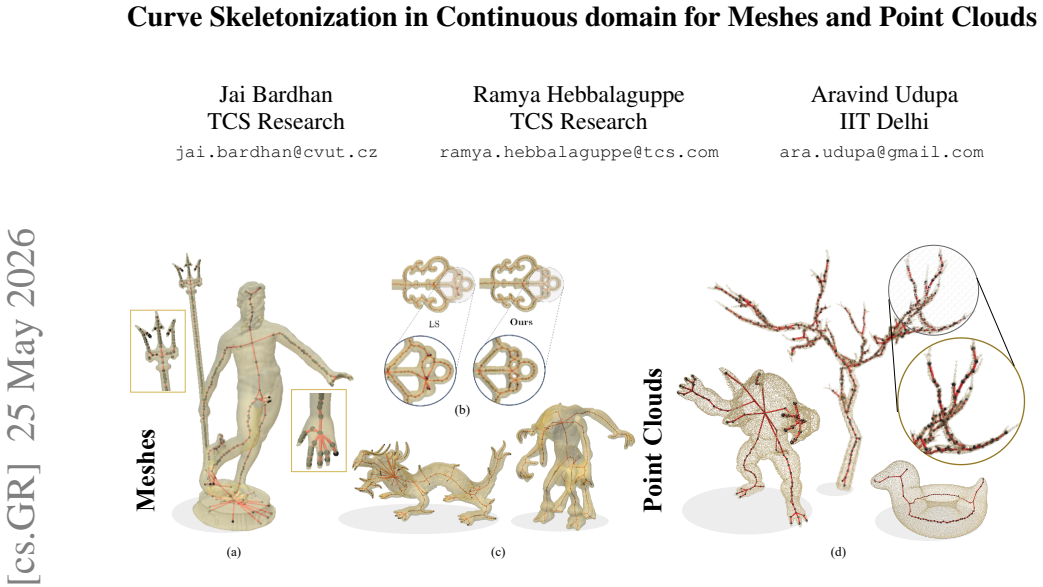
Curve Skeletonization in Continuous domain for Meshes and Point Clouds
Pith reviewed 2026-06-29 19:21 UTC · model grok-4.3
The pith
CSCD generalizes discrete local separators to continuous manifolds for curve skeletonization on meshes and point clouds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
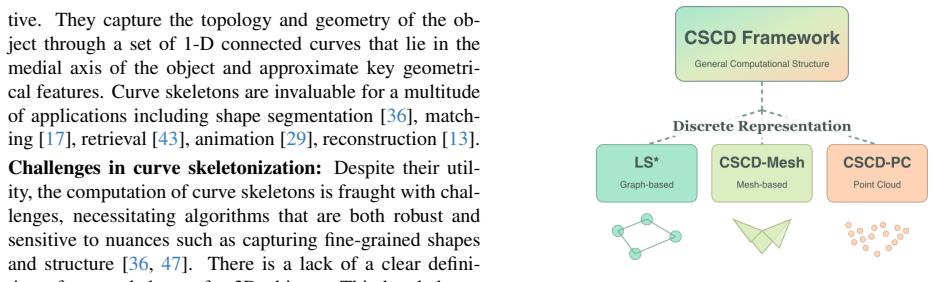
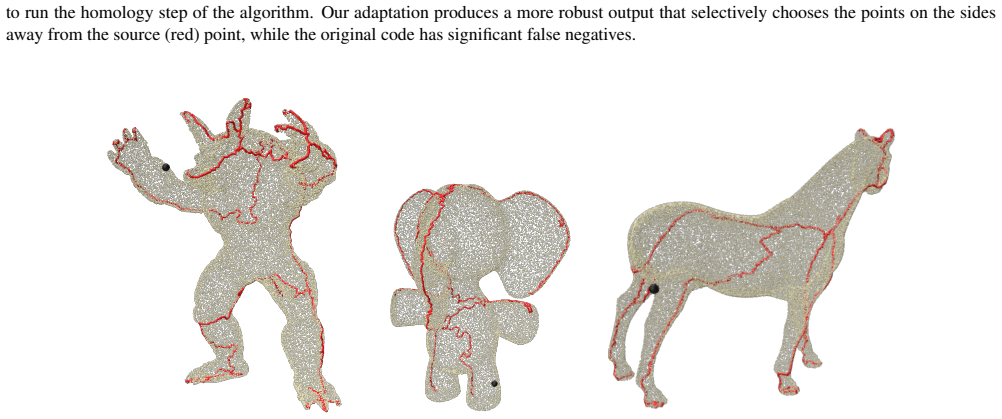
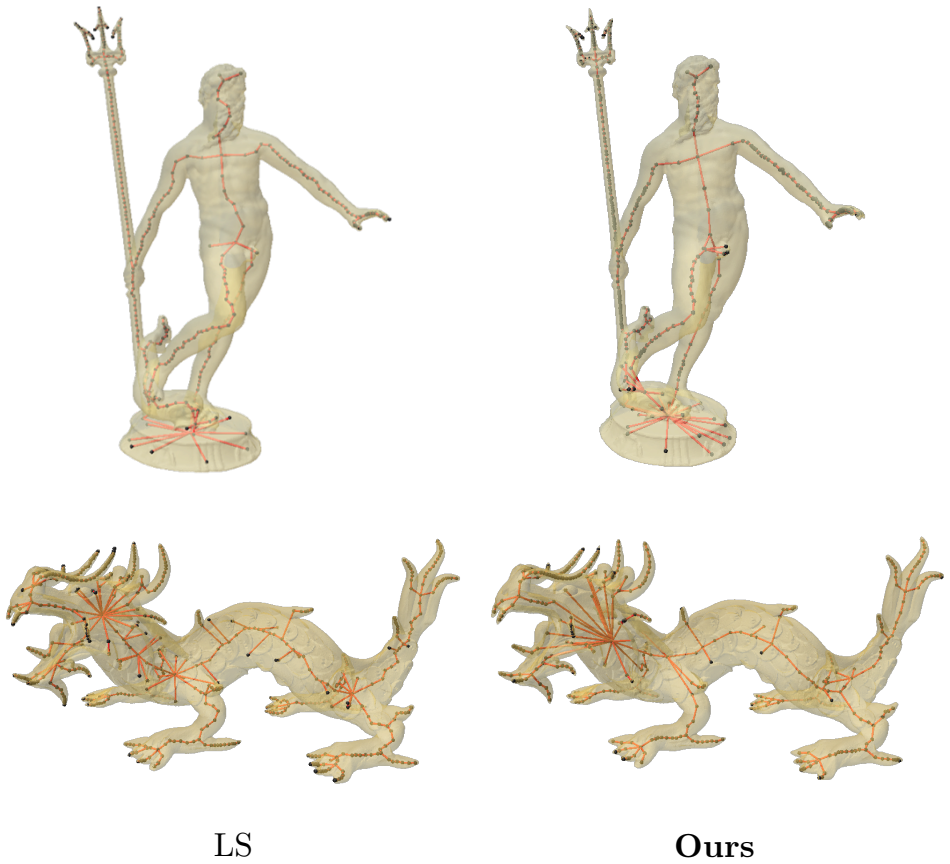
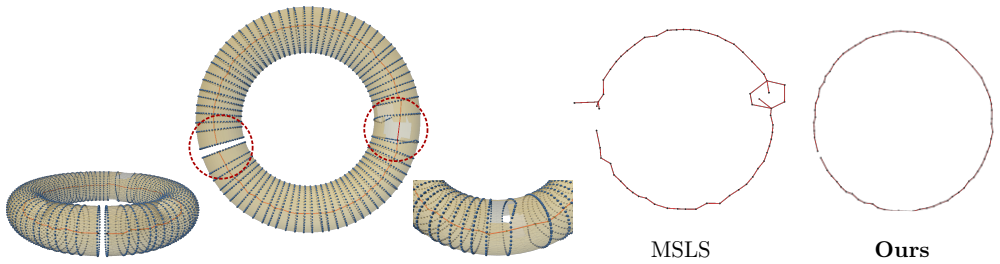
CSCD is a framework that generalizes Skeletonization via Local Separators to the continuous domain on manifolds. CSCD-M achieves this for meshes by leveraging intrinsic triangulation to gain resilience to noise and improved topological preservation. CSCD-PC applies the same idea to point clouds through tufted Laplacians. The resulting method matches LS across varied meshes, outperforms LS on Thingi10k, and produces qualitatively superior skeletons for point clouds compared with CoverageAxis++ and EPCS.
What carries the argument
The CSCD framework that generalizes the discrete local separators approach to continuous manifolds via intrinsic triangulation for meshes and tufted Laplacians for point clouds.
If this is right
- CSCD-M matches or exceeds LS performance on standard mesh benchmarks and on Thingi10k.
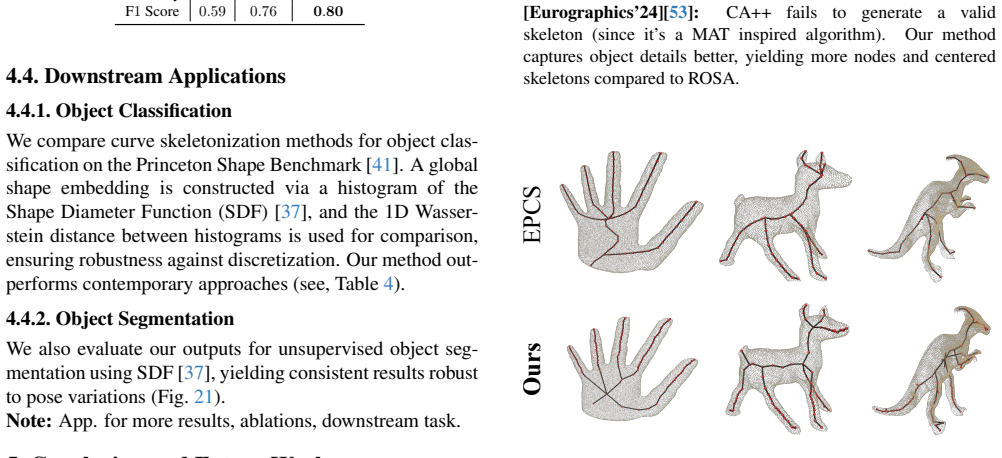
- CSCD-PC produces qualitatively better curve skeletons from point clouds than CoverageAxis++ or EPCS.
- The extracted skeletons improve accuracy in downstream tasks such as object classification, shape segmentation, and identification of handles, tunnels, and constrictions.
- The continuous formulation reduces discretization errors while retaining the computational advantages of the original local-separators method.
Where Pith is reading between the lines
- The same lifting strategy could be applied to other discrete graph algorithms in geometry processing to reduce discretization artifacts.
- Direct operation on manifold data may enable skeletonization pipelines that avoid an intermediate meshing step for raw scans.
- Improved topological fidelity on noisy inputs could benefit applications that rely on consistent medial-axis or curve representations across varying sampling densities.
Load-bearing premise
Intrinsic triangulation and tufted Laplacians successfully extend the local separators property to continuous representations while preserving its efficiency and topological guarantees.
What would settle it
A mesh or point cloud where CSCD-M or CSCD-PC produces a skeleton with incorrect topology or connectivity that LS or the compared methods do not produce would falsify the claim of improved preservation without new inaccuracies.
Figures

read the original abstract
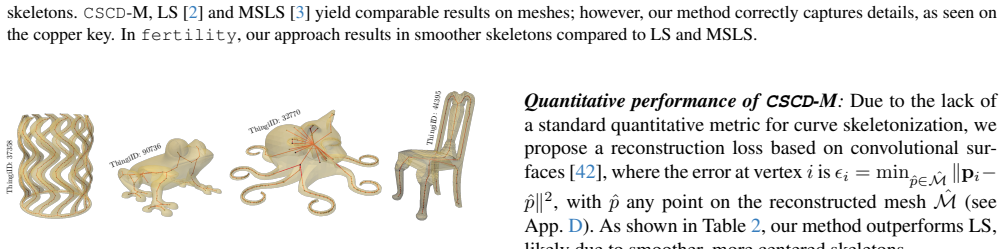
Advancements in 3D curve skeletonization are accelerating progress across a wide range of applications. However, developing robust skeletonization algorithms that capture intricate object details remains challenging. Skeletonization via Local Separators (LS) offers an efficient graph-based approach but suffers from representation inaccuracies due to its discrete nature. To address this, we introduce CSCD, a novel framework for Curve Skeletonization in the Continuous Domain, generalizing LS to manifolds. Specifically, we present two realizations: CSCD-M for meshes and CSCD-PC for point clouds. CSCD-M leverages the intrinsic triangulation of a mesh for resilience to noise and improved topological preservation, while CSCD-PC employs tufted Laplacians for enhanced robustness. To our knowledge, CSCD-M is the first intrinsic method for curve skeletonization. Our results show CSCD-M matches LS performance across diverse meshes and outperforms LS (TOG'21) on benchmarks like Thingi10k dataset. CSCD-PC qualitatively outperforms CoverageAxis++ (Eurographics'24) and EPCS (CAG'23). Finally, we demonstrate the efficacy of CSCD in a few downstream tasks: object classification, shape segmentation, identifying handles, tunnels, and constrictions in objects. Project Website: https://cscd-skel.pages.dev
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces CSCD, a framework for curve skeletonization in the continuous domain that generalizes the discrete Local Separators (LS) approach. CSCD-M realizes this for meshes via intrinsic triangulation, claimed to be the first intrinsic method, while CSCD-PC uses tufted Laplacians for point clouds. The authors state that CSCD-M matches LS performance across diverse meshes and outperforms LS on Thingi10k, CSCD-PC qualitatively outperforms CoverageAxis++ and EPCS, and both support downstream tasks including classification, segmentation, and detection of handles/tunnels/constrictions.
Significance. If the central generalization holds, the work supplies a continuous-domain extension of LS that preserves topological guarantees and efficiency while adding noise resilience through intrinsic triangulation and tufted Laplacians. The derivations appear parameter-free and internally consistent, with experiments supporting the efficiency and topological claims. This could strengthen skeletonization tools for noisy or manifold-based 3D data in graphics applications.
minor comments (2)
- Abstract: the outperformance claim on Thingi10k would be clearer if a parenthetical reference to the specific quantitative metric (e.g., Hausdorff distance or coverage score) were added, even though the full results section presumably contains the supporting data.
- §3 (method): the transition from discrete local separators to the continuous intrinsic operator could include one additional sentence contrasting the two formulations for readers unfamiliar with intrinsic triangulations.
Simulated Author's Rebuttal
We thank the referee for the positive review and the recommendation of minor revision. We are pleased that the significance of the continuous-domain generalization of Local Separators, along with the topological and efficiency claims, is recognized.
Circularity Check
No significant circularity
full rationale
The paper generalizes the prior discrete Local Separators (LS) construction to continuous domain via intrinsic triangulation (CSCD-M) and tufted Laplacians (CSCD-PC). No step reduces a claimed prediction or first-principles result to its own inputs by definition, fitted parameter, or self-citation chain. The topological guarantees and performance claims rest on the new continuous realizations and experiments rather than renaming or smuggling prior ansatzes. The derivation chain is self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Skeleton extraction by mesh contraction.ACM Trans
Oscar Kin-Chung Au, Chiew-Lan Tai, Hung-Kuo Chu, Daniel Cohen-Or, and Tong-Yee Lee. Skeleton extraction by mesh contraction.ACM Trans. Graph., 27(3):1–10, 2008. 2, 20
2008
-
[2]
Skeletonization via local separators.ACM Trans
Andreas Bærentzen and Eva Rotenberg. Skeletonization via local separators.ACM Trans. Graph., 40(5), 2021. 1, 2, 5, 6, 7, 8, 10, 20
2021
-
[3]
Andreas Bærentzen, Rasmus Emil Christensen, Emil Toftegaard Gæde, and Eva Rotenberg
J. Andreas Bærentzen, Rasmus Emil Christensen, Emil Toftegaard Gæde, and Eva Rotenberg. Multilevel skele- tonization using local separators. InProceedings of the 39th International Symposium on Computational Geometry (SoCG 2023), 2023. 2, 6, 7, 8, 5, 10, 20
2023
-
[4]
A robust algorithm for voxel-to-polygon mesh phantom con- version.Brain and Human Body Modeling: Computational Human Modeling at EMBC 2018, pages 317–327, 2019
Justin L Brown, Takuya Furuta, and Wesley E Bolch. A robust algorithm for voxel-to-polygon mesh phantom con- version.Brain and Human Body Modeling: Computational Human Modeling at EMBC 2018, pages 317–327, 2019. 20
2018
-
[5]
Skeletonization via dual of shape segmentation.Computer Aided Geometric Design, 80:101856, 2020
Jingliang Cheng, Xinyu Zheng, Shuangmin Chen, Guozhu Liu, Shiqing Xin, Lin Lu, Yuanfeng Zhou, and Changhe Tu. Skeletonization via dual of shape segmentation.Computer Aided Geometric Design, 80:101856, 2020. 2, 20
2020
-
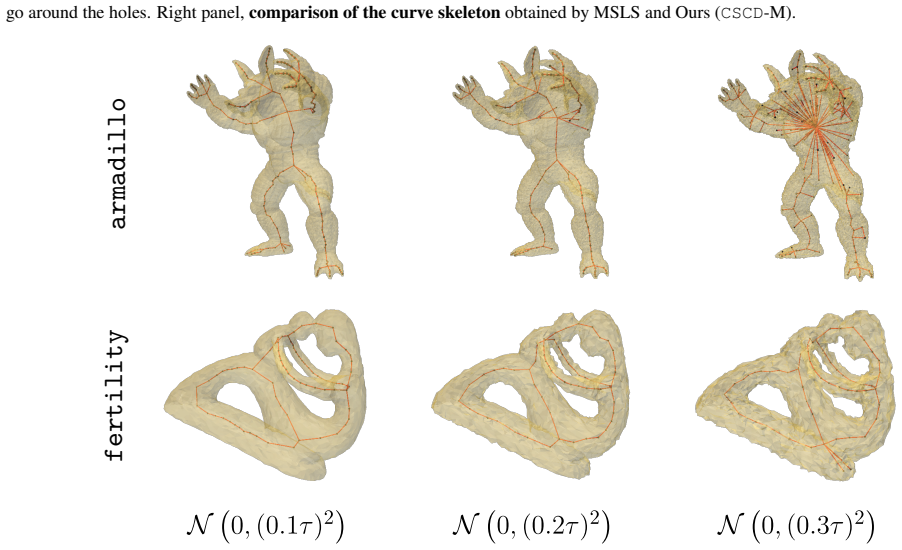
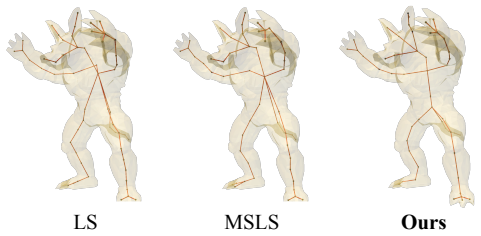
[6]
Y . Chu, W. Wang, and L. Li. Robustly extracting concise 3d curve skeletons by enhancing the capture of prominent features.IEEE Trans Vis Comput Graph, 29(8):3472–3488,
-
[7]
Epub 2023 Jun 29, PMID: 35324442. 2
2023
-
[8]
A simple discrete calculus for digital surfaces
David Coeurjolly and Jacques-Olivier Lachaud. A simple discrete calculus for digital surfaces. InDiscrete Geome- try and Mathematical Morphology, pages 341–353, Cham,
-
[9]
Springer International Publishing. 12
-
[10]
Curve- skeleton applications
Nicu D Cornea, Deborah Silver, and Patrick Min. Curve- skeleton applications. InVIS 05. IEEE Visualization, 2005., pages 95–102. IEEE, 2005. 2, 20
2005
-
[11]
The heat method for distance computation.Commun
Keenan Crane, Clarisse Weischedel, and Max Wardetzky. The heat method for distance computation.Commun. ACM, 60(11):90–99, 2017. 4, 2, 19
2017
-
[12]
A survey of algorithms for geodesic paths and distances
Keenan Crane, Marco Livesu, Enrico Puppo, and Yipeng Qin. A survey of algorithms for geodesic paths and distances. ArXiv, abs/2007.10430, 2020. 19
-
[13]
Coverage axis: In- ner point selection for 3d shape skeletonization.Computer Graphics Forum, 41(2):419–432, 2022
Zhiyang Dou, Cheng Lin, Rui Xu, Lei Yang, Shiqing Xin, Taku Komura, and Wenping Wang. Coverage axis: In- ner point selection for 3d shape skeletonization.Computer Graphics Forum, 41(2):419–432, 2022. 2, 20
2022
-
[14]
Coverage axis: In- ner point selection for 3d shape skeletonization
Zhiyang Dou, Cheng Lin, Rui Xu, Lei Yang, Shiqing Xin, Taku Komura, and Wenping Wang. Coverage axis: In- ner point selection for 3d shape skeletonization. InCom- puter Graphics Forum, pages 419–432. Wiley Online Li- brary, 2022. 2, 20
2022
-
[15]
Towards skeleton based recon- struction: From projective skeletonization to canal surface estimation
Bastein Durix, G ´eraldine Morin, Sylvie Chambon, C ´eline Roudet, and Lionel Garnier. Towards skeleton based recon- struction: From projective skeletonization to canal surface estimation. In2015 International Conference on 3D Vision, pages 545–553, 2015. 2
2015
-
[16]
Shachar Fleishman, Daniel Cohen-Or, and Cl ´audio T. Silva. Robust moving least-squares fitting with sharp features. ACM SIGGRAPH 2005 Papers, 2005. 4
2005
-
[17]
NeRF: Neural Radiance Field in 3D Vision: A Comprehensive Review (Updated Post-Gaussian Splatting)
Kyle Gao, Yina Gao, Hongjie He, Dening Lu, Linlin Xu, and Jonathan Li. Nerf: Neural radiance field in 3d vision, a comprehensive review.arXiv preprint arXiv:2210.00379,
work page internal anchor Pith review Pith/arXiv arXiv
-
[18]
Integer coordinates for intrinsic geometry processing.arXiv preprint arXiv:2106.00220, 2021
Mark Gillespie, Nicholas Sharp, and Keenan Crane. Integer coordinates for intrinsic geometry processing.arXiv preprint arXiv:2106.00220, 2021. 7
-
[19]
Strategies for shape matching using skele- tons.Computer Vision and Image Understanding, 110(3): 326–345, 2008
Wooi-Boon Goh. Strategies for shape matching using skele- tons.Computer Vision and Image Understanding, 110(3): 326–345, 2008. Similarity Matching in Computer Vision and Multimedia. 2
2008
-
[20]
L1-medial skeleton of point cloud.ACM Trans
Hui Huang, Shihao Wu, Daniel Cohen-Or, Minglun Gong, Hao Zhang, Guiqing Li, and Baoquan Chen. L1-medial skeleton of point cloud.ACM Trans. Graph., 32(4), 2013. 2, 20
2013
-
[21]
libigl: A simple C++ geometry processing library, 2018
Alec Jacobson, Daniele Panozzo, et al. libigl: A simple C++ geometry processing library, 2018. https://libigl.github.io/. 2
2018
-
[22]
Jones, J.A
M.W. Jones, J.A. Baerentzen, and M. Sramek. 3d dis- tance fields: a survey of techniques and applications.IEEE Transactions on Visualization and Computer Graphics, 12 (4):581–599, 2006. 1
2006
-
[23]
Computing geodesic paths on manifolds.Proceedings of the national academy of Sciences, 95(15):8431–8435, 1998
Ron Kimmel and James A Sethian. Computing geodesic paths on manifolds.Proceedings of the national academy of Sciences, 95(15):8431–8435, 1998. 2
1998
-
[24]
New Greedy Heuristics For Set Cover and Set Packing
David Kordalewski. New greedy heuristics for set cover and set packing.ArXiv, abs/1305.3584, 2013. 4
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[25]
Epcs: Endpoint-based part-aware curve skeleton extraction for low-quality point clouds.Com- puters & Graphics, 117:209–221, 2023
Chunhui Li, Mingquan Zhou, Guohua Geng, Yifei Xie, Yuhe Zhang, and Yangyang Liu. Epcs: Endpoint-based part-aware curve skeleton extraction for low-quality point clouds.Com- puters & Graphics, 117:209–221, 2023. 2, 8, 20
2023
-
[26]
Q-mat: Computing medial axis trans- form by quadratic error minimization.ACM Transactions on Graphics (TOG), 35(1):1–16, 2015
Pan Li, Bin Wang, Feng Sun, Xiaohu Guo, Caiming Zhang, and Wenping Wang. Q-mat: Computing medial axis trans- form by quadratic error minimization.ACM Transactions on Graphics (TOG), 35(1):1–16, 2015. 2
2015
-
[27]
Point2skeleton: Learning skeletal representations from point clouds.2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 4275–4284, 2020
Chu-Hsing Lin, Changjian Li, Yuan Liu, Nenglun Chen, Yi- King Choi, and Wenping Wang. Point2skeleton: Learning skeletal representations from point clouds.2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 4275–4284, 2020. 2, 20
2021
-
[28]
An optimization-driven approach for computing geodesic paths on triangle meshes.Computer- Aided Design, 90:105–112, 2017
Bangquan Liu, Shuangmin Chen, Shi-Qing Xin, Ying He, Zhen Liu, and Jieyu Zhao. An optimization-driven approach for computing geodesic paths on triangle meshes.Computer- Aided Design, 90:105–112, 2017. SI:SPM2017. 20
2017
-
[29]
Re- constructing the curve-skeletons of 3d shapes using the vi- sual hull.IEEE Transactions on Visualization and Computer Graphics, 18:1891–1901, 2012
Marco Livesu, Fabio Guggeri, and Riccardo Scateni. Re- constructing the curve-skeletons of 3d shapes using the vi- sual hull.IEEE Transactions on Visualization and Computer Graphics, 18:1891–1901, 2012. 2, 20
1901
-
[30]
V oxel structure- based mesh reconstruction from a 3d point cloud.IEEE Transactions on Multimedia, 24:1815–1829, 2022
Chenlei Lv, Weisi Lin, and Baoquan Zhao. V oxel structure- based mesh reconstruction from a 3d point cloud.IEEE Transactions on Multimedia, 24:1815–1829, 2022. 20
2022
-
[31]
Transfer4d: A framework for frugal motion capture and deformation transfer
Shubh Maheshwari, Rahul Narain, and Ramya Hebbal- aguppe. Transfer4d: A framework for frugal motion capture and deformation transfer. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 12836–12846, 2023. 2
2023
-
[32]
Mancinelli, M
C. Mancinelli, M. Livesu, and E. Puppo. Practical computa- tion of the cut locus on discrete surfaces.Computer Graphics Forum, 40(5):261–273, 2021. 4, 6, 2, 5 9
2021
-
[33]
Carvalho
Dimas Mart ´ınez, Luiz Velho, and Paulo C. Carvalho. Com- puting geodesics on triangular meshes.Computers and Graphics, 29(5):667–675, 2005. 20
2005
-
[34]
Srinivasan, Matthew Tancik, Jonathan T
Ben Mildenhall, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view syn- thesis.Commun. ACM, 65:99–106, 2020. 1
2020
-
[35]
Curve-skeleton properties, applications and algorithms.IEEE Transactions on Visual- ization and Computer Graphics, 13(3):530–548, 2007
D Nicu, C Silver, and D Silver. Curve-skeleton properties, applications and algorithms.IEEE Transactions on Visual- ization and Computer Graphics, 13(3):530–548, 2007. 2, 20
2007
-
[36]
Pedregosa, G
F. Pedregosa, G. Varoquaux, A. Gramfort, V . Michel, B. Thirion, O. Grisel, M. Blondel, P. Prettenhofer, R. Weiss, V . Dubourg, J. Vanderplas, A. Passos, D. Cournapeau, M. Brucher, M. Perrot, and E. Duchesnay. Scikit-learn: Machine learning in Python.Journal of Machine Learning Research, 12:2825–2830, 2011. 2
2011
-
[37]
Dennie Reniers, Jarke van Wijk, and Alexandru Telea. Com- puting multiscale curve and surface skeletons of genus 0 shapes using a global importance measure.IEEE Transac- tions on Visualization and Computer Graphics, 14(2):355– 368, 2008. 2, 20
2008
-
[38]
Saha, Gunilla Borgefors, and Gabriella Sanniti di Baja
Punam K. Saha, Gunilla Borgefors, and Gabriella Sanniti di Baja. A survey on skeletonization algorithms and their appli- cations.Pattern Recognition Letters, 76:3–12, 2016. Special Issue on Skeletonization and its Application. 2, 20
2016
-
[39]
Consis- tent mesh partitioning and skeletonisation using the shape diameter function.The Visual Computer, 24:249–259, 2008
Lior Shapira, Ariel Shamir, and Daniel Cohen-Or. Consis- tent mesh partitioning and skeletonisation using the shape diameter function.The Visual Computer, 24:249–259, 2008. 8
2008
-
[40]
A laplacian for nonman- ifold triangle meshes.Computer Graphics Forum, 39(5):69– 80, 2020
Nicholas Sharp and Keenan Crane. A laplacian for nonman- ifold triangle meshes.Computer Graphics Forum, 39(5):69– 80, 2020. 12
2020
-
[41]
You can find geodesic paths in triangle meshes by just flipping edges.ACM Trans
Nicholas Sharp and Keenan Crane. You can find geodesic paths in triangle meshes by just flipping edges.ACM Trans. Graph., 39(6), 2020. 5, 2, 4, 20
2020
-
[42]
Geometrycentral: A modern c++ library of data structures and algorithms for ge- ometry processing.github, 2019
Nicholas Sharp, Keenan Crane, et al. Geometrycentral: A modern c++ library of data structures and algorithms for ge- ometry processing.github, 2019. 2
2019
-
[43]
The princeton shape benchmark
Philip Shilane, Patrick Min, Michael Kazhdan, and Thomas Funkhouser. The princeton shape benchmark. InProceed- ings Shape Modeling Applications, 2004., pages 167–178. IEEE, 2004. 8
2004
-
[44]
PhD thesis, CO- MUE Universit´e Cˆote d’Azur (2015-2019), 2019
Alvaro Javier Fuentes Suarez.Modeling shapes with skele- tons: scaffolds & anisotropic convolution. PhD thesis, CO- MUE Universit´e Cˆote d’Azur (2015-2019), 2019. 7, 3
2015
-
[45]
Sundar, D
H. Sundar, D. Silver, N. Gagvani, and S. Dickinson. Skeleton based shape matching and retrieval. In2003 Shape Modeling International., pages 130–139, 2003. 2
2003
-
[46]
Fast exact and approx- imate geodesics on meshes.ACM transactions on graphics (TOG), 24(3):553–560, 2005
Vitaly Surazhsky, Tatiana Surazhsky, Danil Kirsanov, Steven J Gortler, and Hugues Hoppe. Fast exact and approx- imate geodesics on meshes.ACM transactions on graphics (TOG), 24(3):553–560, 2005. 2
2005
-
[47]
Curve skeleton extraction from incomplete point cloud.ACM Trans
Andrea Tagliasacchi, Hao Zhang, and Daniel Cohen-Or. Curve skeleton extraction from incomplete point cloud.ACM Trans. Graph., 28(3), 2009. 2, 6, 7, 8, 10, 13, 20
2009
-
[48]
Mean curvature skeletons.Computer Graphics Forum, 31(5):1735–1744, 2012
Andrea Tagliasacchi, Ibraheem Alhashim, Matt Olson, and Hao Zhang. Mean curvature skeletons.Computer Graphics Forum, 31(5):1735–1744, 2012. 2, 6, 7, 5, 20
2012
-
[49]
3d skeletons: A state-of- the-art report.Computer Graphics Forum, 35(2):573–597,
Andrea Tagliasacchi, Thomas Delame, Michela Spagnuolo, Nina Amenta, and Alexandru Telea. 3d skeletons: A state-of- the-art report.Computer Graphics Forum, 35(2):573–597,
-
[50]
G. Taubin. Geometric Signal Processing on Polygonal Meshes. InEurographics 2000 - STARs. Eurographics As- sociation, 2000. 1
2000
-
[51]
3D Mesh Skeleton Extraction Using Topologi- cal and Geometrical Analyses
Julien Tierny, Jean-Philippe Vandeborre, and Mohamed Daoudi. 3D Mesh Skeleton Extraction Using Topologi- cal and Geometrical Analyses. In14th Pacific Conference on Computer Graphics and Applications (Pacific Graphics 2006), page s1poster, Tapei, Taiwan, 2006. 2, 20
2006
-
[52]
S. R. S. Varadhan. On the behavior of the fundamental solu- tion of the heat equation with variable coefficients.Commu- nications on Pure and Applied Mathematics, 20(2):431–455,
-
[53]
A survey of deep learning- based mesh processing.Communications in Mathematics and Statistics, 10, 2022
He Wang and Juyong Zhang. A survey of deep learning- based mesh processing.Communications in Mathematics and Statistics, 10, 2022. 1
2022
-
[54]
Computing medial axis transform with feature preservation via restricted power diagram.ACM Transactions on Graph- ics (TOG), 41(6):1–18, 2022
Ningna Wang, Bin Wang, Wenping Wang, and Xiaohu Guo. Computing medial axis transform with feature preservation via restricted power diagram.ACM Transactions on Graph- ics (TOG), 41(6):1–18, 2022. 2
2022
-
[55]
Coverage axis++: Efficient inner point selection for 3d shape skeletonization
Zimeng Wang, Zhiyang Dou, Rui Xu, Cheng Lin, Yuan Liu, Xiaoxiao Long, Shiqing Xin, Taku Komura, Xiaoming Yuan, and Wenping Wang. Coverage axis++: Efficient inner point selection for 3d shape skeletonization. InComputer Graph- ics Forum, page e15143. Wiley Online Library, 2024. 2, 8, 20
2024
-
[56]
V oxel2mesh: 3d mesh model genera- tion from volumetric data
Udaranga Wickramasinghe, Edoardo Remelli, Graham Knott, and Pascal Fua. V oxel2mesh: 3d mesh model genera- tion from volumetric data. InMedical Image Computing and Computer Assisted Intervention–MICCAI 2020: 23rd Inter- national Conference, Lima, Peru, October 4–8, 2020, Pro- ceedings, Part IV 23, pages 299–308. Springer, 2020. 20
2020
-
[57]
Efficiently determining a locally exact shortest path on polyhedral surfaces.Computer- Aided Design, 39(12):1081–1090, 2007
Shi-Qing Xin and Guo-Jin Wang. Efficiently determining a locally exact shortest path on polyhedral surfaces.Computer- Aided Design, 39(12):1081–1090, 2007. 20
2007
-
[58]
Efficiently com- puting exact geodesic loops within finite steps.IEEE Trans- actions on Visualization and Computer Graphics, 18(6): 879–889, 2012
Shi-Qing Xin, Ying He, and Chi-Wing Fu. Efficiently com- puting exact geodesic loops within finite steps.IEEE Trans- actions on Visualization and Computer Graphics, 18(6): 879–889, 2012. 20
2012
-
[59]
P2mat-net: Learning medial axis transform from sparse point clouds.Computer Aided Geometric Design, 80: 101874, 2020
Baorong Yang, Junfeng Yao, Bin Wang, Jianwei Hu, Yil- ing Pan, Tianxiang Pan, Wenping Wang, and Xiaohu Guo. P2mat-net: Learning medial axis transform from sparse point clouds.Computer Aided Geometric Design, 80: 101874, 2020. 2, 20
2020
-
[60]
De-path: A differential-evolution-based method for computing energy-minimizing paths on surfaces.Computer- Aided Design, 114:73–81, 2019
Zipeng Ye, Yong-Jin Liu, Jianmin Zheng, Kai Hormann, and Ying He. De-path: A differential-evolution-based method for computing energy-minimizing paths on surfaces.Computer- Aided Design, 114:73–81, 2019. 20
2019
-
[61]
A vari- ational framework for curve shortening in various geometric domains.IEEE Transactions on Visualization and Computer Graphics, 29(4):1951–1963, 2023
Na Yuan, Peihui Wang, Wenlong Meng, Shuangmin Chen, Jian Xu, Shiqing Xin, Ying He, and Wenping Wang. A vari- ational framework for curve shortening in various geometric domains.IEEE Transactions on Visualization and Computer Graphics, 29(4):1951–1963, 2023. 4
1951
-
[62]
N. Yuan, P. Wang, W. Meng, S. Chen, J. Xu, S. Xin, Y . He, and W. Wang. A variational framework for curve shortening 10 in various geometric domains.IEEE Transactions on Visual- ization and; Computer Graphics, 29(04):1951–1963, 2023. 5, 2, 20
1951
-
[63]
Open3D: A Modern Library for 3D Data Processing
Qian-Yi Zhou, Jaesik Park, and Vladlen Koltun. Open3D: A modern library for 3D data processing.arXiv:1801.09847,
work page internal anchor Pith review Pith/arXiv arXiv
-
[64]
Implementation Details 2 B
2 11 Supplementary Material Generalizing Curve Skeletonization to Continuous Domains A . Implementation Details 2 B . Pseduocode 2 C . Derivation for determining intersection within a face of a mesh 3 D . Evaluation metric 3 E . Curve Shortening using Edge Flip framework 4 E.1. Optimizing the loop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ...
-
[65]
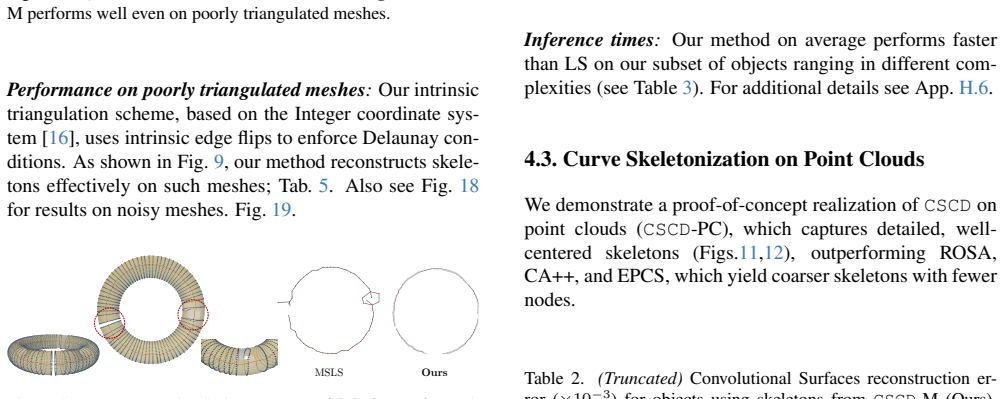
This provides improved robustness to poor triangulations
Firstly, we calculate the geodesic distance using Heat method on the vertices of the intrinsic triangulation. This provides improved robustness to poor triangulations
-
[66]
Secondly, we work purely within the tangent spaces of each vertex and each face. This requires us to perform parallel transport of gradients onto the same frames of reference whenever we need to do some comparison, such as when we want to identify angle between neighbouring gradients. This affects the final smoothing step too, where we work with barycentr...
-
[67]
We find that by working with the intrinsic mesh triangulations, our implementation results in a more robust algorithm
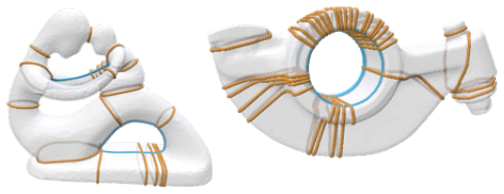
Finally, when constructing the ORG tree and pruning the ORG tree, we operate purely upon the intrinsic triangulations. We find that by working with the intrinsic mesh triangulations, our implementation results in a more robust algorithm. In Fig. 13 for the meshTID:44395, we see that our method results in a more stable and consistent cut loci given identic...
-
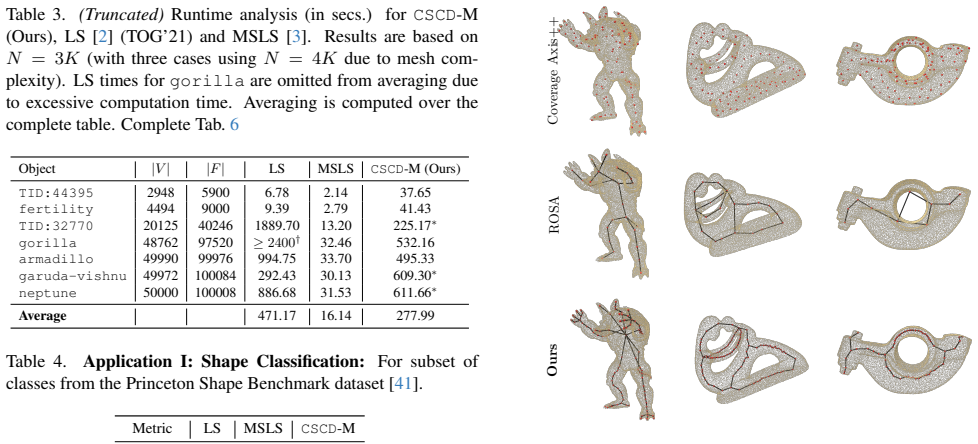
[68]
LS, MSLS and our method use different heuristics for sampling and selecting local separators, so the comparison is not direct. One could argue that LS could, in principle, be sped up by reducing the number of local separators sampled, but that parameter is not available in their codebase; therefore we have to stick to the pre-defined heuristics chosen by ...
-
[69]
We have chosen to implement this simple strategy, but we still observe comparable performance to LS (both qualitatively and quantitatively)
Our method uses a fixedN= 3000, while the number of separators can vary for both LS and MSLS. We have chosen to implement this simple strategy, but we still observe comparable performance to LS (both qualitatively and quantitatively). We suspect this is due to the differences in the heuristics for sampling, where we use geodesic distance to sample farther...
-
[70]
Our choices in the framework were made due to its simplicity and directness
As mentioned in the limitations, our realizationsCSCD-M andCSCD-PC are simply meant to be a starting point. Our choices in the framework were made due to its simplicity and directness. There are many places (such as the cut locus identification procedure) where one can easily speed up the algorithm. We also believe that our particular codebase can be cons...
-
[71]
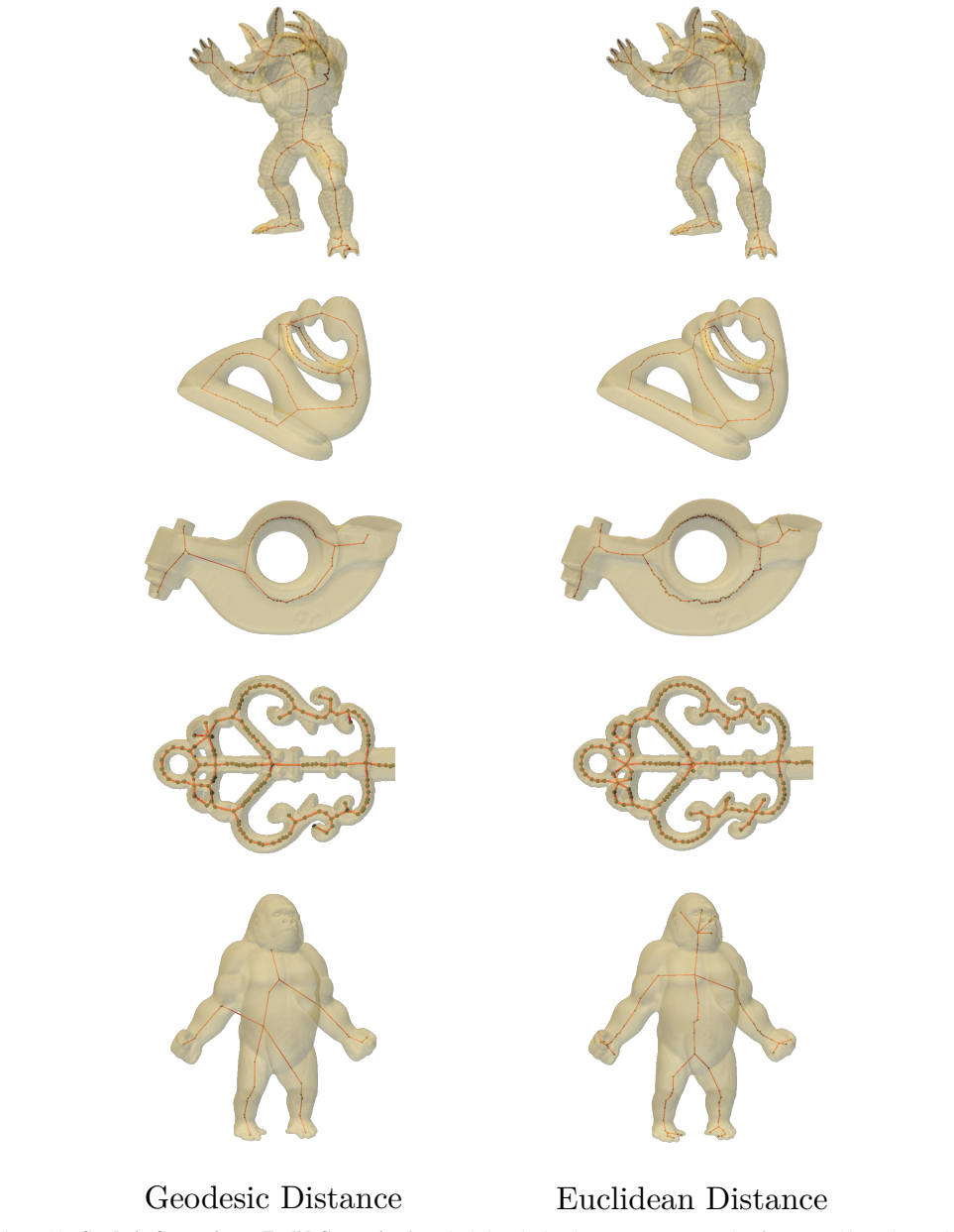
For the geodesic distance, we use a simple graph based distance
-
[72]
The target cut locus is then chosen similar to the current method, i.e., based on the minimum Euclidean distance
-
[73]
To optimize the curve, we can follow an iterative unfolding scheme, where the path between two vertices is iteratively shortened using Djikstra’s shortest path algorithm
-
[74]
With the optimized local separators, overlap can simply be checked by determining if two local separators share a vertex
-
[75]
Next, we assign the nearest vertices to each local separator, thereby creating the quotient graph
-
[76]
Finally, based on the quotient graph, the curve skeleton is constructed and post-processed. K.2. On the multiscale version ofCSCD-M CSCD-M has immense potential for a multi-scale approach. This is because we have the ability to sample points on the face of a low-poly mesh, and operate on these face surface points through barycentric interpolations. In thi...
-
[77]
central path
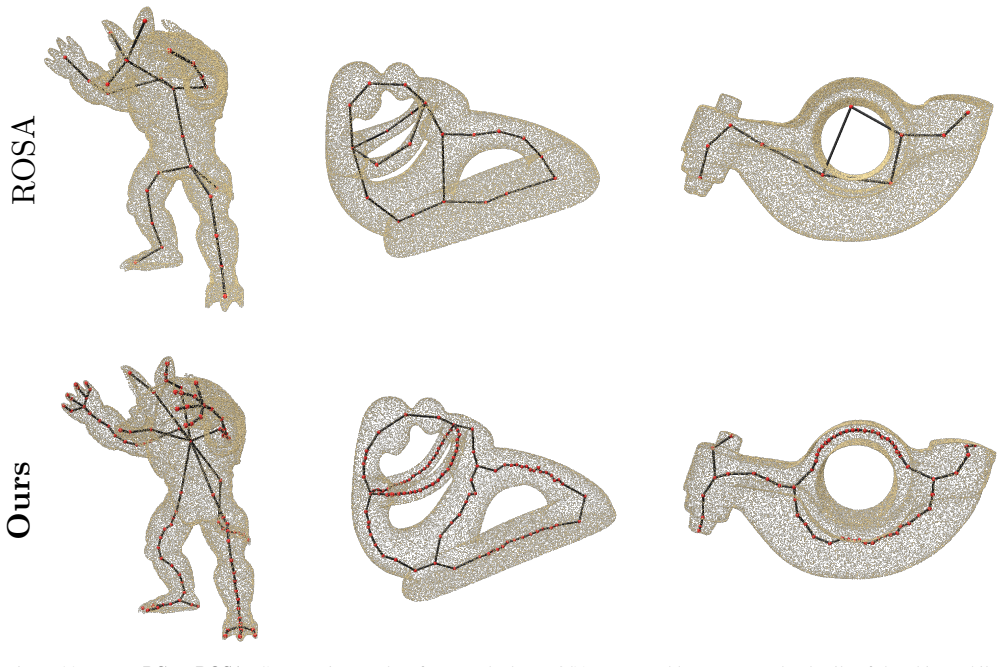
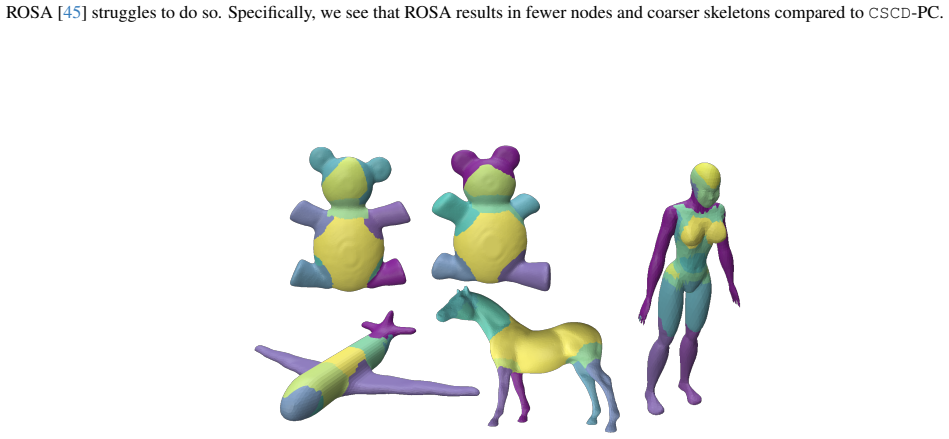
Our realizations are intended as starting points, with primary results on meshes and limited tests on point clouds. Future work could enhance individual modules for greater speed, robustness, and performance, and extend the framework to other representations. 12 ROSAOurs Figure 20.CSCD-PC vs ROSA:Comparative results of our method vs ROSA. We are able to c...
2048
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.