SOCO: Benchmarking Semantic Object Correspondence in Vision Foundation Models
Pith reviewed 2026-07-02 22:49 UTC · model grok-4.3
The pith
Semantic object correspondence performance predicts dense downstream tasks more strongly than ImageNet classification.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
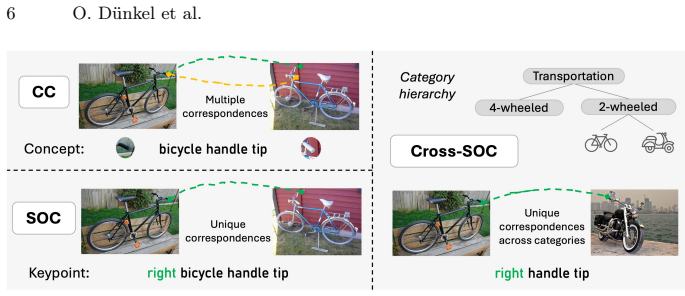
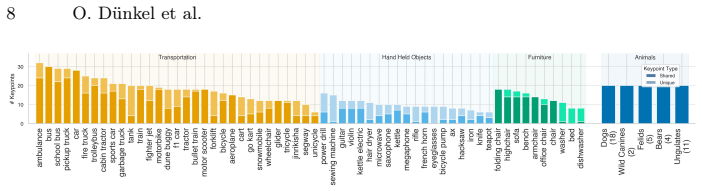
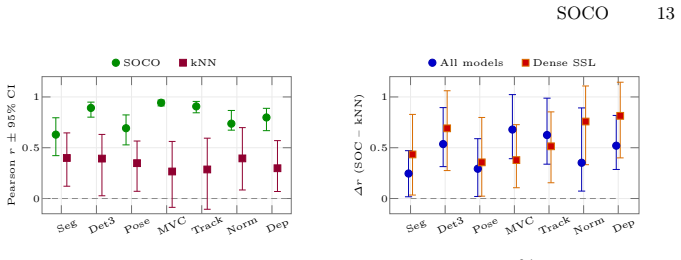
SOCO supplies a taxonomy of correspondence types together with consistent, functionally meaningful keypoint annotations across 100 categories and over 1M pairs, plus language descriptions for evaluating both visual and text-grounded matching. Vision foundation backbones encode strong semantic structure but transfer correspondences poorly across related categories and only partially capture object-part position. LVLMs prove stronger at text-prompted part localization than at visual-reference cross-image matching. Correspondence performance predicts performance on dense downstream tasks, including segmentation, tracking, 3D pose estimation, and 3D detection, more strongly than ImageNet classif
What carries the argument
The SOCO benchmark, which supplies a taxonomy of correspondence types and over 1M consistent keypoint pairs with language descriptions across 100 categories.
If this is right
- Vision foundation models encode semantic structure that does not transfer reliably across related object categories.
- Large vision-language models localize parts better from language than from visual reference matching.
- Semantic correspondence evaluation captures structured understanding that standard classification misses.
- Models with stronger semantic correspondence are expected to perform better on segmentation, tracking, and 3D tasks.
Where Pith is reading between the lines
- Training objectives that directly optimize semantic correspondence could improve results across multiple dense prediction problems.
- Extending the benchmark to video or 3D mesh data might expose additional limits in current models' part-level representations.
- Separate evaluation protocols for visual versus language-grounded correspondence may be needed to close the observed gap in LVLMs.
Load-bearing premise
The provided keypoint annotations are consistent, functionally meaningful, and representative of semantic correspondence across instances and categories.
What would settle it
A model that scores high on SOCO yet performs worse than lower-scoring models on segmentation, tracking, 3D pose estimation, or 3D detection would falsify the claim that correspondence performance is the stronger predictor.
Figures

read the original abstract
Measuring structured object understanding in vision foundation models remains challenging due to inconsistent evaluation protocols and limited part-level supervision. Semantic correspondence (SC) evaluates this capability by testing whether object parts can be matched across instances and categories under large variations in appearance, viewpoint, and geometry. To enable a systematic SC evaluation, we introduce SOCO, a new benchmark for Semantic Object Correspondence that introduces a taxonomy of correspondence types and provides consistent, functionally meaningful keypoint annotations across 100 categories and over 1M correspondence pairs. In addition, SOCO includes keypoint language descriptions, enabling the evaluation of large vision-language models (LVLMs) and their fine-grained part-level understanding. Comprehensive experiments reveal that (i) vision foundation backbones encode strong semantic structure but transfer correspondences poorly across related categories and only partially capture object-part position, (ii) LVLMs are stronger at text-prompted part localization than at visual-reference cross-image matching, exposing a gap between language-grounded localization and fine-grained visual correspondence, and (iii) correspondence performance predicts performance on dense downstream tasks, including segmentation, tracking, 3D pose estimation, and 3D detection, more strongly than ImageNet classification. Together, these findings position SOCO as a benchmark for structured, part-level representation quality in vision and multimodal foundation models.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces SOCO, a benchmark for semantic object correspondence (SC) in vision foundation models and large vision-language models (LVLMs). It defines a taxonomy of correspondence types, supplies consistent keypoint annotations across 100 categories and >1M pairs plus language descriptions, and reports three findings: (i) vision backbones encode semantic structure but transfer correspondences poorly across categories and only partially capture part position; (ii) LVLMs are stronger at text-prompted part localization than visual-reference matching; (iii) SC performance on SOCO predicts dense downstream tasks (segmentation, tracking, 3D pose estimation, 3D detection) more strongly than ImageNet classification accuracy.
Significance. If the keypoint annotations prove reliable, SOCO would supply a large-scale, part-level evaluation resource that directly targets structured object understanding, a capability only indirectly measured by existing protocols. The explicit comparison of SC versus ImageNet as predictors of dense-task performance, together with the inclusion of LVLMs, would be a useful contribution to foundation-model evaluation. The scale (>1M pairs) and the provision of language descriptions are concrete strengths.
major comments (2)
- [Abstract and §3] Abstract and §3 (Benchmark Construction): the central claim that SOCO scores are a faithful proxy for structured object understanding (and therefore a stronger predictor than ImageNet) rests on the annotations being “consistent, functionally meaningful” across 100 categories. No inter-annotator agreement statistics, consistency checks across instances, or validation against functional equivalence are reported; without these, any downstream correlation analysis risks capturing annotation artifacts rather than representational structure.
- [§4 and §5] §4 (Experiments) and §5 (Downstream Correlation): the claim that correspondence performance predicts segmentation, tracking, 3D pose, and 3D detection more strongly than ImageNet accuracy requires the correlation methodology—data splits, number of models evaluated, statistical significance tests, and controls for model capacity—to be fully specified. These details are absent from the abstract and not verifiable from the provided text, undermining the comparative strength asserted in finding (iii).
minor comments (1)
- [Abstract] Abstract: the summary of experimental findings omits any mention of methods, data splits, or statistical details; a one-sentence methods clause would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on annotation reliability and methodological transparency. We address each major comment below and will incorporate clarifications and additions in the revised manuscript.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (Benchmark Construction): the central claim that SOCO scores are a faithful proxy for structured object understanding (and therefore a stronger predictor than ImageNet) rests on the annotations being “consistent, functionally meaningful” across 100 categories. No inter-annotator agreement statistics, consistency checks across instances, or validation against functional equivalence are reported; without these, any downstream correlation analysis risks capturing annotation artifacts rather than representational structure.
Authors: We agree that explicit validation of annotation consistency is necessary to support the claims. The original submission omitted these statistics. In the revision we will add a dedicated subsection in §3 reporting inter-annotator agreement (Cohen’s kappa and percentage agreement) computed on a 20-category subset annotated by five independent annotators, instance-level consistency checks across the 100 categories, and a functional-equivalence validation performed by domain experts. These additions will be accompanied by the raw agreement numbers and will directly address the risk of annotation artifacts. revision: yes
-
Referee: [§4 and §5] §4 (Experiments) and §5 (Downstream Correlation): the claim that correspondence performance predicts segmentation, tracking, 3D pose, and 3D detection more strongly than ImageNet accuracy requires the correlation methodology—data splits, number of models evaluated, statistical significance tests, and controls for model capacity—to be fully specified. These details are absent from the abstract and not verifiable from the provided text, undermining the comparative strength asserted in finding (iii).
Authors: We acknowledge that the correlation analysis protocol must be stated explicitly in the main text. The revised §5 will include: (i) the precise data splits (80/20 per downstream task, with no category overlap between SOCO and downstream sets), (ii) the full list of evaluated models (12 vision backbones + 5 LVLMs), (iii) the statistical procedure (Pearson r with two-tailed p-values and bootstrap confidence intervals), and (iv) capacity controls (partial correlation after regressing out parameter count and ImageNet accuracy). These details existed in the supplementary material; they will now appear in the main paper with a reference to the supplementary tables. revision: yes
Circularity Check
Empirical benchmark study with no derivation chain or self-referential fitting
full rationale
The paper presents SOCO as a new benchmark with keypoint annotations across categories and reports experimental correlations between semantic correspondence scores, downstream task performance, and ImageNet accuracy. No equations, fitted parameters, or derivations are described. The central claim (iii) is an empirical statistical observation from model evaluations, not a reduction to inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. The work is self-contained as an evaluation study; annotation quality affects validity but does not create circularity in any claimed derivation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Keypoint annotations can be defined consistently and meaningfully across object instances and categories
Reference graph
Works this paper leans on
-
[1]
NeurIPS35(2022)
Alayrac, J.B., Donahue, J., Luc, P., Miech, A., Barr, I., Hasson, Y., Lenc, K., Mensch, A., Millicah, K., Reynolds, M., Ring, R., Rutherford, E., Cabi, S., Han, T., Gong, Z., Samangooei, S., Monteiro, M., Menick, J., Borgeaud, S., Brock, A., Nematzadeh, A., Sharifzadeh, S., Binkowski, M., Barreira, R., Vinyals, O., Zisserman, A., Simonyan, K.: Flamingo: A...
2022
-
[2]
In: CVPR
Andriluka, M., Pishchulin, L., Gehler, P., Schiele, B.: 2D human pose estimation: New benchmark and state of the art analysis. In: CVPR. pp. 3686–3693 (2014)
2014
-
[3]
In: CVPR
Assran, M., Duval, Q., Misra, I., Bojanowski, P., Vincent, P., Rabbat, M., Le- Cun, Y., Ballas, N.: Self-supervised learning from images with a joint-embedding predictive architecture. In: CVPR. pp. 15619–15629 (2023)
2023
-
[4]
Aydemir, G., Xie, W., Güney, F.: Can visual foundation models achieve long-term point tracking? In: ECCV Workshops (2024)
2024
-
[5]
Qwen-VL: A Versatile Vision-Language Model for Understanding, Localization, Text Reading, and Beyond
Bai, J., Bai, S., Yang, S., Wang, S., Tan, S., Wang, P., Lin, J., Zhou, C., Zhou, J.: Qwen-VL: A versatile vision-language model for understanding, localization, text reading, and beyond. arXiv preprint arXiv:2308.12966 (2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[6]
Bai, S., Cai, Y., Chen, R., Chen, K., Chen, X., Cheng, Z., Deng, L., Ding, W., Gao, C., Ge, C., et al.: Qwen3-VL technical report. arXiv preprint arXiv:2511.21631 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[7]
Bai, S., Chen, K., Liu, X., Wang, J., Ge, W., Song, S., Dang, K., Wang, P., Wang, S., Tang, J., Zhong, H., Zhu, Y., Yang, M., Li, Z., Wan, J., Wang, P., Ding, W., Fu, Z., Xu, Y., Ye, J., Zhang, X., Xie, T., Cheng, Z., Zhang, H., Yang, Z., Xu, H., Lin, J.: Qwen2.5-VL technical report. arXiv preprint arXiv:2502.13923 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[8]
ARKitScenes: A Diverse Real-World Dataset For 3D Indoor Scene Understanding Using Mobile RGB-D Data
Baruch, G., Chen, Z., Dehghan, A., Dimry, T., Feigin, Y., Fu, P., Gebauer, T., Joffe, B., Kurz, D., Schwartz, A., Shulman, E.: ARKitScenes: A diverse real- world dataset for 3D indoor scene understanding using mobile RGB-D data. arXiv preprint arXiv:2111.08897 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[9]
Perception Encoder: The best visual embeddings are not at the output of the network
Bolya, D., Huang, P.Y., Sun, P., Cho, J.H., Madotto, A., Wei, C., Ma, T., Zhi, J., Rajasegaran, J., Rasheed, H., et al.: Perception encoder: The best visual em- beddings are not at the output of the network. arXiv preprint arXiv:2504.13181 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[10]
In: CVPR (2023)
Brazil, G., Kumar, A., Straub, J., Ravi, N., Johnson, J., Gkioxari, G.: Omni3D: A large benchmark and model for 3D object detection in the wild. In: CVPR (2023)
2023
-
[11]
In: ECCV
Butler, D.J., Wulff, J., Stanley, G.B., Black, M.J.: A naturalistic open source movie for optical flow evaluation. In: ECCV. pp. 611–625 (2012)
2012
-
[12]
Depthlm: Metric depth from vision language models.arXiv preprint arXiv:2509.25413,
Cai, Z., Yeh, C.F., Xu, H., Liu, Z., Meyer, G., Lei, X., Zhao, C., Li, S.W., Chandra, V., Shi, Y.: DepthLM: Metric depth from vision language models. arXiv preprint arXiv:2509.25413 (2025)
-
[13]
In: ICCV (2021)
Caron, M., Touvron, H., Misra, I., Jégou, H., Mairal, J., Bojanowski, P., Joulin, A.: Emerging properties in self-supervised vision transformers. In: ICCV (2021)
2021
-
[14]
In: 3DV (2026)
Chi, Y., Sommer, L., Dünkel, O., Muhle, D., Cremers, D., Theobalt, C., Ko- rtylewski, A.: C3PO: Canonicalization of 3D pose from partial views with gen- eralizable correspondence features. In: 3DV (2026)
2026
-
[15]
In: CVPR
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler, M., Benenson, R., Franke, U., Roth, S., Schiele, B.: The cityscapes dataset for semantic urban scene understanding. In: CVPR. pp. 3213–3223 (2016)
2016
-
[16]
In: CVPR
Deng, J., Dong, W., Socher, R., Li, L.J., Li, K., Fei-Fei, L.: ImageNet: A large-scale hierarchical image database. In: CVPR. pp. 248–255 (2009) 20 O. Dünkel et al
2009
-
[17]
NeurIPS35, 13610–13626 (2022)
Doersch,C.,Gupta,A.,Markeeva,L.,Recasens,A.,Smaira,L.,Aytar,Y.,Carreira, J., Zisserman, A., Yang, Y.: TAP-Vid: A benchmark for tracking any point in a video. NeurIPS35, 13610–13626 (2022)
2022
-
[18]
In: ICCV (2025)
Dünkel, O., Jesslen, A., Xie, J., Theobalt, C., Rupprecht, C., Kortylewski, A.: CNS-Bench: Benchmarking image classifier robustness under continuous nuisance shifts. In: ICCV (2025)
2025
-
[19]
In: ICCV (2025)
Dünkel, O., Wimmer, T., Theobalt, C., Rupprecht, C., Kortylewski, A.: Do it yourself: Learning semantic correspondence from pseudo-labels. In: ICCV (2025)
2025
-
[20]
In: CVPR
El Banani, M., Raj, A., Maninis, K.K., Kar, A., Li, Y., Rubinstein, M., Sun, D., Guibas, L., Johnson, J., Jampani, V.: Probing the 3D awareness of visual foundation models. In: CVPR. pp. 21795–21806 (2024)
2024
-
[21]
IJCV 111(1), 98–136 (2015)
Everingham, M., Eslami, S.M.A., Van Gool, L., Williams, C.K.I., Winn, J., Zis- serman, A.: The PASCAL visual object classes challenge: A retrospective. IJCV 111(1), 98–136 (2015)
2015
-
[22]
IJCV88(2), 303–338 (2010)
Everingham, M., Van Gool, L., Williams, C.K.I., Winn, J., Zisserman, A.: The PASCAL visual object classes (VOC) challenge. IJCV88(2), 303–338 (2010)
2010
-
[23]
Dense Object Nets: Learning Dense Visual Object Descriptors By and For Robotic Manipulation
Florence, P.R., Manuelli, L., Tedrake, R.: Dense object nets: Learning dense visual object descriptors by and for robotic manipulation. arXiv preprint arXiv:1806.08756 (2018)
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[24]
In: ECCV (2024)
Fu, X., Hu, Y., Li, B., Feng, Y., Wang, H., Lin, X., Roth, D., Smith, N.A., Ma, W.C., Krishna, R.: BLINK: Multimodal large language models can see but not perceive. In: ECCV (2024)
2024
-
[25]
In: NeurIPS (2025)
Gan, C., Tu, Y., Chen, X., Chen, T., Li, Y., Harandi, M., Lin, W.: Unleashing diffusiontransformersforvisualcorrespondencebymodulatingmassiveactivations. In: NeurIPS (2025)
2025
-
[26]
Gemini: A Family of Highly Capable Multimodal Models
Gemini Team: Gemini: A family of highly capable multimodal models. arXiv preprint arXiv:2312.11805 (2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[27]
In: CVPR
Ham, B., Cho, M., Schmid, C., Ponce, J.: Proposal flow. In: CVPR. pp. 3475–3484 (2016)
2016
-
[28]
In: CVPR
He, K., Chen, X., Xie, S., Li, Y., Dollár, P., Girshick, R.: Masked autoencoders are scalable vision learners. In: CVPR. pp. 16000–16009 (2022)
2022
-
[29]
In: CVPR (2025)
Heinrich, G., Ranzinger, M., Yin, H., Lu, Y., Kautz, J., Tao, A., Catanzaro, B., Molchanov, P.: RADIOv2.5: Improved baselines for agglomerative vision founda- tion models. In: CVPR (2025)
2025
-
[30]
Hurst, A., Lerer, A., Goucher, A.P., Perelman, A., Ramesh, A., Clark, A., Ostrow, A.J., Welihinda, A., Hayes, A., Radford, A., et al.: GPT-4o system card. arXiv preprint arXiv:2410.21276 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[31]
In: NeurIPS (2023)
Jampani, V., Maninis, K.K., Engelhardt, A., Karpur, A., Truong, K., Sargent, K., Popov, S., Araujo, A., Martin-Brualla, R., Patel, K., Vlasic, D., Ferrari, V., Makadia, A., Liu, C., Li, Y., Zhou, H.: NAVI: Category-agnostic image collections with high-quality 3D shape and pose annotations. In: NeurIPS (2023)
2023
-
[32]
Kornblith, S., Shlens, J., Le, Q.V.: Do better ImageNet models transfer better? In: CVPR. pp. 2661–2671 (2019)
2019
-
[33]
TMLR (2024)
Li, B., Zhang, Y., Guo, D., Zhang, R., Li, F., Zhang, H., Zhang, K., Zhang, P., Li, Y., Liu, Z., Li, C.: LLaVA-OneVision: Easy visual task transfer. TMLR (2024)
2024
-
[34]
In: ICML (2022)
Li, J., Li, D., Xiong, C., Hoi, S.: BLIP: Bootstrapping language-image pre-training for unified vision-language understanding and generation. In: ICML (2022)
2022
-
[35]
In: CVPR
Lin, T.Y., Dollár, P., Girshick, R., He, K., Hariharan, B., Belongie, S.: Feature pyramid networks for object detection. In: CVPR. pp. 936–944 (2017) SOCO 21
2017
-
[36]
In: ECCV
Lin, T.Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ramanan, D., Dollár, P., Zitnick, C.L.: Microsoft COCO: Common objects in context. In: ECCV. pp. 740–755 (2014)
2014
-
[37]
In: ECCV
Liu, C., Yuen, J., Torralba, A., Sivic, J., Freeman, W.T.: SIFT flow: Dense corre- spondence across different scenes. In: ECCV. pp. 28–42 (2008)
2008
-
[38]
In: NeurIPS (2023)
Liu, H., Li, C., Wu, Q., Lee, Y.J.: Visual instruction tuning. In: NeurIPS (2023)
2023
-
[39]
Liu, Y., Duan, H., Zhang, Y., Li, B., Zhang, S., Zhao, W., Yuan, Y., Wang, J., He, C., Liu, Z., et al.: MMBench: Is your multi-modal model an all-around player? In: ECCV. pp. 216–233 (2024)
2024
-
[40]
In: NeurIPS (2023)
Luo, G., Dunlap, L., Park, D.H., Holynski, A., Darrell, T.: Diffusion hyperfeatures: Searching through time and space for semantic correspondence. In: NeurIPS (2023)
2023
-
[41]
NeurIPS37, 96127–96149 (2024)
Ma, W., Zhang, G., Liu, Q., Zeng, G., Kortylewski, A., Liu, Y., Yuille, A.: Im- ageNet3D: Towards general-purpose object-level 3D understanding. NeurIPS37, 96127–96149 (2024)
2024
-
[42]
arXiv preprint arXiv:2506.08220 (2025)
Mariotti, O., Du, Z., Bhalgat, Y., Mac Aodha, O., Bilen, H.: Jamais vu: Expos- ing the generalization gap in supervised semantic correspondence. arXiv preprint arXiv:2506.08220 (2025)
-
[43]
In: CVPR
Mariotti, O., Mac Aodha, O., Bilen, H.: Improving semantic correspondence with viewpoint-guided spherical maps. In: CVPR. pp. 19521–19530 (2024)
2024
-
[44]
In: CVPR
Mayer, N., Ilg, E., Hausser, P., Fischer, P., Cremers, D., Dosovitskiy, A., Brox, T.: A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. In: CVPR. pp. 4040–4048 (2016)
2016
-
[45]
arXiv prepreint arXiv:1908.10543 , year=
Min, J., Lee, J., Ponce, J., Cho, M.: SPair-71k: A large-scale benchmark for se- mantic correspondence. arXiv preprint arXiv:1908.10543 (2019)
-
[46]
OpenAI, Applin, S., Adesso, G., Ashfaq, R., Bai, M., Brammer, M., Fecht, E., Goodman, A., Grossman, S., Groh, M., Kirk, H.R., Gunitsky, S., Huang, Y., Kahn, L., Kumar, S., Madrid-Morales, D., Motoki, F., Ovadya, A., Peters, U., Robinson, M., Röttger, P., Wasserman, H., Wehsener, A., Walker, L., Vidgen, B., Zhu, J.: GPT-4V(ision) system card. Tech. rep., O...
2023
-
[47]
TMLR (2024)
Oquab, M., Darcet, T., Moutakanni, T., Vo, H.V., Szafraniec, M., Khalidov, V., Fernandez, P., Haziza, D., Massa, F., El-Nouby, A., Howes, R., Huang, P.Y., Xu, H., Sharma, V., Li, S.W., Galuba, W., Rabbat, M., Assran, M., Ballas, N., Syn- naeve, G., Misra, I., Jégou, H., Mairal, J., Labatut, P., Joulin, A., Bojanowski, P.: DINOv2: Learning robust visual fe...
2024
-
[48]
In: ICML
Radford, A., Kim, J.W., Hallacy, C., Ramesh, A., Goh, G., Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark, J., et al.: Learning transferable visual models from natural language supervision. In: ICML. pp. 8748–8763 (2021)
2021
-
[49]
In: ICCV
Ranftl, R., Bochkovskiy, A., Koltun, V.: Vision transformers for dense prediction. In: ICCV. pp. 12179–12188 (2021)
2021
-
[50]
In: CVPR
Ranzinger,M.,Heinrich,G.,Kautz,J.,Molchanov,P.:AM-RADIO:Agglomerative vision foundation model reduce all domains into one. In: CVPR. pp. 12490–12500 (2024)
2024
-
[51]
arXiv preprint arXiv:2601.17237 (2026)
Ranzinger, M., Heinrich, G., McCarthy, C., Kautz, J., Tao, A., Catanzaro, B., Molchanov, P.: C-RADIOv4 technical report. arXiv preprint arXiv:2601.17237 (2026)
-
[52]
In: CVPR
Rocco, I., Arandjelovic, R., Sivic, J.: Convolutional neural network architecture for geometric matching. In: CVPR. pp. 6148–6157 (2017)
2017
-
[53]
In: CVPR
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., Ommer, B.: High-resolution image synthesis with latent diffusion models. In: CVPR. pp. 10684–10695 (2022) 22 O. Dünkel et al
2022
-
[54]
In: CVPR
Sarıyıldız, M.B., Weinzaepfel, P., Lucas, T., De Jorge, P., Larlus, D., Kalantidis, Y.: DUNE: Distilling a universal encoder from heterogeneous 2D and 3D teachers. In: CVPR. pp. 30084–30094 (2025)
2025
-
[55]
IJCV47(1), 7–42 (2002)
Scharstein, D., Szeliski, R.: A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. IJCV47(1), 7–42 (2002)
2002
-
[56]
In: ICCV (2015)
Sedaghat, N., Brox, T.: Unsupervised generation of a viewpoint annotated car dataset from videos. In: ICCV (2015)
2015
-
[57]
Shen, S., Li, L.H., Tan, H., Bansal, M., Rohrbach, A., Chang, K.W., Yao, Z., Keutzer, K.: How much can CLIP benefit vision-and-language tasks? In: ICLR (2022)
2022
-
[58]
In: ICCV (2023)
Shtedritski, A., Rupprecht, C., Vedaldi, A.: What does CLIP know about a red circle? visual prompt engineering for VLMs. In: ICCV (2023)
2023
-
[59]
In: ECCV (2012)
Silberman, N., Hoiem, D., Kohli, P., Fergus, R.: Indoor segmentation and support inference from RGB-D images. In: ECCV (2012)
2012
-
[60]
Siméoni, O., Vo, H.V., Seitzer, M., Baldassarre, F., Oquab, M., Jose, C., Khalidov, V., Szafraniec, M., Yi, S., Ramamonjisoa, M., Massa, F., Haziza, D., Wehrstedt, L., Wang, J., Darcet, T., Moutakanni, T., Sentana, L., Roberts, C., Vedaldi, A., Tolan, J., Brandt, J., Couprie, C., Mairal, J., Jégou, H., Labatut, P., Bojanowski, P.: DINOv3. arXiv preprint a...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[61]
In: CVPR
Sommer, L., Dünkel, O., Theobalt, C., Kortylewski, A.: Common3D: Self- supervised learning of 3D morphable models for common objects in neural feature space. In: CVPR. pp. 6468–6479 (2025)
2025
-
[62]
In: CVPR
Stracke, N., Baumann, S.A., Bauer, K., Fundel, F., Ommer, B.: CleanDIFT: Dif- fusion features without noise. In: CVPR. pp. 117–127 (2025)
2025
-
[63]
In: CVPR
Sun, Y., Huang, Y., Guo, H., Zhao, Y., Wu, R., Yu, Y., Ge, W., Zhang, W.: MISC210K: A large-scale dataset for multi-instance semantic correspondence. In: CVPR. pp. 7121–7130 (2023)
2023
-
[64]
NeurIPS36, 1363–1389 (2023)
Tang, L., Jia, M., Wang, Q., Phoo, C.P., Hariharan, B.: Emergent correspondence from image diffusion. NeurIPS36, 1363–1389 (2023)
2023
-
[65]
In: CVPR
Taniai, T., Sinha, S.N., Sato, Y.: Joint recovery of dense correspondence and coseg- mentation in two images. In: CVPR. pp. 4246–4255 (2016)
2016
-
[66]
Franca: Nested Matryoshka Clustering for Scalable Visual Representation Learning
Venkataramanan, S., Pariza, V., Salehi, M., Knobel, L., Gidaris, S., Ramzi, E., Bursuc, A., Asano, Y.M.: Franca: Nested matryoshka clustering for scalable visual representation learning. arXiv preprint arXiv:2507.14137 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[67]
In: CVPR (2025)
Wandel, K., Wang, H.: SemAlign3D: Semantic correspondence between RGB im- ages through aligning 3D object-class representations. In: CVPR (2025)
2025
-
[68]
In: CVPR
Wang, H., Sridhar, S., Huang, J., Valentin, J., Song, S., Guibas, L.J.: Normalized object coordinate space for category-level 6D object pose and size estimation. In: CVPR. pp. 2642–2651 (2019)
2019
-
[69]
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Wang, W., Gao, Z., Gu, L., Pu, H., Cui, L., Wei, X., Liu, Z., Jing, L., Ye, S., Shao, J., et al.: InternVL3.5: Advancing open-source multimodal models in versatility, reasoning, and efficiency. arXiv preprint arXiv:2508.18265 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[70]
In: ICCV (2023)
Weinzaepfel, P., Lucas, T., Leroy, V., Cabon, Y., Arora, V., Brégier, R., Csurka, G., Antsfeld, L., Chidlovskii, B., Revaud, J.: CroCo v2: Improved cross-view com- pletion pre-training for stereo matching and optical flow. In: ICCV (2023)
2023
-
[71]
In: CVPR
Wu, Y., Lim, J., Yang, M.H.: Online object tracking: A benchmark. In: CVPR. pp. 2411–2418 (2013)
2013
-
[72]
Wu, Y., Kirillov, A., Massa, F., Lo, W.Y., Girshick, R.: Detectron2 (2019), software
2019
-
[73]
In: WACV
Xiang, Y., Mottaghi, R., Savarese, S.: Beyond PASCAL: A benchmark for 3D object detection in the wild. In: WACV. pp. 75–82 (2014) SOCO 23
2014
-
[74]
In: ICCV
Xu, J., Zhang, Y., Peng, J., Ma, W., Jesslen, A., Ji, P., Hu, Q., Zhang, J., Liu, Q., Wang, J., et al.: Animal3D: A comprehensive dataset of 3D animal pose and shape. In: ICCV. pp. 9099–9109 (2023)
2023
-
[75]
Thinking in Space: How Multimodal Large Language Models See, Remember, and Recall Spaces
Yang, J., Yang, S., Gupta, A.W., Han, R., Fei-Fei, L., Xie, S.: Thinking in space: How multimodal large language models see, remember and recall spaces. arXiv preprint arXiv:2412.14171 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[76]
arXiv preprint arXiv:2512.15715 (2025)
Yang, L., Li, S.W., Li, Y., Lei, X., Wang, D., Mohamed, A., Zhao, H., Xu, H.: In pursuit of pixel supervision for visual pre-training. arXiv preprint arXiv:2512.15715 (2025)
-
[77]
arXiv preprint arXiv:2108.12617 (2021)
Yu, H., Xu, Y., Zhang, J., Zhao, W., Guan, Z., Tao, D.: AP-10K: A benchmark for animal pose estimation in the wild. arXiv preprint arXiv:2108.12617 (2021)
-
[78]
In: CVPR (2024)
Yue, X., Ni, Y., Zhang, K., Zheng, T., Liu, R., Zhang, G., Stevens, S., Jiang, D., Ren, W., Sun, Y., Wei, C., Yu, B., Yuan, R., Sun, R., Yin, M., Zheng, B., Yang, Z., Liu, Y., Huang, W., Sun, H., Su, Y., Chen, W.: MMMU: A massive multi-discipline multimodal understanding and reasoning benchmark for expert AGI. In: CVPR (2024)
2024
-
[79]
In: CVPR
Zhang, J., Herrmann, C., Hur, J., Chen, E., Jampani, V., Sun, D., Yang, M.H.: Telling left from right: Identifying geometry-aware semantic correspondence. In: CVPR. pp. 3076–3085 (2024)
2024
-
[80]
NeurIPS36, 45533–45547 (2023)
Zhang, J., Herrmann, C., Hur, J., Polania Cabrera, L., Jampani, V., Sun, D., Yang, M.H.: A tale of two features: Stable Diffusion complements DINO for zero-shot semantic correspondence. NeurIPS36, 45533–45547 (2023)
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.