Mobility Anomaly Generation using LLM-Driven Behavior with Kinematic Constraints
Pith reviewed 2026-06-27 13:42 UTC · model grok-4.3
The pith
A generative framework uses LLM agents to create large-scale annotated human trajectory anomaly datasets by modifying simulated paths under map constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
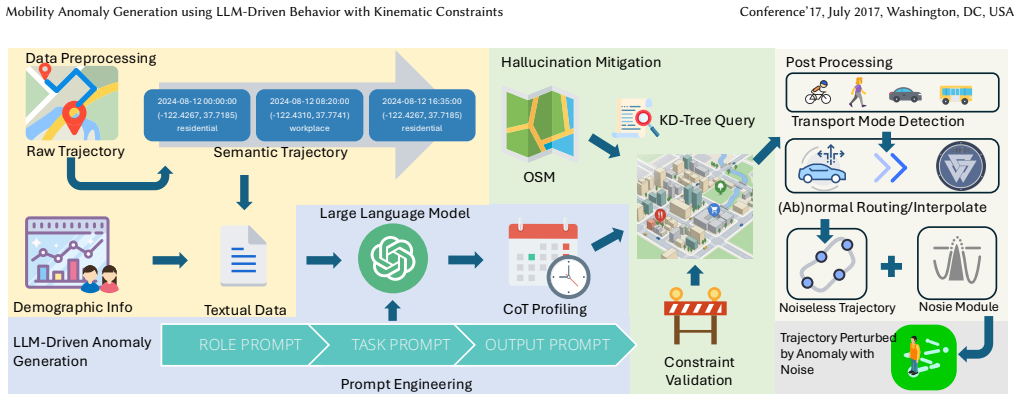
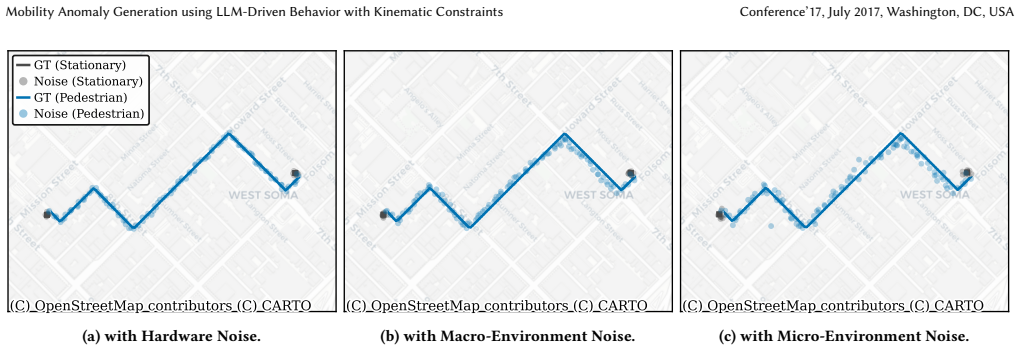
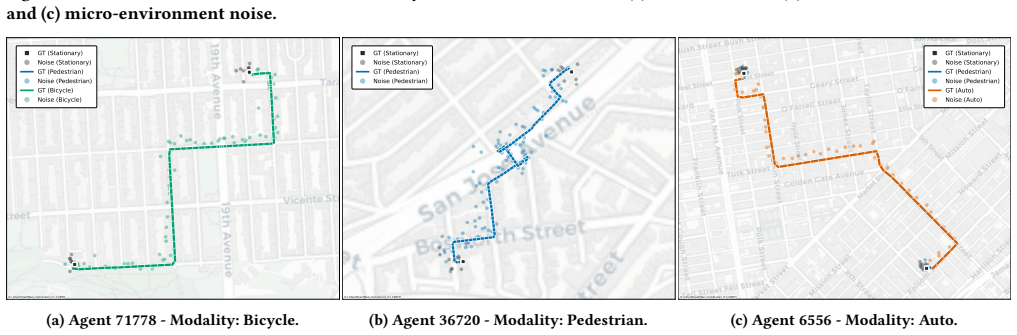
The paper introduces an end-to-end generative framework that synthesizes realistic trajectory anomalies at scale by operating on baseline simulated trajectories, employing LLM agents to inject semantically meaningful behavioral anomalies such as irregular out-of-distribution check-ins and skipped routine visits, applying map-constrained routing reconstruction to maintain physical validity, and augmenting the results with a context-aware spatial noise model parameterized by environmental variables.
What carries the argument
LLM agents that inject behavioral anomalies into baseline trajectories, followed by map-constrained routing reconstruction and context-aware spatial noise augmentation.
If this is right
- Enables training and evaluation of anomaly detection algorithms on large volumes of labeled mobility data.
- Supports systematic study of how different behavioral anomaly types affect trajectory patterns under realistic spatial constraints.
- Allows generation of datasets that incorporate both semantic intent from language models and physical validity from map routing.
- Reduces dependence on observational collection methods limited by event rarity and regulatory restrictions.
Where Pith is reading between the lines
- The same LLM-plus-constraint pipeline could be repurposed to generate anomalies in related domains such as vehicle or animal movement trajectories.
- Generated datasets could be validated by measuring how well models trained on them transfer to any newly observed real anomalies that become available through long-term monitoring.
- The framework opens the possibility of controlled experiments that vary anomaly type or noise level while holding map geometry fixed.
Load-bearing premise
LLM agents can reliably generate semantically meaningful anomalies and the combination of routing reconstruction plus location-specific noise produces trajectories close enough to real human mobility to serve as usable ground truth.
What would settle it
Anomaly detectors trained on the generated data achieve markedly lower precision or recall when tested against any rare real-world anomalous trajectories captured in existing mobility collections.
Figures

read the original abstract
Although the study of human trajectory anomalies is critical for advancing spatial data mining, empirical research remains severely hindered by a pervasive lack of ground-truth datasets. Despite the availability of several real-world and simulated human trajectory collections, these datasets exclusively capture normal mobility patterns and lack annotated anomalies. This specific scarcity is fundamentally driven by the inherent statistical rarity of anomalous events, precluding the feasibility of conventional observational methods. Compounding this challenge, the systematic acquisition of large-scale mobility data is strictly bottlenecked by prohibitive costs and stringent privacy regulations. To overcome these fundamental limitations and establish a reliable human trajectory anomalies dataset with annotated ground truth, we introduce a novel, end-to-end generative framework designed to synthesize realistic trajectory anomalies at scale. Our architecture bridges the gap between purely synthetic mobility data and complex real-world physical constraints by operating directly on baseline simulated trajectories. We employ Large Language Model (LLM) agents to systematically inject semantically meaningful behavioral anomalies such as irregular out-of-distribution check-ins and skipped routine visits. To ensure rigorous spatial validity, the system leverages map-constrained routing reconstruction to recalculate the physical transitions between these LLM agent-modified staypoints. Moreover, to narrow the simulation-to-reality gap, we augment the resulting trajectories with a context-aware spatial noise model, parameterized by environmental and location-specific variables, to accurately emulate heterogeneous GPS sensor degradation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces an end-to-end generative framework to synthesize realistic human trajectory anomalies at scale. It operates on baseline simulated trajectories by using LLM agents to inject semantic behavioral anomalies (e.g., irregular out-of-distribution check-ins and skipped routine visits), applies map-constrained routing reconstruction to maintain physical validity between modified staypoints, and augments the results with context-aware spatial noise parameterized by environmental variables to emulate GPS degradation, with the goal of producing large-scale annotated ground-truth datasets that address the scarcity caused by rarity of events and privacy constraints.
Significance. If the framework can be shown to generate anomalies whose statistical and semantic properties align with real-world distributions, it would address a fundamental bottleneck in spatial data mining by enabling reproducible empirical research on trajectory anomaly detection. The combination of LLM-driven semantic control with explicit kinematic and map constraints is a technically coherent direction for scalable synthetic data generation.
major comments (2)
- [Abstract] Abstract and proposed architecture: the central claim that the framework produces a 'reliable' and 'usable' ground-truth anomaly dataset rests entirely on untested assumptions about LLM-injected anomalies and the effectiveness of map-constrained routing plus context-aware noise in closing the simulation-to-reality gap. No empirical results, quantitative validation, downstream-task evaluation, or comparison against real anomaly distributions are presented, rendering the reliability claim unassessable.
- [Proposed Framework] The manuscript provides no experimental section, ablation studies, or metrics (e.g., distributional similarity, anomaly detection performance lift) that would allow assessment of whether the generated trajectories are realistic or whether the annotated labels are accurate. This absence is load-bearing for the paper's stated objective.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly identify that the current manuscript is a framework description without empirical validation, and we will revise accordingly to strengthen the work.
read point-by-point responses
-
Referee: [Abstract] Abstract and proposed architecture: the central claim that the framework produces a 'reliable' and 'usable' ground-truth anomaly dataset rests entirely on untested assumptions about LLM-injected anomalies and the effectiveness of map-constrained routing plus context-aware noise in closing the simulation-to-reality gap. No empirical results, quantitative validation, downstream-task evaluation, or comparison against real anomaly distributions are presented, rendering the reliability claim unassessable.
Authors: We agree that the abstract's claims regarding reliability and usability cannot be assessed without supporting evidence. The manuscript as submitted presents the end-to-end framework but contains no experimental results. In revision we will add an experimental section that includes quantitative validation (distributional similarity metrics, anomaly detection performance on downstream tasks) and comparisons against available real-world anomaly distributions where feasible. revision: yes
-
Referee: [Proposed Framework] The manuscript provides no experimental section, ablation studies, or metrics (e.g., distributional similarity, anomaly detection performance lift) that would allow assessment of whether the generated trajectories are realistic or whether the annotated labels are accurate. This absence is load-bearing for the paper's stated objective.
Authors: We acknowledge that the manuscript lacks an experimental section, ablation studies, and quantitative metrics. This is a substantive gap for evaluating the framework's output quality. We will incorporate these elements in the revised manuscript, including ablation studies on the LLM injection, routing, and noise components, along with metrics for realism and label accuracy. revision: yes
Circularity Check
No circularity: methodological framework with no derivations or self-referential reductions
full rationale
The paper describes an end-to-end generative framework using LLM agents for anomaly injection, map-constrained routing, and context-aware noise. No equations, fitted parameters, predictions, or self-citations appear in the provided text. The architecture is presented as a proposal without any load-bearing steps that reduce by construction to inputs. This matches the default expectation of no significant circularity for non-derivational papers.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
[n. d.]. GitHub - valhalla/valhalla: Open Source Routing Engine for Open- StreetMap — github.com. https://github.com/valhalla/valhalla/
-
[2]
Chanuka Algama, Taylor Anderson, Henrique Ferraz de Arruda, Andrew Crooks, Nathan Holt, Erfan Hosseini Sereshgi, John Hunter, Hamdi Kavak, Lance Kennedy, Yueyang Liu, Dieter Pfoser, Sandro Martinelli Reia, Doug Taylor, Mauryan Uppalapati, Boyu Wang, Carola Wenk, and Andreas Züfle. 2026. SF-LIFE: A Large-Scale Simulated Movement Dataset for the San Francis...
Pith/arXiv arXiv 2026
-
[3]
Hossein Amiri, Ruochen Kong, and Andreas Zufle. 2024. Urban Anomalies: A Sim- ulated Human Mobility Dataset with Injected Anomalies. arXiv:2410.01844 [cs.SI] https://arxiv.org/abs/2410.01844
arXiv 2024
-
[4]
Liam Barkley and Brink van der Merwe. 2024. Investigating the role of prompting and external tools in hallucination rates of large language models.arXiv preprint arXiv:2410.19385(2024)
arXiv 2024
-
[5]
C3S. 2018. ERA5 hourly data on single levels from 1940 to present. doi:10.24381/ CDS.ADBB2D47
2018
-
[6]
Serina Chang, Emma Pierson, Pang Wei Koh, Jaline Gerardin, Beth Redbird, David Grusky, and Jure Leskovec. 2021. Mobility network models of COVID-19 explain inequities and inform reopening.Nature589, 7840 (2021), 82–87. Mobility Anomaly Generation using LLM-Driven Behavior with Kinematic Constraints Conference’17, July 2017, Washington, DC, USA
2021
-
[7]
Eunjoon Cho, Seth A. Myers, and Jure Leskovec. 2011. Friendship and mobility: user movement in location-based social networks. InProceedings of the 17th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining(San Diego, California, USA)(KDD ’11). Association for Computing Machinery, New York, NY, USA, 1082–1090. doi:10.1145/2020408.2020579
-
[8]
Yuwei Du, Jie Feng, Jian Yuan, and Yong Li. 2025. CAMS: A CityGPT-Powered Agentic Framework for Urban Human Mobility Simulation. doi:10.48550/ARXIV. 2506.13599 Version Number: 1
work page internal anchor Pith review doi:10.48550/arxiv 2025
-
[9]
Minxuan Duan, Yinlong Qian, Lingyi Zhao, Zihao Zhou, Zeeshan Rasheed, Rose Yu, and Khurram Shafique. 2024. Back to Bayesics: Uncovering Human Mobility Distributions and Anomalies with an Integrated Statistical and Neural Framework. InProceedings of the 1st ACM SIGSPATIAL International Workshop on Geospatial Anomaly Detection. ACM, Atlanta GA USA, 56–67. d...
-
[10]
Elisa Gallon, Mathieu Joerger, and Boris Pervan. 2021. Robust modeling of GNSS tropospheric delay dynamics.IEEE Trans. Aerospace Electron. Systems57, 5 (2021), 2992–3003
2021
-
[11]
Song Gao, Jinmeng Rao, Yuhao Kang, Yunlei Liang, and Jake Kruse. 2020. Mapping county-level mobility pattern changes in the United States in response to COVID- 19.SIGSpatial Special12, 1 (2020), 16–26
2020
-
[12]
Chengkai Han, Jingyuan Wang, Yongyao Wang, Xie Yu, Hao Lin, Chao Li, and Junjie Wu. 2025. Bridging traffic state and trajectory for dynamic road network and trajectory representation learning. InProceedings of the AAAI Conference on Artificial Intelligence, Vol. 39. 11763–11771
2025
-
[13]
Thomas F Heston and Charya Khun. 2023. Prompt engineering in medical education.International Medical Education2, 3 (2023), 198–205
2023
-
[14]
Erfan Hosseini Sereshgi, Mauryan Uppalapati, Yueyang Liu, Lance Kennedy, Andreas Züfle, and Carola Wenk. 2025. Semantic Anomaly Detection in Human Trajectories: Preserving Behavioral Patterns Through Calendar Representations. InACM SIGSPATIAL GeoAnomalies Workshop (GeoAnomalies’25). ACM, Min- neapolis MN USA, 33–42. doi:10.1145/3764914.3770593
-
[15]
Xiaocheng Huang, Yifang Yin, Simon Lim, Guanfeng Wang, Bo Hu, Jagannadan Varadarajan, Shaolin Zheng, Ajay Bulusu, and Roger Zimmermann. 2019. Grab- Posisi: An Extensive Real-Life GPS Trajectory Dataset in Southeast Asia. In Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Prediction of Human Mobility(Chicago, IL, USA)(PredictGIS’19). Associ...
-
[16]
International GNSS Service (IGS). 1998. International GNSS Service (IGS) GNSS Final Daily Ionosphere Total Electron Content Grid product. doi:10.5067/GNSS/ GNSS_IGSIONOTEC_001
-
[17]
Ziyi Jiang, Qiqi Wang, Xuyang Sun, Gillian Dobbie, Xiaoling Lu, Yalei Du, Yuanyuan Zhang, and Kaiqi Zhao. 2025. RECAST: Route-Enhanced Conditional Anomalous Sub-trajectory Detection. InProceedings of the 33rd ACM International Conference on Advances in Geographic Information Systems. ACM, The Graduate Hotel Minneapolis Minneapolis MN USA, 357–369. doi:10....
-
[18]
Chenlu Ju, Jiaxin Liu, Shobhit Sinha, Hao Xue, and Flora Salim. 2025. Trajllm: A modular llm-enhanced agent-based framework for realistic human trajectory simulation. InCompanion Proceedings of the ACM on Web Conference 2025. 2847– 2850
2025
-
[19]
Joon-Seok Kim and Andreas Züfle. 2025. Grounded Anomalies: Towards Causally Grounded Kinematic Anomaly Generation. InProceedings of the 2nd ACM SIGSPA- TIAL International Workshop on Geospatial Anomaly Detection. 1–10
2025
-
[20]
John A Klobuchar. 1987. Ionospheric time-delay algorithm for single-frequency GPS users.IEEE Transactions on aerospace and electronic systems3 (1987), 325–331
1987
-
[21]
Ruochen Kong, Hossein Amiri, Yueyang Liu, Lance Kennedy, Misha Gupta, Joon- Seok Kim, and Andreas Züfle. 2024. Human Mobility Challenge: Are Transformers Effective for Human Mobility Prediction?. InACM SIGSPATIAL HuMob Workshop. 60–63
2024
-
[22]
Eva Krueger, Torben Schueler, and Bertram Arbesser-Rastburg. 2005. The stan- dard tropospheric correction model for the European satellite navigation system Galileo. 23–29 pages
2005
-
[23]
Siyu Li, Toan Tran, Haowen Lin, John Krumm, Cyrus Shahabi, Lingyi Zhao, Khurram Shafique, and Li Xiong. 2025. Geo-Llama: Leveraging LLMs for Human Mobility Trajectory Generation with Constraints. In2025 26th IEEE International Conference on Mobile Data Management (MDM). IEEE, 20–31
2025
-
[24]
Yihan Li, Xiyuan Fu, Ghanshyam Verma, Paul Buitelaar, and Mingming Liu. 2025. Mitigating Hallucination in Large Language Models (LLMs): An Application- Oriented Survey on RAG, Reasoning, and Agentic Systems.arXiv preprint arXiv:2510.24476(2025)
arXiv 2025
-
[25]
Ruirui Liu and Yiping Jiang. 2024. Overbounding multipath error in urban canyon with LSTM using multi-sensor features.IEEE Transactions on Intelligent Transportation Systems25, 9 (2024), 10926–10940
2024
-
[26]
Yueyang Liu, Lance Kennedy, Hossein Amiri, and Andreas Züfle. 2024. Neural Collaborative Filtering to Detect Anomalies in Human Semantic Trajectories. InProceedings of the 1st ACM SIGSPATIAL International Workshop on Geospa- tial Anomaly Detection(Atlanta, GA, USA)(GeoAnomalies ’24). Association for Computing Machinery, New York, NY, USA, 79–89. doi:10.11...
-
[27]
Antonio Martellucci and Roberto Prieto Cerdeira. 2009. Review of tropospheric, ionospheric and multipath data and models for global navigation satellite systems. In2009 3rd European Conference on Antennas and Propagation. 3697–3702
2009
-
[28]
John Pesavento, Andy Chen, Rayan Yu, Joon-Seok Kim, Hamdi Kavak, Taylor Anderson, and Andreas Züfle. 2020. Data-driven mobility models for COVID-19 simulation. InProceedings of the 3rd ACM SIGSPATIAL International Workshop on Advances in Resilient and Intelligent Cities. 29–38
2020
-
[29]
Claudio Piciarelli, Christian Micheloni, and Gian Luca Foresti. 2008. Trajectory- based anomalous event detection.IEEE Transactions on Circuits and Systems for video Technology18, 11 (2008), 1544–1554
2008
-
[30]
Arun Sharma, Mingzhou Yang, Majid Farhadloo, Subhankar Ghosh, Bharat Jayaprakash, and Shashi Shekhar. 2025. Towards Physics-informed Diffusion for Anomaly Detection in Trajectories: A Summary of Results. InProceedings of the 2nd ACM SIGSPATIAL International Workshop on Geospatial Anomaly Detection. ACM, Minneapolis MN USA, 11–24. doi:10.1145/3764914.3770595
-
[31]
Chris Stanford, Suman Adari, Xishun Liao, Yueshuai He, Qinhua Jiang, Chenchen Kuai, Jiaqi Ma, Emmanuel Tung, Yinlong Qian, Lingyi Zhao, Zihao Zhou, Zeeshan Rasheed, and Khurram Shafique. 2024. NUMOSIM: A Synthetic Mobility Dataset with Anomaly Detection Benchmarks. arXiv:2409.03024 [cs.LG] https://arxiv. org/abs/2409.03024
arXiv 2024
-
[32]
Jiawei Wang, Renhe Jiang, Chuang Yang, Zengqing Wu, Makoto Onizuka, Ryosuke Shibasaki, Noboru Koshizuka, and Chuan Xiao. 2024. Large language models as urban residents: An llm agent framework for personal mobility genera- tion.Advances in Neural Information Processing Systems37 (2024), 124547–124574
2024
-
[33]
Shengyuan Wang, Jie Feng, Tianhui Liu, Dan Pei, and Yong Li. 2025. Mitigating Geospatial Knowledge Hallucination in Large Language Models: Benchmarking and Dynamic Factuality Aligning. InFindings of the Association for Computational Linguistics: EMNLP 2025. 870–888
2025
-
[34]
Haomin Wen, Shurui Cao, and Leman Akoglu. 2025. CoBAD: Modeling Collective Behaviors for Human Mobility Anomaly Detection. doi:10.48550/arXiv.2508. 14088 arXiv:2508.14088 [cs]
-
[35]
Wilson Wongso, Hao Xue, and Flora D. Salim. 2026. Massive-STEPS: Massive Se- mantic Trajectories for Understanding POI Check-ins – Dataset and Benchmarks. arXiv:2505.11239 [cs.LG] https://arxiv.org/abs/2505.11239
arXiv 2026
-
[36]
Takahiro Yabe, Kota Tsubouchi, Toru Shimizu, Yoshihide Sekimoto, Kaoru Sezaki, Esteban Moro, and Alex Pentland. 2024. YJMob100K: City-scale and longitudinal dataset of anonymized human mobility trajectories.Scientific Data11, 1 (April 2024), 397. doi:10.1038/s41597-024-03237-9
-
[37]
Dingqi Yang, Daqing Zhang, Vincent W Zheng, and Zhiyong Yu. 2014. Modeling user activity preference by leveraging user spatial temporal characteristics in LBSNs.IEEE Transactions on Systems, Man, and Cybernetics: Systems45, 1 (2014), 129–142
2014
-
[38]
Kunyi Zhang, Yanbo Pang, Yurong Zhang, and Yoshihide Sekimoto. 2024. MobGLM: A large language model for synthetic human mobility generation. InProceedings of the 32nd ACM International Conference on Advances in Geo- graphic Information Systems. 629–632
2024
-
[39]
Yu Zheng. 2011. T-Drive trajectory data sample
2011
-
[40]
2011.Geolife GPS trajectory dataset - User Guide
Yu Zheng, Hao Fu, Xing Xie, Wei-Ying Ma, and Quannan Li. 2011.Geolife GPS trajectory dataset - User Guide
2011
-
[41]
Silin Zhou, Yao Chen, Shuo Shang, Lisi Chen, Bingsheng He, and Ryosuke Shibasaki. 2025. Blurred Encoding for Trajectory Representation Learning.arXiv preprint arXiv:2511.13741(2025)
arXiv 2025
-
[42]
Yuanshao Zhu, James Jianqiao Yu, Xiangyu Zhao, Xun Zhou, Liang Han, Xuetao Wei, and Yuxuan Liang. 2025. UniTraj: Learning a Universal Trajectory Founda- tion Model from Billion-Scale Worldwide Traces.Advances in Neural Information Processing Systems38 (2025)
2025
discussion (0)
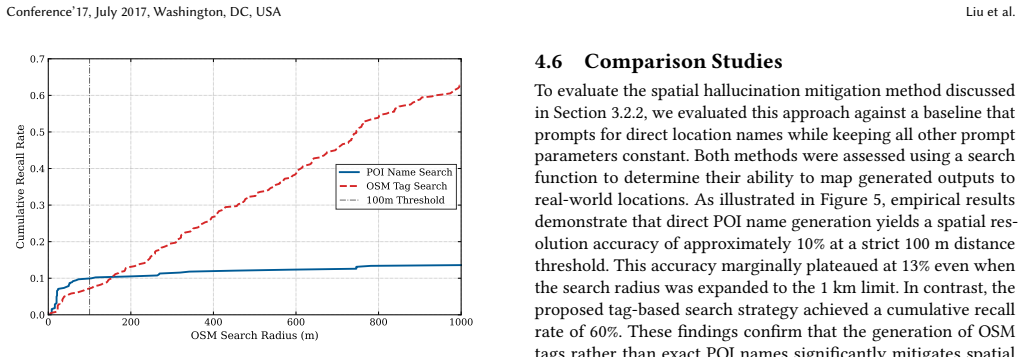
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.