Tracking in-silico Lagrangian sensors in a lab-scale stirred tank reactor
Pith reviewed 2026-06-27 06:13 UTC · model grok-4.3
The pith
In-silico Lagrangian sensors in a stirred tank reactor can be tracked in three dimensions from noisy accelerometer and magnetometer data, with position errors below 10%.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
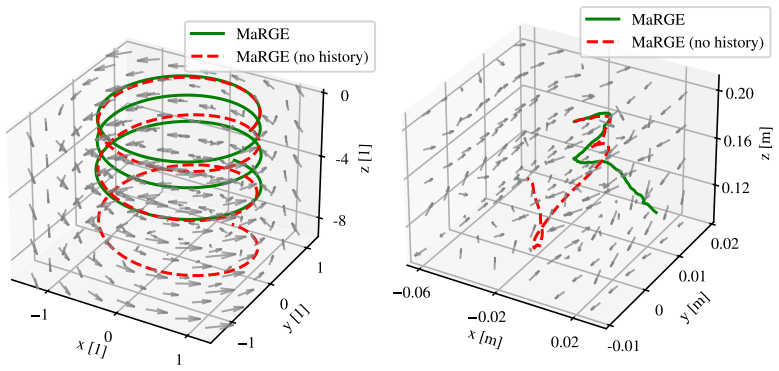
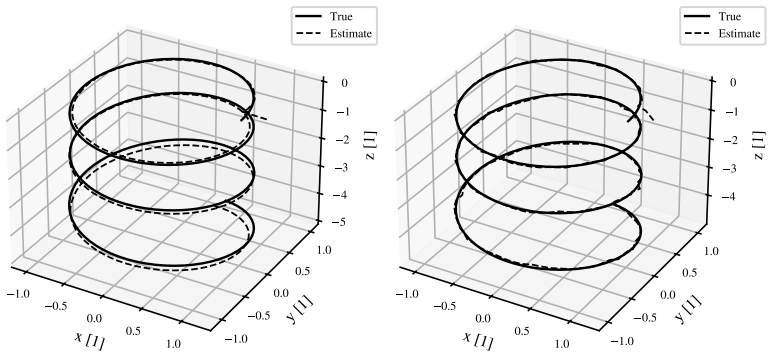
Filtering algorithms that use a bespoke dynamical model to convert accelerometer and magnetometer readings into position estimates can reconstruct the trajectories of in-silico Lagrangian sensors moving in a three-dimensional vortex or in the experimentally measured flow field of a lab-scale stirred tank reactor, with errors below 10% when the Maxey-Riley-Gatignol equations serve as ground truth.
What carries the argument
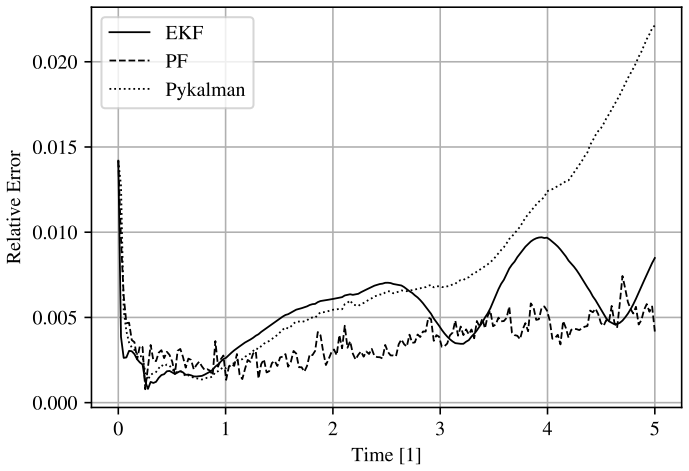
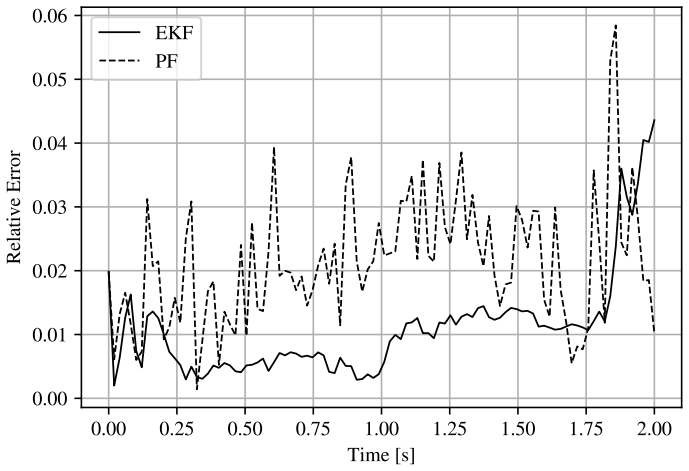
Filtering algorithms (extended Kalman filter, particle filter, unscented Kalman filter) driven by a bespoke dynamical model that converts noisy accelerometer and magnetometer readings into position estimates.
If this is right
- The same filtering pipeline works for both analytically prescribed flow and experimentally recorded flow inside the tank.
- All three filter types (extended Kalman, particle, unscented Kalman) produce usable position estimates under the tested noise levels.
- The approach is tied to the specific sensor design that supplies only accelerometer and magnetometer data.
- Reconstruction remains possible when the input data are generated from the Maxey-Riley-Gatignol description of inertial particle motion.
Where Pith is reading between the lines
- If the dynamical model remains accurate when the sensors are made physical, the method could move from synthetic tests to live reactor monitoring without additional hardware.
- The same IMU-plus-filter combination might apply to particle tracking in other confined flows where optical access is poor.
- Performance could be checked by varying the noise level or the tank impeller speed to map the region where errors stay below 10%.
Load-bearing premise
The bespoke dynamical model inside the filters accurately describes how the sensors actually move through the reactor flow field.
What would settle it
Release physical versions of the sensors in the real stirred tank, record their true positions with an independent method such as high-speed imaging, and check whether the filter outputs still stay within 10% error of those measured positions.
Figures

read the original abstract
Lagrangian sensors have shown promise to improve operator awareness of conditions inside a chemical reactor but three-dimensional tracking remains a mostly unsolved challenge. We explore a setup where in-silico sensors, based on a recently proposed real-world design, are tracked using data from an accelerometer and magnetometer available from a built-in inertial measurement unit. Filtering algorithms, using a bespoke dynamical model, are used to process these readings into position estimates. We compare tracking performance of an extended Kalman filter, a particle filter and the unscented Kalman filter implemented in the pykalman library. Our numerical experiments track in-silico particles moving in an analytically given three dimensional vortex as well as in the experimentally measured flow-field of a lab-scale stirred tank reactor. Using the Maxey-Riley-Gatignol equations for the movement of inertial particles as ground-truth, we demonstrate that trajectories can be reconstructed from noisy synthetic data with errors below 10%.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript investigates three-dimensional tracking of in-silico Lagrangian sensors inside a lab-scale stirred tank reactor. Synthetic IMU data (accelerometer and magnetometer) are generated from trajectories obeying the Maxey-Riley-Gatignol equations in both an analytic vortex and an experimentally measured flow field; these data are then processed by an extended Kalman filter, an unscented Kalman filter, and a particle filter that employ a bespoke dynamical model to produce position estimates. The central claim is that trajectories can be reconstructed with errors below 10 percent.
Significance. If the bespoke model accurately captures the sensor dynamics, the numerical experiments would constitute a controlled demonstration that standard nonlinear filters can recover particle paths from noisy IMU measurements in a realistic reactor flow. The use of an independent ground-truth generator (Maxey-Riley-Gatignol) rather than self-consistent synthetic data is a methodological strength that allows direct assessment of tracking error.
major comments (1)
- [Abstract] Abstract (paragraph on filtering algorithms): the manuscript does not state whether the bespoke dynamical model inside the EKF/UKF/particle filter is identical to, or a close approximation of, the Maxey-Riley-Gatignol equations used to generate the ground-truth trajectories. This distinction is load-bearing for the headline claim; identical models would render the reported sub-10% errors unsurprising and would not demonstrate robustness to the model mismatch that must occur when the filter is applied to real sensors.
minor comments (1)
- The abstract mentions the pykalman implementation but supplies no information on filter initialization, process-noise covariance tuning, or the precise form of the measurement model; these details are needed for reproducibility even if the model-equivalence issue is resolved.
Simulated Author's Rebuttal
We thank the referee for the constructive comment and the opportunity to clarify the relationship between our filter model and the ground-truth generator. We address the point below and will revise the manuscript to make the modeling assumptions explicit.
read point-by-point responses
-
Referee: [Abstract] Abstract (paragraph on filtering algorithms): the manuscript does not state whether the bespoke dynamical model inside the EKF/UKF/particle filter is identical to, or a close approximation of, the Maxey-Riley-Gatignol equations used to generate the ground-truth trajectories. This distinction is load-bearing for the headline claim; identical models would render the reported sub-10% errors unsurprising and would not demonstrate robustness to the model mismatch that must occur when the filter is applied to real sensors.
Authors: We agree that the distinction is important and that the current wording leaves it ambiguous. The bespoke dynamical model inside the filters is a reduced-order approximation of the Maxey-Riley-Gatignol equations: it retains the leading inertial, drag, and added-mass terms but drops higher-order Faxén corrections and uses a simplified interpolation of the fluid velocity field. This deliberate mismatch relative to the full MRG ground-truth generator is what allows us to claim robustness. We will revise both the abstract and the methods section to state this approximation explicitly, include a brief quantification of the omitted terms, and discuss the implications for real-sensor deployment. revision: yes
Circularity Check
No significant circularity; derivation self-contained against external ground truth
full rationale
The paper generates synthetic data from the Maxey-Riley-Gatignol equations as independent ground truth and feeds noisy IMU readings into filters whose internal dynamics are described as a separate 'bespoke dynamical model.' No equation or section reduces the reported <10% tracking error to a fit performed on the same data, nor does any load-bearing step rely on a self-citation chain or imported uniqueness result. The validation therefore tests the filters against an external generator rather than reproducing an input by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The Maxey-Riley-Gatignol equations accurately describe the motion of inertial particles in the flow field.
Reference graph
Works this paper leans on
-
[1]
A. Amador, M. Canals, Design and development of an instrumented drifter for lagrangian measurements of inertial particle dynamics in breaking waves, IEEE Journal of Oceanic Engineering 41 (1) (2016) 82–93.doi:10.1109/JOE.2015.2389591. URLhttps://dx.doi.org/10.1109/JOE.2015.2389591
-
[2]
F. Feddersen, A. Amador, K. Pick, A. Vizuet, K. Quinn, E. Wolfinger, J. H. MacMahan, A. Fincham, The wavedrifter: a low-cost imu-based lagrangian drifter to observe steepening and overturning of surface grav- ity waves and the transition to turbulence, Coastal Engineering Journal 66 (1) (2024) 44–57.doi:10.1080/21664250.2023.2238949. URLhttps://doi.org/10...
-
[3]
R. Cox, S. Felder, Injury-free transport of fish through closed conduit components, Journal of Ecohydraulics 11 (1) (2026) 1–16
2026
-
[4]
Bryant, Ph.D
J. Bryant, Ph.D. thesis, University of Cambridge (1969)
1969
-
[5]
R. Mann, P. Mavros, J. Middleton, A structured stochastic flow model for interpreting flow-follower data from a stirred vessel, Trans IChemE 59 (1981) 271–278. 21
1981
-
[6]
Bisgaard, M
J. Bisgaard, M. Muldbak, T. Tajsoleiman, T. Rydal, T. Rasmussen, J. K. Huusom, K. V. Gernaey, Characterization of mixing performance in bioreactors using flow-following sensor devices, Ph.D. thesis (2021)
2021
-
[7]
J. Bisgaard, M. Muldbak, S. Cornelissen, T. Tajsoleiman, J. K. Huusom, T. Rasmussen, K. V. Gernaey, Flow-following sensor devices: A tool for bridging data and model predictions in large-scale fermentations, Com- putational and Structural Biotechnology Journal 18 (2020) 2908–2919. doi:10.1016/j.csbj.2020.10.004. URLhttps://doi.org/10.1016/j.csbj.2020.10.004
-
[8]
M. Muldbak, C. Gargalo, U. Kr¨ uhne, I. Udugama, K. V. Gernaey, Digi- tal twin of a pilot-scale bio-production setup, in: Y. Yamashita, M. Kano (Eds.), 14th International Symposium on Process Systems Engineering, Vol. 49 of Computer Aided Chemical Engineering, Elsevier, 2022, p. 1417–1422.doi:10.1016/B978-0-323-85159-6.50236-0. URLhttps://doi.org/10.1016/...
-
[9]
C. Haringa, T. Tajsoleiman, W. A. van Winden, D. Dong, R. M. Gladue, L. Wu, T. Rasmussen, H. J. Noorman, Flow-following sensor technology, a route to validated cfd models, Biochemical Engineering Journal 215 (2025) 109623.doi:10.1016/j.bej.2024.109623. URLhttps://doi.org/10.1016/j.bej.2024.109623
-
[10]
J. Bisgaard, T. Tajsoleiman, M. Muldbak, T. Rydal, T. Rasmussen, J. K. Huusom, K. V. Gernaey, Automated compartment model develop- ment based on data from flow-following sensor devices, Processes 9 (9) (2021).doi:10.3390/pr9091651. URLhttps://www.mdpi.com/2227-9717/9/9/1651
-
[11]
J. Bisgaard, M. Muldbak, T. Tajsoleiman, T. Rydal, T. Rasmussen, J. K. Huusom, K. V. Gernaey, Characterization of mixing performance in bioreactors using flow-following sensor devices, Chemical Engineering Research and Design 174 (2021) 471–485.doi:10.1016/j.cherd.2021. 08.008. URLhttps://doi.org/10.1016/j.cherd.2021.08.008
-
[12]
S. F. Reinecke, L. Buntkiel, R. Kipping, U. Hampel, Process character- ization in industrial vessels by flow-following sensor particles, Measure- ment Science and Technology 33 (9) (2022).doi:10.1088/1361-6501/ 22 ac75af. URLhttps://doi.org/10.1088/1361-6501/ac75af
-
[13]
S. Hofmann, L. Buntkiel, R. Rautenbach, L. Gaugler, Y. Ma, I. Haase, J. Fitschen, T. Wucherpfennig, S. F. Reinecke, M. Hoffmann, R. Takors, U. Hampel, M. Schl¨ uter, Experimental analysis of lifelines in a 15,000 l bioreactor by means of lagrangian sensor particles, Chemical Engineer- ing Research and Design 205 (2024) 695–712.doi:10.1016/j.cherd. 2024.04...
-
[14]
Hofmann, R
S. Hofmann, R. Rautenbach, L. Buntkiel, I. S. Brouwers, L. Gaugler, J. Barczyk, J. Fitschen, S. Reinecke, M. Hoffmann, R. Takors, et al., Lagrangian sensor particles for detecting hydrodynamic heterogeneities in industrial bioreactors: experimental analysis and lattice-boltzmann simulations, Chemical Engineering Journal Advances 22 (2025) 100744
2025
-
[15]
Reinecke, A
S. Reinecke, A. Deutschmann, K. Jobst, H. Kryk, E. Friedrich, U. Ham- pel, Flow following sensor particles—validation and macro-mixing anal- ysis in a stirred fermentation vessel with a highly viscous substrate, Biochemical engineering journal 69 (2012) 159–171
2012
-
[16]
S. F. Reinecke, A. Deutschmann, K. Jobst, U. Hampel, Macro-mixing characterisation of a stirred model fermenter of non-newtonian liquid by flow following sensor particles and ert, Chemical Engineering Research and Design 118 (2017) 1–11
2017
-
[17]
R. Rautenbach, S. Hofmann, L. Buntkiel, J. Sch¨ afer, S. F. Reinecke, M. Hoffmann, U. Hampel, M. Schl¨ uter, Dynamics of lagrangian sensor particles: The effect of non-homogeneous mass distribution, Processes 12 (8) (2024).doi:10.3390/pr12081617. URLhttps://dx.doi.org/10.3390/pr12081617
-
[18]
J. A. Sykes, D. Weston, N. Adio, H. Che, R. Hart-Villamil, A. L. Nicu¸ san, W. Peace, D. Rhymer, D. Werner, T. Kokalova-Wheldon, A. Ingram, C. R. Windows-Yule, Validation of simulations of particulate, fluid and multiphase systems using positron emission particle tracking: A review, Particuology 101 (2025) 117–145.doi:10.1016/j.partic. 2024.06.015. URLhtt...
-
[19]
S. Hofmann, C. Weiland, J. Fitschen, A. von Kameke, M. Hoffmann, M. Schl¨ uter, Lagrangian sensors in a stirred tank reactor: Comparing trajectories from 4d-particle tracking velocimetry and lattice-boltzmann simulations, Chemical Engineering Journal 449 (2022) 137549.doi: 10.1016/j.cej.2022.137549. URLhttps://doi.org/10.1016/j.cej.2022.137549
-
[20]
Tropea, A
C. Tropea, A. L. Yarin, J. F. Foss, et al., Springer handbook of experi- mental fluid mechanics, Vol. 1, Springer, 2007
2007
-
[21]
L. Buntkiel, Y. Ma, S. F. Reinecke, U. Hampel, Orientation re- solved measurements of accelerations with sensor particles in bioreac- tors, tm - Technisches Messen 90 (12) (2023) 835–845.doi:10.1515/ teme-2023-0115. URLhttps://doi.org/10.1515/teme-2023-0115
-
[22]
Lange, Reliable localization in a bioreactor, Microelectronic News, accessed February 2026 (2019)
S. Lange, Reliable localization in a bioreactor, Microelectronic News, accessed February 2026 (2019)
2026
-
[23]
J. Cox, W. Zhang, T. Furukawa, Motion tracking with coupled magne- tometers and dynamic imu measurement fusion in nonuniform magnetic fields, in: 2023 26th International Conference on Information Fusion (FUSION), 2023, p. 1–8.doi:10.23919/FUSION52260.2023.10224146. URLhttps://doi.org/10.23919/FUSION52260.2023.10224146
-
[24]
H. Hellmers, A. Norrdine, J. Blankenbach, A. Eichhorn, An imu/magnetometer-based indoor positioning system using kalman fil- tering, in: International Conference on Indoor Positioning and Indoor Navigation, 2013, p. 1–9.doi:10.1109/IPIN.2013.6817887. URLhttps://dx.doi.org/10.1109/IPIN.2013.6817887
-
[25]
M. Menolotto, D.-S. Komaris, S. Tedesco, B. O’Flynn, M. Walsh, Mo- tion capture technology in industrial applications: A systematic review, Sensors 20 (19) (2020).doi:10.3390/s20195687. URLhttps://www.mdpi.com/1424-8220/20/19/5687
-
[26]
F. Wu, Y. Liang, Y. Fu, X. Ji, A robust indoor positioning system based on encoded magnetic field and low-cost imu, in: 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), IEEE, 2016, pp. 204–212. 24
2016
-
[27]
Duckworth, pykalman: Kalman filter, smoother, and em algo- rithm for python,https://github.com/pykalman/pykalman, accessed: YYYY-MM-DD (2012)
D. Duckworth, pykalman: Kalman filter, smoother, and em algo- rithm for python,https://github.com/pykalman/pykalman, accessed: YYYY-MM-DD (2012)
2012
-
[28]
V. Rathi, Vamika-rathi/in-silico-tracking: In-silico lagrangian sensor tracking in a stirred tank reactor: filtering code (Jun. 2026).doi: 10.5281/zenodo.20629013. URLhttps://doi.org/10.5281/zenodo.20629013
-
[29]
V. Pasku, A. De Angelis, G. De Angelis, D. D. Arumugam, M. Dionigi, P. Carbone, A. Moschitta, D. S. Ricketts, Magnetic field-based position- ing systems, IEEE Communications Surveys & Tutorials 19 (3) (2017) 2003–2017.doi:10.1109/COMST.2017.2684087
-
[30]
Gel¨ aschus, L
A. Gel¨ aschus, L. Rennpferdt, V. Rathi, M. Hussain, D. Ruprecht, H. K. Trieu, Millimeter-scale lagrangian sensor spheres for local state moni- toring in smart reactors: Towards energy-autonomous operation, Sub- mitted to Industrial & Engineering Chemistry Research (2026)
2026
-
[31]
A. Edelstein, Advances in magnetometry, Journal of Physics: Con- densed Matter 19 (16) (2007) 165217.doi:10.1088/0953-8984/19/ 16/165217. URLhttps://dx.doi.org/10.1088/0953-8984/19/16/165217
-
[32]
M. R. Maxey, J. J. Riley, Equation of motion for a small rigid sphere in a nonuniform flow, The Physics of Fluids 26 (4) (1983) 883–889. doi:10.1063/1.864230
-
[33]
Gatignol, The Faxen Formulae For A Rigid Particle In An Unsteady Non-Uniform Stokes Flow, Journal De Mecanique Theorique Et Ap- pliquee 2 (2) (1983) 143–160
R. Gatignol, The Faxen Formulae For A Rigid Particle In An Unsteady Non-Uniform Stokes Flow, Journal De Mecanique Theorique Et Ap- pliquee 2 (2) (1983) 143–160
1983
-
[34]
A. Daitche, Advection of inertial particles in the presence of the his- tory force: Higher order numerical schemes, Journal of Computational Physics 254 (2013) 93–106.doi:10.1016/j.jcp.2013.07.024
-
[35]
Urizarna-Carasa, D
J. Urizarna-Carasa, D. Ruprecht, A. von Kameke, K. Padberg-Gehle, Relevance of the basset history term for lagrangian particle dynamics, Chaos: An Interdisciplinary Journal of Nonlinear Science 35 (7) (2025). 25
2025
-
[36]
Rathi, D
V. Rathi, D. Ruprecht, Numerical modeling of inertial particles in three- dimensional fluid flow, PAMM 26 (2) (2026) e70158
2026
-
[37]
S. G. Prasath, V. Vasan, R. Govindarajan, Accurate solution method for the maxey–riley equation, and the effects of basset history, Journal of Fluid Mechanics 868 (2019) 428–460
2019
-
[38]
Crowe, M
C. Crowe, M. Sommerfeld, Y. Tsuji, et al., Multiphase flows with droplets and particles, CRC Press Taylor Francis Group, Boca Raton, 1998
1998
-
[39]
Candelier, J
F. Candelier, J. Angilella, M. Souhar, On the effect of the boussinesq– basset force on the radial migration of a stokes particle in a vortex, Physics of Fluids 16 (5) (2004) 1765–1776
2004
-
[40]
C. Weiland, E. Steuwe, J. Fitschen, M. Hoffmann, M. Schl¨ uter, K. Padberg-Gehle, A. von Kameke, Computational study of three- dimensional lagrangian transport and mixing in a stirred tank reactor, Chemical Engineering Journal Advances 14 (2023) 100448. doi:10.1016/j.ceja.2023.100448. URLhttps://www.sciencedirect.com/science/article/pii/ S2666821123000066
-
[41]
D. Schanz, S. Gesemann, A. Schr¨ oder, Shake-the-box: Lagrangian par- ticle tracking at high particle image densities, Experiments in Fluids 57 (5) (2016) 70.doi:10.1007/s00348-016-2157-1. URLhttps://doi.org/10.1007/s00348-016-2157-1
-
[42]
Kameke, R
A. Kameke, R. Uphoff, E. Steuwe, J. Nissen, M. Hoffmann, M. Schl, F. Kexel, Experimental analysis of time resolved three-dimensional ve- locity and vorticity fields behind single rising bubbles using lagrangian particle tracking velocimetry, Chemical Engineering Science (2026) 123403
2026
-
[43]
Baer, findiff software package,https://github.com/maroba/ findiff(2018)
M. Baer, findiff software package,https://github.com/maroba/ findiff(2018). URLhttps://github.com/maroba/findiff
2018
-
[44]
L. A. McGee, S. F. Schmidt, Discovery of the kalman filter as a practical tool for aerospace and industry, Tech. rep. (1985). 26
1985
-
[45]
Becker, Kalman filter from the ground up, Kalmanfilter
A. Becker, Kalman filter from the ground up, Kalmanfilter. net, 2024
2024
-
[46]
Bradbury, R
J. Bradbury, R. Frostig, P. Hawkins, M. J. Johnson, Y. Katariya, C. Leary, D. Maclaurin, G. Necula, A. Paszke, J. VanderPlas, S. Wanderman-Milne, Q. Zhang, JAX: composable transformations of Python+NumPy programs (2018). URLhttp://github.com/jax-ml/jax
2018
-
[47]
P. Djuric, J. Kotecha, J. Zhang, Y. Huang, T. Ghirmai, M. Bugallo, J. Miguez, Particle filtering, IEEE Signal Processing Magazine 20 (5) (2003) 19–38.doi:10.1109/MSP.2003.1236770
-
[48]
Z. Chen, Bayesian filtering: From kalman filters to particle filters, and beyond, Statistics 182 (01 2003).doi:10.1080/02331880309257
-
[49]
Elfring, E
J. Elfring, E. Torta, R. van de Molengraft, Particle filters: A hands-on tutorial, Sensors (Basel, Switzerland) 21 (2021). URLhttps://api.semanticscholar.org/CorpusID:231595612
2021
-
[50]
B. Siebler, O. Heirich, A. Lehner, S. Sand, U. Hanebeck, Robust particle filter for magnetic field-based train localization, 2022.doi:10.33012/ 2022.18536
arXiv 2022
-
[51]
H. Zhang, F. Martin, Robotic mapping assisted by local magnetic field anomalies, in: 2011 IEEE Conference on Technologies for Prac- tical Robot Applications, 2011, pp. 25–30.doi:10.1109/TEPRA.2011. 5753476
-
[52]
Herbst, F
E. Herbst, F. Schorfheide, Tempered particle filtering, Journal of Econo- metrics 210 (1) (2019) 26–44
2019
-
[53]
Kuptametee, N
C. Kuptametee, N. Aunsri, A review of resampling techniques in particle filtering framework, Measurement 193 (2022) 110836
2022
-
[54]
T. Li, S. Sun, T. P. Sattar, J. M. Corchado, Fight sample degeneracy and impoverishment in particle filters: A review of intelligent approaches, Expert Systems with applications 41 (8) (2014) 3944–3954
2014
-
[55]
S. J. Julier, J. K. Uhlmann, New extension of the kalman filter to nonlin- ear systems, in: Signal processing, sensor fusion, and target recognition VI, Vol. 3068, Spie, 1997, pp. 182–193. 27
1997
-
[56]
Chen, F.-W
Q. Chen, F.-W. Liu, S. K. Cho, K. Kim, 3-d real-time ultrasound track- ing of acoustically actuated swimming microdrone, Scientific Reports 14 (1) (2024) 1547
2024
-
[57]
Berahmand, F
K. Berahmand, F. Daneshfar, E. S. Salehi, Y. Li, Y. Xu, Autoencoders and their applications in machine learning: a survey, Artificial intelli- gence review 57 (2) (2024) 28. 28
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.