Edge-Constrained UAV Small-Object Detection with P2 Enhancement and Quantum-Inspired Lightweight Structure Search
Pith reviewed 2026-06-27 17:27 UTC · model grok-4.3
The pith
Adding a P2 high-resolution branch to YOLOX-Nano raises small-object AP by 31 percent on VisDrone while meeting edge constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
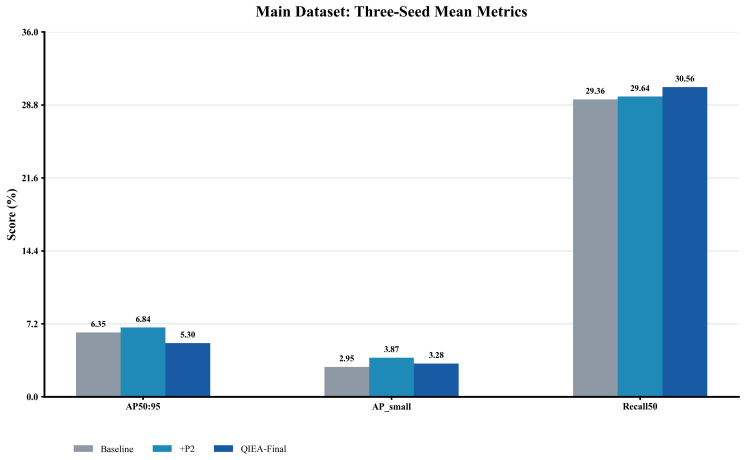
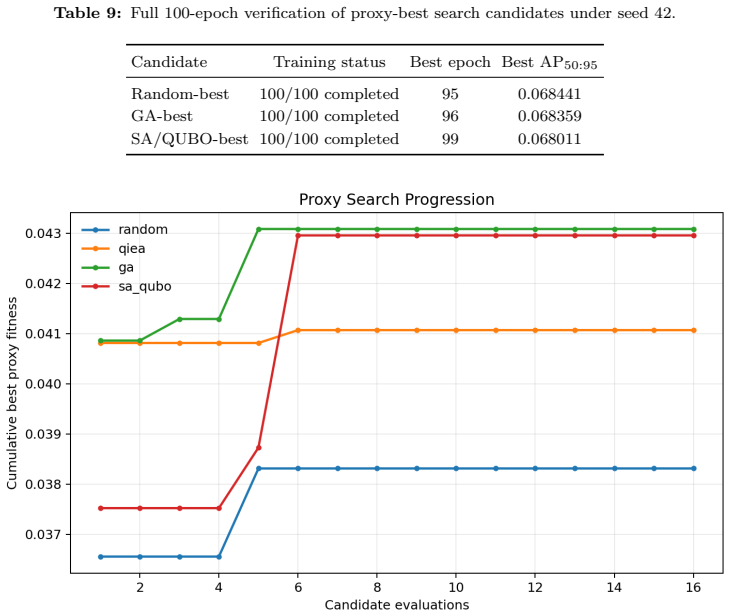
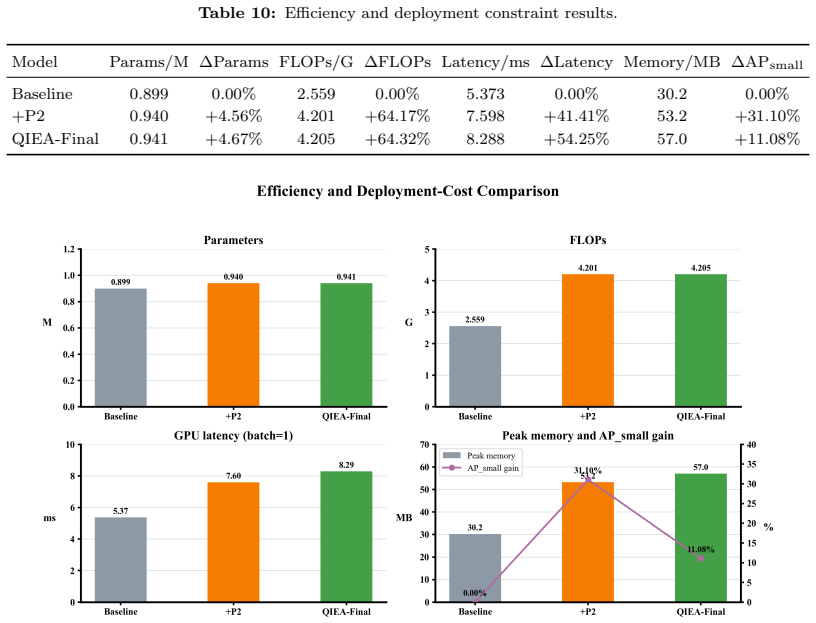
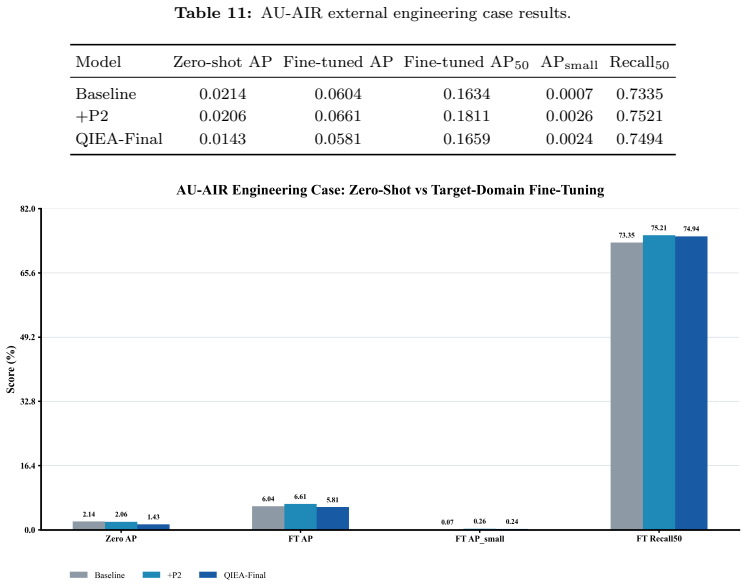
The central finding is that a P2 high-resolution detection branch added to YOLOX-Nano under edge constraints improves APsmall by 31.10 percent over the baseline on VisDrone. The same model also raises APs0.ss by 17.5 percent and APsmall by 44.9 percent relative to NanoDet-Plus at comparable size. QIEA screening yields a candidate with the highest recall, yet after full training the +P2 variant remains strongest on AP-oriented measures. Proxy orderings from the search do not reliably carry over to final AP values.
What carries the argument
The P2 high-resolution detection branch that retains shallow spatial information for small objects, paired with QIEA multi-objective screening over accuracy, FLOPs, latency, memory, and recall.
If this is right
- P2 serves as the main path for small-object gains in edge UAV detectors without added attention or fusion modules.
- QIEA supplies a practical tool for joint accuracy-cost screening of lightweight structures.
- Full training verification remains necessary because proxy rankings do not transfer directly to final AP.
- The approach supports compact detectors that preserve small-object details under onboard memory and compute limits.
Where Pith is reading between the lines
- The same P2 addition could be tested on other lightweight detectors to check whether the 30-plus percent small-object lift generalizes.
- Extending the search space to include more task-specific heads might further improve recall-oriented variants.
- If proxy-to-final mismatch persists, a cheaper early-stopping or partial-training predictor could reduce the cost of structure search.
Load-bearing premise
The multi-objective metrics and QIEA proxy rankings will identify structures whose accuracy after 100 epochs of training matches the proxy ordering.
What would settle it
Train the Random-best, GA-best, and SA/QUBO-best candidates for 100 epochs each and check whether their final AP values preserve the same ranking produced by the QIEA proxies.
Figures

read the original abstract
Unmanned aerial vehicle (UAV) object detection requires compact detectors that retain small-object details under onboard computation and memory constraints. Repeated downsampling inlightweight networks weakens shallow spatial information, while manually adding attention orfusion modules may increase cost without stable gains. This study analyzes YOLOX-Nano underedge-deployment constraints by combining a P2 high-resolution detection branch with a quantum-inspired evolutionary algorithm (QIEA) for lightweight structure screening. The search space isdefined by lightweight priority and task specificity, and the evaluation jointly considers accuracy,floating-point operations (FLOPs), latency, memory consumption, and recall. On VisDrone, theP2 branch increases APamall by 31.10% over the YOLOX-Nano baseline. Compared with NanoDet-Plus with similar model size, YOLOX-Nano+-P2 improves APs0.ss by 17.5% and APamal by 44.9%.The QIEA-selected candidate obtains the highest Recallso, but +P2 remains the strongest AP-oriented variant after full training. Full 100-epoch verification of Random-best, GA-best, andSA/QUBO-best candidates further shows that proxy rankings do not necessarily transfer to finalAPse9s. These results support using P2 as the main small-object enhancement path and QIEA as alightweight tool for candidate screening and accuracy-cost analysis. The source code, configurationfiles, diagnostic scripts, and summarized results are available at https://github.com/Ming23233/UAV-QIEA-Edge-Detection
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a P2 high-resolution detection branch to YOLOX-Nano for UAV small-object detection under edge constraints and applies a quantum-inspired evolutionary algorithm (QIEA) to screen lightweight network structures using a multi-objective proxy (accuracy, FLOPs, latency, memory, recall). On VisDrone it reports a 31.10% APsmall gain from the P2 branch over the YOLOX-Nano baseline and further gains versus NanoDet-Plus; the QIEA-selected model achieves highest recall but the paper notes that proxy rankings do not transfer to final 100-epoch AP, with +P2 remaining the strongest AP variant. Source code and scripts are released.
Significance. If the P2 branch gains prove robust, the work supplies a concrete, low-cost architectural change for preserving spatial detail in lightweight UAV detectors. The explicit release of code, configurations, diagnostic scripts, and summarized results is a clear strength that supports reproducibility and follow-on work. The QIEA component is presented as a screening tool rather than a guaranteed optimizer, which limits its claimed impact given the paper's own transferability caveat.
major comments (2)
- [Abstract] Abstract: the claim that QIEA provides effective 'lightweight structure screening' is undercut by the explicit statement that 'proxy rankings do not necessarily transfer to final APs' after 100-epoch verification of Random/GA/SA/QUBO candidates; this gap between proxy ordering and final AP is load-bearing for the search contribution and requires either stronger justification or additional experiments showing when the proxy is predictive.
- [Abstract] Abstract and evaluation sections: concrete percentage lifts (e.g., +31.10% APsmall, +44.9% APsmall vs. NanoDet-Plus) are reported without error bars, number of runs, dataset split details, or statistical tests, making it impossible to judge whether the observed differences exceed run-to-run variance.
minor comments (2)
- [Abstract] Abstract contains multiple typographical errors that impair readability: 'inlightweight', 'APamall', 'APs0.ss', 'APamal', 'APse9s'.
- The multi-objective evaluation criteria (accuracy + FLOPs + latency + memory + recall) are listed but the precise weighting or aggregation method used inside QIEA is not stated, complicating reproduction of the proxy ranking step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract claims and evaluation reporting. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that QIEA provides effective 'lightweight structure screening' is undercut by the explicit statement that 'proxy rankings do not necessarily transfer to final APs' after 100-epoch verification of Random/GA/SA/QUBO candidates; this gap between proxy ordering and final AP is load-bearing for the search contribution and requires either stronger justification or additional experiments showing when the proxy is predictive.
Authors: We agree the transferability gap is important and already note it explicitly in the manuscript. QIEA is positioned as a lightweight screening tool for multi-objective candidate ranking (accuracy, FLOPs, latency, memory, recall) rather than a guaranteed optimizer; the primary contribution remains the P2 branch, which yields the strongest final AP after full training. We will revise the abstract to emphasize this screening role and clarify that proxy-based selection is followed by 100-epoch verification, with +P2 confirmed as the top AP variant. No new experiments are added, but the existing verification results provide the justification. revision: yes
-
Referee: [Abstract] Abstract and evaluation sections: concrete percentage lifts (e.g., +31.10% APsmall, +44.9% APsmall vs. NanoDet-Plus) are reported without error bars, number of runs, dataset split details, or statistical tests, making it impossible to judge whether the observed differences exceed run-to-run variance.
Authors: We acknowledge the lack of error bars and statistical tests. All results use the standard VisDrone train/val/test splits with single runs per configuration under fixed seeds, due to edge-device compute constraints. We will update the abstract and evaluation sections to report the number of runs (one per model), add split details, and note the absence of variance analysis as a limitation. Error bars cannot be added without new multi-run experiments. revision: partial
Circularity Check
No circularity; all claims are empirical measurements against external baselines with explicit proxy limitations noted
full rationale
The paper reports measured AP improvements from adding a P2 branch and from QIEA-based candidate screening on VisDrone, with direct comparisons to YOLOX-Nano and NanoDet-Plus. No derivation, equation, or uniqueness claim reduces to a fitted parameter or self-citation by construction; the abstract itself states that proxy rankings do not transfer to final 100-epoch APs, confirming the results are falsifiable empirical outcomes rather than tautological. The search procedure is presented as a screening tool whose limitations are disclosed, not as a load-bearing theorem.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Vision Meets Drones: A Challenge
Zhu P, Wen L, Bian X, Ling H, and Hu Q. Vision Meets Drones: A Challenge. 2018. arXiv:1804.07437
Pith/arXiv arXiv 2018
-
[3]
DOTA: A Large-Scale Dataset for Object Detection in Aerial Images
Xia GS, Bai X, Ding J, et al. DOTA: A Large-Scale Dataset for Object Detection in Aerial Images. In:IEEE/CVF Con- ference on Computer Vision and Pattern Recognition. 2018.doi:10 . 1109 / CVPR . 2018.00418
arXiv 2018
-
[4]
VisDrone- DET2021: The Vision Meets Drone Ob- 17 ject Detection Challenge Results
Du D, Zhu P, Wen L, et al. VisDrone- DET2021: The Vision Meets Drone Ob- 17 ject Detection Challenge Results. IEEE Transactions on Pattern Analysis and Ma- chine Intelligence 2021
2021
-
[5]
Object Detection in UAV Im- ages: A Survey
Hu X et al. Object Detection in UAV Im- ages: A Survey. Remote Sensing 2024
2024
-
[6]
A Survey on Object Detection in Optical Remote Sensing Im- ages
Cheng G and Han J. A Survey on Object Detection in Optical Remote Sensing Im- ages. ISPRS Journal of Photogrammetry and Remote Sensing 2016
2016
-
[7]
Deep Learning in Remote Sensing: A Compre- hensive Review and List of Resources
Zhu XX, Tuia D, Mou L, et al. Deep Learning in Remote Sensing: A Compre- hensive Review and List of Resources. IEEE Geoscience and Remote Sensing Magazine 2017
2017
-
[8]
Feature pyramid networks for object detection,
Lin TY, Dollar P, Girshick R, He K, Har- iharan B, and Belongie S. Feature Pyra- mid Networks for Object Detection. In: IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition. 2017.doi: 10.1109/CVPR.2017.106
-
[9]
Focal Loss for Dense Object De- tection
Lin TY, Goyal P, Girshick R, He K, and Dollar P. Focal Loss for Dense Object De- tection. In:IEEE International Confer- ence on Computer Vision. 2017.doi:10. 1109/ICCV.2017.324
2017
-
[10]
FCOS: Fully Convolutional One-Stage Object De- tection
Tian Z, Shen C, Chen H, and He T. FCOS: Fully Convolutional One-Stage Object De- tection. In:IEEE International Confer- ence on Computer Vision. 2019.doi:10. 1109/ICCV.2019.00972
arXiv 2019
-
[11]
Deep Learning for Generic Object Detection: A Survey
Liu L, Ouyang W, Wang X, et al. Deep Learning for Generic Object Detection: A Survey. International Journal of Com- puter Vision 2020
2020
-
[12]
Faster R-CNN: Towards Real-Time Ob- ject Detection with Region Proposal Net- works
Ren S, He K, Girshick R, and Sun J. Faster R-CNN: Towards Real-Time Ob- ject Detection with Region Proposal Net- works. IEEE Transactions on Pattern Analysis and Machine Intelligence 2017
2017
-
[13]
Advances in Geophysical and Environmental Mechanics and Mathematics
Liu W, Anguelov D, Erhan D, et al. SSD: Single Shot MultiBox Detector. In:Eu- ropean Conference on Computer Vision. 2016.doi:10.1007/978- 3- 319- 46448- 0_2
-
[14]
Libra R-CNN: Towards Balanced Learning for Object Detection
Pang J, Chen K, Shi J, Feng H, Ouyang W, and Lin D. Libra R-CNN: Towards Balanced Learning for Object Detection. In:IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2019. doi:10.1109/CVPR.2019.00091
-
[15]
Zhang S, Chi C, Yao Y, Lei Z, and Li SZ. Bridging the Gap Between Anchor-Based and Anchor-Free Detection via Adaptive Training Sample Selection. In:IEEE/CVF Conference on Computer Vision and Pat- tern Recognition. 2020.doi:10 . 1109 / CVPR42600.2020.00978
arXiv 2020
-
[16]
YOLOX: Exceeding YOLO Series in 2021
Ge Z, Liu S, Wang F, Li Z, and Sun J. YOLOX: Exceeding YOLO Series in 2021
2021
-
[17]
Byte- Track: Multi-Object Tracking by Associ- ating Every Detection Box
Zhang Y, Sun P, Jiang Y, et al. Byte- Track: Multi-Object Tracking by Associ- ating Every Detection Box. In:European Conference on Computer Vision. 2022. doi:10.1007/978-3-031-20047-2_1
-
[18]
Edge Intelligence: Paving the Last Mile of Artificial Intelligence with Edge Computing
Zhou Z, Chen X, Li E, Zeng L, Luo K, and Zhang J. Edge Intelligence: Paving the Last Mile of Artificial Intelligence with Edge Computing. Proceedings of the IEEE 2019
2019
-
[19]
Convergence of Edge Computing and Deep Learning: A Com- prehensive Survey
Chen J and Ran X. Convergence of Edge Computing and Deep Learning: A Com- prehensive Survey. IEEE Access 2019
2019
-
[20]
Model Compression and Acceleration for Deep Neural Networks: The Princi- ples, Progress, and Challenges
Cheng Y, Wang D, Zhou P, and Zhang T. Model Compression and Acceleration for Deep Neural Networks: The Princi- ples, Progress, and Challenges. IEEE Sig- nal Processing Magazine 2018
2018
-
[21]
Efficient Deep Learning: A Survey on Making Deep Learning Models Smaller, Faster, and Better
Menghani G. Efficient Deep Learning: A Survey on Making Deep Learning Models Smaller, Faster, and Better. ACM Com- puting Surveys 2023. 18
2023
-
[22]
Clustered Object Detection in Aerial Images
Yang F, Fan H, Chu P, Blasch E, and Ling H. Clustered Object Detection in Aerial Images. In:IEEE International Confer- ence on Computer Vision. 2019.doi:10. 1109/ICCV.2019.00840
arXiv 2019
-
[23]
VistrongerDet: Stronger Visual Information for Object Detection in VisDrone Images
Wan F et al. VistrongerDet: Stronger Visual Information for Object Detection in VisDrone Images. In:IEEE/CVF In- ternational Conference on Computer Vi- sion Workshops. 2021.doi:10 . 1109 / ICCVW54120.2021.00316
arXiv 2021
-
[24]
Small Object Detection in UAV Images Based on YOLOv8n
Xu L, Zhao Y, Zhai Y, Huang L, and Ruan C. Small Object Detection in UAV Images Based on YOLOv8n. International Jour- nal of Computational Intelligence Systems 2024
2024
-
[25]
TA-YOLO: A Lightweight Small Object Detection Model Based on Multi-Dimensional Trans-Attention Mod- ule for Remote Sensing Images
Zhao X et al. TA-YOLO: A Lightweight Small Object Detection Model Based on Multi-Dimensional Trans-Attention Mod- ule for Remote Sensing Images. Complex & Intelligent Systems 2024
2024
-
[26]
UAV-YOLO: Small Object Detection on Unmanned Aerial Vehicle Perspective
Liu M et al. UAV-YOLO: Small Object Detection on Unmanned Aerial Vehicle Perspective. Sensors 2020
2020
-
[27]
Improved YOLOX-X Based UAV Aerial Photography Object Detection Al- gorithm
Wang X, He N, Hong C, Wang Q, and Chen M. Improved YOLOX-X Based UAV Aerial Photography Object Detection Al- gorithm. Image and Vision Computing 2023
2023
-
[28]
Small Target-YOLOv5: A Lightweight Small Object Detection Al- gorithm for UAV Aerial Images
Wang Y et al. Small Target-YOLOv5: A Lightweight Small Object Detection Al- gorithm for UAV Aerial Images. Sensors 2024
2024
-
[29]
SOD-YOLO: A Small Object Detection Method for UAV Images
Liu X et al. SOD-YOLO: A Small Object Detection Method for UAV Images. Re- mote Sensing 2024
2024
-
[30]
HSP-YOLOv8: A High- Speed and Precise Small Object Detection Method for UAV Aerial Images
Chen X et al. HSP-YOLOv8: A High- Speed and Precise Small Object Detection Method for UAV Aerial Images. Drones 2024
2024
-
[31]
Enhanced YOLOv8 for Small-Object Detection in Multiscale UAV Imagery: Innovations in Detection Accuracy and Efficiency
Luo W and Yuan S. Enhanced YOLOv8 for Small-Object Detection in Multiscale UAV Imagery: Innovations in Detection Accuracy and Efficiency. Digital Signal Processing 2025
2025
-
[32]
Dron- eVehicle: A Large-Scale Dataset for UAV- Based Vehicle Detection and Counting
Sun Y, Cao B, Zhu P, and Hu Q. Dron- eVehicle: A Large-Scale Dataset for UAV- Based Vehicle Detection and Counting. IEEE Transactions on Geoscience and Re- mote Sensing 2022
2022
-
[33]
Recent Ad- vances in Small Object Detection Based on Deep Learning: A Review
Tong K, Wu Y, and Zhou F. Recent Ad- vances in Small Object Detection Based on Deep Learning: A Review. Image and Vision Computing 2020
2020
-
[34]
Deep High-Resolution Representation Learning for Human Pose Estimation
Sun K, Xiao B, Liu D, and Wang J. Deep High-Resolution Representation Learning for Human Pose Estimation. In: IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition. 2019.doi: 10.1109/CVPR.2019.00584
-
[35]
Deep High-Resolution Representation Learning for Visual Recognition
Wang J, Sun K, Cheng T, et al. Deep High-Resolution Representation Learning for Visual Recognition. IEEE Transac- tions on Pattern Analysis and Machine In- telligence 2021
2021
-
[36]
Multi-Scale Feature Fusion for Object Detection in UAV Images
Li Y et al. Multi-Scale Feature Fusion for Object Detection in UAV Images. IEEE Access 2020
2020
-
[37]
Mo- bileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
Howard AG, Zhu M, Chen B, et al. Mo- bileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
-
[38]
MobileNetV2: In- verted Residuals and Linear Bottlenecks
Sandler M, Howard A, Zhu M, Zhmogi- nov A, and Chen LC. MobileNetV2: In- verted Residuals and Linear Bottlenecks. In:IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2018. doi:10.1109/CVPR.2018.00474
-
[39]
EfficientNet: Rethink- ing Model Scaling for Convolutional Neu- ral Networks
Tan M and Le QV. EfficientNet: Rethink- ing Model Scaling for Convolutional Neu- ral Networks. In:International Conference on Machine Learning. 2019. arXiv:1905. 11946. 19
2019
-
[40]
Efficient- Det: Scalable and Efficient Object De- tection
Tan M, Pang R, and Le QV. Efficient- Det: Scalable and Efficient Object De- tection. In:IEEE/CVF Conference on Computer Vision and Pattern Recogni- tion. 2020.doi:10 . 1109 / CVPR42600 . 2020.01079
arXiv 2020
-
[41]
Han S, Mao H, and Dally WJ. Deep Com- pression: Compressing Deep Neural Net- works with Pruning, Trained Quantiza- tion and Huffman Coding. In:Interna- tional Conference on Learning Represen- tations. 2016. arXiv:1510.00149
Pith/arXiv arXiv 2016
-
[42]
In: Proceed- ings of the 6th International Conference on Information Hiding
He Y, Lin J, Liu Z, Wang H, Li LJ, and Han S. AMC: AutoML for Model Com- pression and Acceleration on Mobile De- vices. In:European Conference on Com- puter Vision. 2018.doi:10.1007/978-3- 030-01234-2_48
-
[43]
Neu- ral Architecture Search: A Survey
Elsken T, Metzen JH, and Hutter F. Neu- ral Architecture Search: A Survey. Journal of Machine Learning Research 2019
2019
-
[44]
Designing Neural Networks Through Neuroevolution
Stanley KO, Clune J, Lehman J, and Mi- ikkulainen R. Designing Neural Networks Through Neuroevolution. Nature Machine Intelligence 2019
2019
-
[45]
ProxylessNAS: Direct Neural Architecture Search on Tar- get Task and Hardware
Cai H, Zhu L, and Han S. ProxylessNAS: Direct Neural Architecture Search on Tar- get Task and Hardware. In:International Conference on Learning Representations
-
[46]
Once-for-All: Train One Network and Specialize it for Efficient Deployment
Cai H, Gan C, Wang T, Zhang Z, and Han S. Once-for-All: Train One Network and Specialize it for Efficient Deployment. In:International Conference on Learn- ing Representations. 2020. arXiv:1908 . 09791
2020
-
[47]
Mnas- Net: Platform-Aware Neural Architecture Search for Mobile
Tan M, Chen B, Pang R, et al. Mnas- Net: Platform-Aware Neural Architecture Search for Mobile. In:IEEE/CVF Con- ference on Computer Vision and Pattern Recognition. 2019.doi:10 . 1109 / CVPR . 2019.00293
arXiv 2019
-
[48]
DARTS: Differentiable Architecture Search
Liu H, Simonyan K, and Yang Y. DARTS: Differentiable Architecture Search. In:In- ternational Conference on Learning Rep- resentations. 2019. arXiv:1806.09055
Pith/arXiv arXiv 2019
-
[49]
FBNet: Hardware-Aware Efficient ConvNet De- sign via Differentiable Neural Architec- ture Search
Wu B, Dai X, Zhang P, et al. FBNet: Hardware-Aware Efficient ConvNet De- sign via Differentiable Neural Architec- ture Search. In:IEEE/CVF Conference on Computer Vision and Pattern Recog- nition. 2019.doi:10.1109/CVPR.2019. 01100
-
[50]
NAS- FPN: Learning Scalable Feature Pyra- mid Architecture for Object Detection
Ghiasi G, Lin TY, and Le QV. NAS- FPN: Learning Scalable Feature Pyra- mid Architecture for Object Detection. In: IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition. 2019.doi: 10.1109/CVPR.2019.00721
-
[51]
Quantum-Inspired Evolutionary Algorithm for a Class of Combinatorial Optimization
Han KH and Kim JH. Quantum-Inspired Evolutionary Algorithm for a Class of Combinatorial Optimization. IEEE Trans- actions on Evolutionary Computation 2002
2002
-
[52]
Quantum-Inspired Evolutionary Algo- rithms for Feature Subset Selection: A Comprehensive Survey
Vivek Y, Ravi V, and Krishna PR. Quantum-Inspired Evolutionary Algo- rithms for Feature Subset Selection: A Comprehensive Survey. Preprint. 2024
2024
-
[53]
Feature Selection on Quantum Computers
Muecke S, Heese R, Mueller S, Wolter M, and Piatkowski N. Feature Selection on Quantum Computers. Quantum Machine Intelligence 2023
2023
-
[54]
An Quantum-Inspired Evolutionary Algo- rithm Applied to Design Optimizations of Electromagnetic Devices
Zhang W, Xu H, Bai Y, and Yang S. An Quantum-Inspired Evolutionary Algo- rithm Applied to Design Optimizations of Electromagnetic Devices. International Journal of Applied Electromagnetics and Mechanics 2012
2012
-
[55]
Scientometric Anal- ysis of Quantum-Inspired Metaheuristic Algorithms
Pooja and Sood SK. Scientometric Anal- ysis of Quantum-Inspired Metaheuristic Algorithms. Artificial Intelligence Review 2024. 20
2024
-
[56]
Quantum-Inspired Evolutionary Al- gorithm Applied to Neural Architecture Search
Szwarcman D, Civitarse D, and Vellasco M. Quantum-Inspired Evolutionary Al- gorithm Applied to Neural Architecture Search. Applied Soft Computing 2022
2022
-
[57]
Quantum Bridge Analytics I: A Tutorial on Formulating and Using QUBO Models
Glover F, Kochenberger G, and Du Y. Quantum Bridge Analytics I: A Tutorial on Formulating and Using QUBO Models. 4OR 2019
2019
-
[58]
Squeeze-and- Excitation Networks
Hu J, Shen L, and Sun G. Squeeze-and- Excitation Networks. In:IEEE/CVF Con- ference on Computer Vision and Pattern Recognition. 2018.doi:10 . 1109 / CVPR . 2018.00745
arXiv 2018
-
[59]
Coordi- nate Attention for Efficient Mobile Net- work Design
Hou Q, Zhou D, and Feng J. Coordi- nate Attention for Efficient Mobile Net- work Design. In:IEEE/CVF Conference on Computer Vision and Pattern Recog- nition. 2021.doi:10 . 1109 / CVPR46437 . 2021.01350
arXiv 2021
-
[60]
CBAM: Convolutional Block Atten- tion Module
Woo S, Park J, Lee JY, and Kweon IS. CBAM: Convolutional Block Atten- tion Module. In:European Conference on Computer Vision. 2018.doi:10 . 1007 / 978-3-030-01234-2_1
2018
-
[61]
Deformable Convolutional Networks
Dai J, Qi H, Xiong Y, et al. Deformable Convolutional Networks. In:IEEE Inter- national Conference on Computer Vision. 2017.doi:10.1109/ICCV.2017.89
-
[62]
Detec- toRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution
Qiao S, Chen LC, and Yuille A. Detec- toRS: Detecting Objects with Recursive Feature Pyramid and Switchable Atrous Convolution. In:IEEE/CVF Conference on Computer Vision and Pattern Recog- nition. 2021.doi:10 . 1109 / CVPR46437 . 2021.01008
arXiv 2021
-
[63]
In: 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition
Liu S, Qi L, Qin H, Shi J, and Jia J. Path Aggregation Network for Instance Segmentation. In:IEEE/CVF Conference on Computer Vision and Pattern Recog- nition. 2018.doi:10.1109/CVPR.2018. 00913
-
[64]
End-to- End Object Detection with Transformers
Carion N, Massa F, Synnaeve G, Usunier N, Kirillov A, and Zagoruyko S. End-to- End Object Detection with Transformers. In:European Conference on Computer Vi- sion. 2020.doi:10 . 1007 / 978 - 3 - 030 - 58452-8_13
2020
-
[65]
Barron, Ben Mildenhall, Matthew Tancik, Peter Hedman, Ricardo Martin-Brualla, and Pratul P
Liu Z, Lin Y, Cao Y, et al. Swin Trans- former: Hierarchical Vision Transformer Using Shifted Windows. In:IEEE/CVF International Conference on Computer Vision. 2021.doi:10.1109/ICCV48922. 2021.00986
-
[66]
AU-AIR: A Multi-modal Unmanned Aerial Ve- hicle Dataset for Low Altitude Traffic Surveillance
Bozcan I and Kayacan E. AU-AIR: A Multi-modal Unmanned Aerial Ve- hicle Dataset for Low Altitude Traffic Surveillance. In:IEEE/CVF Conference on Computer Vision and Pattern Recog- nition Workshops. 2020.doi:10 . 1109 / CVPRW50498.2020.00175. 21
arXiv 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.