DarkVGGT: Seeing Through Darkness Using Thermal Geometry without Daylight Tax
Pith reviewed 2026-06-27 13:19 UTC · model grok-4.3
The pith
DarkVGGT recovers accurate 3D scene geometry from RGB-thermal streams in darkness by separating reliable thermal shape cues from reflections.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
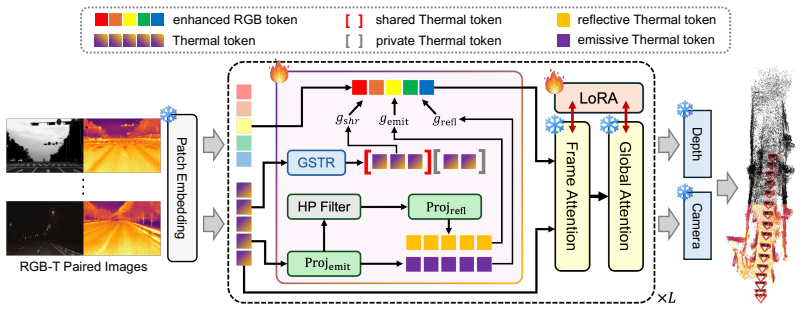
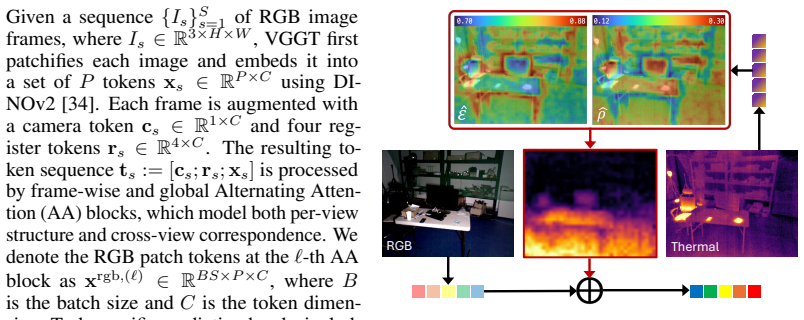
DarkVGGT introduces physics-inspired thermal factorization that extracts emissive-dominant, geometry-consistent thermal cues while isolating sparse reflective residuals, together with geometry-shared thermal routing that isolates modality-invariant geometric structures from thermal-specific patterns and selectively injects reliability-aware structural guidance into the RGB stream, enabling accurate thermal-informed geometry estimation under degraded RGB conditions while largely preserving performance in well-lit environments.
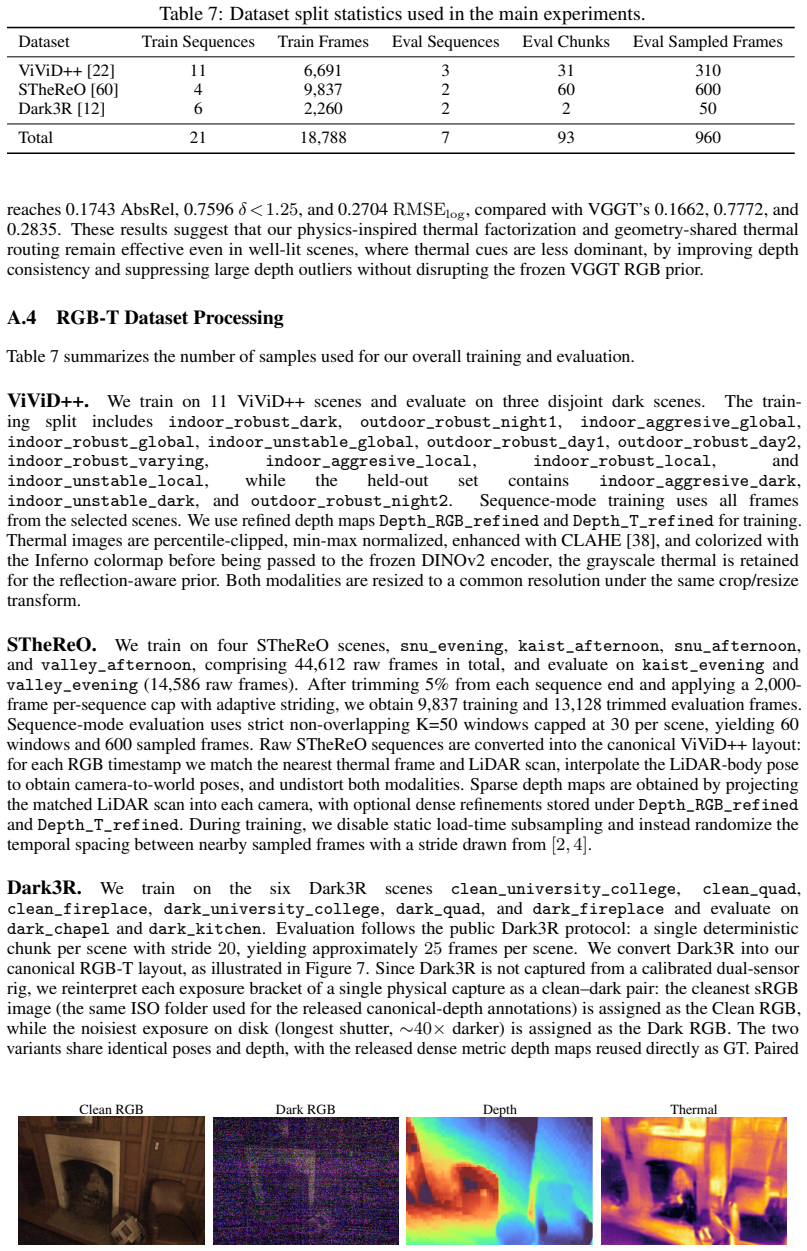
What carries the argument
Physics-inspired thermal factorization paired with geometry-shared thermal routing, which together supply modality-invariant geometric guidance from thermal data to an RGB feed-forward reconstruction pipeline.
If this is right
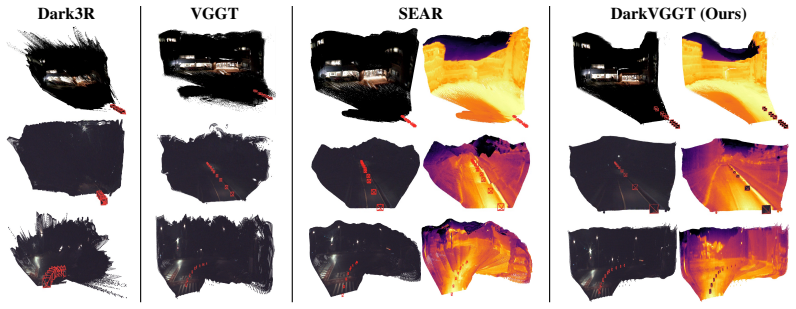
- Consistent gains in depth accuracy on low-visibility RGB-T benchmarks
- Improved camera-pose estimates under the same degraded conditions
- Performance in well-lit scenes remains close to the RGB-only baseline
- The approach works inside existing feed-forward geometry pipelines without requiring changes to the core network architecture
Where Pith is reading between the lines
- The same factorization idea could be tested on other modality pairs where one channel remains stable when the other degrades, such as radar or event-camera fusion.
- If the routing step proves lightweight, the method might support real-time night-time mapping on mobile robots without extra daylight hardware.
- The separation of emissive versus reflective thermal content might also reduce errors in applications like thermal-based material classification that currently treat the whole image as geometry.
- The framework leaves open whether the same cues remain useful when thermal reflections become dense rather than sparse, a case the current benchmarks do not stress.
Load-bearing premise
Thermal images supply emissive signals that remain geometrically consistent with the scene and can be cleanly separated from reflective parts that would otherwise create ambiguity.
What would settle it
A controlled experiment on low-visibility RGB-T data in which depth and camera-pose accuracy show no gain or a clear drop when the thermal factorization and routing modules are removed compared with a standard RGB-only feed-forward baseline.
Figures



read the original abstract
Recent feed-forward 3D reconstruction methods have demonstrated strong performance and flexibility in efficient end-to-end scene geometry estimation from image streams. However, their reliance on visible-light appearance makes them vulnerable in dark and low-visibility environments, where RGB cues are severely degraded and geometric evidence becomes ambiguous. To address this challenge, we propose DarkVGGT, an RGB-T feed-forward geometry framework that uses physics-aware thermal modeling for robust 3D estimation in low-light scenes. DarkVGGT introduces two complementary modules. First, physics-inspired thermal factorization extracts emissive-dominant, geometry-consistent thermal cues while isolating sparse reflective residuals that may introduce geometric ambiguity. Second, geometry-shared thermal routing isolates modality-invariant geometric structures from thermal-specific patterns, selectively injecting reliability-aware structural guidance into the RGB stream. Together, these components enable accurate thermal-informed geometry estimation under degraded RGB conditions while largely preserving performance in well-lit environments. Experiments on low-visibility RGB-T benchmarks demonstrate consistent improvements in both depth and camera pose estimation over existing feed-forward geometry baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes DarkVGGT, an RGB-T feed-forward 3D geometry estimation framework for low-light scenes. It introduces two modules: (1) physics-inspired thermal factorization to extract emissive-dominant, geometry-consistent thermal cues while isolating reflective residuals, and (2) geometry-shared thermal routing to isolate modality-invariant structures and inject reliability-aware guidance into the RGB stream. The central claim is that these components enable accurate thermal-informed geometry estimation under degraded RGB conditions while largely preserving performance in well-lit environments, supported by experiments showing consistent improvements in depth and camera pose estimation over feed-forward baselines on low-visibility RGB-T benchmarks.
Significance. If the claims hold with rigorous validation, the work would address a practical limitation of current feed-forward 3D reconstruction methods by incorporating thermal data in a physics-aware manner without incurring a performance penalty in normal lighting. The emphasis on modality-invariant geometric structures and selective guidance injection could inform future multi-modal vision systems for robotics and autonomous navigation in challenging conditions.
major comments (1)
- [Abstract] Abstract: The claim that 'experiments on low-visibility RGB-T benchmarks demonstrate consistent improvements in both depth and camera pose estimation over existing feed-forward geometry baselines' is presented without any quantitative results, error bars, dataset specifications, baseline names, ablation studies, or implementation details. This absence renders the central claim unverifiable and load-bearing for the paper's contribution.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive comment on the abstract. We address the point below and outline the planned revision.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that 'experiments on low-visibility RGB-T benchmarks demonstrate consistent improvements in both depth and camera pose estimation over existing feed-forward geometry baselines' is presented without any quantitative results, error bars, dataset specifications, baseline names, ablation studies, or implementation details. This absence renders the central claim unverifiable and load-bearing for the paper's contribution.
Authors: We agree that the abstract presents the central claim at a high level without the specific quantitative details, dataset names, baselines, or error metrics that would allow immediate verification. Although the full manuscript contains these elements in the Experiments section (including benchmark names, baseline comparisons, and ablation results), the referee is correct that the abstract itself does not make the claim self-contained. To resolve this, we will revise the abstract in the next version to include concise quantitative highlights (e.g., average depth error reductions and pose accuracy gains on the cited low-visibility RGB-T benchmarks relative to the named feed-forward baselines), while preserving its brevity. This change directly addresses the concern without altering the manuscript's technical content. revision: yes
Circularity Check
No significant circularity identified
full rationale
The provided abstract and description introduce two modules (physics-inspired thermal factorization and geometry-shared thermal routing) at a high level but contain no equations, derivations, fitting procedures, predictions, or self-citations that could form a load-bearing chain. No step reduces by construction to its inputs, as there are no mathematical claims or parameter fits presented. The reader's assessment of 2.0 aligns with the absence of any derivation content. The central assertions are descriptive proposals supported by (unshown) experiments rather than self-referential results.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Thermal images can be factored into emissive-dominant geometry-consistent cues and sparse reflective residuals using physics-inspired modeling.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.