Towards Autonomous Commissioning of Industrial Drives via Multi-Objective Bayesian Optimization
Pith reviewed 2026-06-29 10:50 UTC · model grok-4.3
The pith
A black-box multi-objective Bayesian optimization approach can tune the current control loop of industrial drives to expert performance levels in minutes without human intervention or system models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that multi-objective Bayesian optimization using the Tree-structured Parzen Estimator, applied directly to real hardware, identifies Pareto-optimal controller parameters for the current control loop by minimizing tracking error, time-weighted error, overshoot, and oscillatory behavior, achieving results comparable to expert tuning in a fully automated manner.
What carries the argument
Multi-objective Bayesian optimization using the Tree-structured Parzen Estimator (TPE) applied to the black-box drive system for iterative closed-loop parameter tuning.
If this is right
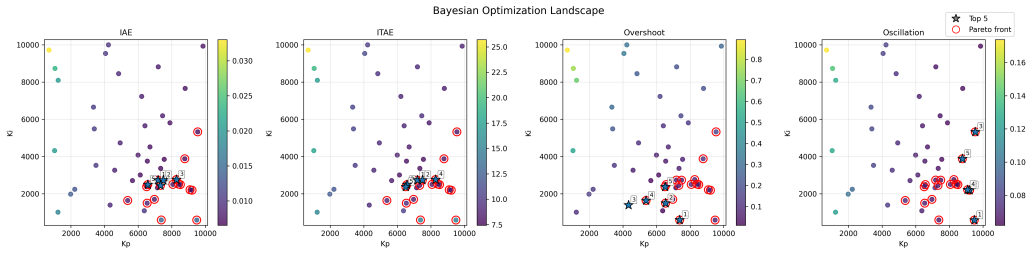
- The method identifies Pareto-optimal configurations balancing tracking error, time-weighted error, overshoot, and oscillatory behavior.
- TPE-based BO achieves faster convergence, richer Pareto-front approximation, and lower computational overhead than GP-based BO in this setting.
- The approach functions under industrial constraints including communication latency and limited evaluation budgets.
- Automated tuning reaches expert-comparable performance on real hardware in minutes without intervention.
Where Pith is reading between the lines
- Extending the method to loaded conditions or other control loops could broaden its applicability if the black-box assumption remains valid.
- Combining this with continuous monitoring might enable adaptive tuning during normal operation.
- The Pareto front might expose performance trade-offs that manual tuning overlooks.
Load-bearing premise
The drive can be treated as a black-box system whose parameters are iteratively updated through closed-loop experiments without requiring a system model or firmware modifications.
What would settle it
Running the tuning procedure on the real motor drive system under load conditions and observing whether the automated method still reaches performance comparable to expert tuning within a few minutes.
Figures


read the original abstract
The commissioning of industrial electric drives still relies heavily on manual tuning of cascaded control loops, requiring expert knowledge and significant time. In this paper, we propose a fully automated approach for tuning the current control loop of industrial drives using Bayesian Optimization (BO) directly on real hardware, without requiring a system model or firmware modifications. The drive is treated as a black-box system, and the controller parameters are iteratively updated through closed-loop experiments. The tuning problem is formulated as a multi-objective optimization task that directly minimizes tracking error, time-weighted error, overshoot, and oscillatory behavior, enabling the identification of Pareto-optimal controller configurations. To address discrete parameters, noisy evaluations, and limited budgets, we adopt a multivariate Tree-structured Parzen Estimator (TPE) as the underlying BO strategy. The proposed method operates under practical industrial constraints, including communication latency and limited evaluation budgets. The experimental validation on a real motor drive system under no-load conditions shows that the method achieves performance comparable to expert tuning within a few minutes and without human intervention. Results show that Gaussian Process (GP)-based BO can yield highly competitive final solutions, but TPE-based BO is better aligned with this setting due to faster convergence, richer Pareto-front approximation, and lower computational overhead.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a fully automated, model-free method for commissioning the current control loop of industrial drives by formulating the task as multi-objective Bayesian optimization and solving it directly on hardware with the Tree-structured Parzen Estimator (TPE). Controller parameters are updated through closed-loop experiments that minimize four objectives (tracking error, time-weighted error, overshoot, oscillatory behavior) while respecting industrial constraints such as discrete parameters, communication latency, and limited evaluation budgets. Experiments on a real motor drive under no-load conditions are reported to reach performance comparable to expert tuning within minutes.
Significance. If the empirical results hold, the work provides a concrete demonstration that multi-objective TPE-based BO can automate a practically important industrial task without firmware changes or system identification. The real-hardware validation under explicit no-load scope, the direct comparison of TPE versus GP, and the explicit handling of latency and discrete parameters are strengths that increase the result's relevance to control-engineering practice.
major comments (2)
- [§5] §5 (Experimental validation): the claim that TPE-based BO 'achieves performance comparable to expert tuning' is load-bearing for the central contribution, yet the section provides no quantitative definition of the expert baseline, no report of the number of independent runs, and no statistical comparison (e.g., confidence intervals or hypothesis tests) of the final objective values.
- [§3.2] §3.2 (Objective formulation): the four objectives are stated to be minimized directly, but the precise mapping from measured step-response signals to each scalar objective (including any filtering, windowing, or normalization) is not given; this mapping is required to assess whether the Pareto front is reproducible and whether the reported trade-offs are meaningful.
minor comments (2)
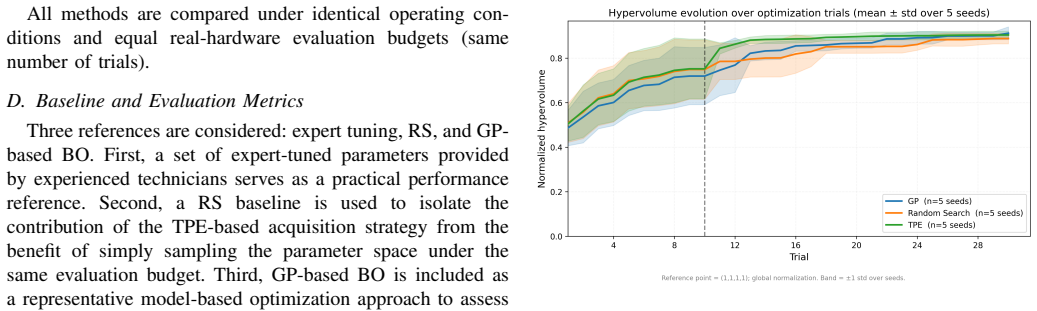
- [§4] The abstract and §4 mention that TPE is preferred for 'faster convergence' and 'richer Pareto-front approximation,' but the corresponding convergence plots and hypervolume indicators are not referenced by figure number.
- Notation for the four objective functions is introduced without an explicit equation block; adding numbered equations would improve traceability when the objectives are later evaluated in the experiments.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point-by-point below and will revise the manuscript to incorporate the requested clarifications and details.
read point-by-point responses
-
Referee: [§5] §5 (Experimental validation): the claim that TPE-based BO 'achieves performance comparable to expert tuning' is load-bearing for the central contribution, yet the section provides no quantitative definition of the expert baseline, no report of the number of independent runs, and no statistical comparison (e.g., confidence intervals or hypothesis tests) of the final objective values.
Authors: We agree that the current presentation of the experimental results in §5 lacks the requested quantitative rigor. In the revised manuscript we will add: (i) an explicit description of the expert tuning procedure used to define the baseline, (ii) the number of independent optimization runs performed, and (iii) statistical summaries (means, standard deviations, and confidence intervals) of the final objective values together with any applicable hypothesis testing. These additions will be placed in §5 and the associated figures/tables. revision: yes
-
Referee: [§3.2] §3.2 (Objective formulation): the four objectives are stated to be minimized directly, but the precise mapping from measured step-response signals to each scalar objective (including any filtering, windowing, or normalization) is not given; this mapping is required to assess whether the Pareto front is reproducible and whether the reported trade-offs are meaningful.
Authors: We acknowledge that the exact signal-to-objective mapping is not fully specified in the present text. In the revision we will insert, in §3.2, the complete mathematical definitions for each of the four objectives, including all filtering, windowing, normalization, and any other preprocessing steps applied to the measured step-response signals. This will enable direct reproduction of the reported Pareto fronts. revision: yes
Circularity Check
Empirical validation with no circular derivation chain
full rationale
The paper presents a scoped empirical demonstration of applying standard multi-objective Bayesian optimization (TPE and GP variants) to tune drive parameters directly on physical hardware treated as a black-box. No mathematical derivation, prediction, or uniqueness claim is made that reduces by construction to fitted inputs, self-citations, or ansatzes; the central result rests on closed-loop experiments under stated constraints (no-load, latency, limited budget) and direct comparison to expert tuning, which is externally falsifiable and independent of any internal reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Optimum settings for automatic con- trollers,
J. G. Ziegler and N. B. Nichols, “Optimum settings for automatic con- trollers,”Transactions of the American society of mechanical engineers, vol. 64, no. 8, pp. 759–765, 1942
1942
-
[2]
Theoretical consideration of retarded control,
G. Cohen and G. Coon, “Theoretical consideration of retarded control,” Transactions of the American Society of Mechanical Engineers, vol. 75, no. 5, pp. 827–834, 1953
1953
-
[3]
Automatic tuning of simple regula- tors with specifications on phase and amplitude margins,
K. J. ˚Astr¨om and T. H ¨agglund, “Automatic tuning of simple regula- tors with specifications on phase and amplitude margins,”Automatica, vol. 20, no. 5, pp. 645–651, 1984
1984
-
[4]
A review of pid control, tuning methods and applications: Rp borase et al
R. P. Borase, D. Maghade, S. Sondkar, and S. Pawar, “A review of pid control, tuning methods and applications: Rp borase et al.”International Journal of Dynamics and Control, vol. 9, no. 2, pp. 818–827, 2021
2021
-
[5]
Model-free current loop autotuning for synchronous reluctance motor drives,
D. Pasqualotto, F. Tinazzi, and M. Zigliotto, “Model-free current loop autotuning for synchronous reluctance motor drives,”Automation, vol. 1, no. 1, p. 3, 2020
2020
-
[6]
A particle swarm optimization approach for optimum design of pid controller in avr system,
Z.-L. Gaing, “A particle swarm optimization approach for optimum design of pid controller in avr system,”IEEE transactions on energy conversion, vol. 19, no. 2, pp. 384–391, 2004
2004
-
[7]
Design of pid- type controllers using multiobjective genetic algorithms,
A. Herreros, E. Baeyens, and J. R. Per ´an, “Design of pid- type controllers using multiobjective genetic algorithms,”ISA Transactions, vol. 41, no. 4, pp. 457–472, 2002. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0019057807601025
2002
-
[8]
Review of intelligent and nature-inspired algorithms-based methods for tuning pid controllers in industrial applications,
R. S. Patil, S. P. Jadhav, and M. D. Patil, “Review of intelligent and nature-inspired algorithms-based methods for tuning pid controllers in industrial applications,”Journal of Robotics and Control (JRC), vol. 5, no. 2, pp. 336–358, 2024
2024
-
[9]
Bayesian optimization for automatic tuning of digital multi-loop pid controllers,
J. P. Coutinho, L. O. Santos, and M. S. Reis, “Bayesian optimization for automatic tuning of digital multi-loop pid controllers,”Computers & Chemical Engineering, vol. 173, p. 108211, 2023. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0098135423000807
2023
-
[10]
Safe contextual bayesian optimization for sustainable room temperature pid control tuning,
M. Fiducioso, S. Curi, B. Schumacher, M. Gwerder, and A. Krause, “Safe contextual bayesian optimization for sustainable room temperature pid control tuning,” inProceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, IJCAI-19. International Joint Conferences on Artificial Intelligence Organization, 7 2019, pp. 5850–5856....
-
[11]
Safety-aware cascade controller tuning using constrained bayesian optimization,
M. Khosravi, C. K ¨onig, M. Maier, R. S. Smith, J. Lygeros, and A. Rupenyan, “Safety-aware cascade controller tuning using constrained bayesian optimization,”IEEE Transactions on Industrial Electronics, vol. 70, no. 2, pp. 2128–2138, 2022
2022
-
[12]
Controller tuning with bayesian optimization and its acceleration: Concept and experimental validation,
Y . Fujimoto, H. Sato, and M. Nagahara, “Controller tuning with bayesian optimization and its acceleration: Concept and experimental validation,” Asian Journal of Control, vol. 25, no. 3, pp. 2408–2414, 2023
2023
-
[13]
Guided bayesian optimization: Data-efficient controller tuning with digital twin,
M. Nobar, J. Keller, A. Rupenyan, M. Khosravi, and J. Lygeros, “Guided bayesian optimization: Data-efficient controller tuning with digital twin,” IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 11 304–11 317, 2024
2024
-
[14]
Bayesian optimization-based nonlinear adaptive pid controller design for robust mobile manipulation,
H. Hajieghrary, M. P. Deisenroth, and Y . Bekiroglu, “Bayesian optimization-based nonlinear adaptive pid controller design for robust mobile manipulation,” in2022 IEEE 18th International Conference on Automation Science and Engineering (CASE). IEEE, 2022, pp. 1009– 1016
2022
-
[15]
Algorithms for hyper- parameter optimization,
J. Bergstra, R. Bardenet, Y . Bengio, and B. K ´egl, “Algorithms for hyper- parameter optimization,”Advances in neural information processing systems, vol. 24, 2011
2011
-
[16]
S. Watanabe, “Tree-structured parzen estimator: Understanding its al- gorithm components and their roles for better empirical performance,” arXiv preprint arXiv:2304.11127, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[17]
Optuna: A next- generation hyperparameter optimization framework,
T. Akiba, S. Sano, T. Yanase, T. Ohta, and M. Koyama, “Optuna: A next- generation hyperparameter optimization framework,” inProceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, 2019
2019
-
[18]
Multiobjective optimization using evolutionary algorithms — a comparative case study,
E. Zitzler and L. Thiele, “Multiobjective optimization using evolutionary algorithms — a comparative case study,” inParallel Problem Solving from Nature — PPSN V, A. E. Eiben, T. B ¨ack, M. Schoenauer, and H.-P. Schwefel, Eds. Berlin, Heidelberg: Springer Berlin Heidelberg, 1998, pp. 292–301
1998
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.