Explainable deep reinforcement learning reveals energy-efficient control strategies for turbulent drag reduction
Pith reviewed 2026-06-28 17:57 UTC · model grok-4.3
The pith
SHAP attributions from U-net predictors shape MARL rewards to discover a pressure-gated policy that reduces turbulent drag by 34% while using only 0.43% input power.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
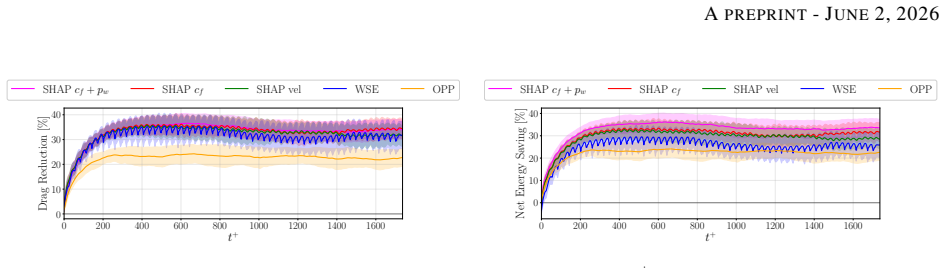
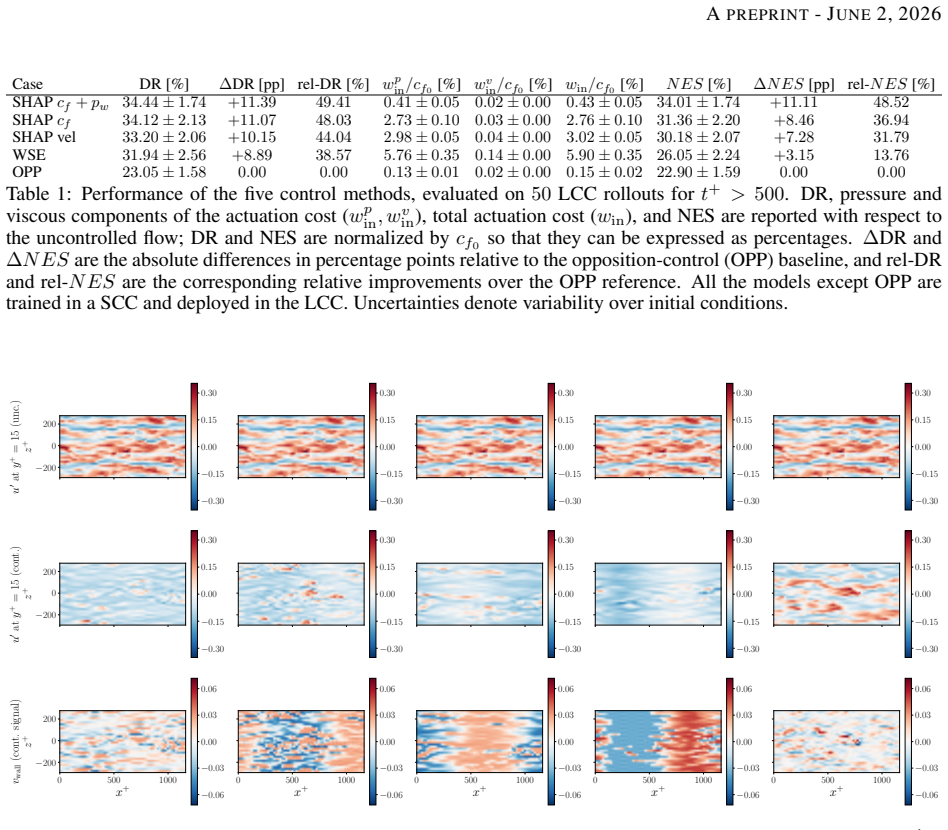
The combined SHAP strategy based on skin-friction coefficient and wall-pressure fluctuations achieves the best overall performance, achieving a DR of 34.44% and a NES of 34.01% with only 0.43% normalized input power. Relative to opposition control, drag reduction and net energy saving increase by 49.41% and 48.52%, respectively. Compared with the direct wall-shear-stress baseline, the proposed strategy simultaneously improves performance while reducing the normalized actuation cost from 5.90% to 0.43%. The energetically efficient policy is consistent with pressure-gated actuation, activating predominantly at near-zero wall pressure, and operates on a temporal timescale comparable to the life
What carries the argument
SHAP attributions from U-nets predicting future skin-friction coefficient and wall-pressure fluctuations, used as the reward signal for multi-agent reinforcement learning agents.
If this is right
- The pressure-gated policy achieves 34.44% drag reduction and 34.01% net energy saving at 0.43% normalized input power.
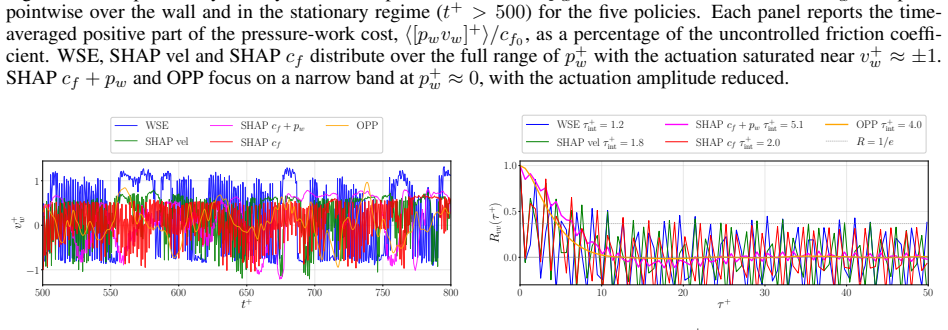
- Actuation occurs predominantly when instantaneous wall pressure is near zero.
- The temporal scale of effective control matches the lifetime of near-wall turbulent structures.
- Normalized actuation cost drops from 5.90% in the direct wall-shear baseline to 0.43% while performance improves.
Where Pith is reading between the lines
- The same SHAP-reward construction could be tested on other canonical wall-bounded flows such as pipe or boundary-layer turbulence to check transferability.
- Laboratory experiments that implement only pressure-based actuation at near-zero crossings would provide a direct physical test of the simulated energy savings.
- Future sensor designs for active flow control might prioritize wall-pressure measurements over shear-stress measurements if the pressure-gated mechanism holds.
Load-bearing premise
The U-nets accurately predict future skin-friction and pressure values from the current flow state so that their SHAP attributions produce a reward signal that genuinely improves the agents' long-term control policy rather than rewarding spurious correlations.
What would settle it
Deploying the trained agents in an independent direct numerical simulation at the same Reynolds number and observing whether the measured drag reduction falls below 30% or the normalized actuation power rises above 1% would falsify the performance claims.
Figures
read the original abstract
We propose a method combining Multi-Agent Deep Reinforcement Learning (MARL) and eXplainable Deep Learning (XDL) to reduce drag in wall-bounded turbulent flows. Taking as a baseline the results of training agents directly targeting wall-shear stress and opposition control, three SHAP-guided approaches are compared. In the first, the reward is computed from SHAP attributions of a U-net predicting the future velocity field; in the second, from SHAP attributions of a U-net predicting the skin-friction coefficient; in the third, from a combination of SHAP attributions of two U-nets predicting the skin-friction coefficient and the wall pressure fluctuations, respectively. The combined SHAP strategy based on skin-friction coefficient and wall-pressure fluctuations achieves the best overall performance, achieving a DR of 34.44% and a NES of 34.01% with only 0.43% normalized input power. Relative to opposition control, drag reduction and net energy saving increase by 49.41% and 48.52%, respectively. Compared with the direct wall-shear-stress baseline, the proposed strategy simultaneously improves performance while reducing the normalized actuation cost from 5.90% to 0.43%. Analysis of the results reveals that the energetically efficient policy is consistent with pressure-gated actuation, activating predominantly at near-zero wall pressure, and operates on a temporal timescale comparable to the lifetime of the near-wall turbulent structures.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a hybrid MARL+XDL framework for turbulent drag reduction in wall-bounded flows. Three SHAP-guided reward formulations are derived from U-nets that predict future velocity, skin-friction coefficient, or wall-pressure fluctuations; the best-performing variant (combined skin-friction and pressure SHAP) is reported to achieve 34.44% drag reduction and 34.01% net energy saving at 0.43% normalized input power, outperforming both opposition control and a direct wall-shear-stress baseline while lowering actuation cost.
Significance. If the U-net predictions generalize and the resulting SHAP rewards produce policies that improve the true Navier-Stokes dynamics, the work would supply both a high-performance, low-power control law and an interpretable link between near-wall pressure and actuation timing. The explicit comparison against two external baselines and the reported energy metrics would constitute a concrete advance in data-driven flow control.
major comments (2)
- [Abstract / Methods (U-net training)] The central performance claims (34.44% DR, 34.01% NES) rest on SHAP attributions obtained from U-nets whose predictive accuracy is never quantified. No test-set MSE, correlation coefficient, or horizon-dependent error is reported for any of the three U-nets, making it impossible to determine whether the attributions identify causally relevant features or merely exploit model error.
- [Results (SHAP-guided strategies)] No ablation is presented that replaces the SHAP-derived reward with the ground-truth future skin-friction or pressure values. Without this control, it remains unclear whether the reported gains over the direct wall-shear baseline arise from the explainability step or simply from using a different reward formulation.
minor comments (2)
- [Abstract] The abstract states relative improvements of 49.41% and 48.52% over opposition control; these percentages should be accompanied by absolute values and statistical uncertainty to allow direct comparison.
- [Abstract] Notation for normalized input power and net energy saving is introduced without an explicit equation; a short definitions subsection would improve reproducibility.
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's comments on our manuscript. We appreciate the constructive feedback and address each major comment below. We propose revisions to strengthen the presentation of the U-net models and clarify the role of the SHAP step.
read point-by-point responses
-
Referee: [Abstract / Methods (U-net training)] The central performance claims (34.44% DR, 34.01% NES) rest on SHAP attributions obtained from U-nets whose predictive accuracy is never quantified. No test-set MSE, correlation coefficient, or horizon-dependent error is reported for any of the three U-nets, making it impossible to determine whether the attributions identify causally relevant features or merely exploit model error.
Authors: We agree that the predictive accuracy of the U-nets must be quantified to support the reliability of the SHAP attributions. In the revised manuscript we will add a dedicated subsection (or appendix) reporting test-set MSE, Pearson correlation coefficients, and horizon-dependent error curves for all three U-nets. These metrics will confirm that the models achieve sufficient accuracy for the attributions to reflect physically relevant features rather than model artifacts. revision: yes
-
Referee: [Results (SHAP-guided strategies)] No ablation is presented that replaces the SHAP-derived reward with the ground-truth future skin-friction or pressure values. Without this control, it remains unclear whether the reported gains over the direct wall-shear baseline arise from the explainability step or simply from using a different reward formulation.
Authors: The direct wall-shear-stress baseline already employs instantaneous measurements as the reward. Using ground-truth future skin-friction or pressure as a reward would require an oracle unavailable in any practical online control setting and would therefore not constitute a fair ablation of the SHAP component. The SHAP formulation is deliberately chosen to extract interpretable, predictive features from the U-net outputs. In the revision we will expand the discussion to explicitly contrast the instantaneous baseline with the predictive SHAP approach and will add a limited comparison that replaces SHAP with the raw U-net predictions (without attribution) to isolate the contribution of the explainability step. revision: partial
Circularity Check
No significant circularity; results measured against external simulation baselines
full rationale
The derivation trains separate U-nets on flow data to predict future skin-friction or pressure, extracts SHAP attributions as a reward signal, and optimizes MARL policies against that reward. Final DR and NES percentages are obtained by running the resulting policies in the true Navier-Stokes solver and comparing to independent external controls (opposition control, direct wall-shear targeting). No equation or performance metric is defined in terms of the fitted reward itself, no self-citation supplies a uniqueness theorem, and no prediction is statistically forced by construction. The chain therefore remains externally falsifiable.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption U-nets trained on flow data can produce accurate short-term predictions of skin-friction coefficient and wall-pressure fluctuations from instantaneous wall measurements.
Reference graph
Works this paper leans on
-
[1]
and Brunton, S
Vinuesa, R. and Brunton, S. L. , title =. Nat. Comput. Sci. , volume =. 2022 , doi =
2022
-
[2]
The autonomous cycle of near-wall turbulence , journal =
Jim. The autonomous cycle of near-wall turbulence , journal =. 1999 , doi =
1999
-
[3]
, title =
Waleffe, F. , title =. Phys. Fluids , volume =. 1997 , doi =
1997
-
[4]
Coherent structures in wall-bounded turbulence , journal =
Jim. Coherent structures in wall-bounded turbulence , journal =. 2018 , doi =
2018
-
[5]
and Moin, P
Choi, H. and Moin, P. and Kim, J. , title =. J. Fluid Mech. , volume =. 1994 , doi =
1994
-
[6]
and Rabault, J
Guastoni, L. and Rabault, J. and Schlatter, P. and Azizpour, H. and Vinuesa, R. , title =. Eur. Phys. J. E , volume =. 2023 , doi =
2023
-
[7]
and Liu, Z
Sonoda, T. and Liu, Z. and Itoh, T. and Hasegawa, Y. , title =. J. Fluid Mech. , volume =. 2023 , doi =
2023
-
[8]
and Rabault, J
Vignon, C. and Rabault, J. and Vasanth, J. and Alc. Effective control of two-dimensional. Phys. Fluids , volume =. 2023 , doi =
2023
-
[9]
Font, B. and Alc. Deep reinforcement learning for active flow control in a turbulent separation bubble , journal =. 2025 , doi =
2025
-
[10]
Flow control of three-dimensional cylinders transitioning to turbulence via multi-agent reinforcement learning , journal =
Su. Flow control of three-dimensional cylinders transitioning to turbulence via multi-agent reinforcement learning , journal =. 2025 , doi =
2025
-
[11]
and Hoyas, S
Cremades, A. and Hoyas, S. and Deshpande, R. and Quintero, P. and Lellep, M. and Lee, W. J. and Monty, J. P. and Hutchins, N. and Linkmann, M. and Marusic, I. and Vinuesa, R. , title =. Nat. Commun. , volume =. 2024 , doi =
2024
-
[12]
and Hoyas, S
Cremades, A. and Hoyas, S. and Vinuesa, R. , title =. Nat. Commun. , volume =. 2025 , doi =
2025
-
[13]
and Hoyas, S
Cremades, A. and Hoyas, S. and Vinuesa, R. , title =. Int. J. Heat Fluid Flow , volume =. 2025 , doi =
2025
-
[14]
and Cremades, A
Molina-Casino, S. and Cremades, A. and Hoyas, S. and Cardesa, J. I. and Chedevergne, F. and Vinuesa, R. , title =. Eur. J. Mech. B/Fluids , year =
-
[15]
Lundberg, S. M. and Lee, S.-I. , title =. Adv. Neural Inf. Process. Syst. , volume =
-
[16]
Vinuesa, R. and Brunton, S. L. and Mengaldo, G. , title =. arXiv preprint arXiv:2601.05525 , year =
-
[17]
and Rabault, J
Tonti, F. and Rabault, J. and Vinuesa, R. , title =. J. Comput. Phys. , pages =. 2025 , doi =
2025
-
[18]
Tonti, F. and Vinuesa, R. , title =. arXiv preprint arXiv:2510.25679 , year =
-
[19]
and Rabault, J
Tonti, F. and Rabault, J. and Vinuesa, R. , title =. Advances in Heat Transfer , publisher =
-
[20]
and Matteucci, L
Amico, E. and Matteucci, L. and Cafiero, G. , title =. Phys. Fluids , volume =. 2025 , doi =
2025
-
[21]
An Explainable Deep Learning for Data-Driven Turbulence Model Feature Discovery , year=
Alhafiz, Muhammad Ridho and Zuhal, Lavi Rizki and Dung, Duong Viet and Palar, Pramudita Satria , journal=. An Explainable Deep Learning for Data-Driven Turbulence Model Feature Discovery , year=
-
[22]
and Benedikt, N
Hoyas, S. and Benedikt, N. and Cremades, A. and Vinuesa, R. , title =. Phys. Rev. Fluids , volume =. 2025 , doi =
2025
-
[23]
Explainable deep learning reveals the physical mechanisms behind the turbulent kinetic energy equation , journal =
Alc. Explainable deep learning reveals the physical mechanisms behind the turbulent kinetic energy equation , journal =
-
[24]
The minimal flow unit in near-wall turbulence , journal =
Jim. The minimal flow unit in near-wall turbulence , journal =. 1991 , doi =
1991
-
[25]
and Cremades, A
Beneitez, M. and Cremades, A. and Guastoni, L. and Vinuesa, R. , title =. 2025 , journal =
2025
-
[26]
and Fukagata, K
Kametani, Y. and Fukagata, K. , title =. J. Fluid Mech. , volume =. 2011 , doi =
2011
-
[27]
Burns, K. J. and Vasil, G. M. and Oishi, J. S. and Lecoanet, D. and Brown, B. P. , title =. Phys. Rev. Research , volume =. 2020 , doi =
2020
-
[28]
Ascher, U. M. , title =. Numer. Algorithms , volume =
-
[29]
and van Hoof, H
Fujimoto, S. and van Hoof, H. and Meger, D. , title =. Proc. 35th Int. Conf. Machine Learning , pages =. 2018 , publisher =
2018
-
[30]
and Hill, A
Raffin, A. and Hill, A. and Gleave, A. and Kanervisto, A. and Ernestus, M. and Dormann, N. , title =. J. Mach. Learn. Res. , volume =
-
[31]
and Janizek, J
Erion, G. and Janizek, J. D. and Sturmfels, P. and Lundberg, S. M. and Lee, S.-I. , title =. Nat. Mach. Intell. , volume =. 2021 , doi =
2021
-
[32]
, title =
Bewley, Thomas R. , title =. J. Fluid Mech. , volume =. 2009 , doi =
2009
-
[33]
and Wine, David and Holloway, Brian and Chung, Daniel and Smits, Alexander J
Marusic, Ivan and Chandran, Dileep and Rouhi, Amirreza and Fu, Matt K. and Wine, David and Holloway, Brian and Chung, Daniel and Smits, Alexander J. , title =. Nat. Commun. , volume =. 2021 , doi =
2021
-
[34]
Gatti, Davide and Quadrio, Maurizio , title =. J. Fluid Mech. , volume =. 2016 , doi =
2016
-
[35]
Fukagata, Koji and Iwamoto, Kaoru and Hasegawa, Yosuke , title =. Annu. Rev. Fluid Mech. , volume =. 2024 , doi =
2024
-
[36]
Causal features in turbulent channel flow , journal =
Osawa, Kosuke and Jim. Causal features in turbulent channel flow , journal =. 2024 , doi =
2024
-
[37]
Methods for interpreting and understanding deep neural networks , journal =
Montavon, Gr. Methods for interpreting and understanding deep neural networks , journal =. 2018 , doi =
2018
-
[38]
Multiscale analysis of the topological invariants in the logarithmic region of turbulent channels at a friction
Lozano-Dur. Multiscale analysis of the topological invariants in the logarithmic region of turbulent channels at a friction. J. Fluid Mech. , volume =. 2021 , doi =
2021
-
[39]
and Noack, Bernd R
Brunton, Steven L. and Noack, Bernd R. and Koumoutsakos, Petros , title =. Annu. Rev. Fluid Mech. , volume =. 2020 , doi =
2020
-
[40]
Artificial neural networks trained through deep reinforcement learning discover control strategies for active flow control , journal =
Rabault, Jean and Kuchta, Miroslav and Jensen, Atle and R. Artificial neural networks trained through deep reinforcement learning discover control strategies for active flow control , journal =. 2019 , doi =
2019
-
[41]
Quadrio, Maurizio and Ricco, Pierre , title =. J. Fluid Mech. , volume =. 2004 , doi =
2004
-
[42]
Quadrio, Maurizio , title =. Phil. Trans. R. Soc. A , volume =. 2011 , doi =
2011
-
[43]
and Monkewitz, Peter A
Marusic, Ivan and McKeon, Beverley J. and Monkewitz, Peter A. and Nagib, Hassan M. and Smits, Alexander J. and Sreenivasan, Katepalli R. , title =. Phys. Fluids , volume =. 2010 , doi =
2010
-
[44]
Hasegawa, Yosuke and Quadrio, Maurizio and Frohnapfel, Bettina , title =. J. Fluid Mech. , volume =. 2014 , doi =
2014
-
[45]
and Namkoong, Hongseok and Farhadi, Ali and Carmon, Yair and Kornblith, Simon and Schmidt, Ludwig , title =
Wortsman, Mitchell and Ilharco, Gabriel and Gadre, Samir Ya and Roelofs, Rebecca and Gontijo-Lopes, Raphael and Morcos, Ari S. and Namkoong, Hongseok and Farhadi, Ali and Carmon, Yair and Kornblith, Simon and Schmidt, Ludwig , title =. Proceedings of the 39th International Conference on Machine Learning , series =. 2022 , url =
2022
-
[46]
R. Vinuesa and S. L. Brunton. Enhancing computational fluid dynamics with machine learning. Nat. Comput. Sci., 2: 0 358--366, 2022. doi:10.1038/s43588-022-00264-7
-
[47]
F. Waleffe. On a self-sustaining process in shear flows. Phys. Fluids, 9: 0 883--900, 1997. doi:10.1063/1.869185
-
[48]
J. Jim é nez and A. Pinelli. The autonomous cycle of near-wall turbulence. J. Fluid Mech., 389: 0 335--359, 1999. doi:10.1017/S0022112099005066
-
[49]
J. Jim é nez. Coherent structures in wall-bounded turbulence. J. Fluid Mech., 842: 0 P1, 2018. doi:10.1017/jfm.2018.144
-
[50]
H. Choi, P. Moin, and J. Kim. Active turbulence control for drag reduction in wall-bounded flows. J. Fluid Mech., 262: 0 75--110, 1994. doi:10.1017/S0022112094000431
-
[51]
Ivan Marusic, Beverley J. McKeon, Peter A. Monkewitz, Hassan M. Nagib, Alexander J. Smits, and Katepalli R. Sreenivasan. Wall-bounded turbulent flows at high Reynolds numbers: recent advances and key issues. Phys. Fluids, 22 0 (6): 0 065103, 2010. doi:10.1063/1.3453711
-
[52]
Thomas R. Bewley. A fundamental limit on the balance of power in a transpiration-controlled channel flow. J. Fluid Mech., 632: 0 443--446, 2009. doi:10.1017/S0022112008004886
-
[53]
Critical assessment of turbulent drag reduction through spanwise wall oscillations
Maurizio Quadrio and Pierre Ricco. Critical assessment of turbulent drag reduction through spanwise wall oscillations. J. Fluid Mech., 521: 0 251--271, 2004. doi:10.1017/S0022112004001855
-
[54]
Drag reduction in turbulent boundary layers by in-plane wall motion
Maurizio Quadrio. Drag reduction in turbulent boundary layers by in-plane wall motion. Phil. Trans. R. Soc. A, 369: 0 1428--1442, 2011. doi:10.1098/rsta.2010.0366
-
[55]
Turbulent drag reduction by streamwise traveling waves of wall-normal forcing
Koji Fukagata, Kaoru Iwamoto, and Yosuke Hasegawa. Turbulent drag reduction by streamwise traveling waves of wall-normal forcing. Annu. Rev. Fluid Mech., 56: 0 69--90, 2024. doi:10.1146/annurev-fluid-120720-021445
-
[56]
Reynolds -number dependence of turbulent skin-friction drag reduction induced by spanwise forcing
Davide Gatti and Maurizio Quadrio. Reynolds -number dependence of turbulent skin-friction drag reduction induced by spanwise forcing. J. Fluid Mech., 802: 0 553--558, 2016. doi:10.1017/jfm.2016.485
-
[57]
P. Su á rez, F. Alc á ntara- Á vila, J. Rabault, A. Mir o , B. Font, O. Lehmkuhl, and R. Vinuesa. Flow control of three-dimensional cylinders transitioning to turbulence via multi-agent reinforcement learning. Commun. Eng., 4: 0 113, 2025. doi:10.1038/s44172-025-00446-x
-
[58]
C. Vignon, J. Rabault, J. Vasanth, F. Alc á ntara- Á vila, M. Mortensen, and R. Vinuesa. Effective control of two-dimensional R ayleigh-- B \'enard convection: invariant multi-agent reinforcement learning is all you need. Phys. Fluids, 35: 0 065146, 2023. doi:10.1063/5.0153181
-
[59]
B. Font, F. Alc á ntara- Á vila, J. Rabault, R. Vinuesa, and O. Lehmkuhl. Deep reinforcement learning for active flow control in a turbulent separation bubble. Nat. Commun., 16: 0 1422, 2025. doi:10.1038/s41467-025-56408-6
-
[60]
F. Tonti, J. Rabault, and R. Vinuesa. Navigation in a simplified urban flow through deep reinforcement learning. J. Comput. Phys., page 114194, 2025 a . doi:10.1016/j.jcp.2025.114194
-
[61]
Tonti, J
F. Tonti, J. Rabault, and R. Vinuesa. Deep reinforcement learning for combustion applications. In Advances in Heat Transfer. Elsevier, 2025 b
2025
-
[62]
L. Guastoni, J. Rabault, P. Schlatter, H. Azizpour, and R. Vinuesa. Deep reinforcement learning for turbulent drag reduction in channel flows. Eur. Phys. J. E, 46: 0 27, 2023. doi:10.1140/epje/s10189-023-00285-8
-
[63]
T. Sonoda, Z. Liu, T. Itoh, and Y. Hasegawa. Reinforcement learning of control strategies for reducing skin friction drag in a fully developed turbulent channel flow. J. Fluid Mech., 960: 0 A30, 2023. doi:10.1017/jfm.2023.147
-
[64]
S. M. Lundberg and S.-I. Lee. A unified approach to interpreting model predictions. Adv. Neural Inf. Process. Syst., 30, 2017
2017
-
[65]
A. Cremades, S. Hoyas, R. Deshpande, P. Quintero, M. Lellep, W. J. Lee, J. P. Monty, N. Hutchins, M. Linkmann, I. Marusic, and R. Vinuesa. Identifying regions of importance in wall-bounded turbulence through explainable deep learning. Nat. Commun., 15: 0 3864, 2024. doi:10.1038/s41467-024-47954-6
-
[66]
A. Cremades, S. Hoyas, and R. Vinuesa. Classically studied coherent structures only paint a partial picture of wall-bounded turbulence. Nat. Commun., 16: 0 10189, 2025 a . doi:https://doi.org/10.1038/s41467-025-65199-9
-
[67]
A. Cremades, S. Hoyas, and R. Vinuesa. Additive-feature-attribution methods: a review on explainable artificial intelligence for fluid dynamics and heat transfer. Int. J. Heat Fluid Flow, 112: 0 109662, 2025 b . doi:10.1016/j.ijheatfluidflow.2024.109662
-
[68]
Adri a n Lozano-Dur á n, Markus Holzner, and Javier Jim é nez. Multiscale analysis of the topological invariants in the logarithmic region of turbulent channels at a friction Reynolds number of 932 . J. Fluid Mech., 911: 0 A48, 2021. doi:10.1017/jfm.2020.1007
-
[69]
Causal features in turbulent channel flow
Kosuke Osawa and Javier Jim é nez. Causal features in turbulent channel flow. J. Fluid Mech., 1000: 0 A4, 2024. doi:10.1017/jfm.2024.760
-
[70]
S. Hoyas, N. Benedikt, A. Cremades, and R. Vinuesa. Deep-learning-based assessment of skin friction in wall-bounded turbulence. Phys. Rev. Fluids, 10 0 (6): 0 L062601, 2025. doi:10.1103/b36b-m5hd
-
[71]
Improving turbulence control through explainable deep learning
M. Beneitez, A. Cremades, L. Guastoni, and R. Vinuesa. Improving turbulence control through explainable deep learning. arXiv preprint arXiv:2504.02354, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[72]
Y. Kametani and K. Fukagata. Direct numerical simulation of spatially developing turbulent boundary layers with uniform blowing or suction. J. Fluid Mech., 681: 0 154--172, 2011. doi:10.1017/jfm.2011.219
-
[73]
Fu, David Wine, Brian Holloway, Daniel Chung, and Alexander J
Ivan Marusic, Dileep Chandran, Amirreza Rouhi, Matt K. Fu, David Wine, Brian Holloway, Daniel Chung, and Alexander J. Smits. An energy-efficient pathway to turbulent drag reduction. Nat. Commun., 12: 0 5805, 2021. doi:10.1038/s41467-021-26128-8
-
[74]
J. Jim é nez and P. Moin. The minimal flow unit in near-wall turbulence. J. Fluid Mech., 225: 0 213--240, 1991. doi:10.1017/S0022112091002033
-
[75]
K. J. Burns, G. M. Vasil, J. S. Oishi, D. Lecoanet, and B. P. Brown. Dedalus: a flexible framework for numerical simulations with spectral methods. Phys. Rev. Research, 2 0 (2): 0 023068, 2020. doi:10.1103/PhysRevResearch.2.023068
-
[76]
U. M. Ascher. Stabilization of invariants of discretized differential systems. Numer. Algorithms, 14: 0 1--24, 1997
1997
-
[77]
Fujimoto, H
S. Fujimoto, H. van Hoof, and D. Meger. Addressing function approximation error in actor-critic methods. In Proc. 35th Int. Conf. Machine Learning, pages 1587--1596. PMLR, 2018
2018
-
[78]
Raffin, A
A. Raffin, A. Hill, A. Gleave, A. Kanervisto, M. Ernestus, and N. Dormann. Stable- B aselines3: reliable reinforcement learning implementations. J. Mach. Learn. Res., 22 0 (268): 0 1--8, 2021
2021
-
[79]
Numerical simulation of turbulent duct flows with constant power input
Yosuke Hasegawa, Maurizio Quadrio, and Bettina Frohnapfel. Numerical simulation of turbulent duct flows with constant power input. J. Fluid Mech., 750: 0 191--209, 2014. doi:10.1017/jfm.2014.269
-
[80]
Morcos, Hongseok Namkoong, Ali Farhadi, Yair Carmon, Simon Kornblith, and Ludwig Schmidt
Mitchell Wortsman, Gabriel Ilharco, Samir Ya Gadre, Rebecca Roelofs, Raphael Gontijo-Lopes, Ari S. Morcos, Hongseok Namkoong, Ali Farhadi, Yair Carmon, Simon Kornblith, and Ludwig Schmidt. Model soups: averaging weights of multiple fine-tuned models improves accuracy without increasing inference time. In Proceedings of the 39th International Conference on...
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.