Multi-Agent Next-Best-View Optimization for Risk-Averse Planning
Pith reviewed 2026-06-28 09:45 UTC · model grok-4.3
The pith
A distributed multi-agent next-best-view method using private 3D maps and Consensus ADMM approaches centralized mapping quality and safety while cutting communication by orders of magnitude.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Each robot keeps a private 3D Gaussian Splatting map; the team maximizes expected information gain over masked zones along planned trajectories; the resulting distributed problem is solved by Consensus ADMM on a communication graph; collision risk is scored via Average Value-at-Risk on the local map; experiments across team sizes in Gibson environments show the distributed version reaches near-centralized mapping quality and trajectory safety at orders-of-magnitude lower communication volume.
What carries the argument
Consensus ADMM (C-ADMM) applied to the distributed next-best-view objective, with per-robot masking and scoring derived from Average Value-at-Risk on private 3D Gaussian Splatting maps.
If this is right
- Robot teams of increasing size can maintain comparable mapping completeness without proportional growth in required communication bandwidth.
- Path safety remains governed by local Average Value-at-Risk calculations even when raw sensor data stays private.
- The masking radius derived from risk values limits trajectory evaluation to feasible zones on each robot's map.
- Performance holds across multiple team sizes in the tested simulation environments.
Where Pith is reading between the lines
- The same limited-exchange pattern could be tested on physical robots where wireless links are intermittent or power-constrained.
- Replacing 3D Gaussian Splatting with other local map representations might preserve the communication savings if expected information gain can still be computed locally.
- Extending the risk model to include dynamic obstacles would show whether Average Value-at-Risk on static maps remains sufficient.
Load-bearing premise
Private local 3D Gaussian Splatting maps alone suffice for accurate computation of expected information gain and Average Value-at-Risk without significant degradation from the lack of raw sensor data sharing across the team.
What would settle it
A side-by-side run in the same Gibson environment with a larger team where the distributed method produces measurably lower map coverage or higher collision incidence than a centralized baseline that shares raw data, despite using only the stated viewpoint and scalar exchanges.
Figures

read the original abstract
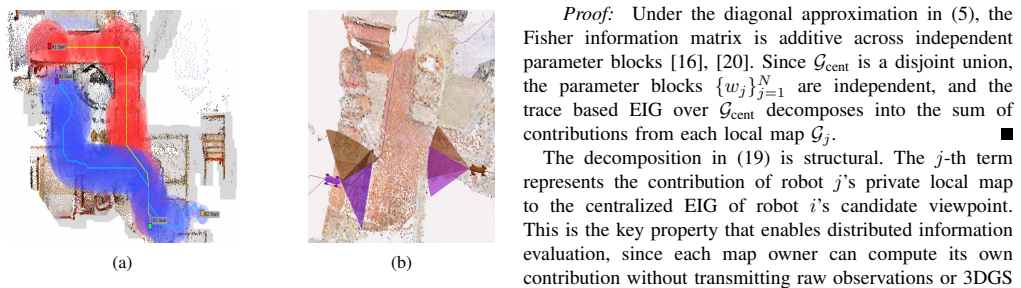
Multi-agent Next-Best-View (NBV) selection for safe path planning in uncertain and unknown environments requires informative, safety-aware, and efficient coordination. Centralized approaches rely on sharing raw sensor data or significant communication overhead, resulting in limited scalability. We propose a distributed, risk-aware multi-agent NBV framework in which each robot maintains a private local 3D Gaussian Splatting map and the team jointly maximizes expected information gain (EIG) restricted to masked zones along planned trajectories. The resulting distributed objective is solved by Consensus ADMM (C-ADMM) over a communication graph, with each robot exchanging only candidate viewpoints, planned trajectory descriptors, and scalar EIG contributions. Collision risk along each trajectory is modeled via Average Value-at-Risk (AV@R) over the local 3DGS map and used both to shape the masking radius and to score planned paths. Experiments in Gibson environments at multiple team sizes show that the distributed formulation approaches the centralized baseline in mapping quality and trajectory safety while reducing communication by orders of magnitude.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a distributed multi-agent Next-Best-View (NBV) framework for risk-averse planning. Each robot maintains a private local 3D Gaussian Splatting map; the team jointly maximizes expected information gain (EIG) restricted to masked zones along trajectories, solved via Consensus ADMM (C-ADMM) with exchange of only candidate viewpoints, trajectory descriptors, and scalar EIG values. Collision risk is modeled by Average Value-at-Risk (AV@R) over the local map to shape masking and score paths. Experiments in Gibson environments at multiple team sizes claim the distributed formulation approaches centralized baseline performance in mapping quality and trajectory safety while reducing communication by orders of magnitude.
Significance. If the performance claims are supported by the experiments and the local-map assumption holds, the work would be significant for scalable multi-robot exploration, as it combines information-theoretic NBV planning with coherent risk measures in a communication-efficient distributed solver.
major comments (1)
- [Abstract] Abstract: the central claim that the distributed formulation approaches the centralized baseline in mapping quality and trajectory safety rests on the assumption that private local 3DGS maps produce EIG (restricted to masked zones) and AV@R scores sufficiently close to a centralized fused map. No quantitative bound on divergence due to partial overlap or registration error, nor any ablation comparing local vs. fused EIG/AV@R on identical viewpoints, is referenced; this assumption is load-bearing for the scalability result.
minor comments (1)
- The abstract does not specify the exact team sizes tested or the numerical communication reduction factor achieved.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The concern regarding the load-bearing assumption on local-map EIG and AV@R fidelity is well-taken, and we address it directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the distributed formulation approaches the centralized baseline in mapping quality and trajectory safety rests on the assumption that private local 3DGS maps produce EIG (restricted to masked zones) and AV@R scores sufficiently close to a centralized fused map. No quantitative bound on divergence due to partial overlap or registration error, nor any ablation comparing local vs. fused EIG/AV@R on identical viewpoints, is referenced; this assumption is load-bearing for the scalability result.
Authors: We agree that the assumption is central and that the manuscript would be strengthened by explicit quantification. The current experiments show the distributed policy approaching centralized mapping quality and safety metrics across team sizes, which provides indirect empirical support, but we acknowledge the absence of a direct local-vs-fused ablation on identical viewpoints. In the revised manuscript we will add (i) an ablation that evaluates EIG and AV@R on the same candidate viewpoints using both private local 3DGS maps and a centralized fused map, and (ii) reported statistics (mean and worst-case divergence) induced by partial overlap and registration error under the sensor and trajectory conditions used in the Gibson experiments. These additions will supply the requested quantitative bounds while preserving the communication-efficiency claims. revision: yes
Circularity Check
No circularity; derivation relies on standard ADMM/AV@R and empirical comparison
full rationale
The provided abstract and description show a framework that applies Consensus ADMM to a distributed objective built from local 3DGS maps, EIG masking, and AV@R risk scoring. No equations, self-citations, or fitted parameters are presented that reduce the central result (distributed performance approaching centralized) to an input by construction. The claims rest on experimental outcomes in Gibson environments rather than any self-definitional or fitted-input pattern. This matches the default expectation of a non-circular empirical paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
3d gaussian splatting for real-time radiance field rendering,
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,”ACM Transactions on Graphics, vol. 42, no. 4, July 2023. [Online]. Available: https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/
2023
-
[2]
Splat-nav: Safe real-time robot navi- gation in gaussian splatting maps,
T. Chen, O. Shorinwa, J. Bruno, A. Swann, J. Yu, W. Zeng, K. Nagami, P. Dames, and M. Schwager, “Splat-nav: Safe real-time robot navi- gation in gaussian splatting maps,”IEEE Transactions on Robotics, vol. 41, pp. 2765–2784, 2025
2025
-
[3]
Gaussian splatting slam,
H. Matsuki, R. Murai, P. H. J. Kelly, and A. J. Davison, “Gaussian splatting slam,” in2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
2024
-
[4]
AG-SLAM: Active gaussian splatting SLAM,
W. Jiang, B. LEI, K. Ashton, and K. Daniilidis, “AG-SLAM: Active gaussian splatting SLAM,” 2024. [Online]. Available: https://openreview.net/forum?id=Lwf5WeiyA9
2024
-
[5]
Efficient greedy algorithms for feature selection in robot visual localization,
V . Pandey, A. Mollaei, and N. Motee, “Efficient greedy algorithms for feature selection in robot visual localization,”arXiv preprint arXiv:2511.20894, 2025
-
[6]
Vista: Open-vocabulary, task-relevant robot exploration with online semantic gaussian splatting,
K. Nagami, T. Chen, J. Yu, O. Shorinwa, M. Adang, C. Dougherty, E. Cristofalo, and M. Schwager, “Vista: Open-vocabulary, task-relevant robot exploration with online semantic gaussian splatting,”arXiv preprint arXiv:2507.01125, 2025
-
[7]
Ac- tivesplat: High-fidelity scene reconstruction through active gaussian splatting,
Y . Li, Z. Kuang, T. Li, Q. Hao, Z. Yan, G. Zhou, and S. Zhang, “Ac- tivesplat: High-fidelity scene reconstruction through active gaussian splatting,”IEEE Robotics and Automation Letters, 2025
2025
-
[8]
A. M. Khass, A. Cosse, V . Pandey, and N. Motee, “Conflict-aware active perception and control in 3d gaussian splatting fields via control barrier functions,”arXiv preprint arXiv:2605.20566, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[9]
Nerf: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “Nerf: Representing scenes as neural radiance fields for view synthesis,” inECCV, 2020
2020
-
[10]
Hammer: Heterogeneous, multi- robot semantic gaussian splatting,
J. Yu, T. Chen, and M. Schwager, “Hammer: Heterogeneous, multi- robot semantic gaussian splatting,”IEEE Robotics and Automation Letters, 2025
2025
-
[11]
Magic-slam: Multi-agent gaussian globally consistent slam,
V . Yugay, T. Gevers, and M. R. Oswald, “Magic-slam: Multi-agent gaussian globally consistent slam,” in2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025, pp. 6741– 6750
2025
-
[12]
H. Zhao, X. Zhou, B. Ivanovic, and N. Mehr, “Udon: Uncertainty- weighted distributed optimization for multi-robot neural implicit mapping under extreme communication constraints,”arXiv preprint arXiv:2509.12702, 2025
-
[13]
Activermap: Radiance field for active mapping and planning,
H. Zhan, J. Zheng, Y . Xu, I. D. Reid, and H. Rezatofighi, “Activermap: Radiance field for active mapping and planning,” ArXiv, vol. abs/2211.12656, 2022. [Online]. Available: https: //api.semanticscholar.org/CorpusID:253802074
-
[14]
Rt-guide: Real-time gaussian splatting for information-driven explo- ration,
Y . Tao, D. Ong, V . Murali, I. Spasojevic, P. Chaudhari, and V . Kumar, “Rt-guide: Real-time gaussian splatting for information-driven explo- ration,”IEEE Robotics and Automation Letters, pp. 11 594–11 601, 2025
2025
-
[15]
G. Liu, W. Jiang, B. Lei, V . Pandey, K. Daniilidis, and N. Motee, “Beyond uncertainty: Risk-aware active view acquisition for safe robot navigation and 3d scene understanding with fisherrf,”ArXiv, vol. abs/2403.11396, 2024. [Online]. Available: https://api.semanticscholar.org/CorpusID:268513623
-
[16]
Active next-best-view optimization for risk-averse path planning,
A. M. Khass, G. Liu, V . Pandey, W. Jiang, B. Lei, K. Daniilidis, and N. Motee, “Active next-best-view optimization for risk-averse path planning,”arXiv preprint arXiv:2510.06481, 2025
-
[17]
Ramen: Real-time asynchronous multi-agent neural implicit mapping,
H. Zhao, B. Ivanovic, and N. Mehr, “Ramen: Real-time asynchronous multi-agent neural implicit mapping,” inRobotics: Science and Sys- tems (RSS), 2025
2025
-
[18]
Siren: Se- mantic, initialization-free registration of multi-robot gaussian splatting maps,
O. Shorinwa, J. Sun, M. Schwager, and A. Majumdar, “Siren: Se- mantic, initialization-free registration of multi-robot gaussian splatting maps,” inProceedings of the 9th Conference on Robot Learning (CoRL), 2025
2025
-
[19]
Unifying approaches in active learning and active sampling via fisher information and information- theoretic quantities,
A. Kirsch and Y . Gal, “Unifying approaches in active learning and active sampling via fisher information and information- theoretic quantities,”Transactions on Machine Learning Research, 2022, expert Certification. [Online]. Available: https://openreview.net/ forum?id=UVDAKQANOW
2022
-
[20]
Fisherrf: Active view selection and uncertainty quantification for radiance fields using fisher informa- tion,
W. Jiang, B. Lei, and K. Daniilidis, “Fisherrf: Active view selection and uncertainty quantification for radiance fields using fisher informa- tion,”arXiv, 2023
2023
-
[21]
Value-at-risk vs. condi- tional value-at-risk in risk management and optimization,
S. Sarykalin, G. Serraino, and S. Uryasev, “Value-at-risk vs. condi- tional value-at-risk in risk management and optimization,”INFORMS Tutorials in Operations Research, vol. 2014, pp. 270–294, 2014
2014
-
[22]
Distributed optimization and statistical learning via the alternating direction method of multipliers,
S. P. Boyd, N. Parikh, E. Chu, B. Peleato, and J. Eckstein, “Distributed optimization and statistical learning via the alternating direction method of multipliers,”F ound. Trends Mach. Learn., vol. 3, pp. 1–122,
-
[23]
Available: https://api.semanticscholar.org/CorpusID: 51789432
[Online]. Available: https://api.semanticscholar.org/CorpusID: 51789432
-
[24]
Habitat 2.0: Training home assistants to rearrange their habitat,
A. Szot, A. Clegg, E. Undersander, E. Wijmans, Y . Zhao, J. Turner, N. Maestre, M. Mukadam, D. S. Chaplot, O. Maksymets, A. Gokaslan, V . V ondruˇs, S. Dharur, F. Meier, W. Galuba, A. Chang, Z. Kira, V . Koltun, J. Malik, M. Savva, and D. Batra, “Habitat 2.0: Training home assistants to rearrange their habitat,” inAdvances in Neural In- formation Processi...
2021
-
[25]
Gibson env: Real-world perception for embodied agents,
F. Xia, A. R. Zamir, Z. He, A. Sax, J. Malik, and S. Savarese, “Gibson env: Real-world perception for embodied agents,” in2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018, pp. 9068–9079
2018
-
[26]
Image quality metrics: Psnr vs. ssim,
A. Hor ´e and D. Ziou, “Image quality metrics: Psnr vs. ssim,” in 2010 20th International Conference on Pattern Recognition, 2010, pp. 2366–2369
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.