Motion Planning in Dynamic Environments: A Survey from Classical to Modern Methods
Pith reviewed 2026-06-28 14:42 UTC · model grok-4.3
The pith
Motion planning methods in dynamic environments fall into five categories that address both classical techniques and modern learning approaches.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
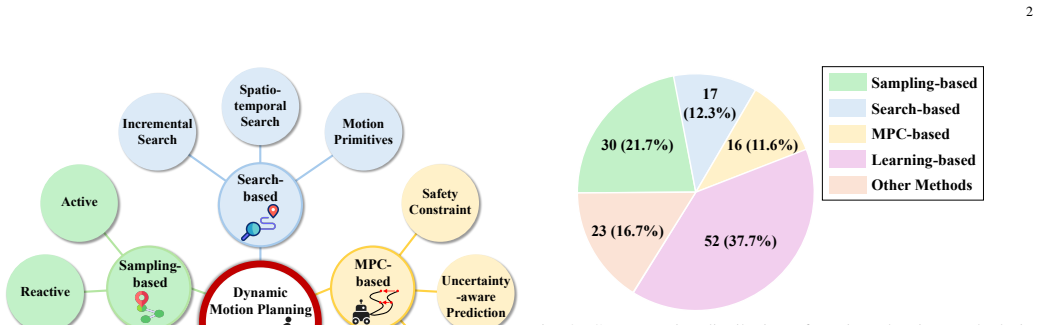
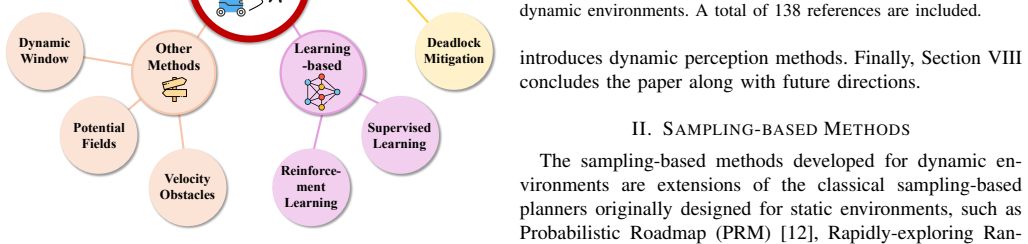
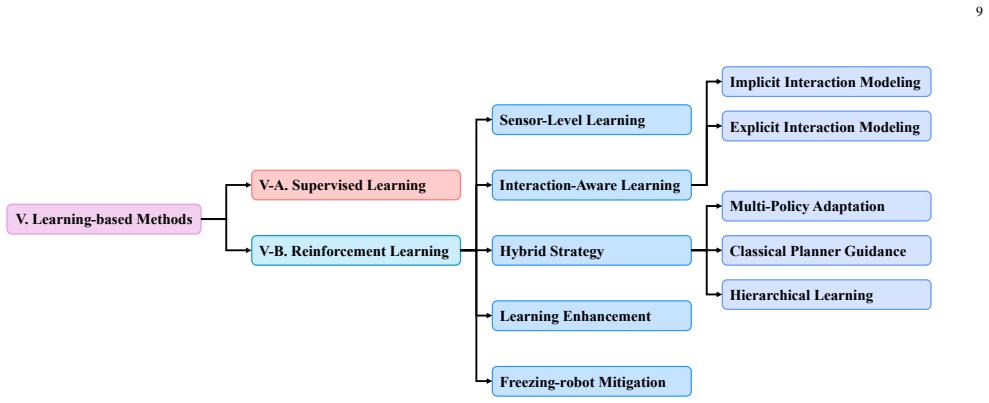
The paper establishes a structured taxonomy for motion planning in dynamic environments by categorizing methods into five groups—sampling, graph search, model predictive control, learning, and classical local planning—while analyzing their principles, strengths, and limitations in the presence of moving obstacles and related challenges.
What carries the argument
The five-category taxonomy based on core concepts of sampling, graph search, model predictive control, learning, and local planning approaches including velocity obstacles, potential fields and dynamic windows.
If this is right
- Readers gain a structured understanding of how different methods handle prediction uncertainty and human-robot interaction.
- The survey identifies the freezing robot problem as a key challenge unique to dynamic settings.
- Integration of dynamic perception techniques with planning is necessary for effective navigation among moving obstacles.
Where Pith is reading between the lines
- New algorithms could be developed by combining elements from multiple categories to address gaps in handling uncertainty.
- This taxonomy might serve as a basis for comparing performance across methods in standardized dynamic test environments.
Load-bearing premise
The 138 papers and five-category taxonomy together represent the field comprehensively without major omissions or misclassifications.
What would settle it
A significant motion planning technique published between 2015 and 2025 that cannot be classified into any of the five categories or is missing from the reviewed works would challenge the survey's completeness.
Figures





read the original abstract
Motion planning in dynamic environments requires robots to continuously adapt their paths in response to environmental changes for safe and uninterrupted navigation. While many surveys have reviewed planning in static settings, systematic reviews focused on dynamic environments remain limited. This paper presents a comprehensive survey of 138 works, primarily published between 2015 and 2025, spanning both classical and learning-based approaches. The motion planning methods are grouped into five categories based on the concepts of sampling, graph search, model predictive control, learning, and additional classical local planning approaches, including velocity obstacles, potential fields and dynamic windows. The learning techniques include supervised learning and reinforcement learning. We also discuss the role of dynamic perception in motion planning, covering techniques for detecting and modeling moving obstacles using cameras, LiDAR, and event-based sensors. The survey analyzes the principles, strengths, and limitations of each method, with particular attention to challenges unique to dynamic environments, such as prediction uncertainty, human-robot interaction, and the freezing robot problem. The survey provides researchers with a structured understanding of motion planning methods in dynamic environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a survey of 138 works (mostly 2015–2025) on motion planning in dynamic environments. It organizes methods into five categories—sampling-based, graph search, model predictive control, learning (supervised and reinforcement), and classical local planners (velocity obstacles, potential fields, dynamic window approach)—while also addressing dynamic perception with cameras, LiDAR, and event cameras, and analyzing strengths, limitations, and dynamic-specific challenges such as prediction uncertainty, human-robot interaction, and the freezing robot problem.
Significance. If the taxonomy and coverage prove accurate, the survey would be useful for the robotics community by consolidating recent literature on dynamic settings (where static surveys dominate) and explicitly linking perception to planning while highlighting open issues. The explicit treatment of learning methods alongside classical ones and the focus on practical challenges provide a structured entry point for researchers.
major comments (1)
- [Abstract and categorization sections] The central claim of a representative, non-overlapping five-category taxonomy is load-bearing for the survey's value. The manuscript (Abstract and categorization sections) presents the groupings as distinct but provides no explicit protocol or discussion for assigning hybrid methods (e.g., RL-augmented sampling planners or learned cost functions inside MPC), which have become common since 2015. Without such handling, overlaps or omissions cannot be ruled out, weakening the assertion of balanced coverage.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the taxonomy. We address the major comment below.
read point-by-point responses
-
Referee: [Abstract and categorization sections] The central claim of a representative, non-overlapping five-category taxonomy is load-bearing for the survey's value. The manuscript (Abstract and categorization sections) presents the groupings as distinct but provides no explicit protocol or discussion for assigning hybrid methods (e.g., RL-augmented sampling planners or learned cost functions inside MPC), which have become common since 2015. Without such handling, overlaps or omissions cannot be ruled out, weakening the assertion of balanced coverage.
Authors: We agree that the manuscript does not include an explicit protocol for assigning hybrid methods, and that this omission weakens the claim of a non-overlapping taxonomy. In the revised manuscript we will add a new subsection (tentatively 2.6) immediately after the five-category overview that states the classification rule: each method is assigned to the category matching its dominant algorithmic paradigm, with hybrid components noted and cross-referenced to the secondary category. Examples of RL-augmented sampling and learned-cost MPC will be provided, together with a short table listing the 138 surveyed papers that contain hybrid elements and their assigned primary category. This addition will be referenced from the abstract and from the introduction. revision: yes
Circularity Check
No circularity: descriptive survey with no derivations or predictions
full rationale
This paper is a literature review that organizes 138 existing works into five categories (sampling, graph search, MPC, learning, classical local). It contains no equations, fitted parameters, predictions, uniqueness theorems, or first-principles derivations. The taxonomy is an organizational framework chosen by the authors, not derived from or equivalent to any input data or self-citation. No load-bearing step reduces to a self-citation chain or by-construction equivalence. The paper is self-contained as a descriptive survey against external benchmarks (the cited literature).
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Socially aware motion planning with deep reinforcement learning,
Y . F. Chen, M. Everett, M. Liu, and J. P. How, “Socially aware motion planning with deep reinforcement learning,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1343–1350, 2017
2017
-
[2]
Path re-planning design of a cobot in a dynamic environment based on current obstacle configuration,
C.-C. Lee and K.-T. Song, “Path re-planning design of a cobot in a dynamic environment based on current obstacle configuration,”IEEE Robotics and Automation Letters, vol. 8, no. 3, pp. 1183–1190, 2023
2023
-
[3]
FAPP: Fast and adaptive perception and planning for uavs in dynamic cluttered environments,
M. Lu, X. Fan, H. Chen, and P. Lu, “FAPP: Fast and adaptive perception and planning for uavs in dynamic cluttered environments,” IEEE Transactions on Robotics, vol. 41, pp. 871–886, 2024
2024
-
[4]
Hierarchical motion plan- ning for autonomous vehicles in unstructured dynamic environments,
Y . Qi, B. He, R. Wang, L. Wang, and Y . Xu, “Hierarchical motion plan- ning for autonomous vehicles in unstructured dynamic environments,” IEEE Robotics and Automation Letters, vol. 8, no. 2, pp. 496–503, 2023
2023
-
[5]
Sampling-based methods for motion planning with constraints,
Z. Kingston, M. Moll, and L. E. Kavraki, “Sampling-based methods for motion planning with constraints,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 1, no. 1, pp. 159–185, 2018
2018
-
[6]
Asymptotically optimal sampling- based motion planning methods,
J. D. Gammell and M. P. Strub, “Asymptotically optimal sampling- based motion planning methods,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 4, no. 1, pp. 295–318, 2021
2021
-
[7]
Sampling-based motion planning: A comparative review,
A. Orthey, C. Chamzas, and L. E. Kavraki, “Sampling-based motion planning: A comparative review,”Annual Review of Control, Robotics, and Autonomous Systems, vol. 7, 2023
2023
-
[8]
Path planning techniques for mobile robots: Review and prospect,
L. Liu, X. Wang, X. Yang, H. Liu, J. Li, and P. Wang, “Path planning techniques for mobile robots: Review and prospect,”Expert Systems with Applications, vol. 227, p. 120254, 2023
2023
-
[9]
A review on motion planning and obstacle avoidance approaches in dynamic environments,
F. Kamil, S. Tang, W. Khaksar, N. Zulkifli, and S. A. Ahmad, “A review on motion planning and obstacle avoidance approaches in dynamic environments,”Advances in Robotics & Automation, vol. 4, no. 2, pp. 134–142, 2015
2015
-
[10]
A survey of robotic motion plan- ning in dynamic environments,
M. Mohanan and A. Salgoankar, “A survey of robotic motion plan- ning in dynamic environments,”Robotics and Autonomous Systems, vol. 100, pp. 171–185, 2018
2018
-
[11]
Review on motion planning of robotic manipulator in dynamic environments,
J. Liu, H. J. Yap, and A. S. M. Khairuddin, “Review on motion planning of robotic manipulator in dynamic environments,”Journal of Sensors, vol. 2024, no. 1, p. 5969512, 2024
2024
-
[12]
Prob- abilistic roadmaps for path planning in high-dimensional configuration spaces,
L. E. Kavraki, P. Svestka, J.-C. Latombe, and M. H. Overmars, “Prob- abilistic roadmaps for path planning in high-dimensional configuration spaces,”IEEE Transactions on Robotics and Automation, vol. 12, no. 4, pp. 566–580, 1996
1996
-
[13]
Randomized kinodynamic plan- ning,
S. M. LaValle and J. J. Kuffner Jr, “Randomized kinodynamic plan- ning,”International Journal of Robotics Research, vol. 20, no. 5, pp. 378–400, 2001
2001
-
[14]
Sampling-based algorithms for optimal motion planning,
S. Karaman and E. Frazzoli, “Sampling-based algorithms for optimal motion planning,”International Journal of Robotics Research, vol. 30, no. 7, pp. 846–894, 2011
2011
-
[15]
Real-time randomized path planning for robot navigation,
J. Bruce and M. Veloso, “Real-time randomized path planning for robot navigation,” inIEEE International Conference on Intelligent Robots and Systems, vol. 3, pp. 2383–2388, 2002
2002
-
[16]
Replanning with RRTs,
D. Ferguson, N. Kalra, and A. Stentz, “Replanning with RRTs,” in IEEE International Conference on Robotics and Automation, pp. 1243– 1248, 2006
2006
-
[17]
Reactive deformation roadmaps: motion planning of multiple robots in dynamic environ- ments,
R. Gayle, A. Sud, M. C. Lin, and D. Manocha, “Reactive deformation roadmaps: motion planning of multiple robots in dynamic environ- ments,” inIEEE International Conference on Robotics and Automation, pp. 3777–3783, 2007
2007
-
[18]
Elastic roadmaps: motion generation for au- tonomous mobile manipulation,
Y . Yang and O. Brock, “Elastic roadmaps: motion generation for au- tonomous mobile manipulation,”Autonomous Robots, vol. 28, pp. 113– 130, 2010
2010
-
[19]
Elastic bands: Connecting path planning and control,
S. Quinlan and O. Khatib, “Elastic bands: Connecting path planning and control,” inIEEE International Conference on Robotics and Automation, pp. 802–807, 1993
1993
-
[20]
Multipartite RRTs for rapid replanning in dynamic environments,
M. Zucker, J. Kuffner, and M. Branicky, “Multipartite RRTs for rapid replanning in dynamic environments,” inIEEE International Conference on Robotics and Automation, pp. 1603–1609, 2007
2007
-
[21]
Lazy reconfiguration forest (LRF)-an approach for motion planning with multiple tasks in dynamic environments,
R. Gayle, K. R. Klingler, and P. G. Xavier, “Lazy reconfiguration forest (LRF)-an approach for motion planning with multiple tasks in dynamic environments,” inIEEE International Conference on Robotics and Automation, pp. 1316–1323, 2007
2007
-
[22]
Greedy but safe replanning under kin- odynamic constraints,
K. E. Bekris and L. E. Kavraki, “Greedy but safe replanning under kin- odynamic constraints,” inIEEE International Conference on Robotics and Automation, pp. 704–710, 2007
2007
-
[23]
RRT X: Asymptotically optimal single-query sampling-based motion planning with quick replanning,
M. Otte and E. Frazzoli, “RRT X: Asymptotically optimal single-query sampling-based motion planning with quick replanning,”International Journal of Robotics Research, vol. 35, no. 7, pp. 797–822, 2016
2016
-
[24]
Horizon-based lazy optimal RRT for fast, efficient replanning in dynamic environment,
Y . Chen, Z. He, and S. Li, “Horizon-based lazy optimal RRT for fast, efficient replanning in dynamic environment,”Autonomous Robots, vol. 43, no. 8, pp. 2271–2292, 2019
2019
-
[25]
An efficient RRT cache method in dynamic environments for path planning,
C. Yuan, G. Liu, W. Zhang, and X. Pan, “An efficient RRT cache method in dynamic environments for path planning,”Robotics and Autonomous Systems, vol. 131, p. 103595, 2020
2020
-
[26]
SMART: Self- morphing adaptive replanning tree,
Z. Shen, J. P. Wilson, S. Gupta, and R. Harvey, “SMART: Self- morphing adaptive replanning tree,”IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7312–7319, 2023
2023
-
[27]
Dynamic risk tolerance: Motion planning by balancing short-term and long-term stochastic dynamic predictions,
H.-T. L. Chiang, B. HomChaudhuri, A. P. Vinod, M. Oishi, and L. Tapia, “Dynamic risk tolerance: Motion planning by balancing short-term and long-term stochastic dynamic predictions,” inIEEE International Conference on Robotics and Automation, pp. 3762–3769, 2017
2017
-
[28]
Human- aware path planning with improved virtual doppler method in highly dynamic environments,
K. Cai, W. Chen, C. Wang, S. Song, and M. Q.-H. Meng, “Human- aware path planning with improved virtual doppler method in highly dynamic environments,”IEEE Transactions on Automation Science and Engineering, vol. 20, no. 2, pp. 1304–1321, 2023
2023
-
[29]
Distributionally robust risk map for learning-based motion planning and control: A semidefinite program- ming approach,
A. Hakobyan and I. Yang, “Distributionally robust risk map for learning-based motion planning and control: A semidefinite program- ming approach,”IEEE Transactions on Robotics, vol. 39, no. 1, pp. 718–737, 2023
2023
-
[30]
Multi-Risk-RRT: An efficient motion planning algorithm for robotic autonomous luggage trolley collection at airports,
Z. Sun, B. Lei, P. Xie, F. Liu, J. Gao, Y . Zhang, and J. Wang, “Multi-Risk-RRT: An efficient motion planning algorithm for robotic autonomous luggage trolley collection at airports,”IEEE Transactions on Intelligent Vehicles, vol. 9, no. 2, pp. 3450–3463, 2024
2024
-
[31]
Fast asymptotically optimal path planning in dynamic, uncertain environments,
L. Huang and X. Jing, “Fast asymptotically optimal path planning in dynamic, uncertain environments,” inIEEE/RSJ International Confer- ence on Intelligent Robots and Systems, pp. 2846–2852, 2023
2023
-
[32]
Asymptotically optimal lazy lifelong sampling- based algorithm for efficient motion planning in dynamic environ- ments,
L. Huang and X. Jing, “Asymptotically optimal lazy lifelong sampling- based algorithm for efficient motion planning in dynamic environ- ments,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 8861–8867, 2024
2024
-
[33]
Real-time fast marching tree for mobile robot motion planning in dynamic environments,
J. Silveira, K. Cabral, S. Givigi, and J. A. Marshall, “Real-time fast marching tree for mobile robot motion planning in dynamic environments,” inIEEE International Conference on Robotics and Automation, pp. 7837–7843, 2023
2023
-
[34]
Fast marching tree: A fast marching sampling-based method for optimal motion plan- ning in many dimensions,
L. Janson, E. Schmerling, A. Clark, and M. Pavone, “Fast marching tree: A fast marching sampling-based method for optimal motion plan- ning in many dimensions,”International Journal of Robotics Research, vol. 34, no. 7, pp. 883–921, 2015
2015
-
[35]
Online and robust intermittent motion planning in dynamic and changing environments,
Z. Xu, G. P. Kontoudis, and K. G. Vamvoudakis, “Online and robust intermittent motion planning in dynamic and changing environments,” IEEE Transactions on Neural Networks and Learning Systems, vol. 35, no. 12, pp. 17425–17439, 2024
2024
-
[36]
A novel RRT*-based algorithm for motion planning in dynamic environments,
O. Adiyatov and H. A. Varol, “A novel RRT*-based algorithm for motion planning in dynamic environments,” inIEEE International Conference on Mechatronics and Automation, pp. 1416–1421, 2017
2017
-
[37]
MOD-RRT*: A sampling-based algorithm for robot path planning in dynamic environment,
J. Qi, H. Yang, and H. Sun, “MOD-RRT*: A sampling-based algorithm for robot path planning in dynamic environment,”IEEE Transactions on Industrial Electronics, vol. 68, no. 8, pp. 7244–7251, 2021
2021
-
[38]
RT-RRT: Reverse tree guided real-time path planning/replanning in unpredictable dynamic environments,
B. Cui, R. Cui, W. Yan, Y . Wang, and S. Zhang, “RT-RRT: Reverse tree guided real-time path planning/replanning in unpredictable dynamic environments,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5380–5387, 2024
2024
-
[39]
Risk-DTRRT- based optimal motion planning algorithm for mobile robots,
W. Chi, C. Wang, J. Wang, and M. Q.-H. Meng, “Risk-DTRRT- based optimal motion planning algorithm for mobile robots,”IEEE Transactions on Automation Science and Engineering, vol. 16, no. 3, pp. 1271–1288, 2019
2019
-
[40]
EB-RRT: Optimal motion planning for mobile robots,
J. Wang, M. Q.-H. Meng, and O. Khatib, “EB-RRT: Optimal motion planning for mobile robots,”IEEE Transactions on Automation Science and Engineering, vol. 17, no. 4, pp. 2063–2073, 2020
2063
-
[41]
T-PRM: Temporal probabilistic roadmap for path planning in dynamic environments,
M. H ¨uppi, L. Bartolomei, R. Mascaro, and M. Chli, “T-PRM: Temporal probabilistic roadmap for path planning in dynamic environments,” in IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 10320–10327, 2022
2022
-
[42]
Bi-Risk-RRT based efficient motion planning for autonomous ground vehicles,
H. Ma, F. Meng, C. Ye, J. Wang, and M. Q.-H. Meng, “Bi-Risk-RRT based efficient motion planning for autonomous ground vehicles,”IEEE Transactions on Intelligent Vehicles, vol. 7, no. 3, pp. 722–733, 2022
2022
-
[43]
ST-RRT*: Asymptotically-optimal bidirectional motion planning through space- time,
F. Grothe, V . N. Hartmann, A. Orthey, and M. Toussaint, “ST-RRT*: Asymptotically-optimal bidirectional motion planning through space- time,” inIEEE International Conference on Robotics and Automation, pp. 3314–3320, 2022
2022
-
[44]
NAMR-RRT: Neural adaptive motion planning for mobile robots in dynamic environments,
Z. Sun, B. Xia, P. Xie, X. Li, and J. Wang, “NAMR-RRT: Neural adaptive motion planning for mobile robots in dynamic environments,” IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 13087–13100, 2025. 19
2025
-
[45]
A state-time space approach for local trajectory replanning of an MA V in dynamic indoor environments,
F. Quan, Y . Shen, P. Liu, X. Lyu, and H. Chen, “A state-time space approach for local trajectory replanning of an MA V in dynamic indoor environments,”IEEE Robotics and Automation Letters, vol. 10, no. 4, pp. 3438–3445, 2025
2025
-
[46]
D* lite,
S. Koenig and M. Likhachev, “D* lite,” in18th National Conference on Artificial Intelligence, pp. 476–483, 2002
2002
-
[47]
Multi-objective path-based D* lite,
Z. Ren, S. Rathinam, M. Likhachev, and H. Choset, “Multi-objective path-based D* lite,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 3318–3325, 2022
2022
-
[48]
Bidirectional search strategy for incremental search-based path planning,
C. Li, H. Ma, J. Wang, and M. Q.-H. Meng, “Bidirectional search strategy for incremental search-based path planning,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 7311– 7317, 2023
2023
-
[49]
SIPP: Safe interval path planning for dynamic environments,
M. Phillips and M. Likhachev, “SIPP: Safe interval path planning for dynamic environments,” inIEEE International Conference on Robotics and Automation, pp. 5628–5635, 2011
2011
-
[50]
Multi-objective safe-interval path planning with dynamic obstacles,
Z. Ren, S. Rathinam, M. Likhachev, and H. Choset, “Multi-objective safe-interval path planning with dynamic obstacles,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 8154–8161, 2022
2022
-
[51]
Dynamic channel: A planning framework for crowd navigation,
C. Cao, P. Trautman, and S. Iba, “Dynamic channel: A planning framework for crowd navigation,” inIEEE International Conference on Robotics and Automation, pp. 5551–5557, 2019
2019
-
[52]
Safe interval motion plan- ning for quadrotors in dynamic environments,
S. Huang, Y . Wu, Y . Tao, and V . Kumar, “Safe interval motion plan- ning for quadrotors in dynamic environments,” inIEEE International Conference on Robotics and Automation, pp. 2780–2786, 2025
2025
-
[53]
Search- based online trajectory planning for car-like robots in highly dynamic environments,
J. Lin, T. Zhou, D. Zhu, J. Liu, and M. Q.-H. Meng, “Search- based online trajectory planning for car-like robots in highly dynamic environments,” inIEEE International Conference on Robotics and Automation, pp. 8151–8157, 2021
2021
-
[54]
RAST: Risk-aware spatio-temporal safety corridors for MA V navi- gation in dynamic uncertain environments,
G. Chen, S. Wu, M. Shi, W. Dong, H. Zhu, and J. Alonso-Mora, “RAST: Risk-aware spatio-temporal safety corridors for MA V navi- gation in dynamic uncertain environments,”IEEE Robotics and Au- tomation Letters, vol. 8, no. 2, pp. 808–815, 2023
2023
-
[55]
Risk-aware trajectory sam- pling for quadrotor obstacle avoidance in dynamic environments,
G. Chen, P. Peng, P. Zhang, and W. Dong, “Risk-aware trajectory sam- pling for quadrotor obstacle avoidance in dynamic environments,”IEEE Transactions on Industrial Electronics, vol. 70, no. 12, pp. 12606– 12615, 2023
2023
-
[56]
Safe lattice planning for motion planning with dynamic obstacles,
E. Wiman and M. Tiger, “Safe lattice planning for motion planning with dynamic obstacles,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 9287–9294, 2025
2025
-
[57]
A note on two problems in connexion with graphs,
E. W. Dijkstra, “A note on two problems in connexion with graphs,” Numerische Mathematik, vol. 1, no. 1, pp. 269–271, 1959
1959
-
[58]
A formal basis for the heuristic determination of minimum cost paths,
P. E. Hart, N. J. Nilsson, and B. Raphael, “A formal basis for the heuristic determination of minimum cost paths,”IEEE Transactions on Systems Science and Cybernetics, vol. 4, no. 2, pp. 100–107, 1968
1968
-
[59]
The focussed D* algorithm for real-time replanning,
A. Stentzet al., “The focussed D* algorithm for real-time replanning,” inIJCAI, vol. 95, pp. 1652–1659, 1995
1995
-
[60]
Lifelong Planning A*,
S. Koenig, M. Likhachev, and D. Furcy, “Lifelong Planning A*,” Artificial Intelligence, vol. 155, no. 1-2, pp. 93–146, 2004
2004
-
[61]
Planning in domains with cost function dependent actions,
M. Phillips and M. Likhachev, “Planning in domains with cost function dependent actions,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 25, pp. 74–80, 2011
2011
-
[62]
Anytime safe interval path planning for dynamic environments,
V . Narayanan, M. Phillips, and M. Likhachev, “Anytime safe interval path planning for dynamic environments,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 4708–4715, 2012
2012
-
[63]
Using state domi- nance for path planning in dynamic environments with moving obsta- cles,
J. P. Gonzalez, A. Dornbush, and M. Likhachev, “Using state domi- nance for path planning in dynamic environments with moving obsta- cles,” inIEEE International Conference on Robotics and Automation, pp. 4009–4015, 2012
2012
-
[64]
Robust and efficient quadrotor trajectory generation for fast autonomous flight,
B. Zhou, F. Gao, L. Wang, C. Liu, and S. Shen, “Robust and efficient quadrotor trajectory generation for fast autonomous flight,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3529–3536, 2019
2019
-
[65]
Chance-constrained optimal path planning with obstacles,
L. Blackmore, M. Ono, and B. C. Williams, “Chance-constrained optimal path planning with obstacles,”IEEE Transactions on Robotics, vol. 27, no. 6, pp. 1080–1094, 2011
2011
-
[66]
Scenario-based trajectory optimization in uncertain dynamic environ- ments,
O. de Groot, B. Brito, L. Ferranti, D. Gavrila, and J. Alonso-Mora, “Scenario-based trajectory optimization in uncertain dynamic environ- ments,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 5389– 5396, 2021
2021
-
[67]
Model predictive contouring control for collision avoidance in unstructured dynamic environments,
B. Brito, B. Floor, L. Ferranti, and J. Alonso-Mora, “Model predictive contouring control for collision avoidance in unstructured dynamic environments,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4459–4466, 2019
2019
-
[68]
Chance-constrained collision avoidance for MA Vs in dynamic environments,
H. Zhu and J. Alonso-Mora, “Chance-constrained collision avoidance for MA Vs in dynamic environments,”IEEE Robotics and Automation Letters, vol. 4, no. 2, pp. 776–783, 2019
2019
-
[69]
A real-time approach for chance-constrained motion planning with dynamic obstacles,
M. Castillo-Lopez, P. Ludivig, S. A. Sajadi-Alamdari, J. L. Sanchez- Lopez, M. A. Olivares-Mendez, and H. V oos, “A real-time approach for chance-constrained motion planning with dynamic obstacles,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 3620–3625, 2020
2020
-
[70]
Probabilistic risk assessment for chance-constrained collision avoidance in uncertain dynamic environments,
K. A. Mustafa, O. de Groot, X. Wang, J. Kober, and J. Alonso- Mora, “Probabilistic risk assessment for chance-constrained collision avoidance in uncertain dynamic environments,” inIEEE International Conference on Robotics and Automation, pp. 3628–3634, 2023
2023
-
[71]
Dynamic control barrier function-based model predictive control to safety-critical obstacle-avoidance of mobile robot,
Z. Jian, Z. Yan, X. Lei, Z. Lu, B. Lan, X. Wang, and B. Liang, “Dynamic control barrier function-based model predictive control to safety-critical obstacle-avoidance of mobile robot,” inIEEE Interna- tional Conference on Robotics and Automation, pp. 3679–3685, 2023
2023
-
[72]
Risk euclidean distance-based model predictive path integral to safety- critical obstacle avoidance,
Z. Huang, R. Li, W. Chen, Z. Lin, Z. Wu, and B. Zhang, “Risk euclidean distance-based model predictive path integral to safety- critical obstacle avoidance,” inIEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1906–1913, 2025
1906
-
[73]
Reactive collision avoidance for safe agile navigation,
A. Saviolo, N. Picello, J. Mao, R. Verma, and G. Loianno, “Reactive collision avoidance for safe agile navigation,” inIEEE International Conference on Robotics and Automation, pp. 16125–16132, 2025
2025
-
[74]
Integrating predictive motion uncertainties with distributionally robust risk-aware control for safe robot navigation in crowds,
K. Ryu and N. Mehr, “Integrating predictive motion uncertainties with distributionally robust risk-aware control for safe robot navigation in crowds,” inIEEE International Conference on Robotics and Automa- tion, pp. 2410–2417, 2024
2024
-
[75]
Bar-Shalom, X
Y . Bar-Shalom, X. R. Li, and T. Kirubarajan,Estimation with applica- tions to tracking and navigation: theory algorithms and software. John Wiley & Sons, 2004
2004
-
[76]
PIE: A large-scale dataset and models for pedestrian intention estimation and trajectory prediction,
A. Rasouli, I. Kotseruba, T. Kunic, and J. K. Tsotsos, “PIE: A large-scale dataset and models for pedestrian intention estimation and trajectory prediction,” inProceedings of the IEEE/CVF International Conference on Computer Vision, pp. 6262–6271, 2019
2019
-
[77]
PRECOG: Prediction conditioned on goals in visual multi-agent settings,
N. Rhinehart, R. McAllister, K. Kitani, and S. Levine, “PRECOG: Prediction conditioned on goals in visual multi-agent settings,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 2821–2830, 2019
2019
-
[78]
Social LSTM: Human trajectory prediction in crowded spaces,
A. Alahi, K. Goel, V . Ramanathan, A. Robicquet, L. Fei-Fei, and S. Savarese, “Social LSTM: Human trajectory prediction in crowded spaces,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 961–971, 2016
2016
-
[79]
Human trajectory forecasting in crowds: A deep learning perspective,
P. Kothari, S. Kreiss, and A. Alahi, “Human trajectory forecasting in crowds: A deep learning perspective,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 7386–7400, 2021
2021
-
[80]
Trajec- tron++: Dynamically-feasible trajectory forecasting with heterogeneous data,
T. Salzmann, B. Ivanovic, P. Chakravarty, and M. Pavone, “Trajec- tron++: Dynamically-feasible trajectory forecasting with heterogeneous data,” inComputer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part XVIII 16, pp. 683–700, Springer, 2020
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.