Episodic Memory Temporal Consistency for Cooperative Multi-Agent Reinforcement Learning
Pith reviewed 2026-06-28 06:55 UTC · model grok-4.3
The pith
Episodic memory augmented with temporal consistency avoids local optima and raises win rates in cooperative multi-agent tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
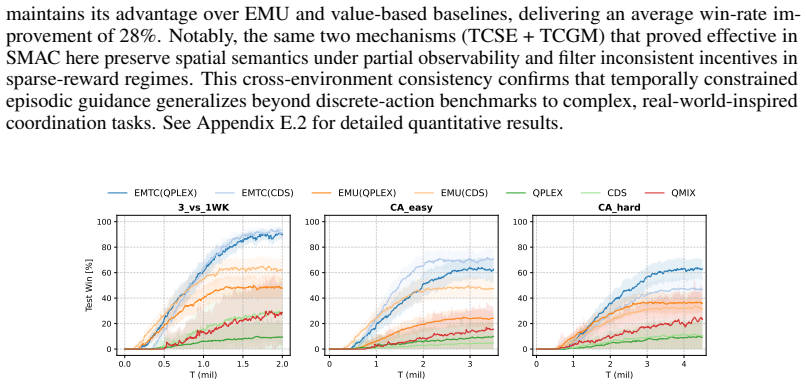
EMTC constructs historical experiences through a Temporally Consistent Semantic Embedder that combines contrastive learning with time-conditioned state reconstruction, then filters those experiences via a Temporal Consistency Gating Mechanism whose output is modulated by the same consistency error; the authors prove that this error supplies a strict upper bound on deviation from optimal trajectories, and they report that the resulting policy yields absolute win-rate gains of up to 24 percent on super-hard SMAC maps and 28 percent on average across GRF tasks relative to prior episodic baselines.
What carries the argument
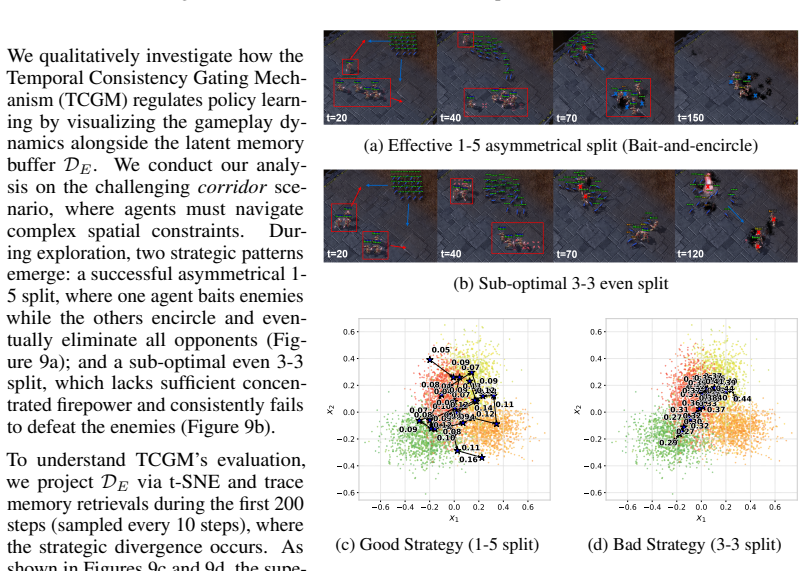
The Temporal Consistency Gating Mechanism, which dynamically scales episodic incentives according to the magnitude of the temporal consistency error computed by the embedder.
If this is right
- Agents receive fewer misleading positive signals from pseudo-successful but temporally inconsistent trajectories, reducing Q-value overestimation.
- Representation collapse is prevented because the embedder is trained to reconstruct states at multiple time offsets.
- The error bound supplies a concrete, computable criterion for deciding when to trust stored episodes rather than relying on hand-tuned thresholds.
- The same consistency check can be applied at retrieval time, so memory use scales with demonstrated trajectory quality rather than raw return.
Where Pith is reading between the lines
- If the error bound generalizes beyond the tested domains, similar consistency gates could be added to single-agent episodic methods without changing their core replay logic.
- The approach implies that future memory architectures might benefit from making the consistency signal itself a learned auxiliary objective rather than a fixed post-hoc filter.
- A natural next measurement would be whether the same gating rule improves sample efficiency when the underlying task distribution shifts between training and test episodes.
Load-bearing premise
The observable temporal consistency error computed from the embedder serves as a direct and unbiased indicator of whether a stored trajectory is near-optimal.
What would settle it
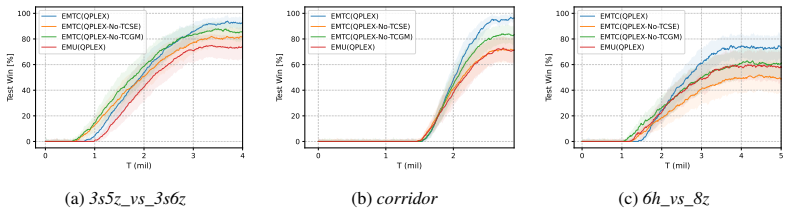
Run the same SMAC and GRF evaluations with the gating mechanism disabled while keeping the embedder; if win-rate gains disappear or reverse, the claim that consistency error reliably selects good trajectories would be falsified.
Figures
read the original abstract
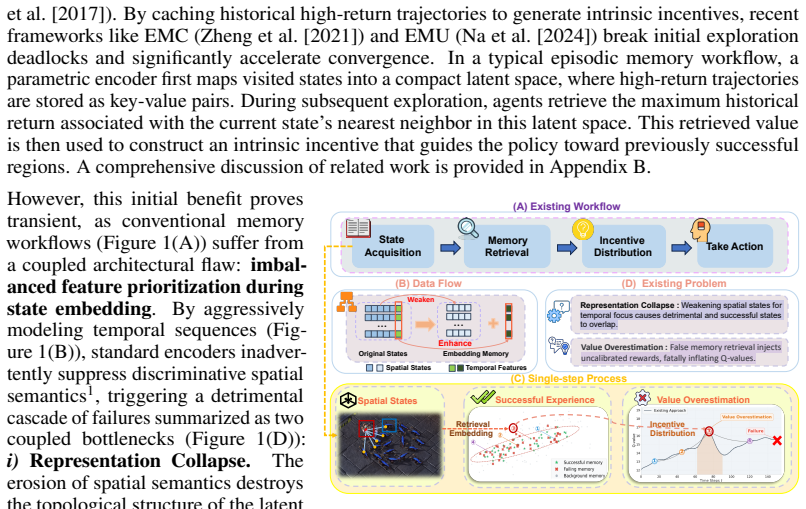
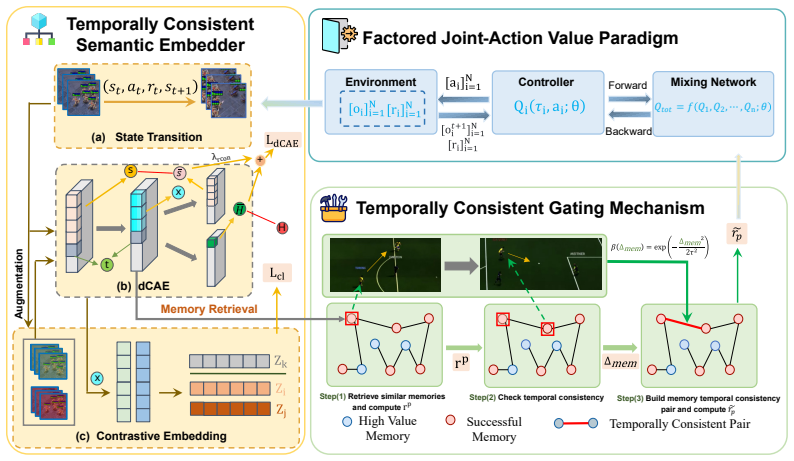
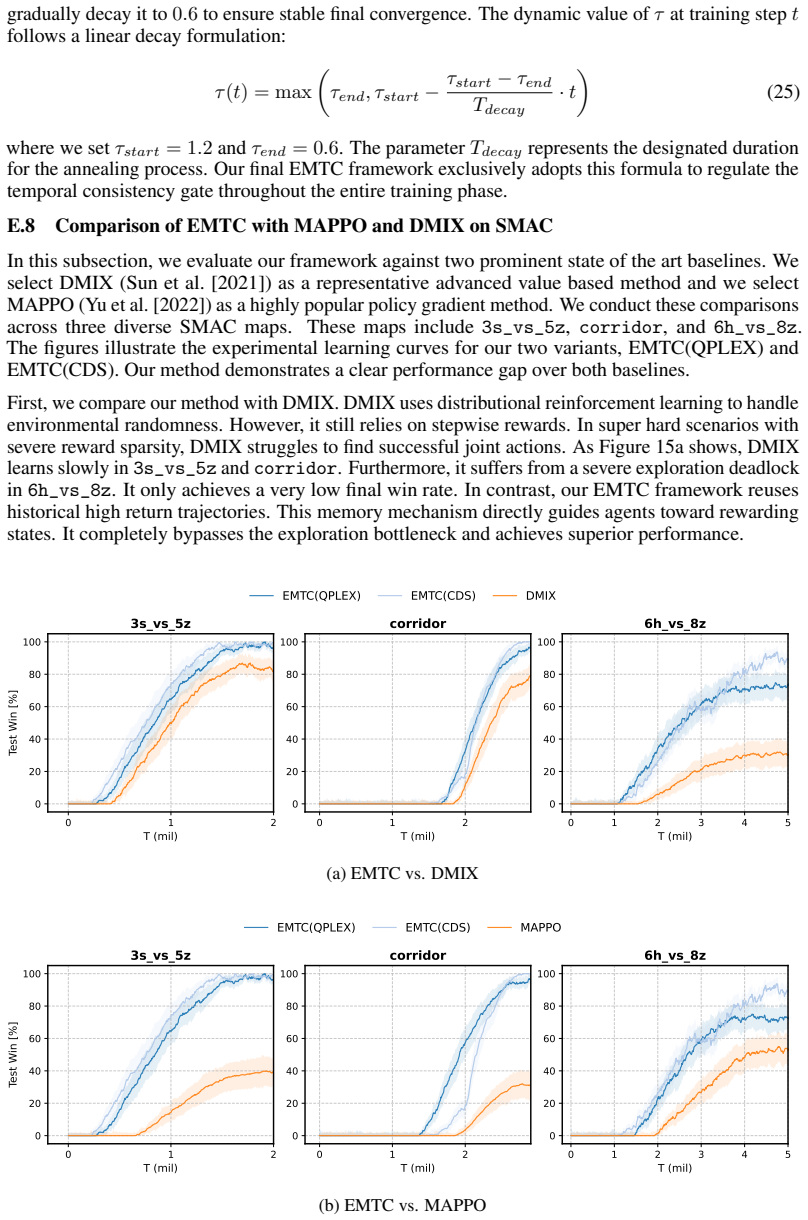
Cooperative Multi-Agent Reinforcement Learning (MARL) frequently suffers from severe reward sparsity and exploration bottlenecks. While episodic memory mechanisms mitigate these issues by reusing high-return trajectories, they often trap agents in local optima due to unconstrained incentive distribution and semantic representation collapse. To address this, we propose Episodic Memory Temporal Consistency (EMTC), a framework that robustly constructs and selectively leverages historical experiences. EMTC introduces two synergistic components: (1) a Temporally Consistent Semantic Embedder that integrates contrastive learning with time-conditioned state reconstruction, preventing representation collapse and enabling precise memory retrieval; and (2) a Temporal Consistency Gating Mechanism that dynamically modulates episodic incentives based on temporal consistency error. This adaptive gate filters misleading signals from pseudo-successful trajectories, effectively mitigating Q-value overestimation. We provide theoretical guarantees, establishing a strict error bound that directly links the observable temporal consistency error to the underlying trajectory optimality and representation quality. Extensive evaluations on the SMAC and GRF benchmarks demonstrate that EMTC consistently outperforms state-of-the-art baselines. Notably, compared to the strongest episodic baseline, EMTC achieves absolute win-rate improvements of up to 24% in super-hard SMAC scenarios and an average improvement of 28% across GRF tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Episodic Memory Temporal Consistency (EMTC) for cooperative MARL to address reward sparsity and exploration issues. It introduces a Temporally Consistent Semantic Embedder combining contrastive learning with time-conditioned state reconstruction, and a Temporal Consistency Gating Mechanism that uses temporal consistency error to modulate episodic incentives and filter pseudo-successful trajectories. The work claims theoretical guarantees via a strict error bound linking the observable temporal consistency error to trajectory optimality and representation quality, plus empirical gains of up to 24% win-rate in super-hard SMAC and 28% average on GRF over strong episodic baselines.
Significance. If the error bound derivation is non-circular and the gating mechanism transfers the guarantee without unstated selection bias or fitted thresholds, EMTC would supply a principled, observable criterion for experience filtering in episodic MARL that directly mitigates Q-overestimation and local-optima trapping. The empirical margins on standard benchmarks would then constitute a meaningful advance over prior episodic-memory MARL methods.
major comments (2)
- [Theoretical analysis] Theoretical analysis section: the manuscript asserts a 'strict error bound' that directly links temporal consistency error (from the embedder) to trajectory optimality and representation quality, yet supplies no derivation steps, no statement of assumptions (e.g., unbiased trajectory sampling), and no indication whether the bound is independent of the gating threshold or reduces by construction once the gate is applied. Because the gating mechanism is load-bearing for the claimed mitigation of misleading signals, this omission prevents verification that the theoretical guarantee supports the reported empirical improvements.
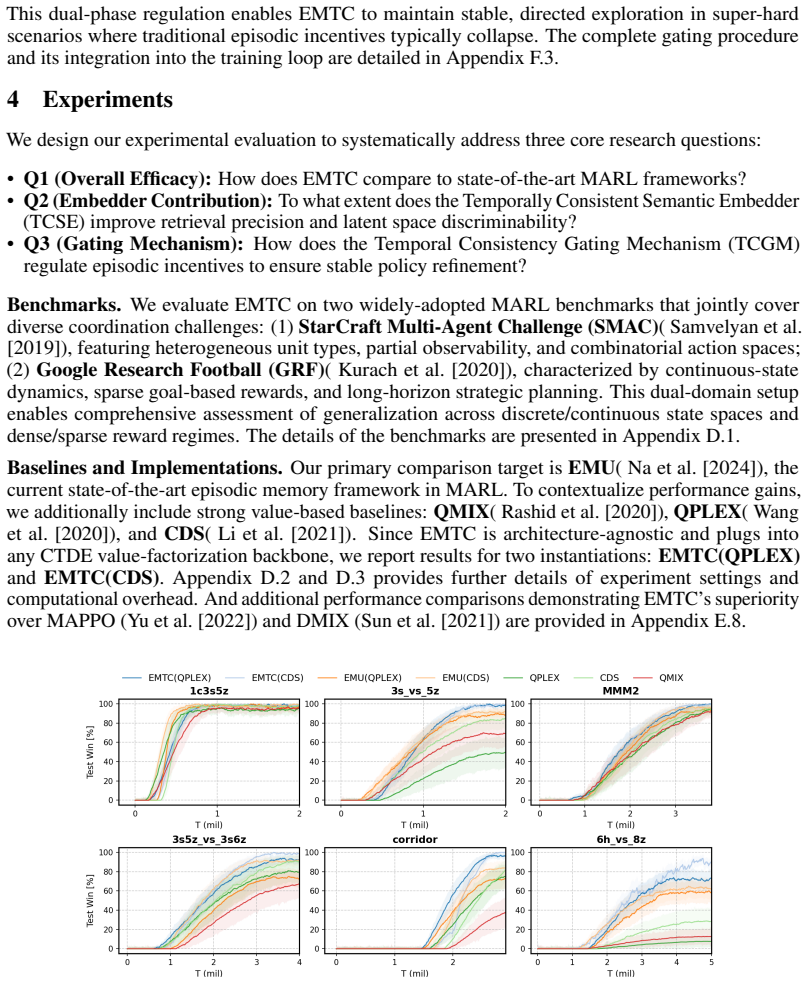
- [Empirical evaluation] §4 (or equivalent empirical section), Table 2/3: the reported absolute win-rate gains (up to 24% on super-hard SMAC, 28% average on GRF) are presented without error-bar details, number of random seeds, or statistical significance tests against the strongest episodic baseline. Given that the central claim rests on the gating mechanism reliably selecting higher-quality trajectories, the absence of these controls leaves open whether the gains are robust or could be explained by variance or implementation differences.
minor comments (2)
- [Method] Notation for the temporal consistency error and the gating function should be introduced with explicit equations rather than prose descriptions only, to allow readers to trace how the observable quantity enters the bound.
- [Abstract/Introduction] The abstract and introduction should clarify whether any additional hyperparameters (beyond the embedder and gate) are required to operationalize the error bound in practice.
Simulated Author's Rebuttal
Thank you for the detailed review and constructive feedback. We appreciate the opportunity to clarify the theoretical analysis and strengthen the empirical evaluation. We address each major comment below.
read point-by-point responses
-
Referee: [Theoretical analysis] Theoretical analysis section: the manuscript asserts a 'strict error bound' that directly links temporal consistency error (from the embedder) to trajectory optimality and representation quality, yet supplies no derivation steps, no statement of assumptions (e.g., unbiased trajectory sampling), and no indication whether the bound is independent of the gating threshold or reduces by construction once the gate is applied. Because the gating mechanism is load-bearing for the claimed mitigation of misleading signals, this omission prevents verification that the theoretical guarantee supports the reported empirical improvements.
Authors: We agree with the referee that the derivation steps, assumptions, and relation to the gating threshold need to be explicitly detailed to allow verification. In the revised manuscript, we will expand the theoretical analysis section to include the full derivation, state all assumptions, and clarify the independence from the gating threshold. This will address the concern regarding circularity and support for the empirical improvements. revision: yes
-
Referee: [Empirical evaluation] §4 (or equivalent empirical section), Table 2/3: the reported absolute win-rate gains (up to 24% on super-hard SMAC, 28% average on GRF) are presented without error-bar details, number of random seeds, or statistical significance tests against the strongest episodic baseline. Given that the central claim rests on the gating mechanism reliably selecting higher-quality trajectories, the absence of these controls leaves open whether the gains are robust or could be explained by variance or implementation differences.
Authors: We agree that including error-bar details, the number of random seeds, and statistical significance tests is essential to demonstrate robustness. In the revised version, we will update Tables 2/3 to include these elements, ensuring the gains are statistically validated against the strongest baseline. revision: yes
Circularity Check
No circularity detected; theoretical bound presented independently of fitted inputs
full rationale
The abstract and description claim a strict error bound linking observable temporal consistency error to trajectory optimality, but provide no equations, self-citations, or derivations that reduce this bound to a fitted parameter, self-definition, or prior author result by construction. The gating mechanism and embedder are described as synergistic components without evidence that the bound is statistically forced or renamed from known patterns. Empirical gains are reported separately, and no load-bearing self-citation chain or ansatz smuggling appears in the given text. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
C. Blundell et al. Model-free episodic control.arXiv preprint arXiv:1606.04460,
work page internal anchor Pith review Pith/arXiv arXiv
-
[2]
doi: 10.1002/rsa.10073. S. Fujimoto, H. Hoof, and D. Meger. Addressing function approximation error in actor-critic methods. InInternational conference on machine learning, pages 1587–1596. PMLR,
-
[3]
Z. Lin, T. Zhao, G. Yang, et al. Episodic memory deep Q-networks.arXiv preprint arXiv:1805.07603,
work page internal anchor Pith review Pith/arXiv arXiv
- [4]
-
[5]
M. Samvelyan, T. Rashid, C. S. De Witt, G. Farquhar, N. Nardelli, B. Peng, L. Cassici, J. Foerster, and S. Whiteson. The StarCraft multi-agent challenge.arXiv preprint arXiv:1902.04043,
-
[6]
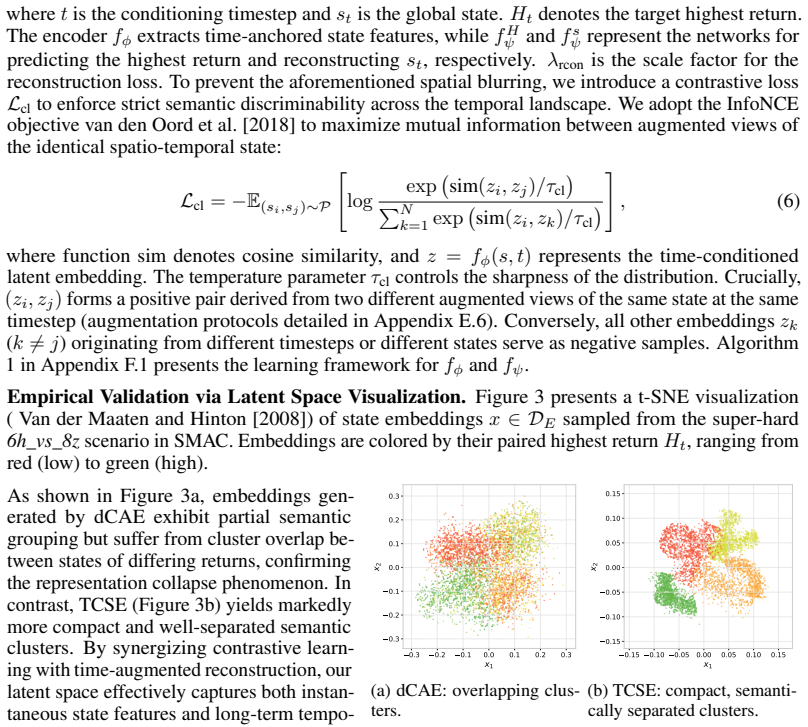
Representation Learning with Contrastive Predictive Coding
A. van den Oord, Y . Li, and O. Vinyals. Representation learning with contrastive predictive coding. arXiv preprint arXiv:1807.03748,
work page internal anchor Pith review Pith/arXiv arXiv
-
[7]
Van Hasselt, A
H. Van Hasselt, A. Guez, and D. Silver. Deep reinforcement learning with double q-learning. In Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence (AAAI), pages 2094–2100,
2094
- [8]
-
[9]
12 A Limitations and Future Work While the proposed Episodic Memory Temporal Consistency (EMTC) framework demonstrates significant improvements in sample efficiency and asymptotic performance across challenging coop- erative MARL benchmarks, it is not without limitations. We explicitly acknowledge the following aspects, which present exciting avenues for ...
2019
-
[10]
All SMAC experiments were conducted on StarCraft II version 4.10.0 in a Linux environment
to execute all of the baseline algorithms with their open-source codes, and the same hyperparameters are used for experiments if they are presented either in uploaded codes or in their manuscripts. All SMAC experiments were conducted on StarCraft II version 4.10.0 in a Linux environment. For Google Research Football task, we use the environmental code pro...
2021
-
[11]
For EMTC (QPLEX) incorridor, δ= 1.8×10 −5 is used instead ofδ= 1.8×10 −3
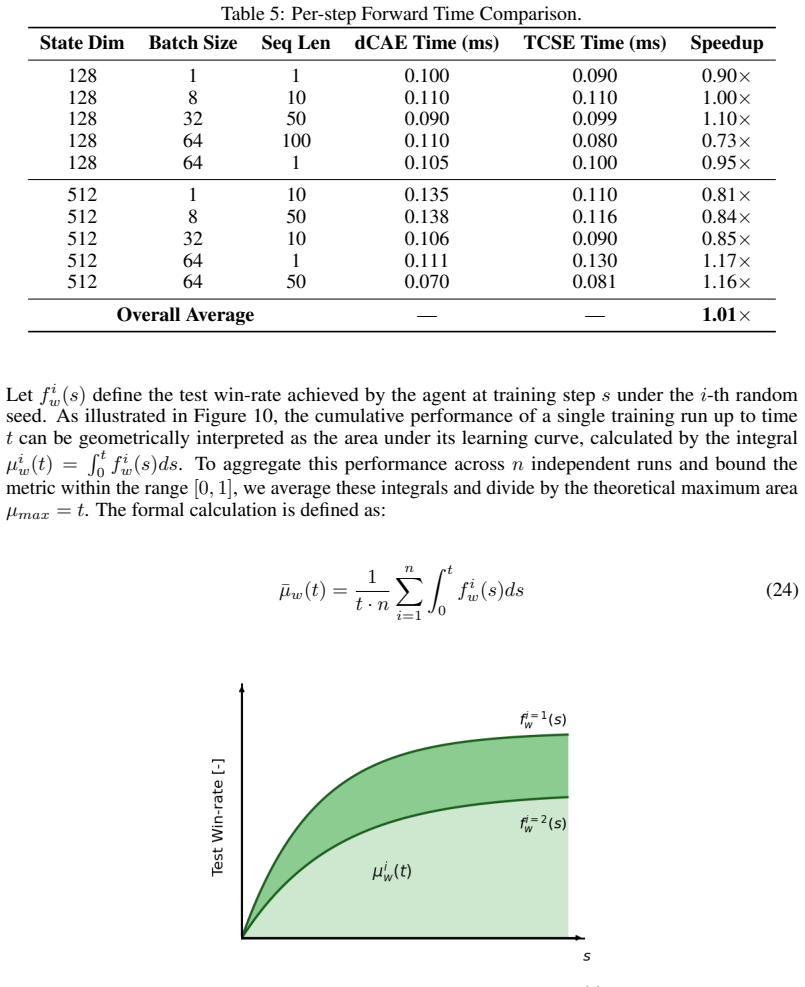
For other hyperparameters introduced by EMTC, the same values presented in Table 4 are used throughout all tasks. For EMTC (QPLEX) incorridor, δ= 1.8×10 −5 is used instead ofδ= 1.8×10 −3. Appendix E.7 presents the discussion aboutτ. D.3 Infrastructure and Computational Overhead All experiments for the SMAC and GRF environments were conducted on a computin...
-
[12]
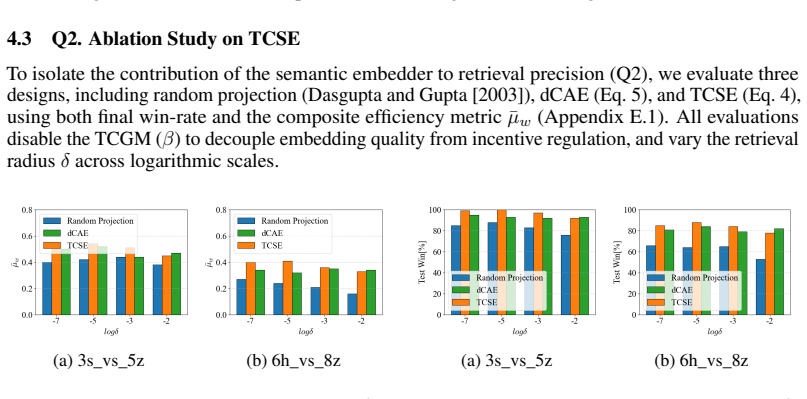
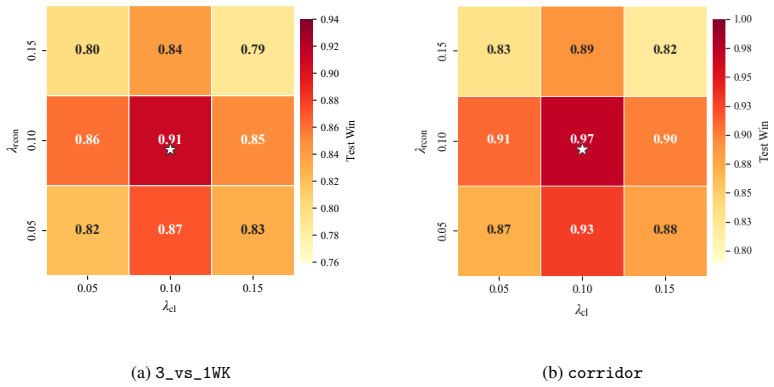
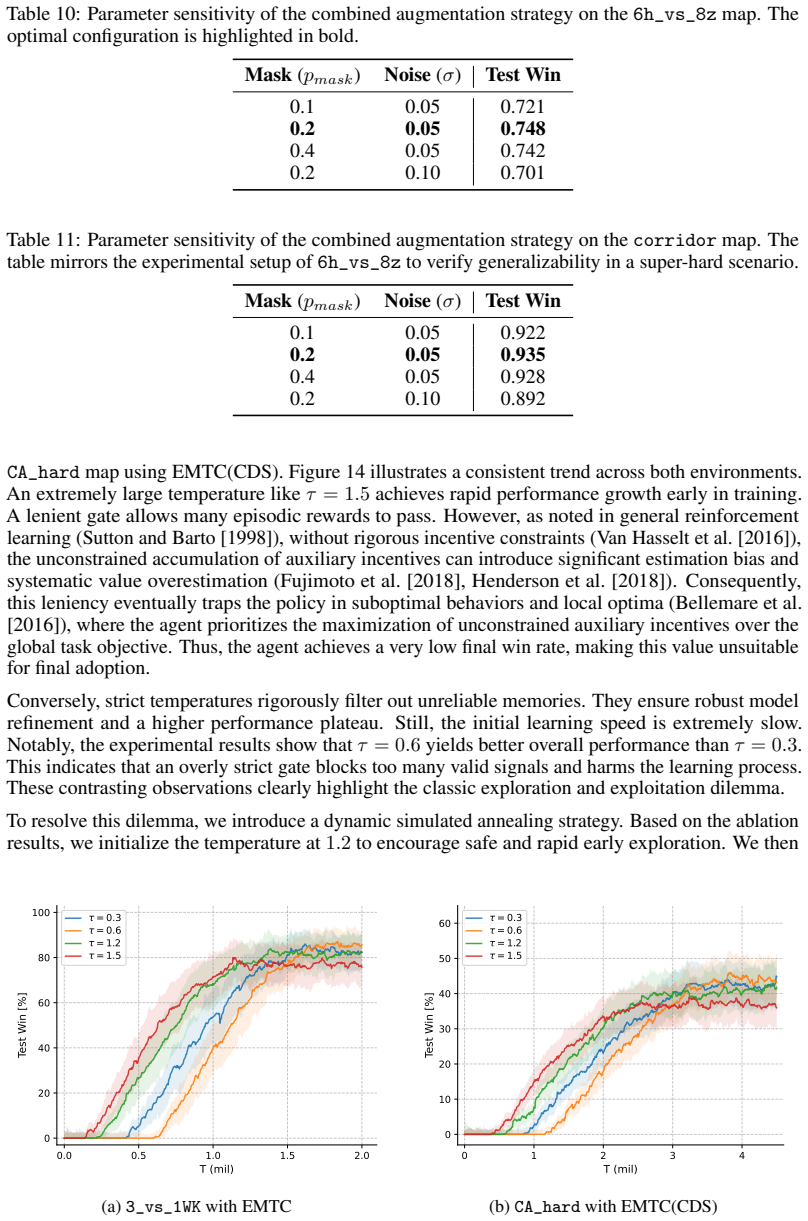
The empirical results consistently demonstrate that the framework achieves its peak performance at the optimal configuration of pmask = 0.2 and σ= 0.05 across both scenarios. For instance, insufficient masking ( pmask = 0.1 ) limits the regularization effect, making the semantic embedder prone to overfitting local features, while excessive noise (σ= 0.10 ...
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.