A Turbo-Inference Strategy for Object Detection and Instance Segmentation
Pith reviewed 2026-06-27 09:43 UTC · model grok-4.3
The pith
Turbo-inference strategy improves both object detection and instance segmentation by iterative task interaction.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
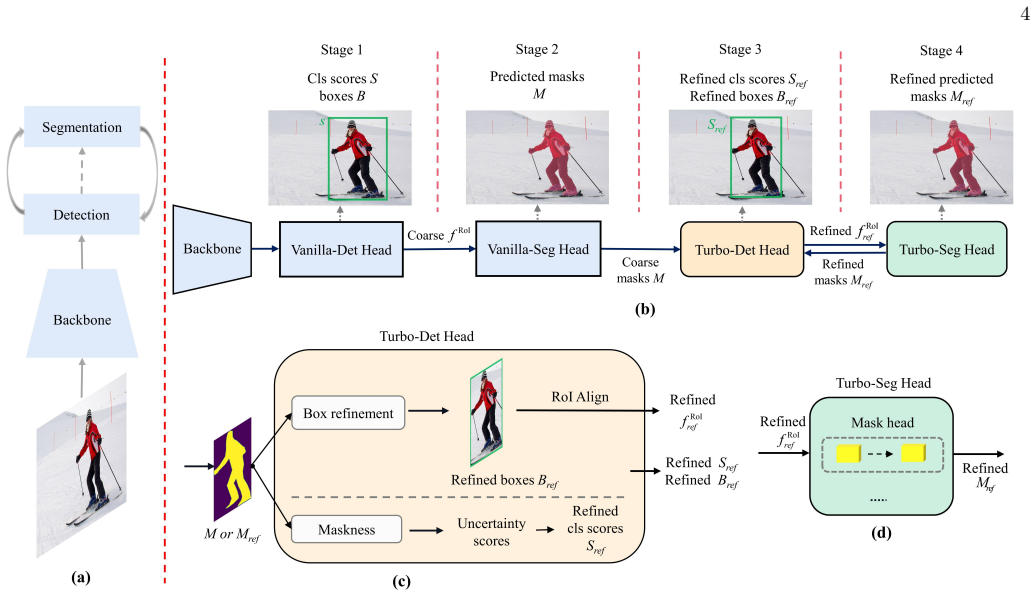
The turbo-inference strategy designs two modules, the turbo-detection head and the turbo-segmentation head, which form a closed loop that interlaces the detection and segmentation results iteratively without retraining the underlying model, leading to enhanced accuracies on both tasks.
What carries the argument
The turbo-detection head and turbo-segmentation head, which enable communication between detection and segmentation tasks in an iterative closed loop.
If this is right
- Detection accuracy increases due to feedback from segmentation.
- Instance segmentation accuracy increases due to better detection inputs.
- The method works across COCO, iFLYTEK, and Cityscapes datasets.
- It represents a tradeoff between higher prediction accuracy and increased inference time.
Where Pith is reading between the lines
- This approach could extend to other vision tasks where related outputs can mutually refine each other.
- Multiple iterations might yield further gains if computational budget allows.
- Similar loops could be applied in multi-task learning settings beyond detection and segmentation.
Load-bearing premise
The turbo-detection head and turbo-segmentation head can form an effective closed loop that interlaces detection and segmentation results without retraining the underlying model.
What would settle it
Running the method on a standard dataset like COCO and finding no improvement in either detection or segmentation metrics compared to the baseline would falsify the claim.
Figures


read the original abstract
Object detection and instance segmentation tasks are closely related. Existing top-down instance segmentation methods usually follow a detect-then-segment paradigm, where an initial detector is used to recognize and localize objects with bounding boxes, followed by the segmentation of an instance mask within each bounding box. In such methods, the detection accuracy directly influences the subsequent segmentation performance. However, previous research has seldom explored the impact of the instance segmentation task on object detection. In this paper, we present a turbo-inference strategy for the top-down methods that leverages the complementary information between detection and segmentation tasks iteratively. Specifically we design two modules: turbo-detection head and turbo-segmentation head, which facilitate communication between the tasks. The two modules form a closed loop that interlaces the detection and segmentation results without retraining the model. Comprehensive experiments on the COCO, iFLYTEK, and Cityscapes datasets demonstrate that our method substantially enhances both detection and segmentation accuracies with a certain increase in computational cost. The proposed method represents a tradeoff between prediction accuracy and inference speed. Codes are available at https://github.com/zhaozhen2333/Turbo-Learning.git.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a turbo-inference strategy for top-down object detection and instance segmentation. It introduces a turbo-detection head and turbo-segmentation head that form a closed loop to iteratively exchange complementary information between the tasks at inference time, without retraining the underlying model. Experiments on COCO, iFLYTEK, and Cityscapes are claimed to show substantial accuracy gains for both tasks, at the expense of increased computational cost, positioning the approach as an accuracy-speed tradeoff.
Significance. If the closed-loop mechanism can be shown to deliver consistent complementary gains without error accumulation or retraining, the method would offer a practical, model-agnostic inference-time enhancement for existing top-down pipelines. The absence of any quantitative baselines, ablations, or mechanism details in the provided abstract, however, prevents assessment of whether the central claim is supported by evidence.
major comments (2)
- [Abstract] Abstract: the claim of accuracy gains on COCO, iFLYTEK, and Cityscapes supplies no quantitative baselines, error bars, ablation details, or statistical tests, leaving the magnitude and reliability of the reported improvements unverifiable.
- [Abstract] Abstract: the turbo-detection head and turbo-segmentation head are asserted to form a closed loop that interlaces results without retraining, yet no equations, pseudocode, or communication mechanism is supplied; this is the load-bearing assumption whose correctness determines whether the accuracy improvements can hold.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the abstract to improve clarity and verifiability while preserving the manuscript's core contributions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of accuracy gains on COCO, iFLYTEK, and Cityscapes supplies no quantitative baselines, error bars, ablation details, or statistical tests, leaving the magnitude and reliability of the reported improvements unverifiable.
Authors: We agree the abstract should be more self-contained. The full manuscript reports specific quantitative results with baselines and ablations in the Experiments section. We will revise the abstract to include key numerical gains (e.g., AP improvements on COCO) and note that detailed ablations, error bars, and statistical information appear in the main text. revision: yes
-
Referee: [Abstract] Abstract: the turbo-detection head and turbo-segmentation head are asserted to form a closed loop that interlaces results without retraining, yet no equations, pseudocode, or communication mechanism is supplied; this is the load-bearing assumption whose correctness determines whether the accuracy improvements can hold.
Authors: The closed-loop mechanism, including the iterative information exchange between the two heads, is formalized with equations and illustrated in Section 3 of the manuscript. We will revise the abstract to include a concise description of the interlacing process and the fact that no retraining is required, while retaining the reference to the detailed exposition in the body. revision: yes
Circularity Check
No circularity: inference-time modules independent of training
full rationale
The paper describes a turbo-inference strategy as an inference-time addition using turbo-detection and turbo-segmentation heads that form a closed loop without retraining. No equations, fitted parameters, or derivations are presented that reduce to inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems. Experiments on external datasets (COCO, iFLYTEK, Cityscapes) provide independent empirical support, satisfying the self-contained criterion.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Ren, Shaoqing and He, Kaiming and Girshick, Ross and Sun, Jian , journal=. Faster
-
[2]
He, Kaiming and Gkioxari, Georgia and Doll. Mask. Proceedings of the IEEE International Conference on Computer Vision , pages=
-
[3]
Cai, Zhaowei and Vasconcelos, Nuno , booktitle=. Cascade
-
[4]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Hybrid task cascade for instance segmentation , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[5]
Huang, Zhaojin and Huang, Lichao and Gong, Yongchao and Huang, Chang and Wang, Xinggang , booktitle=. Mask
-
[6]
Proceedings of the IEEE International Conference on Computer Vision , pages=
Instances as queries , author=. Proceedings of the IEEE International Conference on Computer Vision , pages=
-
[7]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Deep residual learning for image recognition , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[8]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Aggregated residual transformations for deep neural networks , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[9]
Deformable
Zhu, Xizhou and Hu, Han and Lin, Stephen and Dai, Jifeng , booktitle=. Deformable
-
[10]
MMDetection: Open MMLab Detection Toolbox and Benchmark
MMDetection: Open mmlab detection toolbox and benchmark , author=. arXiv preprint arXiv:1906.07155 , year=
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[11]
Wang, Xinlong and Kong, Tao and Shen, Chunhua and Jiang, Yuning and Li, Lei , booktitle=
-
[12]
Wang, Xinlong and Zhang, Rufeng and Kong, Tao and Li, Lei and Shen, Chunhua , journal=
-
[13]
Bodla, Navaneeth and Singh, Bharat and Chellappa, Rama and Davis, Larry S , booktitle=
-
[14]
He, Yihui and Zhang, Xiangyu and Savvides, Marios and Kitani, Kris , journal=
-
[15]
Sun, Peize and Zhang, Rufeng and Jiang, Yi and Kong, Tao and Xu, Chenfeng and Zhan, Wei and Tomizuka, Masayoshi and Li, Lei and Yuan, Zehuan and Wang, Changhu and others , booktitle=. Sparse
-
[16]
Proceedings of the IEEE International Conference on Computer Vision , pages=
Instaboost: Boosting instance segmentation via probability map guided copy-pasting , author=. Proceedings of the IEEE International Conference on Computer Vision , pages=
-
[17]
Proceedings of the IEEE International Conference on Computer Vision , pages=
Focal loss for dense object detection , author=. Proceedings of the IEEE International Conference on Computer Vision , pages=
-
[18]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Class-balanced loss based on effective number of samples , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[19]
Zhang, Gang and Lu, Xin and Tan, Jingru and Li, Jianmin and Zhang, Zhaoxiang and Li, Quanquan and Hu, Xiaolin , booktitle=
-
[20]
Girshick, Ross , booktitle=. Fast
-
[21]
Microsoft
Lin, Tsung-Yi and Maire, Michael and Belongie, Serge and Hays, James and Perona, Pietro and Ramanan, Deva and Doll. Microsoft. European Conference on Computer Vision , pages=. 2014 , organization=
2014
-
[22]
The Winning Solution to the iFLYTEK Challenge 2021 Cultivated Land Extraction from High-Resolution Remote Sensing Images , year=
Zhao, Zhen and Liu, Yuqiu and Zhang, Gang and Tang, Liang and Hu, Xiaolin , booktitle=. The Winning Solution to the iFLYTEK Challenge 2021 Cultivated Land Extraction from High-Resolution Remote Sensing Images , year=
2021
-
[23]
IEEE Transactions on Pattern Analysis and Machine Intelligence , year=
Instance and panoptic segmentation using conditional convolutions , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , year=
-
[24]
Boundary-preserving
Cheng, Tianheng and Wang, Xinggang and Huang, Lichao and Liu, Wenyu , booktitle=. Boundary-preserving. 2020 , organization=
2020
-
[25]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Feature pyramid networks for object detection , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[26]
Bolya, Daniel and Zhou, Chong and Xiao, Fanyi and Lee, Yong Jae , booktitle=
-
[27]
European Conference on Computer Vision , pages=
End-to-end object detection with transformers , author=. European Conference on Computer Vision , pages=. 2020 , organization=
2020
-
[28]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Deep occlusion-aware instance segmentation with overlapping bilayers , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[29]
Chen, Yinpeng and Dai, Xiyang and Liu, Mengchen and Chen, Dongdong and Yuan, Lu and Liu, Zicheng , booktitle=. Dynamic
-
[30]
Deformable
Zhu, Xizhou and Su, Weijie and Lu, Lewei and Li, Bin and Wang, Xiaogang and Dai, Jifeng , journal=. Deformable
-
[31]
Advances in Neural Information Processing Systems , volume=
Attention is all you need , author=. Advances in Neural Information Processing Systems , volume=
-
[32]
Proceedings of the European Conference on Computer Vision , pages=
Acquisition of localization confidence for accurate object detection , author=. Proceedings of the European Conference on Computer Vision , pages=
-
[33]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
The cityscapes dataset for semantic urban scene understanding , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[34]
Advances in Neural Information Processing Systems , volume=
Spatial transformer networks , author=. Advances in Neural Information Processing Systems , volume=
-
[35]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Deformable part models are convolutional neural networks , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[36]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Not all pixels are equal: Difficulty-aware semantic segmentation via deep layer cascade , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[37]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Rich feature hierarchies for accurate object detection and semantic segmentation , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[38]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Fully convolutional networks for semantic segmentation , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[39]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
You only look once: Unified, real-time object detection , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[40]
Ge, Zheng and Liu, Songtao and Wang, Feng and Li, Zeming and Sun, Jian , journal=
-
[41]
Redmon, Joseph and Farhadi, Ali , journal=
-
[42]
Tian, Zhi and Shen, Chunhua and Chen, Hao and He, Tong , booktitle=
-
[43]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Sparse instance activation for real-time instance segmentation , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[44]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Turbo learning framework for human-object interactions recognition and human pose estimation , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[45]
Revisiting
Cheng, Bowen and Wei, Yunchao and Shi, Honghui and Feris, Rogerio and Xiong, Jinjun and Huang, Thomas , booktitle=. Revisiting
-
[46]
European Conference on Computer Vision , pages=
Conditional Convolutions for Instance Segmentation , author=. European Conference on Computer Vision , pages=
-
[47]
Lyu, Chengqi and Zhang, Wenwei and Huang, Haian and Zhou, Yue and Wang, Yudong and Liu, Yanyi and Zhang, Shilong and Chen, Kai , journal=
-
[48]
He, Junjie and Li, Pengyu and Geng, Yifeng and Xie, Xuansong , booktitle=
-
[49]
Wang, Chien-Yao and Bochkovskiy, Alexey and Liao, Hong-Yuan Mark , booktitle=
-
[50]
Li, Chuyi and Li, Lulu and Jiang, Hongliang and Weng, Kaiheng and Geng, Yifei and Li, Liang and Ke, Zaidan and Li, Qingyuan and Cheng, Meng and Nie, Weiqiang and others , journal=
-
[51]
Bochkovskiy, Alexey and Wang, Chien-Yao and Liao, Hong-Yuan Mark , journal=
-
[52]
Xu, Shangliang and Wang, Xinxin and Lv, Wenyu and Chang, Qinyao and Cui, Cheng and Deng, Kaipeng and Wang, Guanzhong and Dang, Qingqing and Wei, Shengyu and Du, Yuning and others , journal=
-
[53]
Chen, Kai and Wang, Jiaqi and Pang, Jiangmiao and Cao, Yuhang and Xiong, Yu and Li, Xiaoxiao and Sun, Shuyang and Feng, Wansen and Liu, Ziwei and Xu, Jiarui and Zhang, Zheng and Cheng, Dazhi and Zhu, Chenchen and Cheng, Tianheng and Zhao, Qijie and Li, Buyu and Lu, Xin and Zhu, Rui and Wu, Yue and Dai, Jifeng and Wang, Jingdong and Shi, Jianping and Ouyan...
-
[54]
Vu, Thang and Kang, Haeyong and Yoo, Chang D , booktitle=
-
[55]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Instance segmentation by jointly optimizing spatial embeddings and clustering bandwidth , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[56]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Path aggregation network for instance segmentation , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[57]
Wang, Chien-Yao and Liao, Hong-Yuan Mark and Wu, Yueh-Hua and Chen, Ping-Yang and Hsieh, Jun-Wei and Yeh, I-Hau , booktitle=
-
[58]
Liu, Shilong and Li, Feng and Zhang, Hao and Yang, Xiao and Qi, Xianbiao and Su, Hang and Zhu, Jun and Zhang, Lei , journal=
-
[59]
Zhang, Hao and Li, Feng and Liu, Shilong and Zhang, Lei and Su, Hang and Zhu, Jun and Ni, Lionel M and Shum, Heung-Yeung , journal=
-
[60]
Li, Feng and Zhang, Hao and Xu, Huaizhe and Liu, Shilong and Zhang, Lei and Ni, Lionel M and Shum, Heung-Yeung , booktitle=
-
[61]
Dong, Bin and Zeng, Fangao and Wang, Tiancai and Zhang, Xiangyu and Wei, Yichen , journal=
-
[62]
2022 , organization=
Pei, Jialun and Cheng, Tianyang and Fan, Deng-Ping and Tang, He and Chen, Chuanbo and Van Gool, Luc , booktitle=. 2022 , organization=
2022
-
[63]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
Mask encoding for single shot instance segmentation , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[64]
Liu, Ze and Lin, Yutong and Cao, Yue and Hu, Han and Wei, Yixuan and Zhang, Zheng and Lin, Stephen and Guo, Baining , booktitle=
-
[65]
Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
A convnet for the 2020s , author=. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pages=
-
[66]
European Conference on Computer Vision , pages=
Exploring plain vision transformer backbones for object detection , author=. European Conference on Computer Vision , pages=. 2022 , organization=
2022
-
[67]
Woo, Sanghyun and Debnath, Shoubhik and Hu, Ronghang and Chen, Xinlei and Liu, Zhuang and Kweon, In So and Xie, Saining , booktitle=
-
[68]
Wang, Xinlong and Yu, Zhiding and De Mello, Shalini and Kautz, Jan and Anandkumar, Anima and Shen, Chunhua and Alvarez, Jose M , booktitle=
-
[69]
2023 , publisher=
Zhou, Huayi and Jiang, Fei and Lu, Hongtao , journal=. 2023 , publisher=
2023
-
[70]
2023 , publisher=
Yang, Xiaobao and He, Yulong and Wu, Junsheng and Sun, Wei and Liu, Tianyu and Ma, Sugang , journal=. 2023 , publisher=
2023
-
[71]
Computer Vision and Image Understanding , volume=
Faster training of Mask R-CNN by focusing on instance boundaries , author=. Computer Vision and Image Understanding , volume=. 2019 , publisher=
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.