Sparsity-Driven Source Localization in Tomographic Sensing Applications
Pith reviewed 2026-06-27 09:13 UTC · model grok-4.3
The pith
Sparsity-promoting regularization identifies, localizes, and quantifies contaminant release sources from tomographic standoff measurements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Modeling transport by the advection-diffusion equation and solving the inverse source problem with sparsity-promoting regularization together with an efficient optimizer recovers the locations and release rates of contaminant sources from paired standoff tomographic measurements; the measurements are incorporated via a level-set representation of a concentration threshold that remains independent of the computational mesh.
What carries the argument
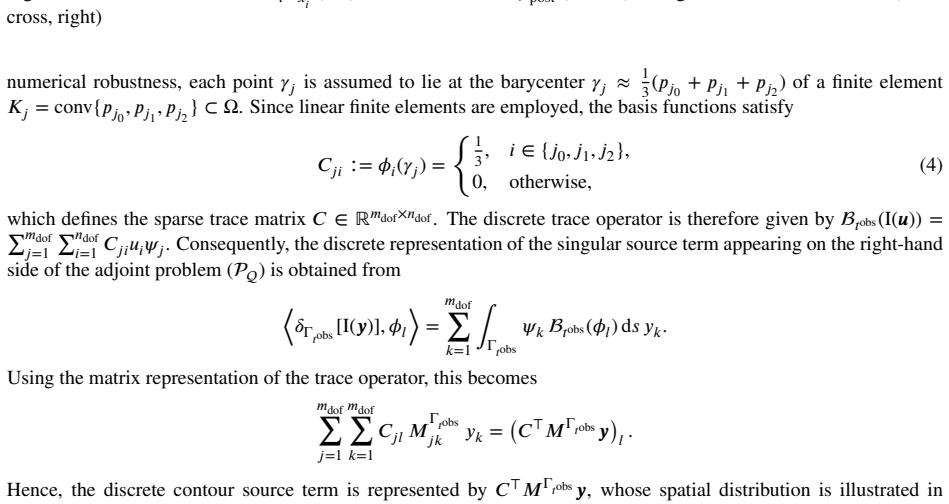
Sparsity-promoting regularization term added to the objective of the discrete inverse source problem, combined with a level-set description that encodes threshold concentration surfaces for mesh-independent incorporation of tomographic data.
If this is right
- Source number, positions, and strengths can be recovered without any prior assumption on the number of active releases.
- Once sources are identified, the same transport model yields forward predictions of plume evolution from the standoff data.
- The level-set measurement representation allows the optimization to proceed on a fixed mesh even when sensor geometry changes.
- Quantification of release rates becomes available alongside localization, supporting material-balance estimates.
Where Pith is reading between the lines
- The same sparsity-plus-level-set construction could be tested on other sparse-source inverse problems that use remote sensing, such as volcanic emission tracking or industrial leak detection.
- Coupling the optimizer to streaming sensor feeds would turn the static reconstruction into a dynamic filter that updates source estimates in real time.
- A controlled release experiment with independently measured wind and diffusion parameters would directly test whether the recovered sources converge to ground truth as measurement density increases.
Load-bearing premise
Contaminant transport is adequately described by an advection-diffusion equation whose parameters are known well enough for the regularized inverse problem to remain solvable.
What would settle it
Generate synthetic tomographic data from a known sparse set of point sources under the advection-diffusion model with fixed parameters, then run the algorithm and check whether the recovered source locations and strengths match the input configuration within the tolerance implied by the regularization.
Figures




read the original abstract
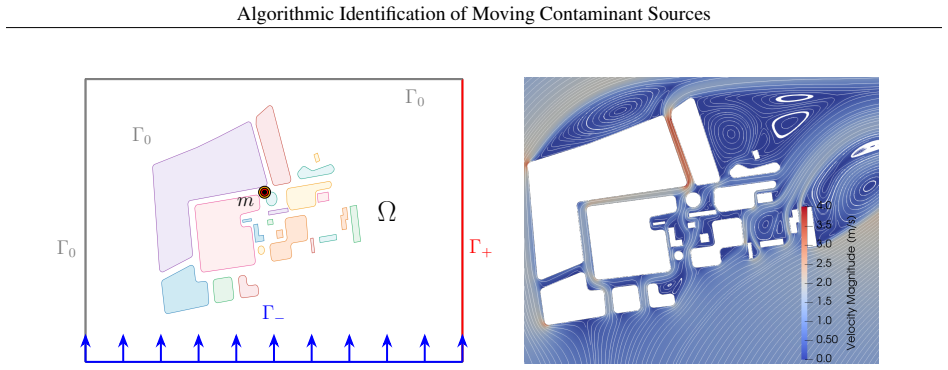
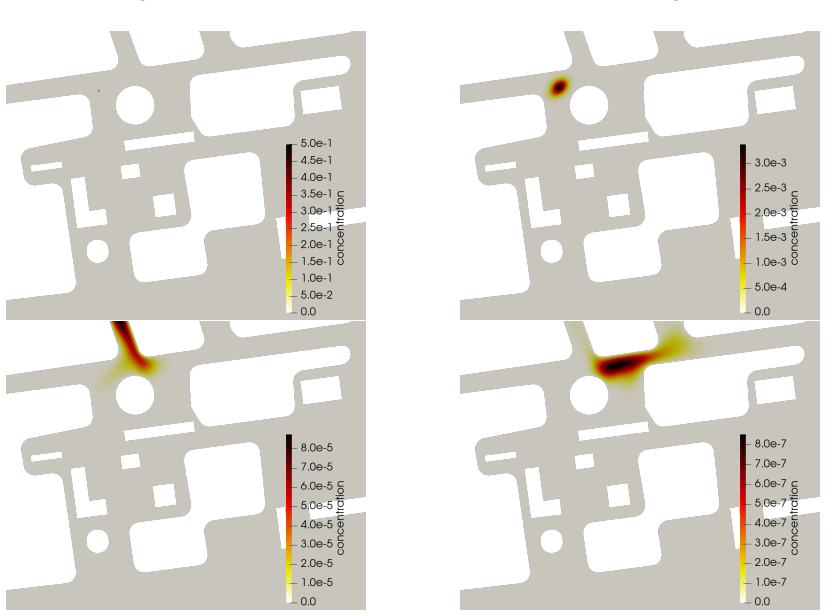
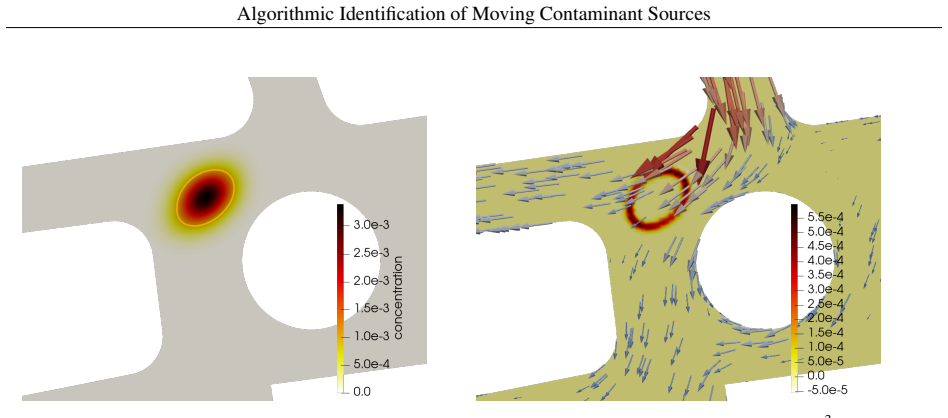
Hyperspectral standoff detection systems such as Focal Plane Array (FPA) Fourier Transform Infrared (FTIR) spectrometers provide high spatial resolution in detecting airborne chemical contaminants that are invisible to the human eye but potentially hazardous. When two such systems are operated simultaneously with a suitable opening angle, they enable tomographic reconstruction of contaminant plumes with improved spatial and temporal accuracy. This work presents a mathematical model of these measurement capabilities and an algorithm to identify, localize, and quantify contaminant release sources. The objective is to develop a a tool that reconstructs release locations and predict the future plume evolution from standoff measurement data, thereby supporting early warning and situational awareness in hazardous material release scenarios. The transport of contaminants is modeled by an advection-diffusion equation, and the corresponding inverse problem for source identification is formulated accordingly. Owing to the severe ill-posedness and underdetermination of the problem, a sparsity-promoting regularization approach is employed together with a high-performance optimization algorithm. To incorporate the tomographic measurement data into the discrete formulation, a level-set description of a threshold concentration is used, allowing the measurements to be represented independently of the computational mesh and avoiding costly remeshing procedures.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript formulates an inverse source problem for localizing and quantifying contaminant releases from tomographic standoff measurements obtained with two hyperspectral FTIR systems. Transport is modeled by the advection-diffusion equation; the severely underdetermined inverse problem is regularized by a sparsity-promoting term and solved with a high-performance optimizer. Tomographic data are incorporated via a level-set representation of a concentration threshold, which decouples the measurement operator from the computational mesh.
Significance. If the numerical results hold under realistic conditions, the combination of sparsity regularization and the level-set measurement operator would constitute a practical contribution to standoff detection applications. The level-set formulation is a clear strength, as it avoids remeshing while allowing direct use of threshold-based tomographic data. No machine-checked proofs or parameter-free derivations are present; the work is algorithmic and relies on the standard assumption that the forward operator is known accurately.
major comments (2)
- [§2] §2 (Mathematical Model) and the paragraph on the inverse problem: the central claim that sparsity regularization renders the inverse source problem solvable presupposes that the advection-diffusion parameters (velocity field, diffusivity) are known to high accuracy. No sensitivity analysis, joint parameter estimation, or Monte-Carlo study against 5–10 % perturbations in wind velocity is reported, yet such perturbations are common in field data and would alter the Green's function, potentially invalidating the recovery guarantees.
- [Numerical experiments] Numerical experiments section (presumably §4–5): the validation results are presented only for the nominal forward operator; without the missing robustness tests, it is impossible to assess whether the reported localization accuracy survives realistic model error, which is load-bearing for the early-warning application claimed in the abstract.
minor comments (2)
- [Abstract] Abstract, line 8: 'develop a a tool' contains a duplicated article.
- [§3] Notation for the level-set function and the measurement operator should be introduced once and used consistently; several symbols appear without prior definition in the discrete formulation.
Simulated Author's Rebuttal
We thank the referee for the detailed review and constructive feedback on our manuscript. We address the major comments below and commit to revisions that strengthen the robustness analysis.
read point-by-point responses
-
Referee: [§2] §2 (Mathematical Model) and the paragraph on the inverse problem: the central claim that sparsity regularization renders the inverse source problem solvable presupposes that the advection-diffusion parameters (velocity field, diffusivity) are known to high accuracy. No sensitivity analysis, joint parameter estimation, or Monte-Carlo study against 5–10 % perturbations in wind velocity is reported, yet such perturbations are common in field data and would alter the Green's function, potentially invalidating the recovery guarantees.
Authors: The formulation does assume known transport parameters, which is a standard assumption in many inverse source problems focused on source identification rather than parameter estimation. The sparsity regularization addresses the ill-posedness under this model. We agree that sensitivity to perturbations is relevant for the application. In the revised version, we will add a sensitivity study with Monte-Carlo simulations under 5-10% perturbations in wind velocity to assess the impact on recovery. revision: yes
-
Referee: [Numerical experiments] Numerical experiments section (presumably §4–5): the validation results are presented only for the nominal forward operator; without the missing robustness tests, it is impossible to assess whether the reported localization accuracy survives realistic model error, which is load-bearing for the early-warning application claimed in the abstract.
Authors: The presented experiments validate the method with the exact forward operator to demonstrate the effectiveness of the sparsity and level-set approaches. To address concerns about model mismatch, the revised manuscript will include additional numerical tests incorporating perturbations in the advection-diffusion parameters and report the resulting localization accuracy. revision: yes
Circularity Check
No circularity; standard sparsity regularization applied to inverse problem
full rationale
The paper models contaminant transport with the advection-diffusion equation, formulates the inverse source problem from tomographic standoff data using a level-set measurement operator, and applies sparsity-promoting regularization solved by a high-performance optimizer. No equations or steps in the provided text reduce by construction to fitted parameters, self-definitions, or self-citation chains; the regularization is described as a standard tool for ill-posed inverse problems. The derivation remains independent of the paper's own outputs and relies on external mathematical and numerical methods.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Dissemination monitoring by LWIR hyperspectral imaging
F. Wilsenack et al. “Dissemination monitoring by LWIR hyperspectral imaging”. In:Chemical, Biological, Radiological, Nuclear, and Explosives (CBRNE) Sensing XX. Ed. by Jason A. Guicheteau and Chris R. Howle. International Society for Optics and Photonics. SPIE, 2019, p. 1101007.DOI:10.1117/12.2518834.URL: https://doi.org/10.1117/12.2518834
-
[2]
Frank Wilsenack et al. “Combining standoff tomography with point detection: a game changer for the identifi- cation of airborne toxic chemicals”. In:Proc. SPIE. SPIE, 2024.DOI:10.1117/12.3013427
-
[3]
Marco Mattuschka et al. “Sparse source identification in transient advection-diffusion problems with a primal-dual-active-point strategy”. In:Computer Methods in Applied Mechanics and Engineering454 (2026), p. 118854.ISSN: 0045-7825.DOI:10.1016/j.cma.2026.118854
-
[4]
Current status of research on chemical warfare agent detection technology
Zhehao Zhang et al. “Current status of research on chemical warfare agent detection technology”. In:TrAC Trends in Analytical Chemistry193 (2025), p. 118474.ISSN: 0165-9936.DOI:https://doi.org/10.1016 /j.trac.2025.118474.URL:https://www.sciencedirect.com/science/article/pii/S016599362 5003425
arXiv 2025
-
[5]
A Review of Chemical Warfare Agent (CW A) Detector Technologies and Commercial-Off- The-Shelf Items
R. Sferopoulos. “A Review of Chemical Warfare Agent (CW A) Detector Technologies and Commercial-Off- The-Shelf Items.” In:Science and Technology Organisation Technical Report(2009).URL:https://www.sc iencedirect.com/science/article/pii/S0165993625003425
2009
-
[6]
Roland Harig and Gerhard Matz. “Toxic cloud imaging by infrared spectrometry: A scanning FTIR system for identification and visualization”. In:Field Analytical Chemistry & Technology5.1-2 (2001), pp. 75–90.DOI: https://doi.org/10.1002/fact.1008. eprint:https://onlinelibrary.wiley.com/doi/pdf/10.10 02/fact.1008.URL:https://onlinelibrary.wiley.com/doi/abs/1...
-
[7]
Maria Allers et al. “Real-Time Remote Detection of Airborne Chemical Hazards—An Unmanned Aerial Vehi- cle (UA V) Carrying an Ion Mobility Spectrometer”. In:IEEE Sensors Journal23.15 (2023), pp. 16562–16570. DOI:10.1109/JSEN.2023.3287448
-
[8]
Roland Harig et al. “Remote detection of gases and liquids by imaging Fourier transform spectrometry using a focal plane array detector: first results”. In:Chemical and Biological Sensors for Industrial and Environmental Monitoring II. Ed. by Steven D. Christesen et al. International Society for Optics and Photonics. SPIE, 2006, p. 637816.DOI:10.1117/12.692922
-
[9]
Frank Wilsenack et al. “Detection and 3D characterization of short-time chemical exposures with a dual setup of IR focal plane arrays”. In:Chemical, Biological, Radiological, Nuclear, and Explosives (CBRNE) Sensing XXIV. Ed. by Jason A. Guicheteau and Christopher R. Howle. International Society for Optics and Photonics. SPIE, 2023, p. 1254102.DOI:10.1117/...
work page doi:10.1117/12.2663155.url:https://doi.org/10.1117/12.2663155 2023
-
[10]
Roseane A. S. Albani et al. “Uncertainty quantification and atmospheric source estimation with a discrepancy- based and a state-dependent adaptative MCMC”. In:Environmental Pollution290 (2021), p. 118039.DOI: 10.1016/j.envpol.2021.118039
-
[11]
Inverse problems: A Bayesian perspective
A. M. Stuart. “Inverse problems: A Bayesian perspective”. In:Acta Numerica19 (2010), pp. 451–559.DOI: 10.1017/S0962492910000061
-
[12]
Jonas Nitzler et al. “A generalized probabilistic learning approach for multi-fidelity uncertainty quantification in complex physical simulations”. In:Computer Methods in Applied Mechanics and Engineering400 (2022), p. 115600.ISSN: 0045-7825.DOI:10.1016/j.cma.2022.115600. 9 Algorithmic Identification of Moving Contaminant Sources
-
[13]
Identifying sources of groundwater pollution: An optimization approach
Steven M. Gorelick, Barbara Evans, and Irwin Remson. “Identifying sources of groundwater pollution: An optimization approach”. In:Water Resources Research19.3 (1983), pp. 779–790.DOI:10.1029/WR019i003p 00779
-
[14]
Heat source identification based on𝑙 1 constrained minimiza- tion
Richard Tsai, Stanley Osher, and Yingying Li. “Heat source identification based on𝑙 1 constrained minimiza- tion”. In:Inverse Problems and Imaging8.1 (2014), pp. 199–221.DOI:10.3934/ipi.2014.8.199
-
[15]
Umberto Villa, Noemi Petra, and Omar Ghattas. “hIPPYlib”. In:ACM Transactions on Mathematical Software 47.2 (2021), pp. 1–34.DOI:10.1145/3428447
-
[16]
Domain Knowledge Assisted Gas Tomography
Thomas Wiedemann et al. “Domain Knowledge Assisted Gas Tomography”. In:2024 IEEE International Sym- posium on Olfaction and Electronic Nose (ISOEN). IEEE, 2024, pp. 1–3.ISBN: 979-8-3503-4865-1.DOI:10.1 109/ISOEN61239.2024.10556226
arXiv 2024
-
[17]
https://math.nyu.edu/~stadler/papers/PetraStadler11.pdf
Noei Petra and Georg Stadler.Model Variational Inverse Problems Governed by Partial Differential Equations. https://math.nyu.edu/~stadler/papers/PetraStadler11.pdf. The University of Texas, 2011
2011
-
[18]
Keyi Wu, Peng Chen, and Omar Ghattas. “An Offline-Online Decomposition Method for Efficient Linear Bayesian Goal-Oriented Optimal Experimental Design: Application to Optimal Sensor Placement”. In:SIAM Journal on Scientific Computing45.1 (2023), B57–B77.ISSN: 1064-8275.DOI:10.1137/21M1466542
-
[19]
SIAM Journal on Scientific Computing , year =
Alen Alexanderian et al. “A-Optimal Design of Experiments for Infinite-Dimensional Bayesian Linear Inverse Problems with Regularized𝓁 0-Sparsification”. In:SIAM Journal on Scientific Computing36.5 (2014), A2122– A2148.ISSN: 1064-8275.DOI:10.1137/130933381
-
[20]
Efficient D-Optimal Design of Experiments for Infinite- Dimensional Bayesian Linear Inverse Problems
Alen Alexanderian and Arvind K. Saibaba. “Efficient D-Optimal Design of Experiments for Infinite- Dimensional Bayesian Linear Inverse Problems”. In:SIAM Journal on Scientific Computing40.5 (2018), A2956–A2985.ISSN: 1064-8275.DOI:10.1137/17M115712X
-
[21]
Goal-oriented optimal design of experiments for large-scale Bayesian linear inverse problems
Ahmed Attia, Alen Alexanderian, and Arvind K. Saibaba. “Goal-oriented optimal design of experiments for large-scale Bayesian linear inverse problems”. In:Inverse Problems34.9 (2018), p. 095009.DOI:10.1088/13 61-6420/aad210
work page doi:10.1088/13 2018
-
[22]
Sonja Wogrin et al. “From Data to Decisions: A Real-Time Measurement–Inversion–Prediction–Steering Framework for Hazardous Events and Health Monitoring”. In:Handbook of Dynamic Data Driven Applica- tions Systems. Ed. by Frederica Darema et al. Cham: Springer International Publishing, 2023, pp. 195–227. ISBN: 978-3-031-27985-0.DOI:10.1007/978-3-031-27986-7_8
-
[23]
Linear convergence of accelerated conditional gradient algorithms in spaces of measures
Konstantin Pieper and Daniel Walter. “Linear convergence of accelerated conditional gradient algorithms in spaces of measures”. In:ESAIM: Control, Optimisation and Calculus of Variations27 (2021), p. 38.ISSN: 1292-8119.DOI:10.1051/cocv/2021042
-
[24]
A low-rank solver for the stochastic unsteady Navier–Stokes problem
Howard C. Elman and Tengfei Su. “A low-rank solver for the stochastic unsteady Navier–Stokes problem”. In:Computer Methods in Applied Mechanics and Engineering364 (2020), p. 112948.ISSN: 0045-7825.DOI: 10.1016/j.cma.2020.112948
-
[25]
Flow patterns around heart valves: A numerical method
Charles S Peskin. “Flow patterns around heart valves: A numerical method”. In:Journal of Computational Physics10.2 (1972), pp. 252–271.ISSN: 0021-9991.DOI:https://doi.org/10.1016/0021-9991(72)90 065-4.URL:https://www.sciencedirect.com/science/article/pii/0021999172900654
-
[26]
Time–continuous and time–discontinuous space–time finite elements for advection– diffusion problems
Max von Danwitz et al. “Time–continuous and time–discontinuous space–time finite elements for advection– diffusion problems”. In:International Journal for Numerical Methods in Engineering124.14 (2023), pp. 3117– 3144.DOI:10.1002/nme.7241
-
[27]
Alexander N. Brooks and Thomas J.R. Hughes. “Streamline upwind/Petrov-Galerkin formulations for convec- tion dominated flows with particular emphasis on the incompressible Navier-Stokes equations”. In:Computer Methods in Applied Mechanics and Engineering32.1-3 (1982), pp. 199–259.DOI:10.1016/0045-7825(82 )90071-8
-
[28]
Baratta et al.DOLFINx: The next generation FEniCS problem solving environment
Igor A. Baratta et al.DOLFINx: The next generation FEniCS problem solving environment. 2023.DOI:10.52 81/zenodo.10447666
2023
-
[29]
Towards Real-Time Urban Physics Simulations with Digital Twins
Jacopo Bonari et al. “Towards Real-Time Urban Physics Simulations with Digital Twins”. In:2024 28th Inter- national Symposium on Distributed Simulation and Real Time Applications (DS-RT). IEEE, 2024, pp. 18–25. ISBN: 979-8-3315-2721-1.DOI:10.1109/DS-RT62209.2024.00013
-
[30]
Nitsche’s method for Navier–Stokes equations with slip boundary conditions
Ingeborg Gjerde and L. Scott. “Nitsche’s method for Navier–Stokes equations with slip boundary conditions”. In:Mathematics of Computation91.334 (2022), pp. 597–622.DOI:10.1090/mcom/3682
-
[31]
Goal-oriented optimal sensor placement for PDE-constrained inverse problems in crisis management
Marco Mattuschka et al. “Goal-oriented optimal sensor placement for PDE-constrained inverse problems in crisis management”. In:Computer Assisted Methods in Engineering and Science(Feb. 2026).DOI:10.24423 /cames.2026.1887. 10 Algorithmic Identification of Moving Contaminant Sources
arXiv 2026
-
[32]
Compact polarization lidar system at a 1550 nm wavelength for aerosol anomaly de- tection
Sebastian Zajonz et al. “Compact polarization lidar system at a 1550 nm wavelength for aerosol anomaly de- tection”. In:Applied Optics65.7 (2026), pp. 2229–2235.DOI:10.1364/AO.581511.URL:https://opg.op tica.org/ao/fulltext.cfm?uri=ao-65-7-2229. 11
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.