WireCraft: A Simulation Benchmark for Industrial DLO Manipulation
Pith reviewed 2026-06-27 00:29 UTC · model grok-4.3
The pith
WireCraft benchmark shows privileged RL succeeds on industrial wire tasks while vision policies struggle with contact-rich alignment.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
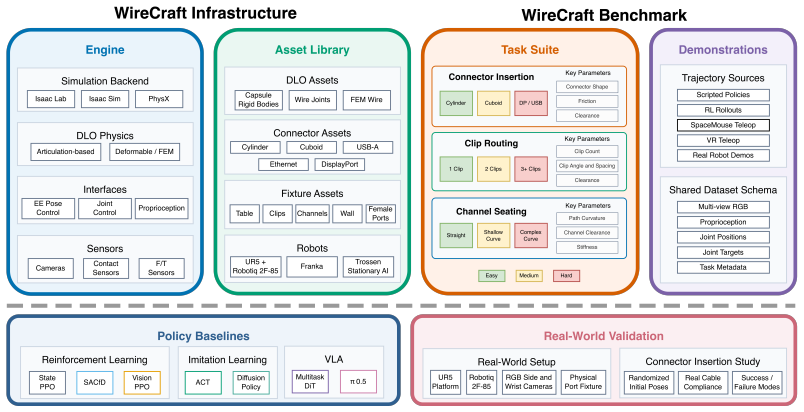
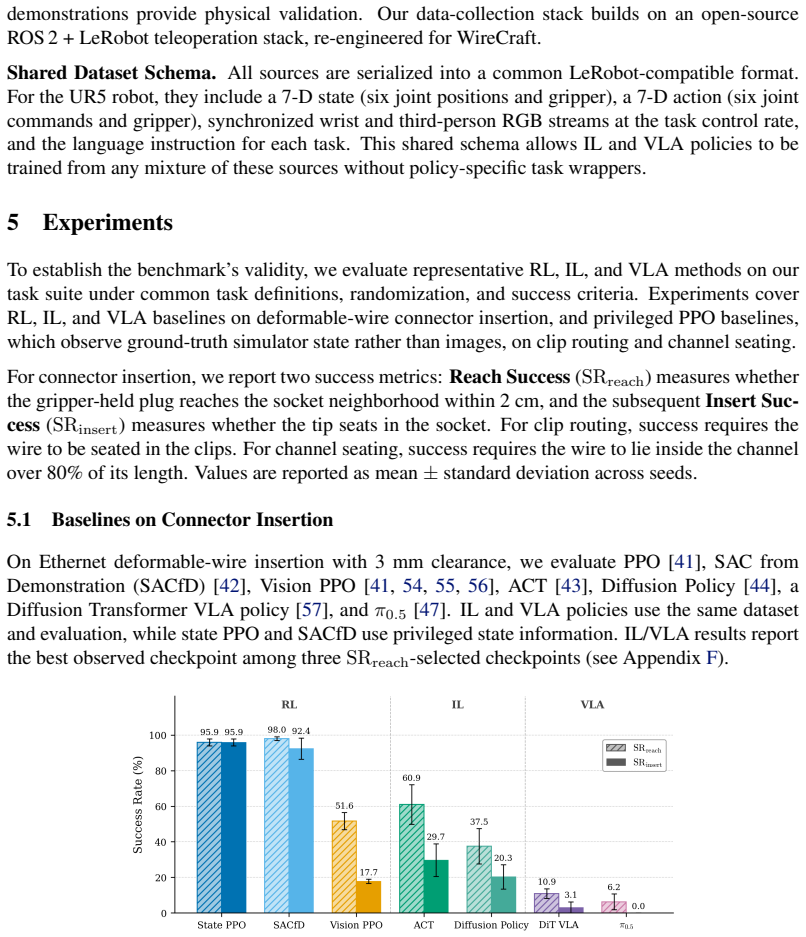
The authors present WireCraft, a configurable simulation benchmark spanning connector insertion, clip routing, and channel seating tasks for deformable linear objects. Using trajectories from simulation and a physical UR5 robot, they benchmark multiple policy types and find that privileged state-based reinforcement learning solves representative settings in each family with over 82% success, while the transition to contact-rich alignment in connector insertion remains difficult for vision RL, IL, and VLA policies, indicating that industrial DLO manipulation is tractable under privileged information but an open challenge for vision-based approaches.
What carries the argument
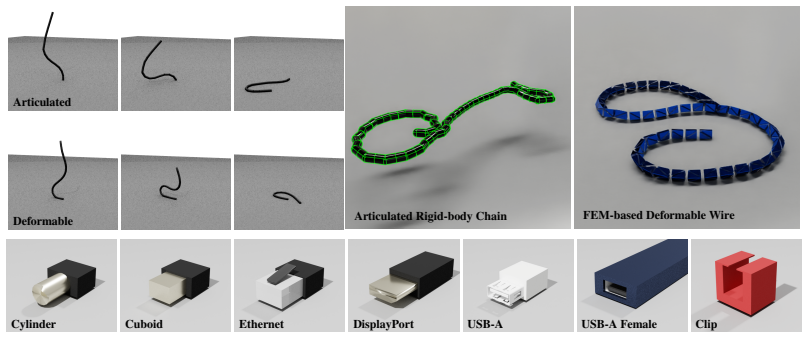
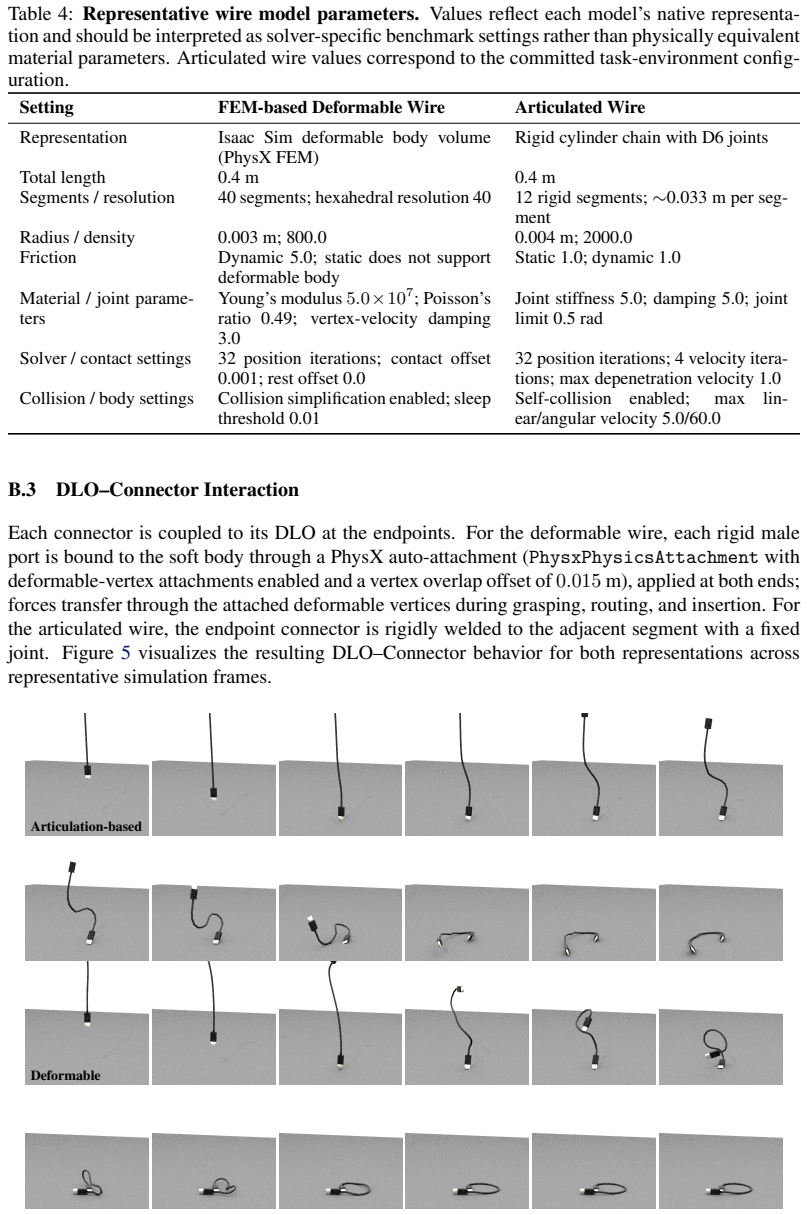
The WireCraft simulation benchmark with its three task families, articulated and deformable DLO physics models, configurable assets, and shared evaluation metrics across RL, IL, and VLA policies.
If this is right
- Privileged state information makes each task family solvable by current reinforcement learning methods.
- The shift from free-space reaching to contact-rich alignment in connector insertion is the primary remaining difficulty for vision-based approaches.
- The benchmark supplies modular, customizable assets that support controlled variation in task difficulty.
- Standardized metrics across RL, IL, and VLA allow direct comparison of policy families on the same tasks.
Where Pith is reading between the lines
- Better handling of contact transitions in vision models could narrow the performance gap to privileged-state methods.
- Extending the benchmark to include more sequential multi-step assemblies would test generalization beyond the current three families.
- Real-world validation on physical hardware would test whether the privileged success rates translate outside simulation.
Load-bearing premise
The simulation environments and task definitions accurately capture the dynamics and contact behaviors of real industrial DLO manipulation.
What would settle it
Demonstrating a vision-based policy that reaches over 80 percent success on the connector insertion task under the same simulation conditions would falsify the claim that contact-rich alignment remains a key bottleneck.
Figures



read the original abstract
Deformable Linear Objects (DLOs), such as wires and cables, are central to industrial assembly. Unlike rigid objects, whose state is captured by a 6-DoF pose, DLOs have an infinite-dimensional configuration space and deform continuously under contact with grippers, fixtures, and the workspace, making them a demanding benchmark for general dexterous manipulation. Despite their importance, policy development and comparison remain difficult: existing benchmarks are often tied to specific hardware setups, lack modular and customizable task assets, or study generic deformable-object tasks without the fixtures relevant to real-world industrial wire manipulation. Few benchmarks align simulation, real-world data, and shared evaluation protocols. To bridge this gap, we introduce WireCraft, a simulation benchmark for industrial DLO manipulation with configurable difficulty and assets, spanning three task families: connector insertion, clip routing, and channel seating. It supports two complementary DLO physics models, articulated and deformable, and the trajectories come from both simulation and a physical UR5. We benchmark reinforcement learning (RL), imitation learning (IL), and vision-language-action (VLA) policies under shared metrics. Privileged state-based RL solves a representative setting in each task family with over 82\% success, confirming the tasks are well-posed. For connector insertion, however, the transition from reaching the socket to contact-rich alignment remains a key bottleneck for vision RL, IL, and VLA policies. These results indicate that industrial DLO manipulation, though tractable under privileged state, remains an open challenge for current vision-based learning. The benchmark, data, and tools will be open-sourced upon acceptance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces WireCraft, a simulation benchmark for industrial Deformable Linear Object (DLO) manipulation spanning connector insertion, clip routing, and channel seating. It supports articulated and deformable DLO physics models, provides trajectories from both simulation and a physical UR5, and evaluates RL, IL, and VLA policies under shared metrics. The central empirical claim is that privileged state-based RL achieves over 82% success on representative settings in each task family (confirming the tasks are well-posed), while vision-based methods encounter a key bottleneck in the transition to contact-rich alignment for connector insertion.
Significance. If the simulation environments faithfully reproduce real contact dynamics, the benchmark would provide a valuable, modular platform for comparing learning methods on industrially relevant DLO tasks with configurable difficulty, shared evaluation protocols, and both simulation and real trajectories. The explicit promise to open-source the benchmark, data, and tools upon acceptance is a concrete strength that would enable reproducibility and community use.
major comments (2)
- [Abstract] Abstract: The claim that privileged state-based RL success rates >82% confirm the tasks are well-posed rests on the assumption that the two DLO physics models accurately reproduce real industrial contact forces, friction, and deformation; however, the manuscript provides no quantitative sim-to-real metrics (e.g., force-torque residuals or configuration error distributions) for the contact-rich phases identified as bottlenecks, despite noting trajectories collected on a physical UR5.
- [Abstract] Abstract: Performance numbers are stated without specifying simulation fidelity parameters, data exclusion rules, or exact evaluation protocols (success criteria, episode lengths, randomization ranges), which prevents independent verification that the reported privileged RL results demonstrate the tasks are solvable in principle rather than artifacts of the chosen simulator settings.
minor comments (1)
- [Abstract] The abstract would benefit from reporting per-task-family success rates rather than the aggregate 'over 82%' figure to allow readers to assess variability across connector insertion, clip routing, and channel seating.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the abstract. We address each point below and indicate planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that privileged state-based RL success rates >82% confirm the tasks are well-posed rests on the assumption that the two DLO physics models accurately reproduce real industrial contact forces, friction, and deformation; however, the manuscript provides no quantitative sim-to-real metrics (e.g., force-torque residuals or configuration error distributions) for the contact-rich phases identified as bottlenecks, despite noting trajectories collected on a physical UR5.
Authors: We agree that the lack of quantitative sim-to-real metrics (such as force-torque residuals or configuration errors) for contact-rich phases weakens the claim that the >82% success rates confirm the tasks are well-posed for real industrial use. Real UR5 trajectories were collected to enable future transfer studies and qualitative checks, but no such quantitative analysis was performed. In revision we will modify the abstract to state that the success rates demonstrate solvability within the provided simulation environments and will add an explicit limitations paragraph on the sim-to-real gap. We cannot supply the requested metrics because they were not computed. revision: partial
-
Referee: [Abstract] Abstract: Performance numbers are stated without specifying simulation fidelity parameters, data exclusion rules, or exact evaluation protocols (success criteria, episode lengths, randomization ranges), which prevents independent verification that the reported privileged RL results demonstrate the tasks are solvable in principle rather than artifacts of the chosen simulator settings.
Authors: The full experimental protocols, including simulation fidelity settings, success criteria, episode lengths, randomization ranges, and any data exclusion rules, are detailed in Section 4 and the supplementary material. We will revise the abstract to include a direct reference or footnote to these sections so that the reported numbers can be independently verified against the stated protocols. revision: yes
- Quantitative sim-to-real metrics for contact-rich phases
Circularity Check
No circularity; empirical benchmark with no derivation chain
full rationale
The paper introduces WireCraft as a simulation benchmark for DLO tasks and reports empirical success rates (>82% for privileged RL) to support that tasks are well-posed. This is a direct experimental claim with no equations, fitted parameters renamed as predictions, self-definitional steps, or load-bearing self-citations. The work is self-contained as a benchmark paper; the sim-to-real assumption is an external validity issue, not a reduction of any derivation to its inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
J. Zhu, A. Cherubini, C. Dune, D. Navarro-Alarcon, F. Alambeigi, D. Berenson, F. Ficuciello, K. Harada, J. Kober, X. Li, et al. Challenges and outlook in robotic manipulation of deformable objects.IEEE Robotics & Automation Magazine, 29(3):67–77, 2022
2022
-
[2]
Zhang, H.-C
X. Zhang, H.-C. Lin, Y . Zhao, and M. Tomizuka. Harnessing with twisting: Single-arm de- formable linear object manipulation for industrial harnessing task. In2024 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), pages 4069–4075. IEEE, 2024
2024
-
[3]
Wilson, H
A. Wilson, H. Jiang, W. Lian, and W. Yuan. Cable routing and assembly using tactile- driven motion primitives. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 10408–10414. IEEE, 2023
2023
-
[4]
J. Luo, C. Xu, X. Geng, G. Feng, K. Fang, L. Tan, S. Schaal, and S. Levine. Multistage cable routing through hierarchical imitation learning.IEEE Transactions on Robotics, 40: 1476–1491, 2024
2024
-
[5]
S. Jin, W. Lian, C. Wang, M. Tomizuka, and S. Schaal. Robotic cable routing with spatial representation.IEEE Robotics and Automation Letters, 7(2):5687–5694, 2022. doi:10.1109/ LRA.2022.3158377
arXiv 2022
-
[6]
M. Yu, H. Zhong, and X. Li. Shape control of deformable linear objects with offline and online learning of local linear deformation models. In2022 International Conference on Robotics and Automation (ICRA), pages 1337–1343. IEEE, 2022
2022
-
[7]
F. Gu, Z. Wang, Z. Zhu, J. Ma, Y . Zhou, S. Jiang, and B. He. A survey on robotic manipulation of deformable objects: Recent advances, open challenges and new frontiers.Neurocomputing, page 134058, 2026
2026
-
[8]
Zhang, K
W. Zhang, K. Schmeckpeper, P. Chaudhari, and K. Daniilidis. Deformable linear object predic- tion using locally linear latent dynamics. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 13503–13509. IEEE, 2021
2021
-
[9]
Raman, Ankit Shah, and Stefanie Tellex
M. Li and C. Choi. Learning for deformable linear object insertion leveraging flexibility esti- mation from visual cues. In2024 IEEE International Conference on Robotics and Automation (ICRA), page 5183–5189. IEEE, May 2024. doi:10.1109/icra57147.2024.10610419. URL http://dx.doi.org/10.1109/ICRA57147.2024.10610419
-
[10]
B. Cao, X. Zang, X. Zhang, Z. Chen, S. Li, and J. Zhao. Shape control of elastic deformable linear objects for robotic cable assembly.Advanced Intelligent Systems, 6(7):2300835, 2024
2024
-
[11]
M. Yan, Y . Zhu, N. Jin, and J. Bohg. Self-supervised learning of state estimation for ma- nipulating deformable linear objects.IEEE robotics and automation letters, 5(2):2372–2379, 2020
2020
-
[12]
James, Z
S. James, Z. Ma, D. R. Arrojo, and A. J. Davison. Rlbench: The robot learning benchmark & learning environment.IEEE Robotics and Automation Letters, 5(2):3019–3026, 2020
2020
-
[13]
S. Tao, F. Xiang, A. Shukla, Y . Qin, X. Hinrichsen, X. Yuan, C. Bao, X. Lin, Y . Liu, T. kai Chan, Y . Gao, X. Li, T. Mu, N. Xiao, A. Gurha, V . N. Rajesh, Y . W. Choi, Y .-R. Chen, Z. Huang, R. Calandra, R. Chen, S. Luo, and H. Su. Maniskill3: Gpu parallelized robotics simulation and rendering for generalizable embodied ai.Robotics: Science and Systems, 2025
2025
-
[14]
X. Lin, Y . Wang, J. Olkin, and D. Held. Softgym: Benchmarking deep reinforcement learning for deformable object manipulation. InConference on Robot Learning, pages 432–448. PMLR, 2021. 9
2021
-
[15]
Seita, P
D. Seita, P. Florence, J. Tompson, E. Coumans, V . Sindhwani, K. Goldberg, and A. Zeng. Learning to rearrange deformable cables, fabrics, and bags with goal-conditioned transporter networks. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 4568–4575. IEEE, 2021
2021
-
[16]
S. Chen, Y . Xu, C. Yu, L. Li, X. Ma, Z. Xu, and D. Hsu. Daxbench: Benchmarking deformable object manipulation with differentiable physics. InThe Eleventh International Conference on Learning Representations, 2023
2023
-
[17]
Adversarial imitation learning with tra- jectorial augmentation and correction,
R. Laezza, R. Gieselmann, F. T. Pokorny, and Y . Karayiannidis. Reform: A robot learning sandbox for deformable linear object manipulation. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 4717–4723, 2021. doi:10.1109/ICRA48506.2021. 9561766
-
[18]
J. Cao, Y . Wang, Z. Xiong, C. Lin, Z. Chen, and C. Gan. DLO-Lab: Benchmarking deformable linear object manipulations with differentiable physics. InProceedings of the 43rd Interna- tional Conference on Machine Learning (ICML), 2026. URLhttps://icml.cc/virtual/ 2026/poster/63391. Accepted
2026
-
[19]
M. Li, H. Yu, Y . Huang, Y . Hong, C. Choi, and H. Ye. Hierarchical dlo routing with re- inforcement learning and in-context vision-language models, 2025. URLhttps://arxiv. org/abs/2510.19268
Pith/arXiv arXiv 2025
-
[20]
Tanureza, B
J. Tanureza, B. Michalak, M. Radke, and K. Haninger. Industrial cabling in constrained en- vironments: a practical approach and current challenges. In2025 IEEE/SICE International Symposium on System Integration (SII), pages 1428–1433. IEEE, 2025
2025
-
[21]
Kienle, B
C. Kienle, B. Alt, F. Schneider, T. Pertlwieser, R. J ¨akel, and R. Rayyes. Ai-based framework for robust model-based connector mating in robotic wire harness installation. In2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), pages 2444–
-
[22]
Assembly Performance Metrics and Test Methods.https://www.nist.gov/el/intelligent-systems-division-73500/ robotic-grasping-and-manipulation-assembly/assembly, 2018
National Institute of Standards and Technology. Assembly Performance Metrics and Test Methods.https://www.nist.gov/el/intelligent-systems-division-73500/ robotic-grasping-and-manipulation-assembly/assembly, 2018. Accessed: 2026- 05-22
2018
-
[23]
Y . Chen, K. Kimble, E. H. Adelson, T. Asfour, P. Chanrungmaneekul, S. Chitta, Y . Chitambar, Z. Chen, K. Goldberg, D. Kragic, et al. Manipulationnet: An infrastructure for benchmark- ing real-world robot manipulation with physical skill challenges and embodied multimodal reasoning.arXiv preprint arXiv:2603.04363, 2026
arXiv 2026
-
[24]
Huang, Y
Z. Huang, Y . Hu, T. Du, S. Zhou, H. Su, J. B. Tenenbaum, and C. Gan. Plasticinelab: A soft-body manipulation benchmark with differentiable physics. InInternational Conference on Learning Representations, 2021
2021
-
[25]
Zhang, K
Y . Zhang, K. S. Luck, F. Verdoja, V . Kyrki, and J. Pajarinen. Modesuite: Robot learning task suite for benchmarking mobile manipulation with deformable objects.IEEE Robotics and Automation Letters, 2026
2026
-
[26]
Q. J. Chen, T. Bretl, and Q.-C. Pham. Accurate simulation and parameter identification of deformable linear objects using discrete elastic rods in generalized coordinates. In2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 20454– 20460, 2025. doi:10.1109/IROS60139.2025.11247160
-
[27]
Bergou, M
M. Bergou, M. Wardetzky, S. Robinson, B. Audoly, and E. Grinspun. Discrete elastic rods. In ACM Siggraph 2008 Papers, pages 1–12. 2008. 10
2008
-
[28]
Z. Sun, J. Zhu, and R. B. Fisher. DexDLO: Learning goal-conditioned dexterous policy for dynamic manipulation of deformable linear objects. In2024 IEEE International Conference on Robotics and Automation (ICRA), pages 16009–16015. IEEE, 2024. doi:10.1109/ICRA57147. 2024.10610754
-
[29]
Y . Chen, Y . Zhang, Z. Brei, T. Zhang, Y . Chen, J. Wu, and R. Vasudevan. Differentiable discrete elastic rods for real-time modeling of deformable linear objects. In P. Agrawal, O. Kroemer, and W. Burgard, editors,Proceedings of The 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 2996–3014. PMLR, 2025. URLh...
2025
-
[30]
Y . Chen, X. Wu, Y . Zong, Y . Chen, A. Li, B. Zhang, and R. Vasudevan. DEFT: Differen- tiable branched discrete elastic rods for modeling furcated DLOs in real-time.arXiv preprint arXiv:2502.15037, 2025. doi:10.48550/arXiv.2502.15037. URLhttps://arxiv.org/abs/ 2502.15037
-
[31]
Govoni, N
A. Govoni, N. Zubair, S. Soprani, and G. Palli. Performance analysis of a mass-spring-damper deformable linear object model in robotic simulation frameworks. InEuropean Robotics Forum 2025, volume 36 ofSpringer Proceedings in Advanced Robotics, pages 187–192. Springer,
2025
-
[32]
doi:10.1007/978-3-031-89471-8 29
-
[33]
M. Li, H. Yu, and C. Choi. Routing manipulation of deformable linear object using reinforce- ment learning and diffusion policy. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 01–07, 2025. doi:10.1109/ICRA55743.2025.11127451
-
[34]
T. Z. Zhao, J. Luo, O. Sushkov, R. Pevceviciute, N. Heess, J. Scholz, S. Schaal, and S. Levine. Offline meta-reinforcement learning for industrial insertion. In2022 IEEE International Con- ference on Robotics and Automation (ICRA), pages 6386–6393. IEEE, 2022
2022
-
[35]
B. Cao, X. Zang, S. Li, X. Zhang, C. le Li, and J. Zhao. Robotic cable following and in- sertion with tactile sensing.IEEE Sensors Journal, 26:6216–6224, 2026. URLhttps: //api.semanticscholar.org/CorpusID:284252279
2026
-
[36]
H. Zhou, S. Li, Q. Lu, and J. Qian. A practical solution to deformable linear object manip- ulation: A case study on cable harness connection. In2020 5th International Conference on Advanced Robotics and Mechatronics (ICARM), pages 329–333. IEEE, 2020
2020
-
[37]
M. Yu, K. Lv, C. Wang, Y . Jiang, M. Tomizuka, and X. Li. Generalizable whole-body global manipulation of deformable linear objects by dual-arm robot in 3-d constrained environments. The International Journal of Robotics Research, 44(4):607–639, 2025
2025
-
[38]
W. Li, Z. Zhu, D. Li, Z. Gong, N. Lv, H. Chen, and J. Li. An automated cable laying simulation method by robot for planar routing. InProceedings of the 2025 11th Annual International Conference on Network and Information Systems for Computers, ICNISC ’25, page 209–214, New York, NY , USA, 2025. Association for Computing Machinery. ISBN 9798400715839. doi:...
-
[39]
P. Chang, R. Luo, M. Zolotas, and T. Padır. Manipulation of deformable linear objects in benchmark task spaces. In2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), pages 1910–1916, 2022. doi:10.1109/CASE49997.2022.9926677
-
[40]
Kimble, J
K. Kimble, J. Albrecht, M. Zimmerman, and J. Falco. Performance measures to benchmark the grasping, manipulation, and assembly of deformable objects typical to manufacturing ap- plications.Frontiers in Robotics and AI, 9:999348, 2022
2022
-
[41]
Azulay, K
O. Azulay, K. Kondap, J. Drake, S. Xie, H. Li, S. Chitta, and K. Goldberg. Motorcycle 1.0: Automating bimanual cable routing around fixtures on the nist task board. In2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), pages 2636–2641. IEEE, 2025. 11
2025
-
[42]
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov. Proximal policy optimization algorithms.arXiv preprint arXiv:1707.06347, 2017
Pith/arXiv arXiv 2017
-
[43]
M. Vecerik, T. Hester, J. Scholz, F. Wang, O. Pietquin, B. Piot, N. Heess, T. Roth¨orl, T. Lampe, and M. Riedmiller. Leveraging demonstrations for deep reinforcement learning on robotics problems with sparse rewards.arXiv preprint arXiv:1707.08817, 2017
Pith/arXiv arXiv 2017
-
[44]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware.Robotics: Science and Systems (RSS), 2023. doi:10.15607/RSS.2023. XIX.016
-
[45]
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion.The International Journal of Robotics Research, 44(10-11):1684–1704, 2025
2025
-
[46]
W. Peebles and S. Xie. Scalable diffusion models with transformers.2023 IEEE/CVF In- ternational Conference on Computer Vision (ICCV), pages 4172–4182, 2023. doi:10.1109/ iccv51070.2023.00387
arXiv 2023
-
[47]
Z. Hou, T. Zhang, Y . Xiong, H. Duan, H. Pu, R. Tong, C. Zhao, X. Zhu, Y . Qiao, J. Dai, et al. Dita: Scaling diffusion transformer for generalist vision-language-action policy. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 7686– 7697, 2025
2025
-
[48]
Black, N
K. Black, N. Brown, et al.π 0.5: a vision-language-action model with open-world generaliza- tion. InProceedings of the 9th Conference on Robot Learning (CoRL), 2025. Oral Presentation
2025
-
[49]
Hoang, H
T. Hoang, H. Le, P. Becker, V . A. Ngo, and G. Neumann. Geometry-aware rl for manipu- lation of varying shapes and deformable objects. InInternational Conference on Learning Representations, volume 2025, pages 47376–47405, 2025
2025
-
[50]
E. Xing, V . Luk, and J. Oh. Stabilizing reinforcement learning in differentiable multiphysics simulation. InInternational Conference on Learning Representations, volume 2025, pages 91165–91198, 2025
2025
-
[51]
M. Mittal et al. Isaac lab: A gpu-accelerated simulation framework for multi-modal robot learning.arXiv preprint arXiv:2511.04831, 2025
Pith/arXiv arXiv 2025
-
[52]
Nvidia isaac sim.https://github.com/isaac-sim/IsaacSim, 2026
NVIDIA. Nvidia isaac sim.https://github.com/isaac-sim/IsaacSim, 2026. URL https://docs.isaacsim.omniverse.nvidia.com/latest/index.html
2026
-
[53]
Interacting with a Deformable Object
Isaac Lab Project Developers. Interacting with a Deformable Object. Isaac Lab Doc- umentation, 2026. URLhttps://isaac-sim.github.io/IsaacLab/main/source/ tutorials/01_assets/run_deformable_object.html. Accessed: 2026-05-16
2026
-
[54]
Soft Bodies
NVIDIA. Soft Bodies. PhysX Documentation, 2024. URLhttps://nvidia-omniverse. github.io/PhysX/physx/5.4.0/docs/SoftBodies.html. Accessed: 2026-05-16
2024
-
[55]
Oquab, T
M. Oquab, T. Darcet, T. Moutakanni, H. V o, M. Szafraniec, V . Khalidov, P. Fernandez, D. Haz- iza, F. Massa, A. El-Nouby, et al. Dinov2: Learning robust visual features without supervision. Transactions on Machine Learning Research Journal, 2024
2024
-
[56]
Jaegle, S
A. Jaegle, S. Borgeaud, J.-B. Alayrac, C. Doersch, C. Ionescu, D. Ding, S. Koppula, D. Zoran, A. Brock, E. Shelhamer, et al. Perceiver io: A general architecture for structured inputs & outputs. InInternational Conference on Learning Representations, 2022
2022
-
[57]
Pinto, M
L. Pinto, M. Andrychowicz, P. Welinder, W. Zaremba, and P. Abbeel. Asymmetric actor critic for image-based robot learning. InRobotics: Science and Systems, 2018
2018
-
[58]
Cadene, S
R. Cadene, S. Alibert, A. Soare, Q. Gallouedec, A. Zouitine, S. Palma, P. Kooijmans, M. Ar- actingi, M. Shukor, D. Aubakirova, et al. Lerobot: State-of-the-art machine learning for real- world robotics in pytorch.https://github.com/huggingface/lerobot, 2024. 12 A Related Work We expand the related-work discussion from the main paper with a feature-level c...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.