Viking Hill Dataset: A Lidar-Radar-Camera Dataset for Detection and Segmentation in Forest Scenes
Pith reviewed 2026-06-26 20:42 UTC · model grok-4.3
The pith
A new multi-sensor forest dataset shows imaging radar achieving IoU scores competitive with lidar for ground and canopy segmentation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
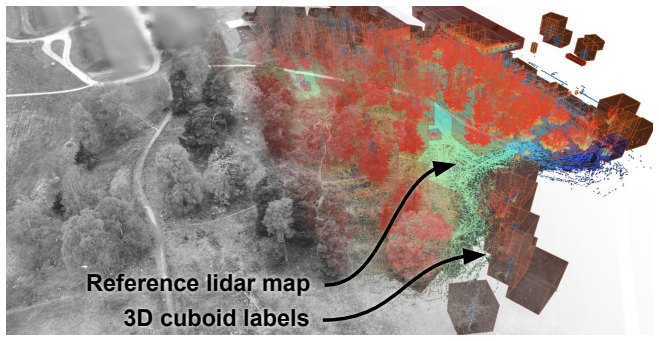
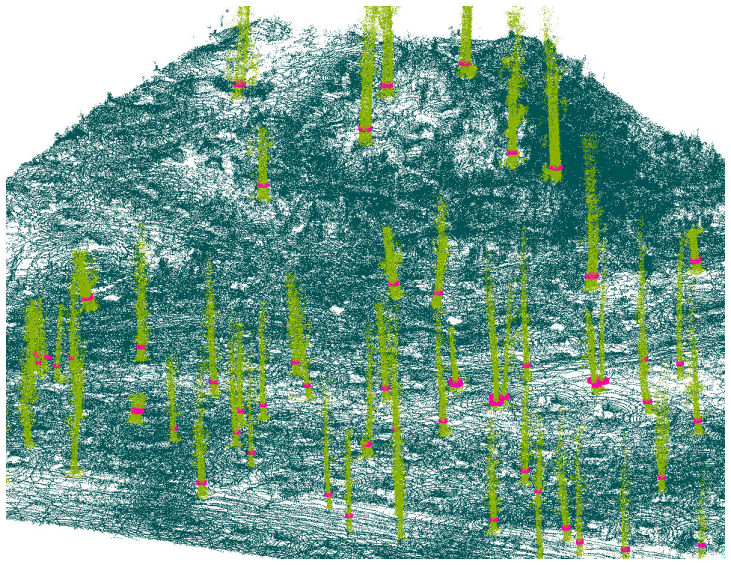
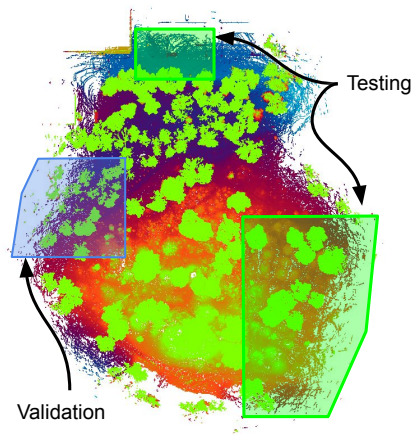
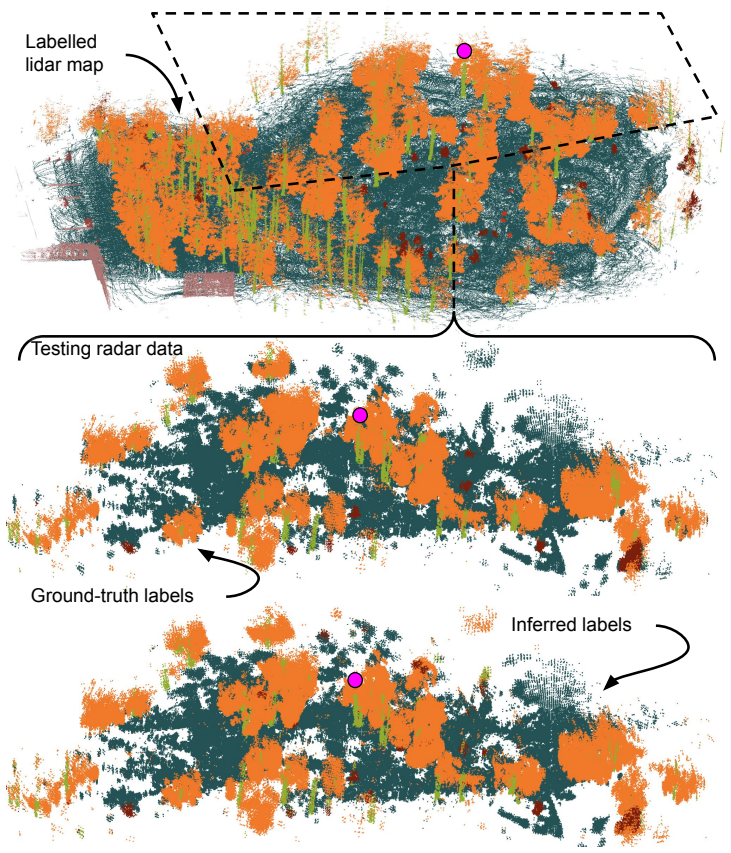
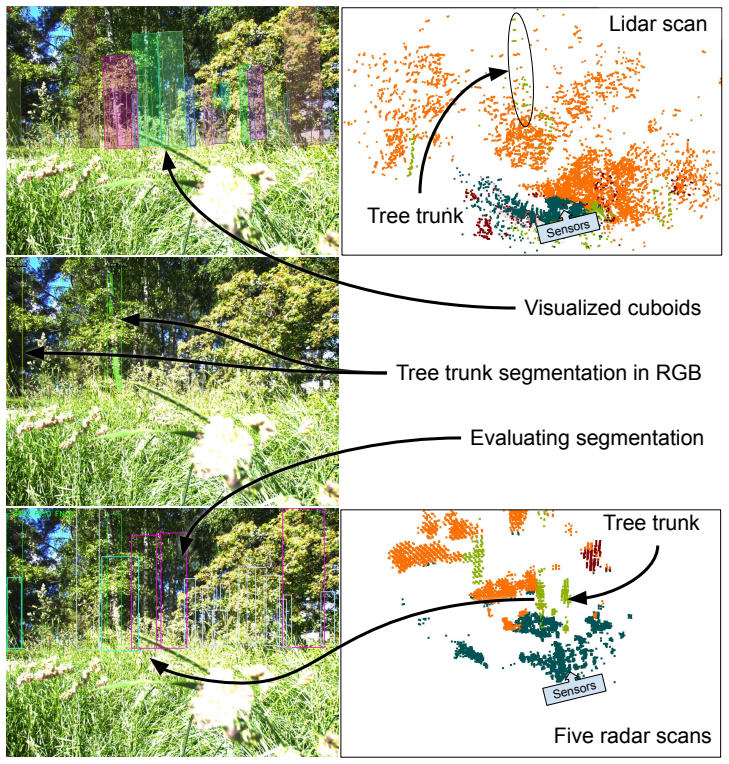
The Viking Hill Dataset supplies co-registered high-resolution FMCW radar, lidar and camera recordings from forest sites under contrasting vegetation states together with 3D cuboid annotations that include per-tree diameter estimates. These shared labels enable direct comparison of semantic segmentation performance across modalities, revealing that radar reaches IoU scores of 91 percent on ground and 86 percent on canopy, competitive with lidar, while lagging on tree trunks at 56 percent versus lidar's 74 percent.
What carries the argument
The 3D cuboid annotations that assign shared semantic labels across radar, lidar and camera point clouds, enabling modality-comparative segmentation benchmarks.
If this is right
- Radar can serve as a reliable primary sensor for large-scale classes such as ground and canopy in forest navigation systems.
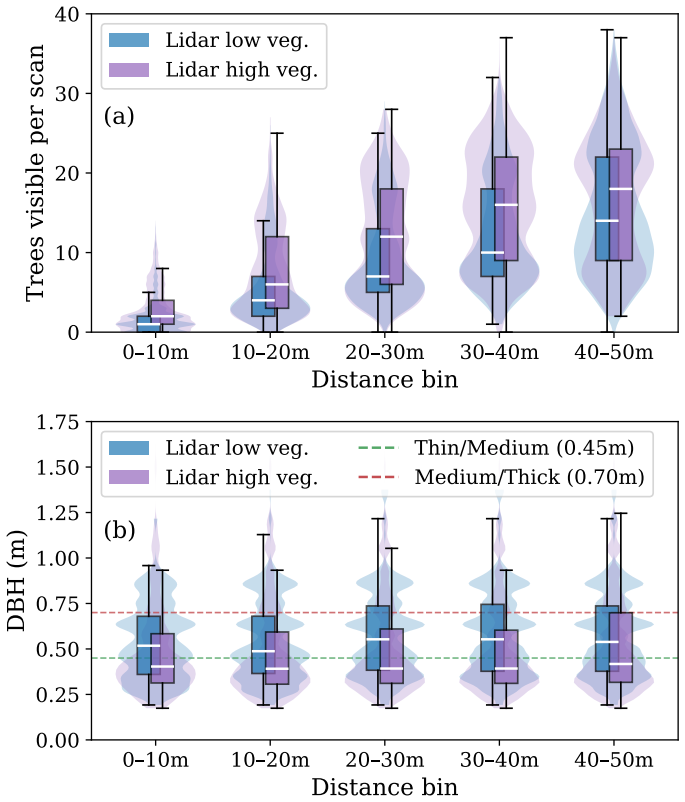
- Diameter-stratified evaluation shows segmentation quality improves with larger tree size for both modalities.
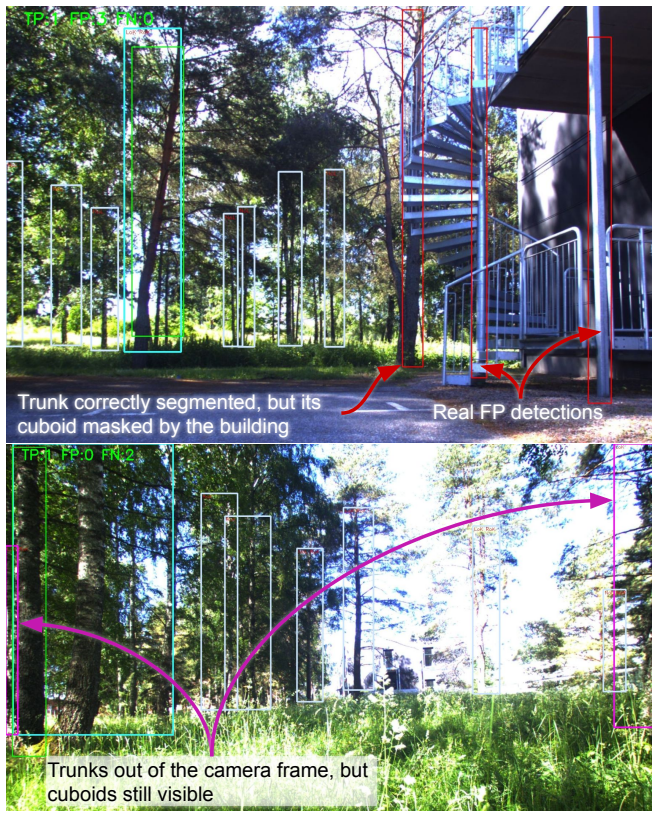
- Cross-modality comparison against RGB detection models highlights where radar complements camera-based trunk detection.
- The co-registered data and precise RTK-GNSS positioning enable development of multi-sensor mapping and localization pipelines.
Where Pith is reading between the lines
- The dataset could be used to train fusion networks that retain radar's resilience while adding lidar detail on trunks.
- Seasonal contrast between the two sessions provides a ready testbed for assessing long-term robustness of perception algorithms.
- Future extensions might add dynamic elements or additional radar operating modes to probe occlusion handling.
Load-bearing premise
The 3D cuboid annotations give accurate shared semantic labels across the three sensors and the two recording sessions represent typical contrasting forest conditions.
What would settle it
Re-running MinkowskiUNet on the released point clouds and finding radar IoU for ground or canopy more than ten points below the reported lidar figures would falsify the competitiveness claim.
Figures



read the original abstract
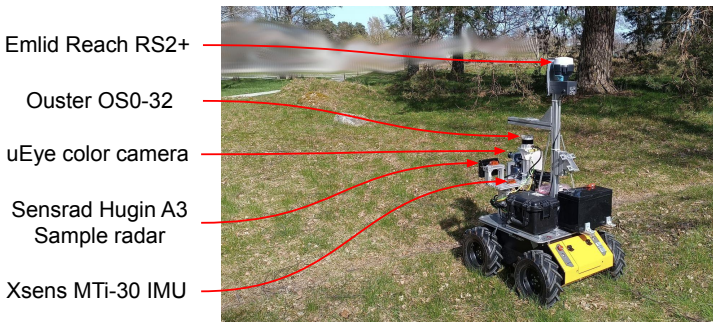
Autonomous robots operating under forest canopies need robust perception of trees and surrounding vegetation across varying seasonal conditions. Existing forestry datasets provide lidar or camera data with per-tree annotations, but none include co-registered 4D imaging radar -- a modality of growing interest for its resilience to visual degradation, surface contamination, and vegetation occlusion. We introduce a multi-sensor forest dataset collected by a mobile robot equipped with a high-resolution FMCW imaging radar, lidar, RGB camera, IMU, and RTK-GNSS. The site was recorded in two sessions under contrasting vegetation states, and 3D cuboid annotations -- including per-tree diameter estimates -- provide shared semantic labels across all three perception modalities. Furthermore, we provide baseline results for semantic segmentation of the radar and lidar point clouds using MinkowskiUNet. Radar achieves IoU scores competitive with lidar for dominant classes (ground 91%, canopy 86%) while lagging on geometrically fine structures such as tree trunks (56% vs. 74%). A cross-modality analysis further compares lidar and radar trunk segmentation against an RGB detection model, and a diameter-stratified evaluation reveals how trunk segmentation quality varies with tree size. Beyond segmentation, the co-registered multi-modal data and RTK-GNSS-aided reference positioning support research in mapping, localization, and sensor fusion under canopy. The dataset and annotation tools are publicly available.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the Viking Hill Dataset, a multi-sensor collection (high-resolution FMCW imaging radar, lidar, RGB camera, IMU, RTK-GNSS) recorded by a mobile robot over two sessions with contrasting vegetation states in a forest. It supplies 3D cuboid annotations (including per-tree diameters) that serve as shared semantic labels across modalities and reports baseline semantic segmentation results on radar and lidar point clouds using MinkowskiUNet. Radar is stated to achieve IoU scores competitive with lidar on dominant classes (ground 91%, canopy 86%) but lower on tree trunks (56% vs. 74%), with additional cross-modality trunk analysis against an RGB detector and diameter-stratified evaluation. The dataset, annotations, and tools are released publicly to support mapping, localization, and fusion research under canopy.
Significance. If the shared 3D cuboid labels prove reliable, the release supplies a needed multi-modal forest benchmark that includes 4D imaging radar, a modality whose occlusion and weather resilience is of growing interest. The two-session design, diameter estimates, and public baselines enable direct comparison of sensor performance on the same scenes and support downstream work on sensor fusion and robust perception.
major comments (1)
- [Abstract] Abstract: the headline IoU comparisons (radar ground 91%/canopy 86%/trunk 56% vs. lidar trunk 74%) and the claim of radar competitiveness rest on the assumption that the 3D cuboid annotations supply accurate, modality-agnostic semantic labels. No annotation protocol, inter-annotator agreement statistics, or validation against independent measurements (e.g., manual diameter checks or lidar-only vs. camera-only consistency) is described; if cuboids were drawn primarily from one modality and projected, label noise on fine structures could systematically favor lidar and invalidate the cross-modality analysis.
minor comments (1)
- [Abstract] Abstract: the baseline method is named 'MinkowskiUNet' without citation, training details, or hyper-parameter settings, making the reported IoU numbers difficult to reproduce from the given information alone.
Simulated Author's Rebuttal
We thank the referee for the constructive review and the recognition of the dataset's potential value for multi-modal forest perception research. The major comment correctly identifies that the manuscript does not describe the annotation protocol, inter-annotator statistics, or independent validation of the 3D cuboids. We address this point below and will revise the paper accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline IoU comparisons (radar ground 91%/canopy 86%/trunk 56% vs. lidar trunk 74%) and the claim of radar competitiveness rest on the assumption that the 3D cuboid annotations supply accurate, modality-agnostic semantic labels. No annotation protocol, inter-annotator agreement statistics, or validation against independent measurements (e.g., manual diameter checks or lidar-only vs. camera-only consistency) is described; if cuboids were drawn primarily from one modality and projected, label noise on fine structures could systematically favor lidar and invalidate the cross-modality analysis.
Authors: We agree that the absence of an explicit annotation protocol description weakens the cross-modality claims. The cuboids were generated by projecting 3D points from the lidar scans into the camera images for visual verification and then fitting cuboids with diameter estimates taken directly from the lidar data; however, no formal inter-annotator agreement or independent field validation (such as manual caliper measurements) is reported. In the revised manuscript we will add a dedicated subsection under Data Annotation that details the labeling workflow, the tools used, the number of annotators, any consistency checks performed, and the acknowledged limitations for fine structures such as trunks. This addition will allow readers to assess the reliability of the shared labels and the validity of the reported IoU comparisons. revision: yes
Circularity Check
No circularity; dataset release with standard baselines
full rationale
This is a data-release paper introducing the Viking Hill multi-sensor forest dataset with 3D cuboid annotations and reporting baseline semantic segmentation results using the off-the-shelf MinkowskiUNet model. No derivations, equations, predictions, or fitted parameters are presented that could reduce to the inputs by construction. The IoU numbers are direct outputs of applying a public segmentation network to the released point clouds; they are not claimed as novel theoretical results. No self-citation chains, uniqueness theorems, or ansatzes are invoked to support core claims. The work is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Forestry applications of UAVs in Europe: a review,
C. Torresan, A. Berton, F. Carotenuto, S. F. Di Gennaro, B. Gioli, A. Matese, F. Miglietta, C. Vagnoli, A. Zaldei, and L. Wallace, “Forestry applications of UAVs in Europe: a review,”International Journal of Remote Sensing, vol. 38, no. 8-10, pp. 2427–2447, May 2017. [Online]. Available: https: //www.tandfonline.com/doi/full/10.1080/01431161.2016.1252477
-
[2]
Advances in Forest Robotics: A State-of-the-Art Survey,
L. F. P. Oliveira, A. P. Moreira, and M. F. Silva, “Advances in Forest Robotics: A State-of-the-Art Survey,”Robotics, vol. 10, no. 2, p. 53, Jun. 2021, publisher: Multidisciplinary Digital Publishing Institute. [Online]. Available: https://www.mdpi.com/2218-6581/10/2/53
2021
-
[3]
Online Tree Reconstruction and Forest Inventory on a Mobile Robotic System,
L. Freißmuth, M. Mattamala, N. Chebrolu, S. Schaefer, S. Leutenegger, and M. F. Fallon, “Online Tree Reconstruction and Forest Inventory on a Mobile Robotic System,” inIEEE/RSJ International Conference 27 on Intelligent Robots and Systems (IROS). Abu Dhabi, United Arab Emirates: IEEE, 2024, pp. 11 765–11 772. [Online]. Available: https://ieeexplore.ieee.o...
arXiv 2024
-
[4]
Robotics in Forest Inventories: SPOT’s First Steps,
G. Chirici, F. Giannetti, G. D’Amico, E. Vangi, S. Francini, C. Borghi, P. Corona, and D. Travaglini, “Robotics in Forest Inventories: SPOT’s First Steps,”Forests, vol. 14, no. 11, p. 2170, Oct. 2023. [Online]. Available: https://www.mdpi.com/1999-4907/14/11/2170
2023
-
[5]
P. La Hera, O. Mendoza-Trejo, and O. Lindroos, “Exploring the feasibility of autonomous forestry operations: Results from the first experimental unmanned machine,”Journal of Field Robotics, vol. 41, no. 4, pp. 942–965, 2024. [Online]. Available: https://onlinelibrary.wiley.com/doi/full/10.1002/rob.22300
-
[6]
V. S. Rajendran, B. Debnath, S. Mghames, W. Mandil, S. Parsa, S. Parsons, and A. Ghalamzan-E, “Towards autonomous selective harvesting: A review of robot perception, robot design, motion planning and control,”Journal of Field Robotics, vol. 41, no. 7, pp. 2247–2279, 2024. [Online]. Available: https://onlinelibrary.wiley.com/ doi/full/10.1002/rob.22230
-
[7]
UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation,
J.-M. Fortin, O. Gamache, W. Fecteau, E. Daum, W. Larriv´ ee-Hardy, F. Pomerleau, and P. Gigu` ere, “UAV-Assisted Self-Supervised Terrain Awareness for Off-Road Navigation,” in2025 IEEE International Conference on Robotics and Automation (ICRA), May 2025, pp. 1–7. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/ 11128050
2025
-
[8]
Topological Mapping for Traversability-Aware Long- Range Navigation in Off-Road Terrain,
J.-F. Tremblay, J. Alhosh, L. Petit, F. Lotfi, L. Landauro, and D. Meger, “Topological Mapping for Traversability-Aware Long- Range Navigation in Off-Road Terrain,” in2025 IEEE International Conference on Robotics and Automation (ICRA), May 2025, pp. 14 850–14 856. [Online]. Available: https://ieeexplore.ieee.org/ document/11128536
arXiv 2025
-
[9]
Kilometer- scale autonomous navigation in subarctic forests: challenges and lessons learned,
D. Baril, S.-P. Deschˆ enes, O. Gamache, M. Vaidis, D. LaRocque, J. Laconte, V. Kubelka, P. Gigu` ere, and F. Pomerleau, “Kilometer- scale autonomous navigation in subarctic forests: challenges and lessons learned,”Field Robotics, vol. 2, pp. 1628–1660, 2021. [Online]. Available: https://arxiv.org/pdf/2111.13981.pdf
arXiv 2021
-
[10]
DigiForests: A Longitudinal LiDAR Dataset for Forestry Robotics,
M. V. Malladi, N. Chebrolu, I. Scacchetti, L. Lobefaro, T. Guadagnino, B. Casseau, H. Oh, L. Freißmuth, M. Karppinen, J. Schweier, S. Leutenegger, J. Behley, C. Stachniss, and M. Fallon, “DigiForests: A Longitudinal LiDAR Dataset for Forestry Robotics,” inProc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2025. 28
2025
-
[11]
Obstacle Detection in Foliage with Ladar and Radar,
L. Matthies, C. Bergh, A. Castano, J. Macedo, and R. Man- duchi, “Obstacle Detection in Foliage with Ladar and Radar,” in Robotics Research. The Eleventh International Symposium, P. Dario and R. Chatila, Eds. Berlin, Heidelberg: Springer, 2005, pp. 291–300
2005
-
[12]
Radar Teach and Repeat: Architecture and Initial Field Testing,
X. Qiao, A. Krawciw, S. Lilge, and T. D. Barfoot, “Radar Teach and Repeat: Architecture and Initial Field Testing,” in 2025 IEEE International Conference on Robotics and Automation (ICRA), May 2025, pp. 13 021–13 027. [Online]. Available: https: //ieeexplore.ieee.org/abstract/document/11128412
arXiv 2025
-
[13]
RADIATE: A Radar Dataset for Automotive Perception in Bad Weather,
M. Sheeny, E. De Pellegrin, S. Mukherjee, A. Ahrabian, S. Wang, and A. Wallace, “RADIATE: A Radar Dataset for Automotive Perception in Bad Weather,”2021 IEEE International Conference on Robotics and Automation (ICRA), pp. 1–7, May 2021, conference Name: 2021 IEEE International Conference on Robotics and Automation (ICRA) ISBN: 9781728190778 Place: Xi’an, ...
arXiv 2021
-
[14]
Human Detection from 4D Radar Data in Low-Visibility Field Conditions,
M. Skog, O. Kotlyar, V. Kubelka, and M. Magnusson, “Human Detection from 4D Radar Data in Low-Visibility Field Conditions,” Apr. 2024, arXiv:2404.05307 [cs]. [Online]. Available: http://arxiv. org/abs/2404.05307
Pith/arXiv arXiv 2024
-
[15]
Xtonomy – autonomy everywhere,
Xtonomy, “Xtonomy – autonomy everywhere,” 2026, accessed: 2026-06-10. [Online]. Available: https://www.xtonomy.ai/
2026
-
[16]
A New Wave in Robotics: Survey on Recent MmWave Radar Applications in Robotics,
K. Harlow, H. Jang, T. D. Barfoot, A. Kim, and C. Heckman, “A New Wave in Robotics: Survey on Recent MmWave Radar Applications in Robotics,”IEEE Transactions on Robotics, vol. 40, pp. 4544–4560, 2024. [Online]. Available: https://ieeexplore.ieee.org/ document/10683889
arXiv 2024
-
[17]
Imaging radar for navigation and surveillance on an autonomous un- manned ground vehicle capable of detecting obstacles obscured by veg- etation,
D. Gusland, B. Torvik, E. Finden, F. Gulbrandsen, and R. Smestad, “Imaging radar for navigation and surveillance on an autonomous un- manned ground vehicle capable of detecting obstacles obscured by veg- etation,” in2019 IEEE Radar Conference, RadarConf 2019, 2019
2019
-
[18]
The GOOSE Dataset for Perception in Unstructured Environments,
P. Mortimer, R. Hagmanns, M. Granero, T. Luettel, J. Petereit, and H.-J. Wuensche, “The GOOSE Dataset for Perception in Unstructured Environments,” in2024 IEEE International Conference on Robotics and Automation (ICRA), May 2024, pp. 14 838–14 844. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/10611298
arXiv 2024
-
[19]
RELLIS- 3D Dataset: Data, Benchmarks and Analysis,
P. Jiang, P. Osteen, M. Wigness, and S. Saripalli, “RELLIS- 3D Dataset: Data, Benchmarks and Analysis,” in2021 IEEE International Conference on Robotics and Automation (ICRA), 29 May 2021, pp. 1110–1116, iSSN: 2577-087X. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/9561251
arXiv 2021
-
[20]
Tree detec- tion and diameter estimation based on deep learning,
V. Grondin, J.-M. Fortin, F. Pomerleau, and P. Gigu` ere, “Tree detec- tion and diameter estimation based on deep learning,”Forestry: An International Journal of Forest Research, 10 2022
2022
-
[21]
OORD: The Oxford Offroad Radar Dataset,
M. Gadd, D. De Martini, O. Bartlett, P. Murcutt, M. Towlson, M. Widojo, V. Mu¸ sat, L. Robinson, E. Panagiotaki, G. Pramatarov, M. Alexander K¨ uhn, L. Marchegiani, P. Newman, and L. Kunze, “OORD: The Oxford Offroad Radar Dataset,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 11, pp. 18 779–18 790, Nov. 2024. [Online]. Available: h...
arXiv 2024
-
[22]
The Oxford Radar RobotCar Dataset: A Radar Extension to the Oxford RobotCar Dataset,
D. Barnes, M. Gadd, P. Murcutt, P. Newman, and I. Posner, “The Oxford Radar RobotCar Dataset: A Radar Extension to the Oxford RobotCar Dataset,” in2020 IEEE International Conference on Robotics and Automation (ICRA), May 2020, pp. 6433–6438, iSSN: 2577-087X. [Online]. Available: https://ieeexplore.ieee.org/document/9196884
arXiv 2020
-
[23]
MulRan: Multimodal Range Dataset for Urban Place Recognition,
G. Kim, Y. S. Park, Y. Cho, J. Jeong, and A. Kim, “MulRan: Multimodal Range Dataset for Urban Place Recognition,” in2020 IEEE International Conference on Robotics and Automation (ICRA), May 2020, pp. 6246–6253, iSSN: 2577-087X. [Online]. Available: https://ieeexplore.ieee.org/document/9197298
arXiv 2020
-
[24]
S. Li, Z. Hong, Y. Chen, L. Hu, and J. Qin, “Get It for Free: Radar Segmentation Without Expert Labels and Its Application in Odometry and Localization,”IEEE Robotics and Automation Letters, vol. 10, no. 3, pp. 2678–2685, Mar. 2025. [Online]. Available: https://ieeexplore.ieee.org/document/10857300
arXiv 2025
-
[25]
HeRCULES: Heterogeneous Radar Dataset in Complex Urban Environment for Multi-Session Radar SLAM,
H. Kim, M. Jung, C. Noh, S. Jung, H. Song, W. Yang, H. Jang, and A. Kim, “HeRCULES: Heterogeneous Radar Dataset in Complex Urban Environment for Multi-Session Radar SLAM,” in2025 IEEE International Conference on Robotics and Automation (ICRA), May 2025, pp. 4649–4656. [Online]. Available: https: //ieeexplore.ieee.org/document/11128678
arXiv 2025
-
[26]
J. Zhang, H. Zhuge, Z. Wu, G. Peng, M. Wen, Y. Liu, and D. Wang, “4DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale Environments based on Pose Graph Optimization,” in2023 IEEE International Conference on Robotics and Automation (ICRA), May 2023, pp. 8333–8340. [Online]. Available: https: //ieeexplore.ieee.org/abstract/document/10160670 30
arXiv 2023
-
[27]
MSC-RAD4R: ROS-Based Automotive Dataset With 4D Radar,
M. Choi, S. Yang, S. Han, Y. Lee, M. Lee, K. H. Choi, and K.-S. Kim, “MSC-RAD4R: ROS-Based Automotive Dataset With 4D Radar,”IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 7194–7201, Nov. 2023. [Online]. Available: https: //ieeexplore.ieee.org/document/10225273
arXiv 2023
-
[28]
Dual Radar: A Multi-modal Dataset with Dual 4D Radar for Autononous Driving,
X. Zhang, L. Wang, J. Chen, C. Fang, G. Yang, Y. Wang, L. Yang, Z. Song, L. Liu, X. Zhang, B. Xu, Z. Li, Q. Yang, J. Li, Z. Zhang, W. Wang, and S. S. Ge, “Dual Radar: A Multi-modal Dataset with Dual 4D Radar for Autononous Driving,”Sci Data, vol. 12, no. 1, p. 439, Mar. 2025, publisher: Nature Publishing Group. [Online]. Available: https://www.nature.com/...
2025
-
[29]
K-Radar: 4D Radar Object Detection for Autonomous Driving in Various Weather Conditions,
D.-H. Paek, S.-H. Kong, and K. T. Wijaya, “K-Radar: 4D Radar Object Detection for Autonomous Driving in Various Weather Conditions,” Jun. 2022. [Online]. Available: https: //openreview.net/forum?id=W bsDmzwaZ7
2022
-
[30]
Multi-Class Road User Detection With 3+1D Radar in the View-of-Delft Dataset,
A. Palffy, E. Pool, S. Baratam, J. F. P. Kooij, and D. M. Gavrila, “Multi-Class Road User Detection With 3+1D Radar in the View-of-Delft Dataset,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4961–4968, Apr. 2022. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/9699098
arXiv 2022
-
[31]
TJ4DRadSet: A 4D Radar Dataset for Autonomous Driving,
L. Zheng, Z. Ma, X. Zhu, B. Tan, S. Li, K. Long, W. Sun, S. Chen, L. Zhang, M. Wan, L. Huang, and J. Bai, “TJ4DRadSet: A 4D Radar Dataset for Autonomous Driving,” in2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Oct. 2022, pp. 493–498. [Online]. Available: https: //ieeexplore.ieee.org/document/9922539
arXiv 2022
-
[32]
nuScenes: A Multimodal Dataset for Autonomous Driving,
H. Caesar, V. Bankiti, A. H. Lang, S. Vora, V. E. Liong, Q. Xu, A. Krishnan, Y. Pan, G. Baldan, and O. Beijbom, “nuScenes: A Multimodal Dataset for Autonomous Driving,” 2020, pp. 11 621–11 631. [Online]. Available: https://openaccess.thecvf.com/ content CVPR 2020/html/Caesar nuScenes A Multimodal Dataset for Autonomous Driving CVPR 2020 paper.html
2020
-
[33]
ColoRadar: The direct 3D millimeter wave radar dataset,
A. Kramer, K. Harlow, C. Williams, and C. Heckman, “ColoRadar: The direct 3D millimeter wave radar dataset,”The International Journal of Robotics Research, vol. 41, no. 4, pp. 351–360, Apr. 2022, publisher: SAGE Publications Ltd STM. [Online]. Available: https://doi.org/10.1177/02783649211068535
-
[34]
CARRADA Dataset: Camera and Automotive Radar with Range- 31 Angle- Doppler Annotations,
A. Ouaknine, A. Newson, J. Rebut, F. Tupin, and P. P´ erez, “CARRADA Dataset: Camera and Automotive Radar with Range- 31 Angle- Doppler Annotations,” in2020 25th International Conference on Pattern Recognition (ICPR), Jan. 2021, pp. 5068–5075, iSSN: 1051-4651. [Online]. Available: https://ieeexplore.ieee.org/document/ 9413181
2021
-
[35]
S. Yao, R. Guan, X. Huang, Z. Li, X. Sha, Y. Yue, E. G. Lim, H. Seo, K. L. Man, X. Zhu, and Y. Yue, “Radar-Camera Fusion for Object Detection and Semantic Segmentation in Autonomous Driving: A Comprehensive Review,”IEEE Transactions on Intelligent Vehicles, vol. 9, no. 1, pp. 2094–2128, Jan. 2024. [Online]. Available: https://ieeexplore.ieee.org/document/10225711
arXiv 2094
-
[36]
Forest Aboveground Biomass Estimation and Inventory: Evaluating Remote Sensing-Based Approaches,
M. N. Khan, Y. Tan, A. A. Gul, S. Abbas, and J. Wang, “Forest Aboveground Biomass Estimation and Inventory: Evaluating Remote Sensing-Based Approaches,”Forests, vol. 15, no. 6, p. 1055, Jun. 2024, publisher: Multidisciplinary Digital Publishing Institute. [Online]. Available: https://www.mdpi.com/1999-4907/15/6/1055
2024
-
[37]
Overview and Benchmark on Multi-Modal Lidar Point Cloud Registration for Forest Applications,
M. B. Campos, L. F. Castanheiro, D. Shah, Y. Wang, A. Kukko, and E. Puttonen, “Overview and Benchmark on Multi-Modal Lidar Point Cloud Registration for Forest Applications,”The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, vol. XLVIII-1-2024, pp. 43–50, May 2024, conference Name: ISPRS TC I Mid-term Symposi...
2024
-
[38]
Deep learning based 3D point cloud regression for estimating forest biomass,
S. Oehmcke, L. Li, J. C. Revenga, T. Nord-Larsen, K. Trepekli, F. Gieseke, and C. Igel, “Deep learning based 3D point cloud regression for estimating forest biomass,” inProceedings of the 30th International Conference on Advances in Geographic Information Systems, ser. SIGSPATIAL ’22. New York, NY, USA: Association for Computing Machinery, Nov. 2022, pp. ...
-
[39]
Automatic three-dimensional mapping for tree diameter measurements in inventory operations,
J.-F. Tremblay, M. B´ eland, R. Gagnon, F. Pomerleau, and P. Gigu` ere, “Automatic three-dimensional mapping for tree diameter measurements in inventory operations,”Journal of Field Robotics, vol. 37, no. 8, pp. 1328–1346, 2020, eprint: https://onlinelibrary.wiley.com/doi/pdf/10.1002/rob.21980. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/...
-
[40]
S. Puliti, G. Pearse, P. Surov´ y, L. Wallace, M. Hollaus, M. Wielgosz, and R. Astrup, “FOR-instance: a UAV laser scanning benchmark dataset for semantic and instance segmentation of 32 individual trees,” Sep. 2023, arXiv:2309.01279 [cs]. [Online]. Available: http://arxiv.org/abs/2309.01279
arXiv 2023
-
[41]
D. Cheng, F. Cladera, A. Prabhu, X. Liu, A. Zhu, P. C. Green, R. Ehsani, P. Chaudhari, and V. Kumar, “TreeScope: An Agricultural Robotics Dataset for LiDAR-Based Mapping of Trees in Forests and Orchards,” in2024 IEEE International Conference on Robotics and Automation (ICRA), May 2024, pp. 14 860–14 866. [Online]. Available: https://ieeexplore.ieee.org/ab...
arXiv 2024
-
[42]
WildScenes: A benchmark for 2D and 3D semantic segmentation in large-scale natural environments,
K. Vidanapathirana, J. Knights, S. Hausler, M. Cox, M. Ramezani, J. Jooste, E. Griffiths, S. Mohamed, S. Sridharan, C. Fookes, and P. Moghadam, “WildScenes: A benchmark for 2D and 3D semantic segmentation in large-scale natural environments,”The International Journal of Robotics Research, vol. 44, no. 4, pp. 532–549, Apr. 2025, publisher: SAGE Publication...
-
[43]
4d spatio-temporal convnets: Minkowski convolutional neural networks,
C. Choy, J. Gwak, and S. Savarese, “4d spatio-temporal convnets: Minkowski convolutional neural networks,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2019, pp. 3075–3084
2019
-
[44]
Microsoft COCO: Common Objects in Context,
T.-Y. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ramanan, P. Doll´ ar, and C. L. Zitnick, “Microsoft COCO: Common Objects in Context,” inComputer Vision – ECCV 2014, D. Fleet, T. Pajdla, B. Schiele, and T. Tuytelaars, Eds. Cham: Springer International Publishing, 2014, pp. 740–755
2014
-
[45]
Egoblur: Responsible innovation in aria,
N. Raina, G. Somasundaram, K. Zheng, S. Miglani, S. Saarinen, J. Meissner, M. Schwesinger, L. Pesqueira, I. Prasad, E. Miller, P. Gupta, M. Yan, R. Newcombe, C. Ren, and O. M. Parkhi, “Egoblur: Responsible innovation in aria,” 2023
2023
-
[46]
Comparing ICP Variants on Real-World Data Sets,
F. Pomerleau, F. Colas, R. Siegwart, and S. Magnenat, “Comparing ICP Variants on Real-World Data Sets,”Autonomous Robots, vol. 34, no. 3, pp. 133–148, Feb. 2013
2013
-
[47]
K. Koide, J. Miura, and E. Menegatti, “A portable three- dimensional LIDAR-based system for long-term and wide-area people behavior measurement,”International Journal of Advanced Robotic Systems, vol. 16, no. 2, p. 1729881419841532, Mar. 2019, publisher: SAGE Publications. [Online]. Available: https: //doi.org/10.1177/1729881419841532 33
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.