An Exposure-Time-Aligned Primary-Path Architecture for Autonomous-Driving ECUs
Pith reviewed 2026-06-27 12:55 UTC · model grok-4.3
The pith
Primary-path architecture with exposure-time alignment lets modular and end-to-end autonomous-driving paths coexist on production ECUs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
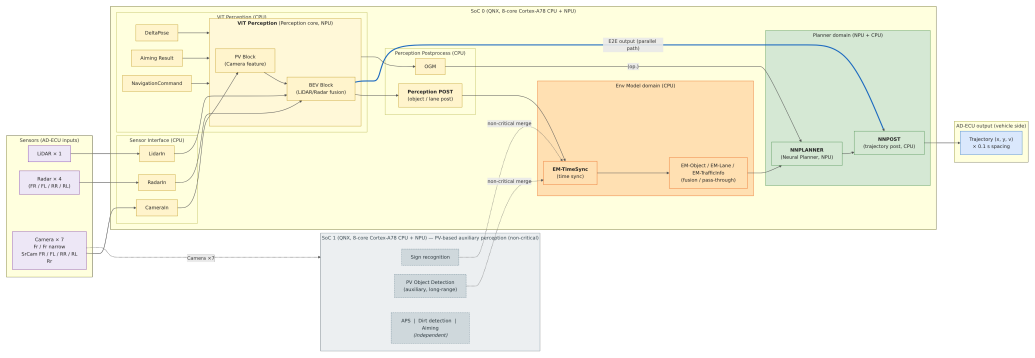
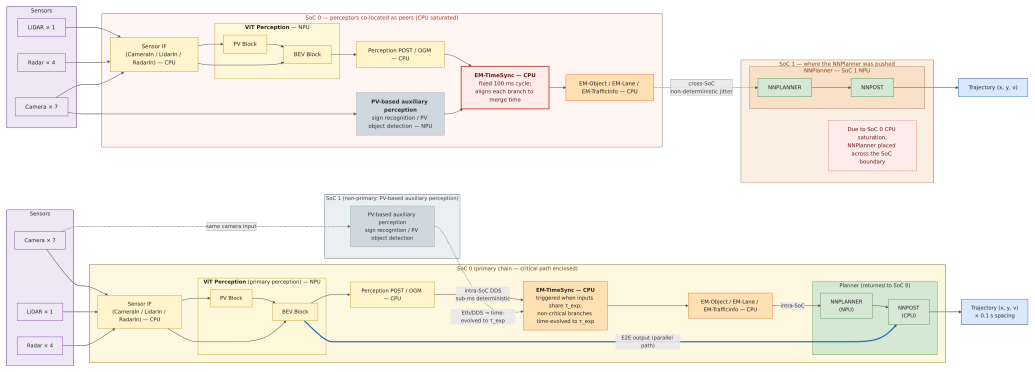
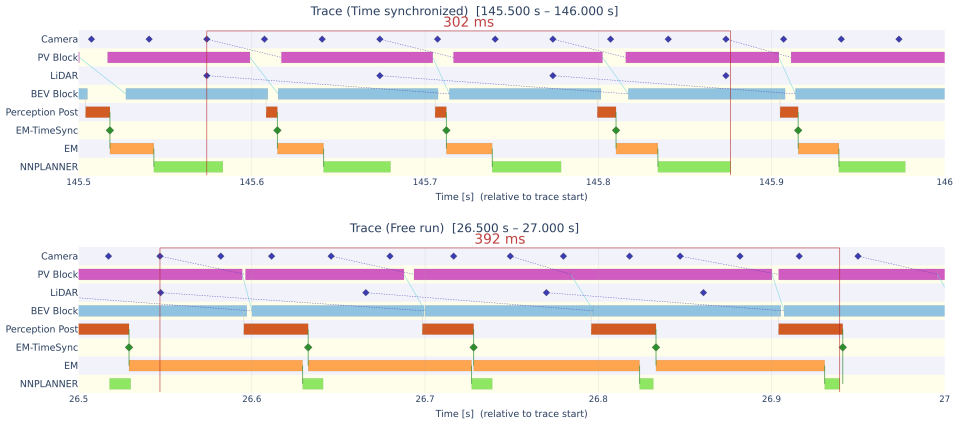
By selecting a primary perception chain on one SoC pair, propagating the primary sensor exposure time as a tag, and event-driving fusion on matched exposure times, the architecture supports a modular pipeline as primary while an end-to-end path runs as shadow inside the same exposure cycle, closing the end-to-end latency to a measured mean of 296 ms within the 350 ms budget on a production dual-SoC AD-ECU.
What carries the argument
The Exposure-Time-Aligned Primary-Path with Co-Path Coexistence, which prioritizes one perception chain, carries exposure-time tags for event-driven fusion, and permits an end-to-end output to share the identical exposure cycle.
If this is right
- The modular pipeline remains the primary path at the moment of production launch.
- The end-to-end path runs in shadow on real vehicles and can be expanded only as evaluation data accumulates.
- Both paths operate inside the same exposure-time cycle without requiring separate hardware.
- The measured mean latency of 296 ms stays inside the 350 ms design budget on existing dual-SoC ECUs.
Where Pith is reading between the lines
- If the exposure-time tag can be attached to other sensor types, the same alignment principle could extend the architecture beyond cameras.
- Staged replacement of individual modules by end-to-end components becomes possible without a full ECU redesign.
- The design may lower the barrier to testing end-to-end methods on fleets that must retain a certified modular safety case.
Load-bearing premise
That the primary modular chain will continue to deliver correct and safe outputs when the end-to-end path is added as shadow inside the same exposure cycle without creating unhandled timing or priority conflicts.
What would settle it
A production-vehicle test in which expanding the end-to-end path past shadow mode causes either measured latency above 350 ms or a detected safety violation traceable to timing mismatch between the two paths.
Figures


read the original abstract
While end-to-end (E2E) autonomous driving has become the dominant research direction, production vehicles continue to rely on modular multi-NN pipelines for a non-trivial transitional period. The subject of this paper is the design of an architecture that, during this phase, supports a modular pipeline and an E2E path side by side and embeds a path for staged migration. Transplanted to a production SoC, egalitarian late fusion is compute-inefficient and offers no natural unit for staged E2E substitution. As an alternative, we propose three design principles: (i) Primary-Path, which explicitly selects a primary perception chain and prioritizes its enclosure within a single SoC pair over the non-critical paths (ii) Exposure-Time-Aligned, which propagates the primary sensor's exposure time $\tau_{\rm exp}$ as a tag along the chain and event-drives the fusion node on matched $\tau_{\rm exp}$ rather than a fixed cycle and (iii) Co-Path Coexistence, which, building on (i) and (ii), lets an E2E output path co-run with the modular pipeline within the same $\tau_{\rm exp}$ cycle. On a Dual-SoC production AD-ECU, the implementation closes camera-shutter to planner-output latency at a mean of 296 ms within the 350 ms design budget. Under (iii), the modular pipeline is primary at production launch and the E2E path runs as shadow on real vehicles, and the E2E scope is expanded as evaluation evidence accumulates.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an architecture for autonomous-driving ECUs supporting both modular multi-NN pipelines and end-to-end (E2E) paths during the transitional period. It defines three principles: (i) Primary-Path, which selects and encloses one perception chain within a single SoC pair; (ii) Exposure-Time-Aligned, which propagates the primary sensor's exposure time au_exp as a tag for event-driven fusion; and (iii) Co-Path Coexistence, which permits an E2E output to co-run with the modular pipeline in the same au_exp cycle. The central empirical result is an implementation on a Dual-SoC production AD-ECU that achieves a mean camera-shutter to planner-output latency of 296 ms (within the 350 ms budget), with the modular path as primary and the E2E path running as shadow.
Significance. If the performance claim holds under production conditions, the work supplies a concrete, deployable design for staged migration from modular to E2E systems on real hardware. The explicit latency number obtained on a production Dual-SoC ECU is a strength, as is the focus on exposure-time alignment as a natural synchronization primitive.
major comments (2)
- [Abstract] Abstract: the central claim that the implementation closes shutter-to-planner latency at a mean of 296 ms within the 350 ms budget is presented without any description of measurement methodology, variance, trial count, or validation against edge cases or varying E2E load. This information is load-bearing for the assertion that principle (iii) preserves the budget in production.
- [Abstract] Description of Co-Path Coexistence (principle (iii)): the architecture selects a primary chain inside one SoC pair and uses exposure-time tags, yet supplies no quantitative isolation mechanism (core partitioning, memory-bandwidth reservation, or priority inheritance) and no ablation of primary-path latency as E2E compute load varies from zero to maximum. Without such data, scheduler or cache contention on the shared SoC pair could push tail latency above 350 ms even if the reported mean remains 296 ms.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and the recognition of the work's potential for staged migration on production hardware. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the implementation closes shutter-to-planner latency at a mean of 296 ms within the 350 ms budget is presented without any description of measurement methodology, variance, trial count, or validation against edge cases or varying E2E load. This information is load-bearing for the assertion that principle (iii) preserves the budget in production.
Authors: We agree the abstract would be strengthened by including a brief description of the measurement approach. The full manuscript details the methodology, trial counts, and validation in the Experiments section. We will revise the abstract to concisely note the methodology (timestamped ECU logs), trial count, and variance while preserving the central claim. revision: yes
-
Referee: [Abstract] Description of Co-Path Coexistence (principle (iii)): the architecture selects a primary chain inside one SoC pair and uses exposure-time tags, yet supplies no quantitative isolation mechanism (core partitioning, memory-bandwidth reservation, or priority inheritance) and no ablation of primary-path latency as E2E compute load varies from zero to maximum. Without such data, scheduler or cache contention on the shared SoC pair could push tail latency above 350 ms even if the reported mean remains 296 ms.
Authors: The Primary-Path principle provides isolation by enclosing the critical chain in a dedicated SoC pair, leveraging the production hardware's core affinity and memory partitioning (detailed in Section 4). We acknowledge the absence of an explicit ablation on E2E load variation and will add such results in the revision to quantify primary-path latency stability under increasing E2E compute. revision: yes
Circularity Check
No circularity; latency claim is direct implementation measurement
full rationale
The paper defines three design principles (Primary-Path, Exposure-Time-Aligned, Co-Path Coexistence) and reports an empirical result: mean shutter-to-planner latency of 296 ms on a Dual-SoC production AD-ECU. No equations, fitted parameters, or self-citations appear in the provided text. The central claim is a measured performance outcome under the stated architecture, not a derived prediction that reduces to its own inputs by construction. The derivation chain is therefore self-contained as an engineering implementation report.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Production vehicles will continue to rely on modular multi-NN pipelines for a non-trivial transitional period.
- domain assumption Egalitarian late fusion is compute-inefficient and offers no natural unit for staged E2E substitution.
Reference graph
Works this paper leans on
-
[1]
Planning- oriented Autonomous Driving
Yihan Hu, Jiazhi Yang, Li Chen, Keyu Li, Chonghao Sima, Xizhou Zhu, Siqi Chai, Senyao Du, Tianwei Lin, Wenhai Wang, Lewei Lu, Xiaosong Jia, Qiang Liu, Jifeng Dai, Yu Qiao, and Hongyang Li. “Planning- oriented Autonomous Driving”. In:IEEE/CVF Con- Fig. 6: Co-path coexistence on the production AD-ECU during real-vehicle operation. The 3D BEV view shows the ...
2023
-
[2]
IEEE, 2023, pp. 17853–17862.DOI: 10 . 1109 / CVPR52729.2023.01712.URL: https://doi.org/10.1109/ CVPR52729.2023.01712
-
[3]
In: 2023 IEEE/CVF International Conference on Computer Vision (ICCV)
Bo Jiang, Shaoyu Chen, Qing Xu, Bencheng Liao, Jiajie Chen, Helong Zhou, Qian Zhang, Wenyu Liu, Chang Huang, and Xinggang Wang. “V AD: Vectorized Scene Representation for Efficient Autonomous Driving”. In: IEEE/CVF International Conference on Computer Vi- sion, ICCV 2023, Paris, France, October 1-6, 2023. IEEE, 2023, pp. 8306–8316.DOI: 10.1109/ICCV51070. ...
-
[4]
GenAD: Generative End- to-End Autonomous Driving
Wenzhao Zheng, Ruiqi Song, Xianda Guo, Chenming Zhang, and Long Chen. “GenAD: Generative End- to-End Autonomous Driving”. In:Computer Vision - ECCV 2024 - 18th European Conference, Milan, Italy, September 29-October 4, 2024, Proceedings, Part LXV. Ed. by Ales Leonardis, Elisa Ricci, Stefan Roth, Olga Russakovsky, Torsten Sattler, and Gül Varol. Lecture No...
-
[5]
Fixed Stress Splitting Approach for Contact Problems in a Porous Medium
Chonghao Sima, Katrin Renz, Kashyap Chitta, Li Chen, Hanxue Zhang, Chengen Xie, Jens Beißwenger, Ping Luo, Andreas Geiger, and Hongyang Li. “DriveLM: Driving with Graph Visual Question Answering”. In: Computer Vision - ECCV 2024 - 18th European Con- ference, Milan, Italy, September 29-October 4, 2024, Proceedings, Part LII. Ed. by Ales Leonardis, Elisa Ri...
-
[6]
International Standard
International Organization for Standardization.ISO 26262: Road vehicles — Functional safety. International Standard. 2018
2018
-
[7]
A Survey of Autonomous Driv- ing: Common Practices and Emerging Technologies
Ekim Yurtsever, Jacob Lambert, Alexander Carballo, and Kazuya Takeda. “A Survey of Autonomous Driv- ing: Common Practices and Emerging Technologies”. In:IEEE Access8 (2020), pp. 58443–58469.DOI: 10. 1109/ACCESS.2020.2983149.URL: https://doi.org/10. 1109/ACCESS.2020.2983149
-
[8]
Haoyang Fan, Fan Zhu, Changchun Liu, Liangliang Zhang, Li Zhuang, Dong Li, Weicheng Zhu, Jiangtao Hu, Hongye Li, and Qi Kong.Baidu Apollo EM Motion Planner. 2018. arXiv: 1807 . 08048[cs.RO].URL: https://arxiv.org/abs/1807.08048
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[9]
Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems
Shinpei Kato, Shota Tokunaga, Yuya Maruyama, Seiya Maeda, Manato Hirabayashi, Yuki Kitsukawa, Abraham Monrroy, Tomohito Ando, Yusuke Fujii, and Takuya Azumi. “Autoware on Board: Enabling Autonomous Vehicles with Embedded Systems”. In:2018 ACM/IEEE 9th International Conference on Cyber-Physical Sys- tems (ICCPS). 2018, pp. 287–296.DOI: 10 . 1109 / ICCPS.2018.00035
-
[10]
DriveVLM: The Con- vergence of Autonomous Driving and Large Vision- Language Models
Xiaoyu Tian, Junru Gu, Bailin Li, Yicheng Liu, Yang Wang, Zhiyong Zhao, Kun Zhan, Peng Jia, Xian- peng Lang, and Hang Zhao. “DriveVLM: The Con- vergence of Autonomous Driving and Large Vision- Language Models”. In:Conference on Robot Learning, 6-9 November 2024, Munich, Germany. Ed. by Pulkit Agrawal, Oliver Kroemer, and Wolfram Burgard. Pro- ceedings of ...
2024
-
[11]
Bo Jiang, Shaoyu Chen, Bencheng Liao, Xingyu Zhang, Wei Yin, Qian Zhang, Chang Huang, Wenyu Liu, and Xinggang Wang.Senna: Bridging Large Vision- Language Models and End-to-End Autonomous Driv- ing. 2024. arXiv: 2410.22313[cs.CV].URL: https: //arxiv.org/abs/2410.22313
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[12]
nuScenes: A Multimodal Dataset for Autonomous Driving
Holger Caesar, Varun Bankiti, Alex H. Lang, Sourabh V ora, Venice Erin Liong, Qiang Xu, Anush Krish- nan, Yu Pan, Giancarlo Baldan, and Oscar Beijbom. “nuScenes: A Multimodal Dataset for Autonomous Driving”. In:2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2020, Seattle, WA, USA, June 13-19, 2020. Computer Vision Founda- tion /...
2020
-
[13]
Jiang-Tian Zhai, Ze Feng, Jinhao Du, Yongqiang Mao, Jiang-Jiang Liu, Zichang Tan, Yifu Zhang, Xiaoqing Ye, and Jingdong Wang.Rethinking the Open-Loop Evalu- ation of End-to-End Autonomous Driving in nuScenes
-
[14]
Rethinking the Open-Loop Evaluation of End-to-End Autonomous Driving in nuScenes
arXiv: 2305.10430[cs.CV].URL: https://arxiv. org/abs/2305.10430
work page internal anchor Pith review Pith/arXiv arXiv
-
[15]
SafetyNet: Safe Planning for Real-World Self- Driving Vehicles Using Machine-Learned Policies
Matt Vitelli, Yan Chang, Yawei Ye, Ana Ferreira, Ma- ciej Wolczyk, Blazej Osinski, Moritz Niendorf, Hugo Grimmett, Qiangui Huang, Ashesh Jain, and Peter On- druska. “SafetyNet: Safe Planning for Real-World Self- Driving Vehicles Using Machine-Learned Policies”. In: 2022 International Conference on Robotics and Au- tomation, ICRA 2022, Philadelphia, PA, US...
-
[16]
Safety-Enhanced Autonomous Driving Using Interpretable Sensor Fusion Transformer
Hao Shao, Letian Wang, Ruobing Chen, Hongsheng Li, and Yu Liu. “Safety-Enhanced Autonomous Driving Using Interpretable Sensor Fusion Transformer”. In: Conference on Robot Learning, CoRL 2022, 14-18 December 2022, Auckland, New Zealand. Ed. by Karen Liu, Dana Kulic, and Jeffrey Ichnowski. Proceedings of Machine Learning Research. PMLR, 2022, pp. 726– 737.U...
2022
-
[17]
Li Chen, Penghao Wu, Kashyap Chitta, Bernhard Jaeger, Andreas Geiger, and Hongyang Li. “End-to-End Autonomous Driving: Challenges and Frontiers”. In: IEEE Trans. Pattern Anal. Mach. Intell.46.12 (2024), pp. 10164–10183.DOI: 10.1109/TPAMI.2024.3435937. URL: https://doi.org/10.1109/TPAMI.2024.3435937
-
[18]
A Sur- vey of End-to-End Driving: Architectures and Training Methods
Ardi Tampuu, Tambet Matiisen, Maksym Semikin, Dmytro Fishman, and Naveed Muhammad. “A Sur- vey of End-to-End Driving: Architectures and Training Methods”. In:IEEE Trans. Neural Networks Learn. Syst.33.4 (2022), pp. 1364–1384.DOI: 10 . 1109 / TNNLS.2020.3043505.URL: https://doi.org/10.1109/ TNNLS.2020.3043505
-
[19]
Latency Measurement for Autonomous Driving Software Using Data Flow Extraction
Tobias Betz, Maximilian Schmeller, Harun Teper, and Johannes Betz. “How Fast is My Software? Latency Evaluation for a ROS 2 Autonomous Driving Software”. In:IEEE Intelligent Vehicles Symposium, IV 2023, An- chorage, AK, USA, June 4-7, 2023. IEEE, 2023, pp. 1–6. DOI: 10 . 1109 / IV55152 . 2023 . 10186585.URL: https : //doi.org/10.1109/IV55152.2023.10186585
-
[20]
Latency Measurement for Autonomous Driving Software Using Data Flow Extraction
Tobias Betz, Maximilian Schmeller, Andreas Korb, and Johannes Betz. “Latency Measurement for Autonomous Driving Software Using Data Flow Extraction”. In: IEEE Intelligent Vehicles Symposium, IV 2023, Anchor- age, AK, USA, June 4-7, 2023. IEEE, 2023, pp. 1–8. DOI: 10 . 1109 / IV55152 . 2023 . 10186686.URL: https : //doi.org/10.1109/IV55152.2023.10186686
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.