Geometry-Aware Reinforcement Learning for 2D Irregular Nesting
Pith reviewed 2026-06-27 13:57 UTC · model grok-4.3
The pith
Reinforcement learning with a geometry-aware encoder achieves competitive performance on 2D irregular nesting by learning geometric priors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By coupling the Polygons Transformer with a Combinatorial Optimization Reinforcement Learning framework, the trained agent discovers and exploits geometric awareness for precise spatial tasks, reaching area utilization performance highly competitive with the state-of-the-art heuristic solver Sparrow.
What carries the argument
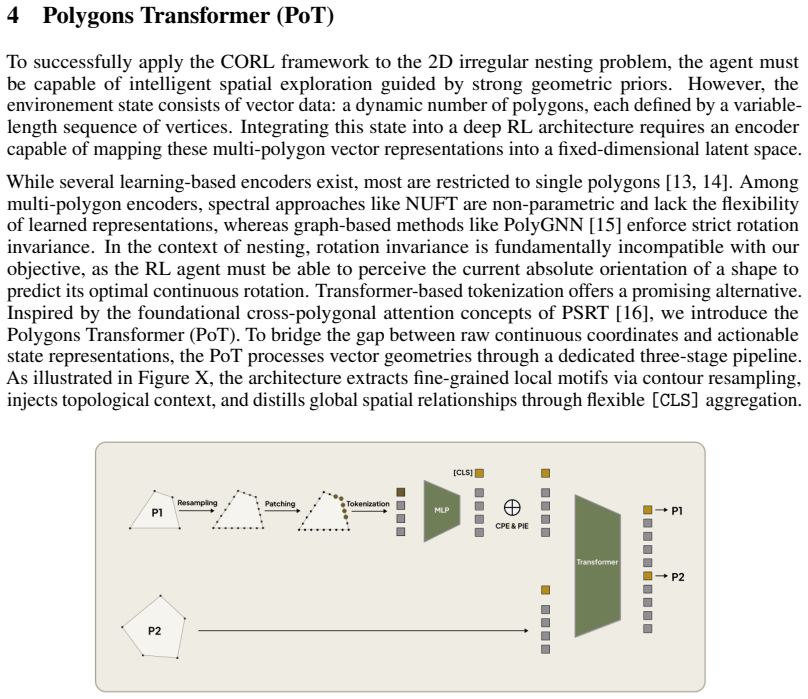
The Polygons Transformer (PoT), a neural architecture that encodes 2D continuous vector geometries while allowing cross-polygons attention to supply geometric awareness to the RL policy.
If this is right
- The agent learns to place polygons using discovered geometric priors rather than hand-designed rules.
- The released dataset and benchmark enable training and comparison of other geometry-aware methods.
- RL demonstrates capability for precise continuous spatial optimization tasks.
- Performance matching Sparrow indicates data-driven approaches can rival specialized heuristics in nesting.
Where Pith is reading between the lines
- Extending the Polygons Transformer to 3D geometries could address bin packing problems.
- Hybrid systems combining the learned policy with traditional solvers might yield further gains.
- The approach could generalize to other domains requiring spatial awareness like robotics or design automation.
- Empirical results on geographic contours suggest robustness to complex real-world shapes.
Load-bearing premise
Pairing an optimization policy with a geometry-aware neural encoder allows an agent to automatically discover rich geometric priors directly from data that strategically guide exploration in the continuous placement space.
What would settle it
If the trained agent consistently achieves lower area utilization than Sparrow on the dedicated evaluation benchmark, the claim of competitive performance would be falsified.
Figures



read the original abstract
Traditional heuristic solvers for the 2D irregular nesting problem share a fundamental limitation: they are blind to polygon geometry, relying on guided brute-force to navigate the continuous placement space with minimal geometrical guidance. In this paper, we argue that Reinforcement Learning is uniquely positioned to overcome this bottleneck. By pairing an optimization policy with a geometry-aware neural encoder, an agent can automatically discover rich geometric priors directly from data, utilizing these learned intuitions to strategically guide exploration. To realize this, we introduce the Polygons Transformer (PoT), a novel architecture that encodes 2D continuous vector geometries while allowing cross-polygons attention. We couple this novel architecture with a Combinatorial Optimization Reinforcement Learning (CORL) training framework to find optimal solutions. To support this paradigm, we release an open-source training dataset derived from complex geographic contours alongside a dedicated evaluation benchmark. Our empirical validation demonstrates that our trained agent achieves area utilization performance highly competitive with Sparrow, the state-of-the-art heuristic solver, proving that reinforcement learning can successfully discover and exploit geometric awareness for precise spatial tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes using reinforcement learning for the 2D irregular nesting problem by pairing a policy with the Polygons Transformer (PoT), a novel encoder for 2D continuous vector geometries that supports cross-polygon attention. Combined with a Combinatorial Optimization Reinforcement Learning (CORL) framework, the approach is said to let the agent discover rich geometric priors from data. The authors release a dataset derived from geographic contours and a dedicated benchmark; their central empirical claim is that the trained agent reaches area utilization performance highly competitive with the Sparrow solver, which is presented as proof that RL can successfully discover and exploit geometric awareness for precise spatial tasks.
Significance. If the performance claims are substantiated with ablations, statistical controls, and reproducible details, the work would provide evidence that learned geometry-aware representations can guide continuous placement decisions in nesting, offering a data-driven alternative to hand-crafted heuristics. The release of an open dataset and benchmark would be a concrete positive contribution for the community.
major comments (3)
- [Abstract] Abstract: the claim that competitive area utilization with Sparrow 'proves' the agent discovered and exploited geometric priors via the PoT encoder is unsupported, because no ablation isolating the geometry-aware encoder (versus a geometry-agnostic baseline) is reported, nor are training procedure, baselines, statistical significance, or error bars provided.
- [Experimental validation] Experimental validation section: without controlled comparisons or representation analysis showing that performance gains (or parity) arise specifically from learned geometric priors rather than the CORL loop or reward design, the causal interpretation of the results cannot be evaluated.
- [Method] Method section on PoT: the description of how the encoder processes continuous 2D vector geometries and implements cross-polygon attention lacks sufficient mathematical detail (input featurization, attention formulation) to assess novelty or reproducibility.
minor comments (2)
- [Introduction] Add explicit comparison to prior RL-based packing or nesting methods with citations to clarify the incremental contribution.
- [Experiments] Specify the exact metrics, number of runs, and statistical tests used for the Sparrow comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly identify areas where our claims are overstated and where additional rigor is needed. We will revise the manuscript to tone down the abstract, add required ablations and statistical details, and expand the PoT method description with mathematical formulations.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that competitive area utilization with Sparrow 'proves' the agent discovered and exploited geometric priors via the PoT encoder is unsupported, because no ablation isolating the geometry-aware encoder (versus a geometry-agnostic baseline) is reported, nor are training procedure, baselines, statistical significance, or error bars provided.
Authors: We agree the word 'proves' is too strong without ablations or statistical controls. We will revise the abstract to state that results 'suggest' the agent can discover geometric priors. We will add an ablation comparing PoT to a geometry-agnostic baseline, include full training procedures, all baselines, and report means with error bars and significance tests from multiple runs. revision: yes
-
Referee: [Experimental validation] Experimental validation section: without controlled comparisons or representation analysis showing that performance gains (or parity) arise specifically from learned geometric priors rather than the CORL loop or reward design, the causal interpretation of the results cannot be evaluated.
Authors: We accept that the current experiments do not isolate the PoT encoder's contribution from the CORL framework or reward. We will add controlled ablations (varying encoder, reward, and optimization loop) plus representation analysis such as attention visualizations to support causal claims about geometric priors. revision: yes
-
Referee: [Method] Method section on PoT: the description of how the encoder processes continuous 2D vector geometries and implements cross-polygon attention lacks sufficient mathematical detail (input featurization, attention formulation) to assess novelty or reproducibility.
Authors: We agree more detail is required. The revised method section will include explicit equations for polygon vertex featurization, the input embedding process, and the full cross-polygon attention formulation (queries, keys, values, and masking) to enable reproducibility and better demonstrate novelty. revision: yes
Circularity Check
No circularity; central claim is external empirical comparison
full rationale
The paper presents an RL framework with a novel PoT encoder and CORL training, then validates via direct performance comparison to the external Sparrow solver on area utilization. No equations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text that reduce the result to inputs by construction. The claim of discovering geometric priors is interpretive but rests on external benchmarking rather than internal self-definition or ansatz smuggling.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Irwan Bello, Hieu Pham, Quoc V Le, Mohammad Norouzi, and Samy Bengio. Neural combina- torial optimization with reinforcement learning.arXiv preprint arXiv:1611.09940, 2016
Pith/arXiv arXiv 2016
-
[2]
PolyNet: Learning diverse solution strategies for neural combinatorial optimization
André Hottung, Mridul Mahajan, and Kevin Tierney. PolyNet: Learning diverse solution strategies for neural combinatorial optimization. InInternational Conference on Learning Representations (ICLR), 2025. URLhttps://openreview.net/forum?id=TKuYWeFE6S
2025
-
[3]
Lastra-Díaz and M
Juan J. Lastra-Díaz and M. Teresa Ortuño. Mixed-integer programming models for irregular strip packing based on vertical slices and feasibility cuts.European Journal of Operational Research, 313(1):69–91, 2024
2024
-
[4]
A. Miguel Gomes and José F. Oliveira. Solving irregular strip packing problems by hybridising simulated annealing and linear programming.European Journal of Operational Research, 171 (3):811–829, 2006. doi: 10.1016/j.ejor.2004.09.008
-
[5]
Learning based 2d irregular shape packing.ACM Transactions on Graphics, 42:1–16, 2023
Zeshi Yang, Zherong Pan, Manyi Li, Kui Wu, and Xifeng Gao. Learning based 2d irregular shape packing.ACM Transactions on Graphics, 42:1–16, 2023. doi: 10.1145/3618348
-
[6]
A hybrid reinforcement learning algorithm for 2d irregular packing problems.Mathematics, 11(2):327, 2023
Jie Fang, Yunqing Rao, Xusheng Zhao, and Bing Du. A hybrid reinforcement learning algorithm for 2d irregular packing problems.Mathematics, 11(2):327, 2023
2023
-
[7]
Jeroen Gardeyn and Kenneth Sörensen. Sparrow: An open-source heuristic to reboot 2D nesting research.European Journal of Operational Research, 317(3):701–717, 2024. doi: 10.1016/j.ejor.2024.04.015
-
[8]
Donald R Jones. A fully general, exact algorithm for nesting irregular shapes.Journal of Global Optimization, 59(2):367–404, 2014. doi: 10.1007/s10898-013-0129-z
-
[9]
An approach to the two dimensional, irregular cutting stock problem
Richard C Art Jr. An approach to the two dimensional, irregular cutting stock problem. Technical report, IBM Cambridge Scientific Center, 1966
1966
-
[10]
André Kubagawa Sato, Thiago Castro Martins, Antonio Miguel Gomes, and Marcos Sales Guerra Tsuzuki. Raster penetration map applied to the irregular packing problem.Euro- pean Journal of Operational Research, 279(2):657–671, 2019. doi: 10.1016/j.ejor.2019.06.016
-
[11]
Jeroen Gardeyn. Decoupling geometry from optimization in 2d irregular cutting and packing problems: an open-source collision detection engine.arXiv, 2024. doi: 10.48550/arXiv.XXXX. XXXXX
-
[12]
Julia A Bennell and Kathryn A Dowsland. Hybridising tabu search with optimisation techniques for irregular stock cutting.Management Science, 47(8):1160–1172, 2001. doi: 10.1287/mnsc. 47.8.1160.10230
-
[13]
Contrastive graph autoencoder for shape-based polygon retrieval from large geometry datasets.Transactions on Machine Learning Research, 2023
Zexian Huang, Kourosh Khoshelham, and Martin Tomko. Contrastive graph autoencoder for shape-based polygon retrieval from large geometry datasets.Transactions on Machine Learning Research, 2023. URLhttps://openreview.net/forum?id=9fcZNAmnyh
2023
-
[14]
Gengchen Mai, Chiyu Jiang, Weiwei Sun, Rui Zhu, Yao Xuan, Ling Cai, Krzysztof Janowicz, Stefano Ermon, and Ni Lao. Towards general-purpose representation learning of polygonal geometries.GeoInformatica, 27:289–340, 2022. doi: 10.1007/s10707-022-00481-2
-
[15]
Dazhou Yu, Yuntong Hu, Yun Li, and Liang Zhao. Polygongnn: Representation learning for polygonal geometries with heterogeneous visibility graph.Proceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining, pages 4012–4022, 2024. doi: 10.1145/3637528.3671738
-
[16]
A transformer-based approach for efficient geometric feature extraction from vector shape data.Applied Sciences, 15 (5):2383, 2025
Longfei Cui, Xinyu Niu, Haizhong Qian, Xiao Wang, and Junkui Xu. A transformer-based approach for efficient geometric feature extraction from vector shape data.Applied Sciences, 15 (5):2383, 2025
2025
-
[17]
Pointer networks
Oriol Vinyals, Meire Fortunato, and Navdeep Jaitly. Pointer networks. InAdvances in Neural Information Processing Systems, volume 28, 2015. 10
2015
-
[18]
EMBER2024 - A Benchmark Dataset for Holistic Evaluation of Malware Classifiers,
Federico Berto, Chuanbo Hua, Junyoung Park, Laurin Luttmann, Yining Ma, Fanchen Bu, Jiarui Wang, Haoran Ye, Minsu Kim, Sanghyeok Choi, Nayeli Gast Zepeda, André Hottung, Jianan Zhou, Jieyi Bi, Yu Hu, Fei Liu, Hyeonah Kim, Jiwoo Son, Haeyeon Kim, Davide Angioni, Wouter Kool, Zhiguang Cao, Qingfu Zhang, Joungho Kim, and Jie Zhang. Rl4co: an extensive reinf...
-
[19]
Attention, learn to solve routing problems! InInternational Conference on Learning Representations, 2018
Wouter Kool, Herke Van Hoof, and Max Welling. Attention, learn to solve routing problems! InInternational Conference on Learning Representations, 2018
2018
-
[20]
Learning improvement heuristics for routing problems.IEEE Transactions on Neural Networks and Learning Systems, 33(9):5057–5069, 2021
Yaoxin Wu, Wen Song, Zhiguang Cao, Jie Zhang, and Andrew Lim. Learning improvement heuristics for routing problems.IEEE Transactions on Neural Networks and Learning Systems, 33(9):5057–5069, 2021
2021
-
[21]
POMO: Policy optimization with multiple optima for reinforcement learning
Yeong-Dae Kwon, Jinho Choo, Byoungjip Kim, Iljoo Yoon, Youngjune Gwon, and Seungjai Min. POMO: Policy optimization with multiple optima for reinforcement learning. InAdvances in Neural Information Processing Systems, volume 33, pages 21188–21198, 2020
2020
-
[22]
Nathan Grinsztajn, Daniel Furelos-Blanco, Shikha Surana, Clément Bonnet, and Thomas D. Barrett. Winner takes it all: Training performant rl populations for combinatorial optimization. arXiv, 2022. doi: 10.48550/arxiv.2210.03475
-
[23]
Felix Chalumeau, Shikha Surana, Clement Bonnet, Nathan Grinsztajn, Arnu Pretorius, Alexan- dre Laterre, and Thomas D. Barrett. Combinatorial optimization with policy adaptation using latent space search.arXiv, 2023. doi: 10.48550/arxiv.2311.13569
-
[24]
Learning to iteratively solve routing problems with dual-aspect collaborative transformer
Yining Ma, Jingwen Li, Zhiguang Cao, Wen Song, Le Zhang, Zhenghua Chen, and Jing Tang. Learning to iteratively solve routing problems with dual-aspect collaborative transformer. In Advances in Neural Information Processing Systems, volume 34, pages 11096–11107, 2021
2021
-
[25]
GFPack++: Improving 2D irregular packing by learning gradient field with attention.arXiv preprint, 2024
Tianyang Xue et al. GFPack++: Improving 2D irregular packing by learning gradient field with attention.arXiv preprint, 2024
2024
-
[26]
Polygons Dataset of Land Territory
OpenStreetMap contributors. Polygons Dataset of Land Territory. https://osmdata. openstreetmap.de/data/land-polygons.html, 2026. Data available under the ODbL License
2026
-
[27]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Unterthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Sylvain Gelly, Jakob Uszkoreit, and Neil Houlsby. An image is worth 16x16 words: Transformers for image recognition at scale.arXiv, 2020. doi: 10.48550/arXiv.2010.11929
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2010.11929 2020
-
[28]
Fourier features let networks learn high frequency functions in low dimensional domains
Matthew Tancik, Pratul Srinivasan, Ben Mildenhall, Sara Fridovich-Keil, Nithin Raghavan, Utkarsh Singhal, Ravi Ramamoorthi, Jonathan Barron, and Ren Ng. Fourier features let networks learn high frequency functions in low dimensional domains. InAdvances in Neural Information Processing Systems, volume 33, pages 7537–7547, 2020
2020
-
[29]
Attention is all you need.Advances in neural information processing systems, 30, 2017
Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need.Advances in neural information processing systems, 30, 2017
2017
-
[30]
Killian, Stuart Bowers, Ozan Sener, Philipp Krae- henbuehl, and Vladlen Koltun
Marco Cusumano-Towner, David Hafner, Alexander Hertzberg, Brody Huval, Aleksei Petrenko, Eugene Vinitsky, Erik Wijmans, Taylor W. Killian, Stuart Bowers, Ozan Sener, Philipp Krae- henbuehl, and Vladlen Koltun. Robust autonomy emerges from self-play. InProceedings of the 42nd International Conference on Machine Learning, volume 267, pages 11710–11737, 2025...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.