HRsR: Hierarchical Rotation System Reconstruction
Pith reviewed 2026-06-27 20:15 UTC · model grok-4.3
The pith
HRsR reconstructs point cloud meshes up to 6 times faster and with over 8 times less memory than RsR
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
HRsR performs reconstruction on a k-nearest neighbor simplified graph followed by quality-driven vertex splits and intersection handling, achieving up to a 6× speedup and more than 8× memory reduction over RsR while preserving topology control through the Euler characteristic.
What carries the argument
Hierarchical pipeline of edge collapses on a k-nearest neighbor graph followed by quality-driven vertex splits with intersection handling.
If this is right
- Topology-controlled reconstruction becomes feasible for larger point clouds.
- Memory usage drops by more than a factor of eight compared to sequential RsR.
- Geometric fidelity stays comparable to the original RsR method.
Where Pith is reading between the lines
- The hierarchical structure could be applied to accelerate other sequential reconstruction algorithms that rely on explicit topology tracking.
- This efficiency gain may support real-time or large-scale 3D scanning workflows where memory is constrained.
Load-bearing premise
Reconstruction on the k-nearest neighbor simplified graph followed by quality-driven vertex splits and intersection handling preserves the exact Euler characteristic topology control of RsR without introducing topological errors or geometric inconsistencies.
What would settle it
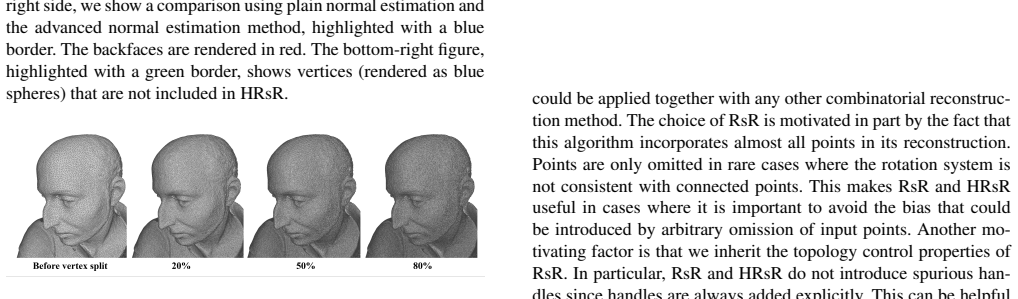
An input point cloud where the HRsR output mesh differs in Euler characteristic or contains topological defects absent from the RsR output on the same input.
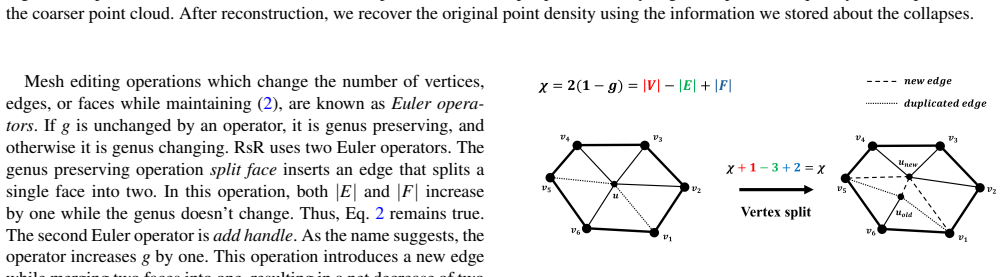
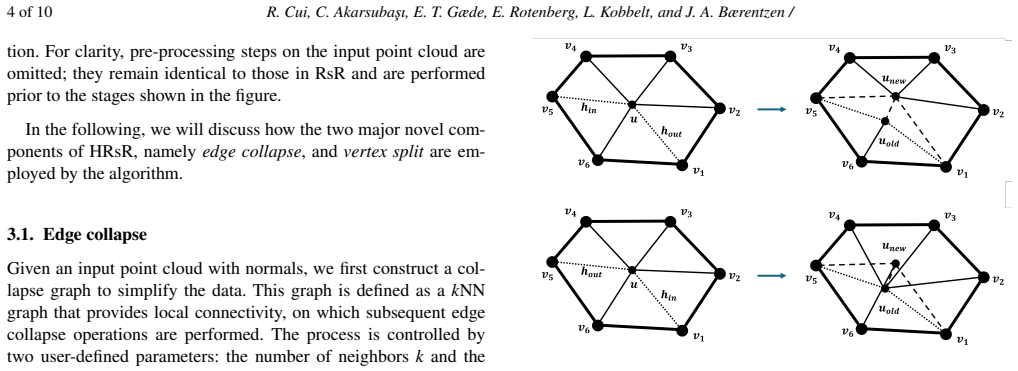
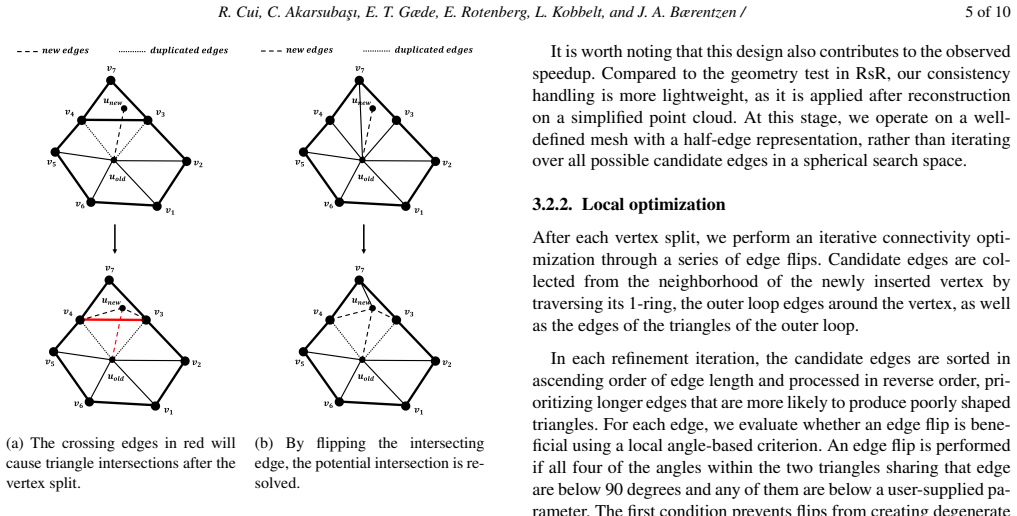
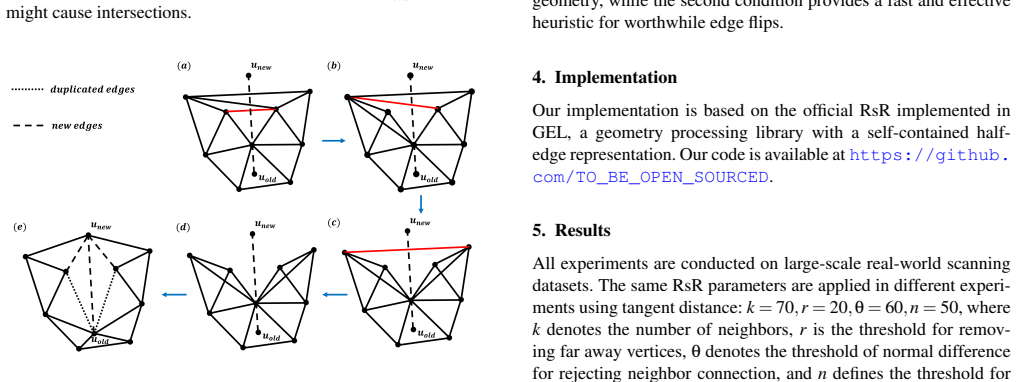
Figures

read the original abstract
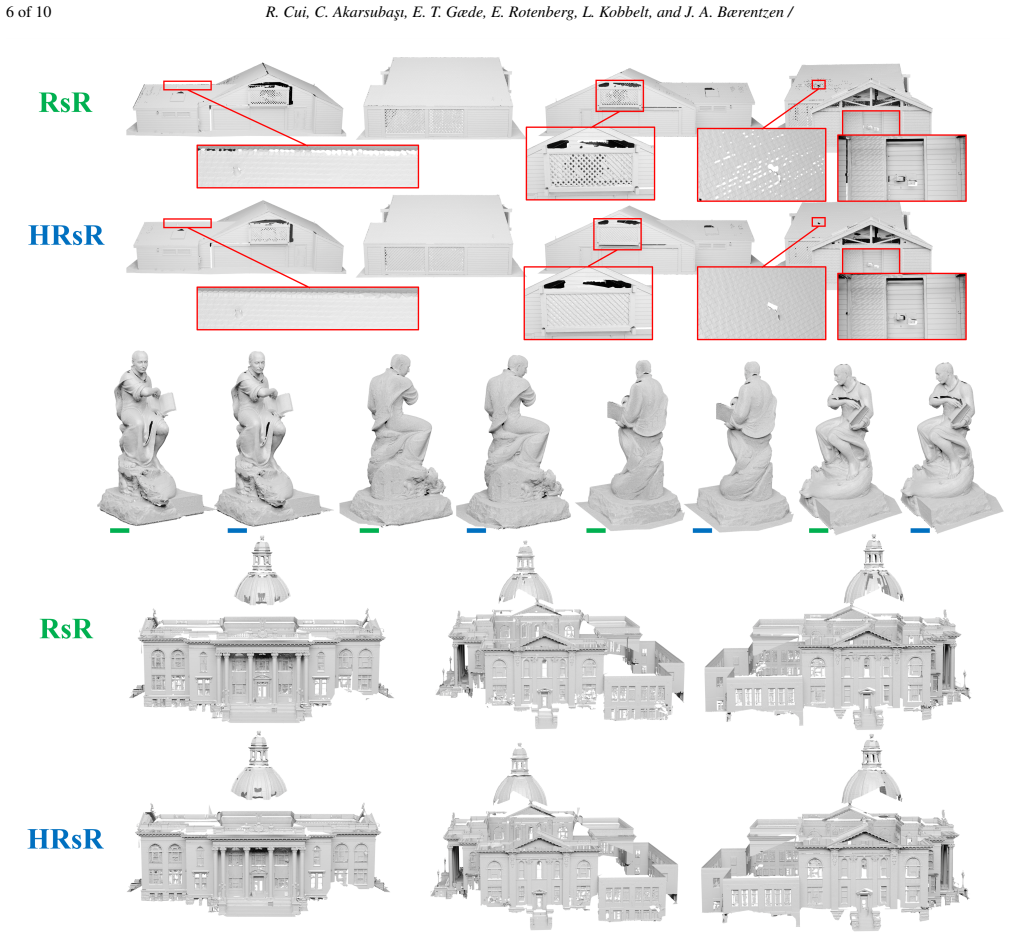
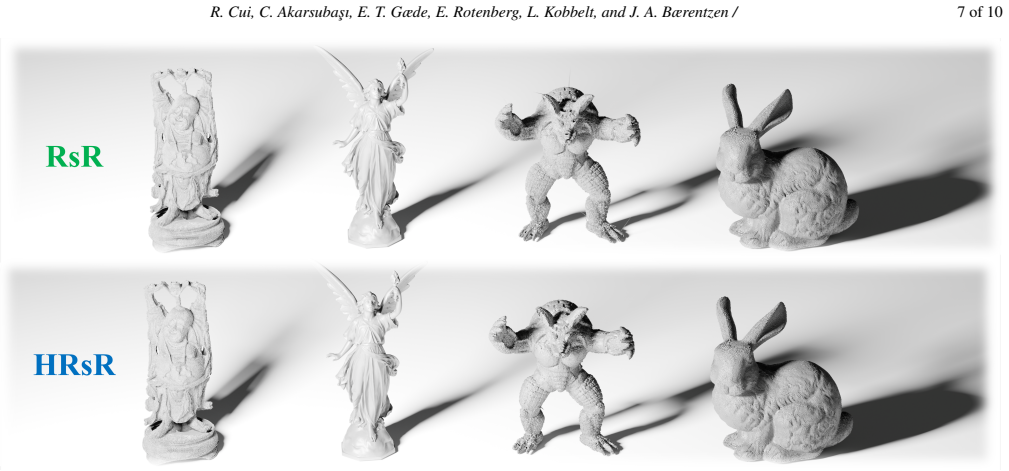
Surface reconstruction from point clouds remains challenging when both geometric fidelity and topology control are required. Rotation System Reconstruction (RsR) reconstructs triangle meshes from point clouds while explicitly controlling topology through the Euler characteristic, but its sequential edge insertion limits scalability. We present Hierarchical Rotation System Reconstruction (HRsR), which accelerates RsR through a hierarchical pipeline of edge collapses and vertex splits. HRsR first simplifies the input using a $k$-nearest neighbor graph, performs reconstruction on the reduced structure, and then restores geometric detail while preserving topology. To maintain geometric consistency, we incorporate intersection handling and quality-driven vertex split selection. Experiments demonstrate up to a $6\times$ speedup and more than $8\times$ reduction in memory usage over RsR, while achieving comparable reconstruction results.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces HRsR, a hierarchical extension of Rotation System Reconstruction (RsR) for triangle mesh reconstruction from point clouds. It simplifies the input via a k-nearest neighbor graph, performs RsR on the reduced structure, and restores detail via quality-driven vertex splits with intersection handling, claiming to preserve topology (Euler characteristic control) while achieving up to 6× speedup and >8× memory reduction with comparable results.
Significance. If the topology preservation claim holds with rigorous verification, the hierarchical pipeline would address a key scalability bottleneck in explicit-topology reconstruction methods, enabling larger point clouds in computational geometry while retaining manifold guarantees. The reported performance gains would be a practical contribution if supported by reproducible experiments.
major comments (2)
- [Abstract] Abstract (and method overview): the central claim that reconstruction on the k-NN simplified graph followed by quality-driven vertex splits 'preserves topology' and yields 'comparable reconstruction results' rests on an unverified assumption that these operations maintain the exact Euler characteristic control of original RsR. No invariant, proof, or check (e.g., pre/post Euler number comparison or rotation-system equivalence) is supplied showing that simplification does not alter the rotation system in a way that splits cannot recover, nor that quality-driven selection avoids genus changes. This is load-bearing for the performance claims.
- [Method description] The description of the hierarchical pipeline lacks any formal statement or algorithm showing how the rotation system is recovered or maintained across the simplification and split stages, making it impossible to confirm that the topology control property of RsR is exactly inherited rather than approximated.
minor comments (2)
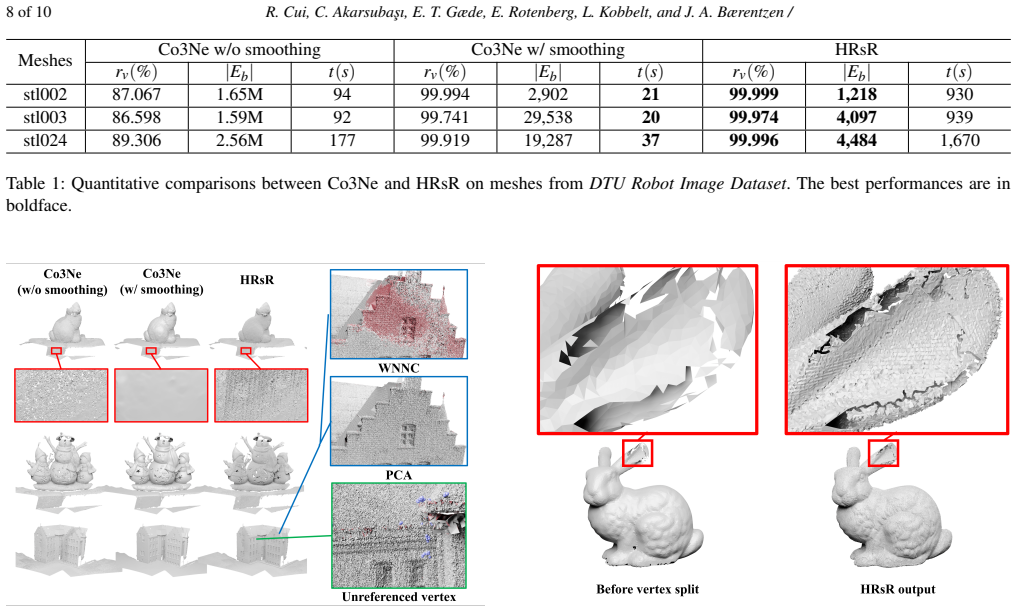
- The abstract states performance gains and 'comparable reconstruction results' but supplies no datasets, error metrics, or verification procedure; these must be detailed with tables/figures in the experimental section.
- Notation for the k-NN graph, quality metric for split selection, and intersection handling should be formalized with equations or pseudocode for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. The points raised regarding verification of topology preservation and formalization of the hierarchical pipeline are well taken, and we will revise the paper to address them directly.
read point-by-point responses
-
Referee: [Abstract] Abstract (and method overview): the central claim that reconstruction on the k-NN simplified graph followed by quality-driven vertex splits 'preserves topology' and yields 'comparable reconstruction results' rests on an unverified assumption that these operations maintain the exact Euler characteristic control of original RsR. No invariant, proof, or check (e.g., pre/post Euler number comparison or rotation-system equivalence) is supplied showing that simplification does not alter the rotation system in a way that splits cannot recover, nor that quality-driven selection avoids genus changes. This is load-bearing for the performance claims.
Authors: We agree that the manuscript does not currently supply explicit invariants, proofs, or empirical checks (such as pre/post Euler characteristic comparisons) to verify that the k-NN simplification and quality-driven splits exactly inherit RsR's topology control. In the revision we will add both a brief theoretical argument explaining why the operations preserve the rotation system and Euler characteristic, together with experimental tables reporting Euler numbers before and after each stage on the benchmark models. revision: yes
-
Referee: [Method description] The description of the hierarchical pipeline lacks any formal statement or algorithm showing how the rotation system is recovered or maintained across the simplification and split stages, making it impossible to confirm that the topology control property of RsR is exactly inherited rather than approximated.
Authors: We acknowledge that the current method section provides only a high-level description. The revised manuscript will include a formal statement of the rotation-system invariant maintained by the edge-collapse simplification and a pseudocode algorithm for the quality-driven vertex-split restoration phase, explicitly showing how the original RsR rotation system is recovered without introducing genus changes. revision: yes
Circularity Check
No circularity: method is algorithmic extension validated by experiments
full rationale
The paper presents HRsR as a hierarchical pipeline (k-NN simplification, reconstruction on reduced graph, quality-driven splits with intersection handling) that accelerates the prior RsR method. No equations, parameters, or predictions are shown to reduce by construction to fitted inputs or self-citations. Topology preservation is asserted via the pipeline design and supported by experimental comparison of reconstruction results, not by redefining inputs as outputs. The derivation chain is self-contained as a practical algorithm with external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Surface Reconstruction Using Rotation Systems , year =
Cui, Ruiqi and G. Surface Reconstruction Using Rotation Systems , year =. doi:10.1145/3687956 , journal =
-
[2]
and Bolitho, Matthew and Hoppe, Hugues , booktitle =
Kazhdan, Michael M. and Bolitho, Matthew and Hoppe, Hugues , booktitle =
-
[3]
ACM Transactions on Graphics (ToG) , volume=
Screened poisson surface reconstruction , author=. ACM Transactions on Graphics (ToG) , volume=. 2013 , publisher=
2013
-
[4]
Computer Graphics Forum , volume=
Poisson surface reconstruction with envelope constraints , author=. Computer Graphics Forum , volume=. 2020 , organization=
2020
-
[5]
ACM Transactions on Graphics (TOG) , volume=
Variational implicit point set surfaces , author=. ACM Transactions on Graphics (TOG) , volume=. 2019 , publisher=
2019
-
[6]
ACM Transactions on Graphics (TOG) , volume=
Variational Surface Reconstruction Using Natural Neighbors , author=. ACM Transactions on Graphics (TOG) , volume=. 2025 , publisher=
2025
-
[7]
European conference on computer vision , pages=
Points2surf learning implicit surfaces from point clouds , author=. European conference on computer vision , pages=. 2020 , organization=
2020
-
[8]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Poco: Point convolution for surface reconstruction , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[9]
Proceedings of the 25th annual conference on Computer graphics and interactive techniques , pages=
A new Voronoi-based surface reconstruction algorithm , author=. Proceedings of the 25th annual conference on Computer graphics and interactive techniques , pages=
-
[10]
Proceedings of the sixteenth annual symposium on Computational geometry , pages=
A simple algorithm for homeomorphic surface reconstruction , author=. Proceedings of the sixteenth annual symposium on Computational geometry , pages=
-
[11]
Proceedings of the sixth ACM symposium on Solid modeling and applications , pages=
The power crust , author=. Proceedings of the sixth ACM symposium on Solid modeling and applications , pages=
-
[12]
Computer-Aided Design , volume=
Surface reconstruction by computing restricted voronoi cells in parallel , author=. Computer-Aided Design , volume=. 2017 , publisher=
2017
-
[13]
Wang, Pengfei and Wang, Zixiong and Xin, Shiqing and Gao, Xifeng and Wang, Wenping and Tu, Changhe , title =. 2022 , issue_date =. doi:10.1145/3533768 , journal =
-
[14]
IEEE transactions on visualization and computer graphics , volume=
The ball-pivoting algorithm for surface reconstruction , author=. IEEE transactions on visualization and computer graphics , volume=. 1999 , publisher=
1999
-
[15]
Computer Graphics Forum , volume=
Scale space meshing of raw data point sets , author=. Computer Graphics Forum , volume=. 2011 , organization=
2011
-
[16]
Computer graphics forum , volume=
Topology-Aware Surface Reconstruction for Point Clouds , author=. Computer graphics forum , volume=. 2020 , organization=
2020
-
[17]
Computer-Aided Design , volume=
Topology-controllable implicit surface reconstruction based on persistent homology , author=. Computer-Aided Design , volume=. 2022 , publisher=
2022
-
[18]
Computer Graphics Forum , volume=
Competing fronts for coarse--to--fine surface reconstruction , author=. Computer Graphics Forum , volume=. 2006 , organization=
2006
-
[19]
ACM Transactions on Graphics (TOG) , volume=
Interactive topology-aware surface reconstruction , author=. ACM Transactions on Graphics (TOG) , volume=. 2007 , publisher=
2007
-
[20]
Hoppe, Hugues , title =. 1996 , isbn =. doi:10.1145/237170.237216 , booktitle =
-
[21]
Discrete & computational geometry , volume=
Topological persistence and simplification , author=. Discrete & computational geometry , volume=. 2002 , publisher=
2002
-
[22]
ACM Transactions on Graphics , volume =
Arno Knapitsch and Jaesik Park and Qian-Yi Zhou and Vladlen Koltun , title =. ACM Transactions on Graphics , volume =
-
[23]
2014 IEEE Conference on Computer Vision and Pattern Recognition , pages=
Large scale multi-view stereopsis evaluation , author=. 2014 IEEE Conference on Computer Vision and Pattern Recognition , pages=. 2014 , organization=
2014
-
[24]
ACM Transactions on Graphics (TOG) , volume=
Fast and globally consistent normal orientation based on the winding number normal consistency , author=. ACM Transactions on Graphics (TOG) , volume=. 2024 , publisher=
2024
-
[25]
Proceedings of the 19th annual conference on computer graphics and interactive techniques , pages=
Surface reconstruction from unorganized points , author=. Proceedings of the 19th annual conference on computer graphics and interactive techniques , pages=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.