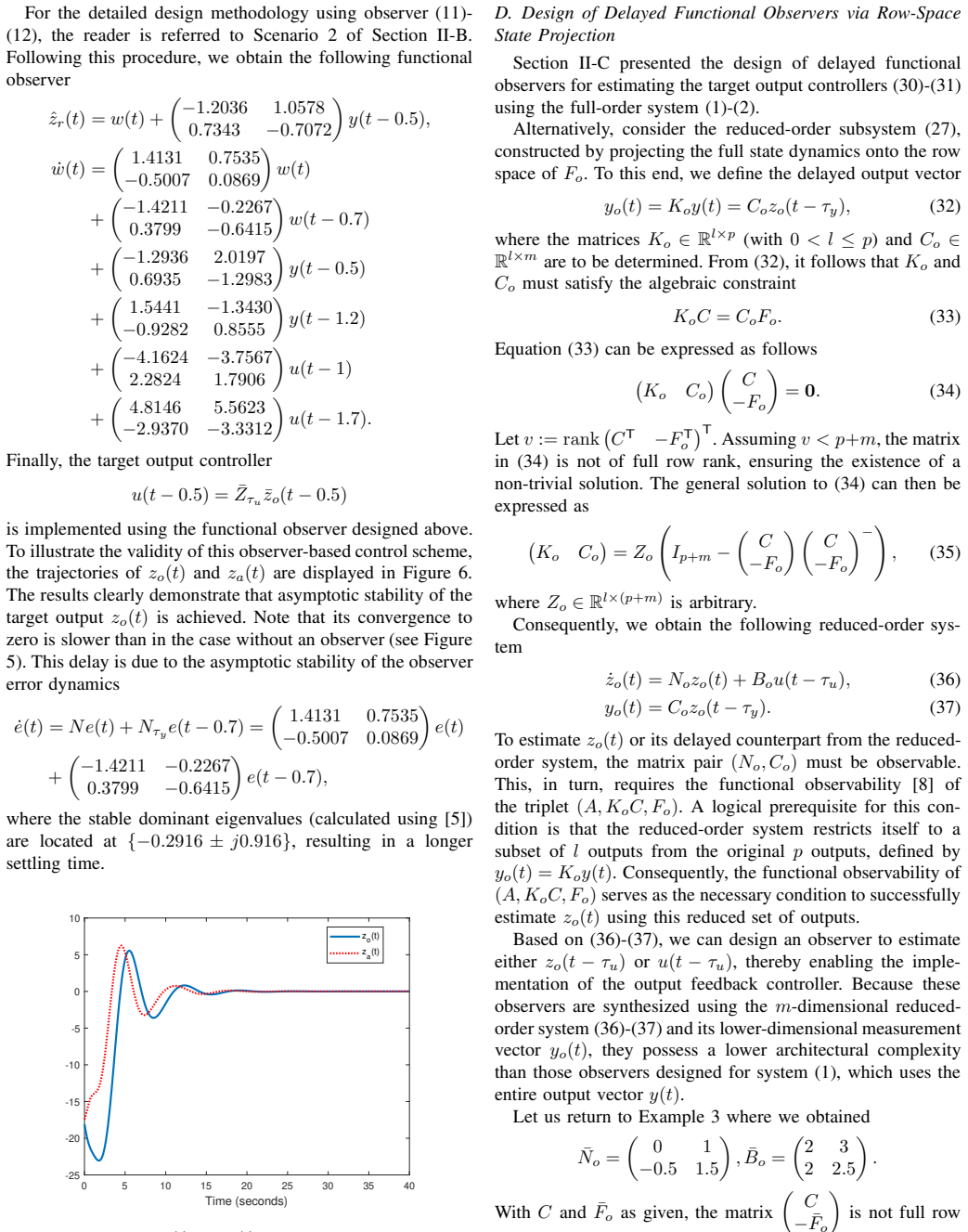
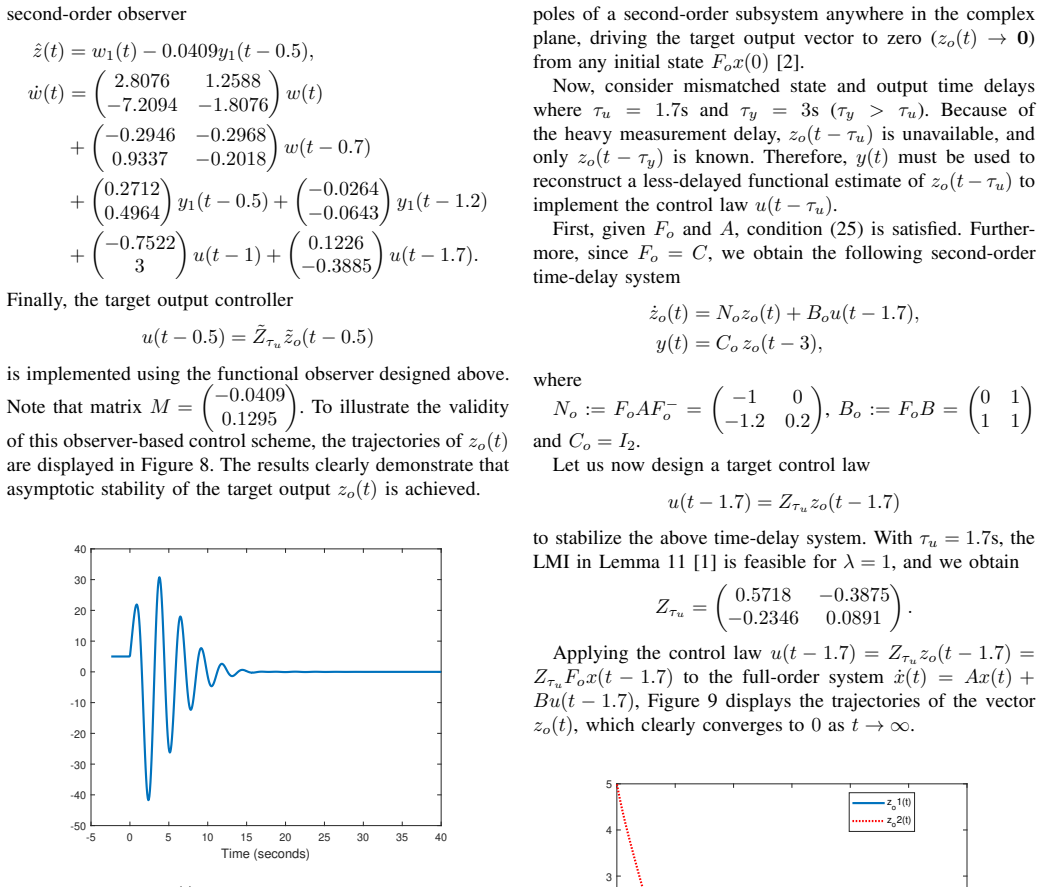
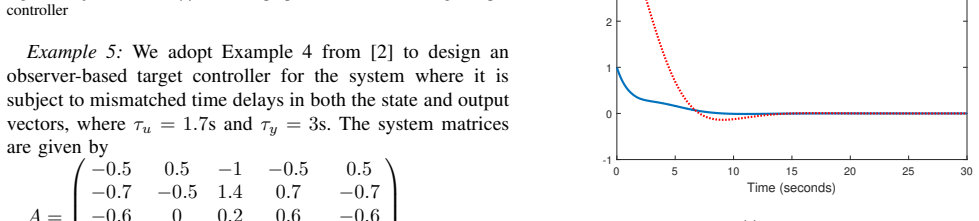
Observer-Based Control of Linear Systems with Mismatched Input and Output Delays
Pith reviewed 2026-06-28 09:21 UTC · model grok-4.3
The pith
Linear systems with independent input and output delays are stabilized by realizing an LMI-designed delayed state-feedback controller through time-delay compensators.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that an asymptotically stabilizing delayed state-feedback controller obtained via LMI techniques can be realized by novel time-delay compensators, thereby accommodating an output measurement delay that is independent of the input delay and enabling direct estimation of the control law; the construction extends directly to target output controllers under the same mismatched-delay conditions.
What carries the argument
The pairing of an LMI-synthesized delayed state-feedback controller with time-delay compensators that separately reconstruct the effect of the output delay.
If this is right
- The closed-loop system remains asymptotically stable under the combined controller and compensators.
- The output delay can differ arbitrarily from the input delay while the control law is still estimated directly.
- The same compensator structure works when only output measurements are available, yielding a target output controller.
Where Pith is reading between the lines
- The compensators could be attached to any existing LMI-designed delayed controller without requiring a fresh stability proof.
- The separation of input and output delay handling might extend to cases where one delay is time-varying if the underlying LMI conditions admit suitable adaptation.
Load-bearing premise
A stabilizing delayed state-feedback controller for the system exists and can be found by LMI methods, and the compensators can be added to it without creating new instability.
What would settle it
A concrete linear system for which an LMI yields a stabilizing delayed state-feedback law, yet closed-loop simulation with the compensators under mismatched delays shows divergence.
Figures



read the original abstract
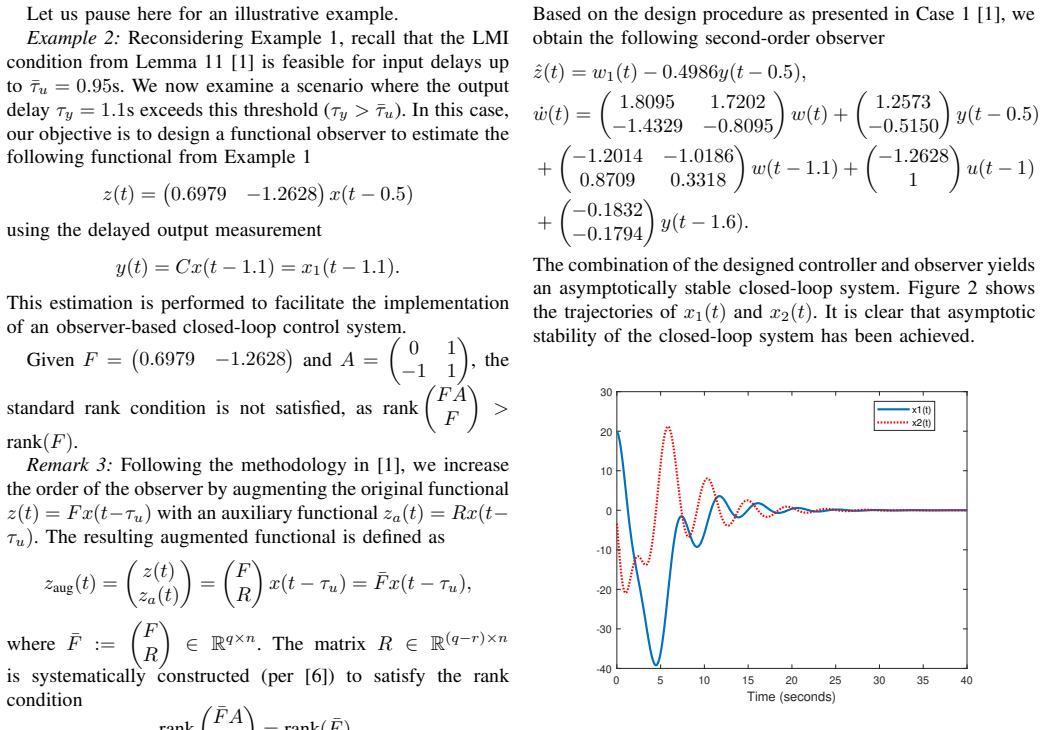
This paper investigates the stabilization of linear systems subject to simultaneous, mismatched time delays in both the control input and system output vectors. The proposed control framework is developed in two primary stages. First, an asymptotically stabilizing delayed state-feedback controller is synthesized by leveraging recent advancements in Linear Matrix Inequality (LMI) techniques. Second, this controller is realized using novel time-delay compensators \cite{trinhnam26}. This architecture successfully accommodates an output measurement delay $\tau_y$ that is independent of the input delay $\tau_u$, enabling direct estimation of the delayed state-feedback control law. The proposed methodology is then extended to target output controllers to account for simultaneous, mismatched time delays in both the control input and system output vectors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a two-stage observer-based control architecture for linear systems subject to independent (mismatched) input delay τ_u and output measurement delay τ_y. Stage 1 synthesizes an asymptotically stabilizing delayed state-feedback law via existing LMI techniques; Stage 2 realizes that law using novel time-delay compensators from the cited reference trinhnam26. The architecture is claimed to accommodate independent τ_y without requiring τ_y = τ_u, and the method is extended to output-feedback controllers.
Significance. If a rigorous composite stability certificate were supplied, the result would furnish a systematic LMI-based route to output-feedback stabilization under independent input/output delays, extending recent delay-compensation techniques. The absence of any LMI formulation, closed-loop Lyapunov or LMI analysis, or numerical example in the manuscript, however, leaves the practical significance currently unsupported.
major comments (3)
- [Abstract / methodology overview] Abstract and methodology description: the central claim that the LMI-synthesized delayed state-feedback can be realized by the compensators of trinhnam26 while an observer handles independent τ_y rests on the unproven assertion that no additional stability conditions arise from the observer error dynamics. No composite Lyapunov function or augmented LMI is exhibited to certify the interconnection.
- [Stage-1 controller synthesis] The manuscript invokes 'recent advancements in LMI techniques' for the delayed state-feedback design yet supplies neither the explicit LMI conditions nor the plant model (including how the input delay enters the state equation) used to obtain the controller.
- [Output-feedback extension] Extension to output controllers: the claim that the same compensator-plus-observer architecture works for dynamic output feedback likewise lacks any stability argument or LMI that accounts for the simultaneous presence of both delays in the closed-loop map.
minor comments (2)
- Notation for the two delays (τ_u, τ_y) and the compensator blocks should be introduced with a single diagram or block diagram early in the paper.
- The citation trinhnam26 appears only in the abstract; its precise statement (assumptions on the plant, matched vs. mismatched delays) should be recalled in the main text before the combination is asserted.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We address each major comment below and indicate the revisions that will be made to strengthen the stability arguments and explicit formulations.
read point-by-point responses
-
Referee: [Abstract / methodology overview] Abstract and methodology description: the central claim that the LMI-synthesized delayed state-feedback can be realized by the compensators of trinhnam26 while an observer handles independent τ_y rests on the unproven assertion that no additional stability conditions arise from the observer error dynamics. No composite Lyapunov function or augmented LMI is exhibited to certify the interconnection.
Authors: We agree that an explicit composite stability certificate is required. The manuscript currently relies on the realization properties established in the cited compensator reference without deriving a joint Lyapunov-Krasovskii functional for the observer-compensator interconnection. In the revision we will add a dedicated stability section that constructs such a functional and derives the associated LMI conditions guaranteeing asymptotic stability of the overall closed-loop system. revision: yes
-
Referee: [Stage-1 controller synthesis] The manuscript invokes 'recent advancements in LMI techniques' for the delayed state-feedback design yet supplies neither the explicit LMI conditions nor the plant model (including how the input delay enters the state equation) used to obtain the controller.
Authors: The LMI conditions are drawn from existing results on delayed state-feedback; however, the manuscript does not reproduce them or restate the precise plant model. We will insert the explicit LMI formulation together with the system equations (showing the input-delay term) to make the synthesis step self-contained. revision: yes
-
Referee: [Output-feedback extension] Extension to output controllers: the claim that the same compensator-plus-observer architecture works for dynamic output feedback likewise lacks any stability argument or LMI that accounts for the simultaneous presence of both delays in the closed-loop map.
Authors: The same limitation applies to the output-feedback extension. We will augment the revised manuscript with the corresponding composite Lyapunov analysis and LMI conditions that incorporate both mismatched delays in the dynamic output-feedback setting. revision: yes
Circularity Check
Central claim of direct combination for mismatched delays rests on self-cited compensators without new composite analysis
specific steps
-
self citation load bearing
[Abstract]
"Second, this controller is realized using novel time-delay compensators \cite{trinhnam26}. This architecture successfully accommodates an output measurement delay τ_y that is independent of the input delay τ_u, enabling direct estimation of the delayed state-feedback control law."
The claim that the architecture successfully handles independent delays is presented as following from the novel compensators in the self-cited prior work. The paper provides no independent verification or composite stability condition for combining the LMI controller, observer, and compensators; the central result therefore inherits its justification from the overlapping-author citation.
full rationale
The paper's two-stage architecture (LMI-synthesized delayed state-feedback followed by realization via compensators) asserts successful accommodation of independent τ_y and τ_u. This assertion is justified solely by citation to trinhnam26 for the compensators, with authors overlapping the present work. No new Lyapunov or LMI analysis is indicated for the observer error dynamics interacting with the compensators under mismatched delays, so the load-bearing integration step reduces to the prior self-cited result.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The plant is a finite-dimensional linear time-invariant system whose state-feedback stabilization problem with input delay is solvable by existing LMI methods.
- ad hoc to paper The time-delay compensators introduced in the cited reference can be combined with the LMI controller without introducing new instability.
Forward citations
Cited by 2 Pith papers
-
Delayed Functional Observers for Output-Delayed Linear Systems
Proposes a class of delayed functional observers for output-delayed linear systems to enable reconstruction of delayed control laws.
-
Delayed Functional Observers for the Realization of Generalized Delayed Control Laws
Design of delayed functional observers for estimating generalized delayed control laws to stabilize time-delay systems with mismatched input and output delays.
Reference graph
Works this paper leans on
-
[1]
Time-Delay Compensators for Linear Systems with Delayed Output Measurements
H. Trinh, P . T. Nam and T. N. Nguyen, “Time-Delay compensa tors for linear systems with delayed output measurements”, Prep rint at https://doi.org/10.48550/arXiv.2604.17434 (2026)
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.17434 2026
-
[2]
Existence and design of tar get output controllers
T. Fernando and M. Darouach, “Existence and design of tar get output controllers”, IEEE Trans. Autom. Contr ., vol. 70, no. 9, pp. 6104-6110, 2025
2025
-
[3]
Existence and design of functional observ ers
M. Darouach, “Existence and design of functional observ ers”, IEEE Trans. Autom. Contr ., vol. 45, no.5, pp. 940-943, 2000
2000
-
[4]
Trinh and T
H. Trinh and T. Fernando, Functional Observers for Dynamical Systems . Springer-V erlag, Berlin Heidelberg, 2012
2012
-
[5]
Reliably computing all character istic roots of delay differential equations in a given right half plane usi ng a spectral method,
Z. Wu and W. Michiels, “Reliably computing all character istic roots of delay differential equations in a given right half plane usi ng a spectral method,” Journal of Computational and Applied Mathematics , vol. 236, no. 9, pp. 2499-2514, 2012
2012
-
[6]
H. Trinh, P . T. Nam and T. Fernando, “Existence and design of functional observers for time-delay systems with delayed output measu rements”, Preprint at https://doi.org/10.48550/arXiv.2603.09395 (2026)
-
[7]
Trinh, V
H. Trinh, V . T. Huynh, S. Y u and T. Fernando, Unknown Inputs Estimation in Linear Time-Delay Systems Using Generalized Functional Observers. Springer Cham, 2026
2026
-
[8]
Existence conditions for functional observability from an eigenspace perspecti ve
L. S. Jennings, T. L. Fernando and H. M. Trinh, “Existence conditions for functional observability from an eigenspace perspecti ve”, IEEE Trans. Autom. Contr ., vol. 56, no. 12, pp. 2957-2961, 2010. 13
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.