TaCauchy: An Extensible FEM Framework for Vision-Based Tactile Simulation
Pith reviewed 2026-06-26 17:20 UTC · model grok-4.3
The pith
TaCauchy computes Cauchy stress tensors directly from hyperelastic laws inside an extensible FEM framework integrated with Isaac Sim.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
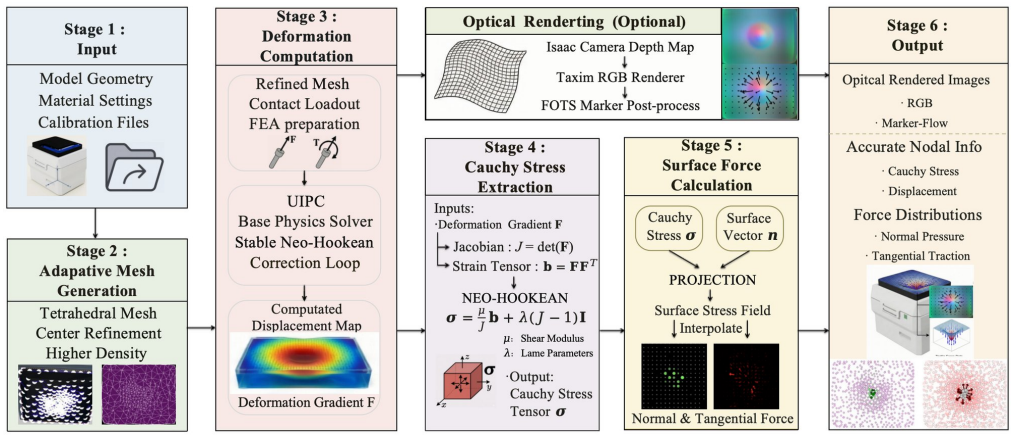
TaCauchy is an extensible FEM framework built on the Unified Incremental Potential Contact solver that directly computes Cauchy stress tensors from hyperelastic constitutive laws and projects them onto contact surfaces to obtain traction forces and pressure distributions, providing mechanical ground truth from first principles rather than empirical estimation.
What carries the argument
Direct computation of Cauchy stress tensors from hyperelastic constitutive laws using the UIPC solver, followed by projection onto contact surfaces to extract traction and pressure.
If this is right
- Supplies accurate, physically grounded force supervision signals for reinforcement learning in robotic manipulation.
- Enables rapid integration of multiple vision-based tactile sensors through a modular interface with minimal setup.
- Supports parallel simulation at 555 FPS aggregate throughput across 60 environments with stress extraction under 1 ms overhead.
- Provides automatic geometry-aware mesh refinement for handling complex sensor geometries.
Where Pith is reading between the lines
- The same stress-projection approach could be applied to simulate other soft-contact scenarios in robotics beyond tactile sensing.
- The modular sensor interface opens a route to virtual prototyping of new tactile sensor designs before hardware fabrication.
- High parallel throughput makes the framework suitable for generating large-scale datasets for training contact-rich policies.
Load-bearing premise
The hyperelastic constitutive laws together with the UIPC solver accurately capture the mechanics and contact behavior of real tactile sensors.
What would settle it
A side-by-side test in which simulated pressure distributions or force responses diverge measurably from physical sensor readings for the same contact geometry and forces outside the 1.2556 N to 4.7332 N interval.
Figures



read the original abstract
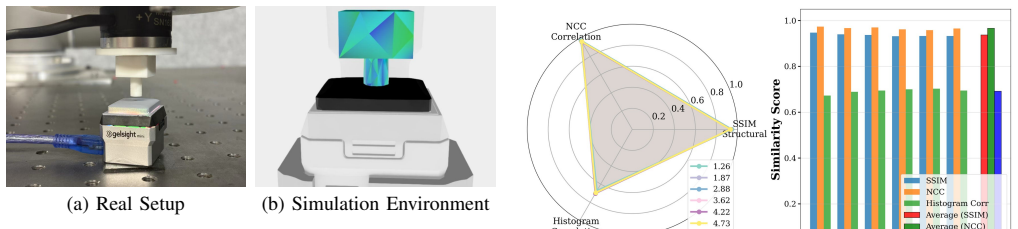
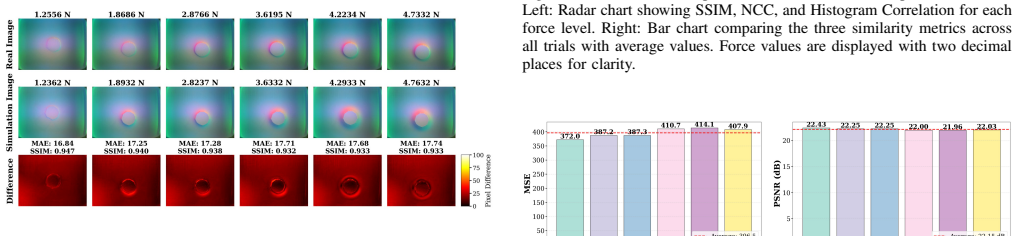
Vision-based tactile sensors require high-fidelity simulation for reinforcement learning, yet existing approaches struggle to provide accurate mechanical stress fields within GPU-accelerated robotics platforms. We present TaCauchy, an extensible Finite Element Method (FEM) framework that integrates rigorous physics-based force computation into Isaac Sim. Built on the Unified Incremental Potential Contact (UIPC) solver, TaCauchy directly computes Cauchy stress tensors from hyperelastic constitutive laws and projects them onto contact surfaces to obtain traction forces and pressure distributions, providing mechanical ground truth from first principles rather than empirical estimation. Our framework features automatic mesh generation with geometry-aware adaptive refinement and a modular sensor interface enabling rapid integration of diverse sensors (GelSight Mini, DIGIT, 9DTact) with minimal configuration. Performance benchmarks demonstrate 33.40 FPS for single environments and 555 FPS aggregate throughput across 60 parallel environments, with stress extraction overhead under 1 ms. Physical validation experiments show strong agreement between simulated and real tactile responses across force ranges from 1.2556 N to 4.7332 N, achieving SSIM above 0.93, confirming the framework's capability to provide accurate, physically-grounded force supervision for downstream robotic manipulation tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents TaCauchy, an extensible FEM framework for vision-based tactile sensor simulation inside Isaac Sim. Built on the UIPC solver, it computes Cauchy stress tensors directly from hyperelastic constitutive laws, projects them onto contact surfaces to yield traction forces and pressure distributions as mechanical ground truth, includes automatic adaptive meshing, and provides a modular interface for sensors such as GelSight Mini, DIGIT and 9DTact. Reported performance is 33.40 FPS per environment and 555 FPS aggregate across 60 parallel environments with <1 ms stress-extraction overhead; physical validation claims SSIM > 0.93 between simulated and real tactile images for applied forces in the interval 1.2556–4.7332 N.
Significance. If the physical fidelity claim holds beyond the reported narrow force band, the framework would supply a useful, GPU-accelerated source of first-principles tactile supervision for robotic manipulation and RL, replacing purely empirical image-to-force mappings with explicit stress fields.
major comments (1)
- [Abstract] Abstract (validation paragraph): the claim that the framework supplies “mechanical ground truth from first principles” rests on the accuracy of the chosen hyperelastic laws and UIPC solver for real gel behavior, yet the only supporting evidence is SSIM > 0.93 on tactile images inside a 3.48 N window (1.2556–4.7332 N). No direct force or pressure transducer measurements, no comparison against alternative constitutive models, and no experiments outside this interval are described; this gap is load-bearing for the central contribution.
minor comments (2)
- [Abstract] Abstract: hardware platform, GPU model and number of CPU cores should be stated for the reported FPS numbers to allow reproduction.
- [Abstract] Abstract: the precise definition of the SSIM metric (image domain, stress-field domain, or both) and the number of trials per force level should be clarified.
Simulated Author's Rebuttal
We thank the referee for the careful review and for identifying the need to strengthen the presentation of our validation results. We respond to the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract (validation paragraph): the claim that the framework supplies “mechanical ground truth from first principles” rests on the accuracy of the chosen hyperelastic laws and UIPC solver for real gel behavior, yet the only supporting evidence is SSIM > 0.93 on tactile images inside a 3.48 N window (1.2556–4.7332 N). No direct force or pressure transducer measurements, no comparison against alternative constitutive models, and no experiments outside this interval are described; this gap is load-bearing for the central contribution.
Authors: We agree that the validation evidence is indirect and range-limited. SSIM on tactile images is used because these images are the direct observable produced by the sensor and are governed by the underlying stress and deformation fields; however, this does not substitute for direct transducer data or cross-model comparisons. The hyperelastic models are standard for elastomer gels and UIPC has prior validation for contact, but these facts do not fully close the gap noted. We will revise the abstract to qualify the “mechanical ground truth from first principles” phrasing, explicitly state that validation is via image similarity within the tested force interval, and add a short limitations paragraph. No new physical experiments or model comparisons will be added in the revision. revision: partial
Circularity Check
No circularity: derivation rests on external UIPC solver and standard hyperelastic laws
full rationale
The paper's core claim is that TaCauchy computes Cauchy stress tensors directly from hyperelastic constitutive laws via the UIPC solver and projects them to obtain traction/pressure. UIPC is an established external solver (no author overlap indicated), and hyperelastic laws are standard constitutive models, not fitted or defined within this work. No equations reduce a prediction to a fitted input by construction, no self-citation is load-bearing for the central mechanics, and validation (SSIM > 0.93) is presented as empirical confirmation rather than part of the derivation chain. The framework is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The UIPC solver can be used to compute accurate Cauchy stress tensors for hyperelastic materials in contact scenarios
- domain assumption Hyperelastic constitutive laws are appropriate for modeling the tactile sensor materials
Reference graph
Works this paper leans on
-
[1]
GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force,
W. Yuan, S. Dong, and E. H. Adelson, “GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force,”Sensors, vol. 17, no. 12, p. 2762, 2017
2017
-
[2]
DIGIT: A Novel Design for a Low-Cost Compact High- Resolution Tactile Sensor with Application to In-Hand Manipulation,
M. Lambeta, P.-W. Chou, S. Tian, B. Yang, B. Maloon, V . R. Most, D. Stroud, R. Santos, A. Byagowi, G. Kammerer, D. Jayaraman, and R. Calandra, “DIGIT: A Novel Design for a Low-Cost Compact High- Resolution Tactile Sensor with Application to In-Hand Manipulation,” IEEE Robotics and Automation Letters, vol. 5, no. 3, pp. 3838–3845, 2020
2020
-
[3]
Biomimetic Multimodal Tactile Sensing Enables Human- like Robotic Perception,
S. Li, T. Wu, J. Xu, Y . Huang, Z. Zhang, H. Zhao, Q. Xu, Z. Wang, L. Ye, Y . Yang, C. Lyu, S. Mu, X. Wang, Z. Xie, C. Wu, X. Yu, and W. Ding, “Biomimetic Multimodal Tactile Sensing Enables Human- like Robotic Perception,”Nature Sensors, vol. 1, pp. 52–62, 2026
2026
-
[4]
M3Tac: A Multispectral Multimodal Visuotactile Sensor With Beyond-Human Sensory Capabilities,
S. Li, H. Yu, G. Pan, H. Tang, J. Zhang, L. Ye, X. Zhang, and W. Ding, “M3Tac: A Multispectral Multimodal Visuotactile Sensor With Beyond-Human Sensory Capabilities,”IEEE Transactions on Robotics, vol. 40, pp. 4484–4503, 2024
2024
-
[5]
S. Li, C. Guo, J. Gong, C. Liang, W. Ding, and W. Ding, “SandWorm: Event-based Visuotactile Perception with Active Vibration for Screw- Actuated Robot in Granular Media,”arXiv preprint arXiv:2601.14128, 2025
arXiv 2025
-
[6]
X. Li, Y . Xie, H. Liu, W. Hou, G. Chen, S. Li, and W. Ding, “Master micro residual correction with adaptive tactile fusion and force-mixed control for contact-rich manipulation,”arXiv preprint arXiv:2603.15152, 2026
arXiv 2026
-
[7]
Learning human-intention priors from large-scale human demonstrations for robotic manipulation,
Y . Xie, Y . Wang, G. Chen, J. Liu, Y . Sun, and W. Ding, “Learning human-intention priors from large-scale human demonstrations for robotic manipulation,”arXiv preprint arXiv:2604.24681, 2026
Pith/arXiv arXiv 2026
-
[8]
TacEX: GelSight Tactile Simulation in Isaac Sim – Combining Soft-Body and Visuotactile Simulators,
D. H. Nguyen, T. Schneider, G. Duret, A. Kshirsagar, B. Belousov, and J. Peters, “TacEX: GelSight Tactile Simulation in Isaac Sim – Combining Soft-Body and Visuotactile Simulators,” in8th Conference on Robot Learning (CoRL) Workshop on Learning Robot Fine and Dexterous Manipulation, 2024
2024
-
[9]
TacIPC: Intersection- and Inversion-free FEM-based Elastomer Simulation For Optical Tactile Sensors,
W. Du, W. Xu, J. Ren, Z. Yu, and C. Lu, “TacIPC: Intersection- and Inversion-free FEM-based Elastomer Simulation For Optical Tactile Sensors,”IEEE Robotics and Automation Letters, 2024
2024
-
[10]
B. Chen, W. Wan, T. Chen, X. Guo, C. Xu, Y . Qiet al., “Uni- VTAC: A Unified Simulation Platform for Visuo-Tactile Manipula- tion Data Generation, Learning, and Benchmarking,”arXiv preprint arXiv:2602.10093, 2026
arXiv 2026
-
[11]
Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation,
Y . Li, W. Du, C. Yu, P. Li, Z. Zhao, C. Jiang, T. Liu, S. Huang, and Y . Zhu, “Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation,”Advances in Neural Information Processing Systems (NeurIPS), 2025
2025
-
[12]
DIFFTACTILE: A Physics- based Differentiable Tactile Simulator for Contact-rich Robotic Ma- nipulation,
Z. Si, S. Dong, J. Xu, W. Yuanet al., “DIFFTACTILE: A Physics- based Differentiable Tactile Simulator for Contact-rich Robotic Ma- nipulation,” inInternational Conference on Learning Representations (ICLR), 2024
2024
-
[13]
TacSL: A Library for Visuotactile Sensor Simulation and Learning,
I. Akinola, J. Xu, J. Carius, D. Fox, and Y . Narang, “TacSL: A Library for Visuotactile Sensor Simulation and Learning,”IEEE Transactions on Robotics (T-RO), 2025
2025
-
[14]
TACTO: A fast, flexible, and open-source simulator for high- resolution vision-based tactile sensors,
S. Wang, M. Lambeta, P.-W. Chou, R. Alvarez-Melis, and R. Calan- dra, “TACTO: A fast, flexible, and open-source simulator for high- resolution vision-based tactile sensors,”IEEE Robotics and Automa- tion Letters, vol. 7, no. 2, pp. 3930–3937, 2022
2022
-
[15]
Taxim: An example-based simulation model for gelsight tactile sensors,
Z. Si and W. Yuan, “Taxim: An example-based simulation model for gelsight tactile sensors,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2361–2368, 2022
2022
-
[16]
FOTS: A Fast Optical Tactile Simulator for Sim2Real Learning of Tactile-motor Robot Manipulation Skills,
Y . Zhao, K. Qian, B. Duan, and S. Luo, “FOTS: A Fast Optical Tactile Simulator for Sim2Real Learning of Tactile-motor Robot Manipulation Skills,”IEEE Robotics and Automation Letters, vol. 9, no. 6, pp. 5130– 5137, 2024
2024
-
[17]
M. E. Gurtin,An Introduction to Continuum Mechanics, ser. Math- ematics in Science and Engineering. New York: Academic Press, 1981, vol. 158
1981
-
[18]
Dense Tactile Force Distribution Estimation using GelSlim and inverse FEM,
D. Ma, E. Donlon, S. Dong, and A. Rodriguez, “Dense Tactile Force Distribution Estimation using GelSlim and inverse FEM,”arXiv preprint arXiv:1810.04621, 2019
Pith/arXiv arXiv 2019
-
[19]
Binding Touch to Everything: Learning Unified Multimodal Tactile Representations,
F. Yang, C. Feng, Z. Chen, H. Park, D. Wang, Y . Dou, Z. Zeng, X. Chen, R. Gangopadhyay, A. Owens, and A. Wong, “Binding Touch to Everything: Learning Unified Multimodal Tactile Representations,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 26 340–26 353
2024
-
[20]
AnyTouch: Learning Unified Static-Dynamic Rep- resentation across Multiple Visuo-tactile Sensors,
C. Fenget al., “AnyTouch: Learning Unified Static-Dynamic Rep- resentation across Multiple Visuo-tactile Sensors,” inInternational Conference on Learning Representations (ICLR), 2025
2025
-
[21]
Universal visuo-tactile video understanding for embodied interac- tion,
Y . Xie, M. Li, S. Li, X. Li, G. Chen, F. Ma, F. Yu, and W. Ding, “Universal visuo-tactile video understanding for embodied interac- tion,”Advances in Neural Information Processing Systems, vol. 38, pp. 127 864–127 883, 2026
2026
-
[22]
Fast Tetra- hedral Meshing in the Wild,
Y . Hu, T. Schneider, B. Wang, D. Zorin, and D. Panozzo, “Fast Tetra- hedral Meshing in the Wild,”ACM Transactions on Graphics (TOG), vol. 39, no. 4, pp. 117:1–117:18, 2020, presented at SIGGRAPH 2020
2020
-
[23]
L. R. G. Treloar,The Physics of Rubber Elasticity, 3rd ed. Oxford, UK: Oxford University Press, 1975
1975
-
[24]
9DTact: A Compact Vision-Based Tactile Sensor for Accurate 3D Shape Reconstruction and Generalizable 6D Force Estimation,
C. Lin, H. Zhang, J. Xu, L. Wu, and H. Xu, “9DTact: A Compact Vision-Based Tactile Sensor for Accurate 3D Shape Reconstruction and Generalizable 6D Force Estimation,”IEEE Robotics and Automa- tion Letters, vol. 9, no. 2, pp. 923–930, 2024
2024
-
[25]
Stable Neo-Hookean Flesh Simulation,
B. Smith, F. De Goes, and T. Kim, “Stable Neo-Hookean Flesh Simulation,”ACM Transactions on Graphics (TOG), vol. 37, no. 2, pp. 1–15, 2018
2018
-
[26]
Incremental Potential Contact: Intersection- and Inversion-free, Large-Deformation Dynamics,
M. Li, Z. Ferguson, T. Schneider, T. Langlois, D. Zorin, D. Panozzo, C. Jiang, and D. M. Kaufman, “Incremental Potential Contact: Intersection- and Inversion-free, Large-Deformation Dynamics,”ACM Transactions on Graphics (TOG), vol. 39, no. 4, pp. 49:1–49:20, 2020, presented at SIGGRAPH 2020
2020
-
[27]
NVIDIA Isaac Sim: A Robotics Simulation Platform,
NVIDIA Corporation, “NVIDIA Isaac Sim: A Robotics Simulation Platform,” https://developer.nvidia.com/isaac-sim, 2023, version 5.1.0
2023
-
[28]
Orbit: A Unified Simulation Framework for Interactive Robot Learning Environments,
M. Mittal, C. Yu, Q. Yu, J. Liu, N. Rudin, D. Hoeller, J. L. Yuan, R. Singh, Y . Guo, H. Mazhar, A. Mandlekar, B. Babich, G. State, M. Hutter, and A. Garg, “Orbit: A Unified Simulation Framework for Interactive Robot Learning Environments,”IEEE Robotics and Automation Letters, vol. 8, no. 6, pp. 3740–3747, 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.