and method): ranking devices solely by ||∇||₂ and updating the backbone with only the top-α fraction lacks any analysis or ablation showing that this rule avoids selection bias on non-IID partitions; high-norm gradients may simply reflect local loss curvature or outlier statistics rather than representative information, risking drift of the shared backbone away from the full data distribution over long horizons.
Authors: The manuscript states that the scheduler jointly accounts for energy efficiency and learning performance, yet the referee correctly notes the absence of any ablation or bias analysis. We will add (i) an ablation comparing gradient-norm selection against random and loss-value selection across multiple Dirichlet heterogeneity levels, (ii) long-horizon convergence plots that track backbone drift relative to the full population distribution, and (iii) a short discussion of the conditions under which high-norm gradients may be unrepresentative. These additions will be placed in a new subsection of the method and in the experimental evaluation. revision: yes
Circularity Check
No circularity: method is a proposed design choice validated by simulation, with no equations or self-referential reductions.
full rationale
The paper presents a separation of backbone and personalization heads plus a top-α gradient-norm scheduling rule as explicit design choices, not as quantities derived from prior fitted parameters or self-citations that reduce the claimed accuracy/energy gains back to the inputs by construction. No equations, uniqueness theorems, or ansatzes are invoked in the provided text; the central claims rest on empirical simulation comparisons rather than any mathematical chain that collapses to tautology. This is the normal case of an engineering proposal whose validity is external to its own definitions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning in the air: Secure federated learning for uav- assisted crowdsensing
Yuntao Wang, Zhou Su, Ning Zhang, and Abderrahim Bensli- mane. Learning in the air: Secure federated learning for uav- assisted crowdsensing. IEEE Transactions on Network Science and Engineering, 8(2):1055–1069, 2021. IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. X, NO. X, X X 15
2021
-
[2]
Privacy-preserving federated learning for uav-enabled networks: Learning-based joint scheduling and resource management
Helin Yang, Jun Zhao, Zehui Xiong, Kwok-Yan Lam, Sumei Sun, and Liang Xiao. Privacy-preserving federated learning for uav-enabled networks: Learning-based joint scheduling and resource management. IEEE Journal on Selected Areas in Communications, 39(10):3144–3159, 2021
2021
-
[3]
Energy-efficient federated learning over uav- enabled wireless powered communications
Quoc-Viet Pham, Mai Le, Thien Huynh-The, Zhu Han, and Won-Joo Hwang. Energy-efficient federated learning over uav- enabled wireless powered communications. IEEE Transactions on Vehicular Technology, 71(5):4977–4990, 2022
2022
-
[4]
Empowering edge intelligence by air-ground integrated federated learning
Yuben Qu, Chao Dong, Jianchao Zheng, Haipeng Dai, Fan Wu, Song Guo, and Alagan Anpalagan. Empowering edge intelligence by air-ground integrated federated learning. IEEE Network, 35(5):34–41, 2021
2021
-
[5]
Heterogeneous personalized federated learning by local-global updates mixing via convergence rate
Meirui Jiang, Anjie Le, Xiaoxiao Li, and Qi Dou. Heterogeneous personalized federated learning by local-global updates mixing via convergence rate. In The Twelfth International Conference on Learning Representations, 2024
2024
-
[6]
Federated Learning with Personalization Layers
Manoj Ghuhan Arivazhagan, Vinay Aggarwal, Aaditya Kumar Singh, and Sunav Choudhary. Federated learning with person- alization layers. arXiv preprint arXiv:1912.00818, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1912
-
[7]
Over-the-air federated learning in digital twins empowered uav swarms
Bingqing Jiang, Jun Du, Chunxiao Jiang, Zhu Han, Ahmed Alhammadi, and Merouane Debbah. Over-the-air federated learning in digital twins empowered uav swarms. IEEE Trans- actions on Wireless Communications, 2024
2024
-
[8]
Energy and gradient aware dynamic scheduling for v2v aided federated edge learning
Shiqian Guo and Bin-Jie Hu. Energy and gradient aware dynamic scheduling for v2v aided federated edge learning. IEEE Communications Letters, 28(2):323–327, 2023
2023
-
[9]
Energy-efficient federated learning through uav edge under location uncertainties
Chen Wang, Xiao Tang, Daosen Zhai, Ruonan Zhang, Nurzhan Ussipov, and Yan Zhang. Energy-efficient federated learning through uav edge under location uncertainties. IEEE Transac- tions on Network Science and Engineering, 2024
2024
-
[10]
Effective uav-aided asyn- chronous decentralized federated learning with distributed, adaptive and energy-aware gradient sparsification
Alia Asheralieva and Dusit Niyato. Effective uav-aided asyn- chronous decentralized federated learning with distributed, adaptive and energy-aware gradient sparsification. IEEE In- ternet of Things Journal, 2025
2025
-
[11]
Density-clustering aggregation for personalized federated learning with ai-enabled aerial and edge computing in uavs
Wei-Che Chien, Chih-Hsun Lin, Tianli Zhu, Cheng Dai, Sahil Garg, and Amrit Mukherjee. Density-clustering aggregation for personalized federated learning with ai-enabled aerial and edge computing in uavs. IEEE Internet of Things Journal, 2025
2025
-
[12]
Decentralized navigation with heterogeneous federated rein- forcement learning for uav-enabled mobile edge computing
Pengfei Wang, Hao Yang, Guangjie Han, Ruiyun Yu, Leyou Yang, Geng Sun, Heng Qi, Xiaopeng Wei, and Qiang Zhang. Decentralized navigation with heterogeneous federated rein- forcement learning for uav-enabled mobile edge computing. IEEE Transactions on Mobile Computing, 2024
2024
-
[13]
Integrated sensing, computation, and communication for uav-assisted federated edge learning
Yao Tang, Guangxu Zhu, Wei Xu, Man Hon Cheung, Tat-Ming Lok, and Shuguang Cui. Integrated sensing, computation, and communication for uav-assisted federated edge learning. IEEE Transactions on Wireless Communications, 2025
2025
-
[14]
Multi-uav hierarchical intelligent traffic offloading network optimization based on deep federated learning
Fengqi Li, Kaiyang Zhang, Jiaheng Wang, Yudong Li, Fengqiang Xu, Yanjuan Wang, and Ning Tong. Multi-uav hierarchical intelligent traffic offloading network optimization based on deep federated learning. IEEE Internet of Things Journal, 11(12):21312–21324, 2024
2024
-
[15]
Age of information minimization in uav-enabled iot net- works via federated reinforcement learning
Xuhui Zhang, Huijun Xing, Yanyan Shen, Jie Xu, and Shuguang Cui. Age of information minimization in uav-enabled iot net- works via federated reinforcement learning. IEEE Transactions on Wireless Communications, 2025
2025
-
[16]
Trajectory control and fair communications for multi-uav networks: A federated multi-agent deep reinforcement learning approach
Getaneh Berie Tarekegn, Belayneh Abebe Tesfaw, Rong-Terng Juang, Dola Saha, Robel Berie Tarekegn, Hsin-Piao Lin, and Li-Chia Tai. Trajectory control and fair communications for multi-uav networks: A federated multi-agent deep reinforcement learning approach. IEEE Transactions on Wireless Communi- cations, 2025
2025
-
[17]
Uav-assisted unbiased hierarchical federated learning: Performance and convergence analysis
Ruslan Zhagypar, Nour Kouzayha, Hesham ElSawy, Hayssam Dahrouj, and Tareq Y Al-Naffouri. Uav-assisted unbiased hierarchical federated learning: Performance and convergence analysis. IEEE Transactions on Machine Learning in Commu- nications and Networking, 2025
2025
-
[18]
The data value based asynchronous federated learning for uav swarm under unstable communication scenarios
Zhenhua Cui, Tao Yang, Xiaofeng Wu, Hui Feng, and Bo Hu. The data value based asynchronous federated learning for uav swarm under unstable communication scenarios. IEEE Transactions on Mobile Computing, 23(6):7165–7179, 2024
2024
-
[19]
Three-stage stackelberg game enabled clustered feder- ated learning in heterogeneous uav swarms
Wenji He, Haipeng Yao, Tianle Mai, Fu Wang, and Mohsen Guizani. Three-stage stackelberg game enabled clustered feder- ated learning in heterogeneous uav swarms. IEEE Transactions on Vehicular Technology, 72(7):9366–9380, 2023
2023
-
[20]
Multi-uav-assisted federated learning for energy-aware distributed edge training
Jianhang Tang, Jiangtian Nie, Yang Zhang, Zehui Xiong, Wen- chao Jiang, and Mohsen Guizani. Multi-uav-assisted federated learning for energy-aware distributed edge training. IEEE Transactions on Network and Service Management, 21(1):280– 294, 2024
2024
-
[21]
Zoheb Hassan, and Md
Mohammed Saif, Md. Zoheb Hassan, and Md. Jahangir Hossain. Decentralized aggregation for energy-efficient federated learn- ing in mmwave aerial-terrestrial integrated networks. IEEE Transactions on Machine Learning in Communications and Networking, 2:1283–1304, 2024
2024
-
[22]
Communication-efficient learning of deep networks from decentralized data
Brendan McMahan, Eider Moore, Daniel Ramage, Seth Hamp- son, and Blaise Aguera y Arcas. Communication-efficient learning of deep networks from decentralized data. In Artificial intelligence and statistics, pages 1273–1282. PMLR, 2017
2017
-
[23]
Towards personalized federated learning
Alysa Ziying Tan, Han Yu, Lizhen Cui, and Qiang Yang. Towards personalized federated learning. IEEE Transactions on Neural Networks and Learning Systems, 34(12):9587–9603, 2023
2023
-
[24]
Personalized federated learning with model-contrastive learning for multi- modal user modeling in human-centric metaverse
Xiaokang Zhou, Qiuyue Yang, Xuzhe Zheng, Wei Liang, Kevin I-Kai Wang, Jianhua Ma, Yi Pan, and Qun Jin. Personalized federated learning with model-contrastive learning for multi- modal user modeling in human-centric metaverse. IEEE Journal on Selected Areas in Communications, 42(4):817–831, 2024
2024
-
[25]
Shuai Wang, Yanqing Xu, Yanli Yuan, and Tony Q. S. Quek. Toward fast personalized semi-supervised federated learning in edge networks: Algorithm design and theoretical guarantee. IEEE Transactions on Wireless Communications, 23(2):1170– 1183, 2024
2024
-
[26]
Decentralized navigation with heterogeneous federated rein- forcement learning for uav-enabled mobile edge computing
Pengfei Wang, Hao Yang, Guangjie Han, Ruiyun Yu, Leyou Yang, Geng Sun, Heng Qi, Xiaopeng Wei, and Qiang Zhang. Decentralized navigation with heterogeneous federated rein- forcement learning for uav-enabled mobile edge computing. IEEE Transactions on Mobile Computing, 23(12):13621–13638, 2024
2024
-
[27]
Joint uav deployment and resource allocation: A personalized federated deep reinforcement learning approach
Xinyi Xu, Gang Feng, Shuang Qin, Yijing Liu, and Yao Sun. Joint uav deployment and resource allocation: A personalized federated deep reinforcement learning approach. IEEE Trans- actions on Vehicular Technology, 73(3):4005–4018, 2024
2024
-
[28]
Quantization-aware collaborative inference for large embodied ai models
Zhonghao Lyu, Ming Xiao, Mikael Skoglund, Merouane Debbah, and H Vincent Poor. Quantization-aware collaborative inference for large embodied ai models. arXiv preprint arXiv:2602.13052, 2026
-
[29]
Energy-efficient uav-assisted federated learning: Trajec- tory optimization, device scheduling, and resource management
Zhenyu Fu, Juan Liu, Yuyi Mao, Long Qu, Lingfu Xie, and Xijun Wang. Energy-efficient uav-assisted federated learning: Trajec- tory optimization, device scheduling, and resource management. IEEE Transactions on Network and Service Management, 2025
2025
-
[30]
Joint uav deployment and edge association for energy-efficient federated learning
Tao Wu, Maomao Li, Yuben Qu, Hongjun Wang, Zhenhua Wei, and Jiannong Cao. Joint uav deployment and edge association for energy-efficient federated learning. IEEE Transactions on Cognitive Communications and Networking, 2025
2025
-
[31]
Energy efficient and low latency federated distillation over uav-assisted wireless networks
Zhe Zhang, Yanchao Zhao, Chuyi Chen, Kun Zhu, and Dusit Niyato. Energy efficient and low latency federated distillation over uav-assisted wireless networks. IEEE Transactions on Wireless Communications, 2025
2025
-
[32]
Energy- efficient distributed learning for noma-based unmanned aerial agent-assisted mec networks
Prakhar Consul, Ishan Budhiraja, Deepak Garg, Neeraj Kumar, Joel JPC Rodrigues, and Abdullah Almuhaideb. Energy- efficient distributed learning for noma-based unmanned aerial agent-assisted mec networks. IEEE Internet of Things Journal, 2025
2025
-
[33]
Distributed optimization of resource- efficiency for federated edge intelligence in uav-enabled iot networks
Yingyu Li, Jiangying Rao, Lian Wang, Yong Xiao, Xiaohu Ge, and Guangming Shi. Distributed optimization of resource- efficiency for federated edge intelligence in uav-enabled iot networks. IEEE Internet of Things Journal, 2025
2025
-
[34]
Joint communication and computing resource allocation for energy efficient hierarchical federated learning in marine internet of things
Wei Jiang, Zhongjie Xiao, Li Ping Qian, Shuang Qin, Gang Feng, and Yuan Wu. Joint communication and computing resource allocation for energy efficient hierarchical federated learning in marine internet of things. IEEE Transactions on Network Science and Engineering, 2025
2025
-
[35]
Energy minimization for wireless communication with rotary-wing uav
Yong Zeng, Jie Xu, and Rui Zhang. Energy minimization for wireless communication with rotary-wing uav. IEEE Transac- tions on Wireless Communications, 18(4):2329–2345, 2019
2019
-
[36]
Cellular uav-to-x communications: Design and optimization for multi-uav networks
Shuhang Zhang, Hongliang Zhang, Boya Di, and Lingyang Song. Cellular uav-to-x communications: Design and optimization for multi-uav networks. IEEE Transactions on Wireless Communi- cations, 18(2):1346–1359, 2019
2019
-
[37]
Mobile unmanned aerial vehicles (uavs) IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL
Mohammad Mozaffari, Walid Saad, Mehdi Bennis, and Mérouane Debbah. Mobile unmanned aerial vehicles (uavs) IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. X, NO. X, X X 16 for energy-efficient internet of things communications. IEEE Transactions on Wireless Communications, 16(11):7574–7589, 2017
2017
-
[38]
Learning multiple layers of features from tiny images
Alex Krizhevsky, Geoffrey Hinton, et al. Learning multiple layers of features from tiny images. Toronto, ON, Canada, 2009
2009
-
[39]
Reliable and interpretable personalized federated learning
Zixuan Qin, Liu Yang, Qilong Wang, Yahong Han, and Qinghua Hu. Reliable and interpretable personalized federated learning. In 2023 IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR), pages 20422–20431, 2023
2023
-
[40]
Intelligent uav deployment for a disaster-resilient wireless network
Hassaan Hydher, Dushantha Nalin K Jayakody, Kasun T Hemachandra, and Tharaka Samarasinghe. Intelligent uav deployment for a disaster-resilient wireless network. Sensors, 20(21):6140, 2020
2020
-
[41]
Linear convergence of gradient and proximal-gradient methods under the polyak-łojasiewicz condition
Hamed Karimi, Julie Nutini, and Mark Schmidt. Linear convergence of gradient and proximal-gradient methods under the polyak-łojasiewicz condition. In Joint European conference on machine learning and knowledge discovery in databases, pages 795–811. Springer, 2016. Shiqian Guo received the Ph.D. degree in information and communication engineering from Sout...
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.