Provable Benefits of RLVR over SFT for Reasoning Models: Learning to Backtrack Efficiently
Pith reviewed 2026-06-26 09:06 UTC · model grok-4.3
The pith
RLVR learns to backtrack efficiently from dead ends using only outcome rewards, while SFT on shortest golden paths cannot, producing an exponential gap in inference compute.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By modeling chain-of-thought reasoning as a pathfinding problem on graphs, SFT trained on golden shortest paths without negative examples fails to learn how to efficiently backtrack. In contrast, an RLVR-trained model can learn how to efficiently backtrack from dead ends using only outcome reward. This leads to an exponential separation in inference-time compute between the two methods, and demonstrates that RLVR leads the model to learn the location of difficult decisions in a reasoning chain, ultimately allowing for better allocation of inference-time compute. Finally, the reasoning traces of an RLVR model can be distilled to train a base model to backtrack efficiently as well.
What carries the argument
Graph pathfinding model of CoT reasoning, where backtracking requires recognizing dead ends; SFT supplies only positive shortest paths while RLVR supplies outcome reward that permits learning from failed paths.
If this is right
- RLVR models learn to identify difficult decision points within reasoning chains.
- This identification enables more effective allocation of inference-time compute.
- RLVR traces can be distilled to equip non-RL models with efficient backtracking.
- The exponential separation in required inference compute holds for complex reasoning tasks.
Where Pith is reading between the lines
- Adding explicit failure traces or negative examples to SFT data might narrow the gap with RLVR.
- The graph formulation suggests that reasoning benefits from explicit search-and-retract mechanisms.
- The same backtracking advantage may appear in other sequential decision domains beyond language.
- Empirical tests could measure backtracking frequency directly in RLVR versus SFT model outputs.
Load-bearing premise
Chain-of-thought reasoning behaves like pathfinding on a graph in which backtracking from dead ends is possible and useful.
What would settle it
A synthetic graph pathfinding experiment in which an SFT model trained solely on shortest paths backtracks from dead ends at rates comparable to an RLVR model, or a real reasoning benchmark showing no exponential inference-compute gap between the two training methods.
Figures



read the original abstract
Recent advances in large language models (LLMs) have demonstrated that reinforcement fine-tuning of pretrained base models can lead to significant gains in reasoning performance at inference time. In this work, we theoretically analyze why reinforcement fine-tuning induces better reasoning ability than purely supervised fine-tuning (SFT) methods. We model chain-of-thought (CoT) reasoning as a pathfinding problem on graphs and compare the popular method of reinforcement learning with verifiable rewards (RLVR) against traditional SFT. We prove that SFT, when trained on golden shortest paths without negative examples, fails to learn how to efficiently backtrack. In contrast, an RLVR-trained model can learn how to efficiently backtrack from dead ends using only outcome reward. This leads to an exponential separation in inference-time compute between the two methods, and demonstrates that RLVR leads the model to learn the location of difficult decisions in a reasoning chain, ultimately allowing for better allocation of inference-time compute. Finally, we show that the reasoning traces of an RLVR model can be distilled to train a base model to backtrack efficiently as well.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that by modeling CoT reasoning as pathfinding on graphs, SFT trained on golden shortest paths without negative examples cannot learn efficient backtracking, whereas RLVR can learn to backtrack using only outcome rewards, resulting in an exponential separation in inference-time compute. Additionally, RLVR reasoning traces can be distilled to enable efficient backtracking in base models.
Significance. If the results hold within the proposed model, this work provides a theoretical foundation for the observed benefits of RLVR over SFT in reasoning tasks by highlighting the role of learning backtracking and efficient allocation of compute at difficult decision points. The formal proofs and the distillation result are notable strengths that could guide future empirical and theoretical work on reasoning models.
major comments (1)
- [Modeling of CoT as graph pathfinding (as described in the abstract and introduction)] The exponential separation result depends critically on the graph pathfinding abstraction, where backtracking is an explicit action at dead ends. However, in autoregressive LLMs, reasoning is a single forward pass over tokens, and any backtracking must be realized through generated token sequences without an injected primitive. This raises a correctness-risk for the claim that the separation applies to real LLM reasoning; a concrete mapping or justification showing how the graph MDP encodes the token-level credit assignment problem is needed to support the practical implications.
minor comments (1)
- The abstract mentions proofs but the full derivation steps for the separation are not detailed in the provided summary; ensuring all assumptions (e.g., graph structure, reward definitions) are clearly stated would improve clarity.
Simulated Author's Rebuttal
We thank the referee for their insightful comments. We address the major comment below.
read point-by-point responses
-
Referee: [Modeling of CoT as graph pathfinding (as described in the abstract and introduction)] The exponential separation result depends critically on the graph pathfinding abstraction, where backtracking is an explicit action at dead ends. However, in autoregressive LLMs, reasoning is a single forward pass over tokens, and any backtracking must be realized through generated token sequences without an injected primitive. This raises a correctness-risk for the claim that the separation applies to real LLM reasoning; a concrete mapping or justification showing how the graph MDP encodes the token-level credit assignment problem is needed to support the practical implications.
Authors: We agree that an explicit mapping strengthens the link to autoregressive LLMs. Nodes in the graph correspond to token prefixes (partial reasoning traces), edges to next-token choices, and dead ends to prefixes that cannot yield a correct final answer. Backtracking is realized by the policy generating corrective tokens that recover from such prefixes. In the revised manuscript we will add a subsection in the preliminaries explicitly describing this correspondence and how the MDP encodes token-level credit assignment. This preserves the core separation result while clarifying applicability to real models. revision: yes
Circularity Check
Theoretical proof is self-contained; no circular reductions
full rationale
The paper derives an exponential separation between RLVR and SFT via a mathematical proof inside an explicit graph pathfinding model of CoT reasoning. No load-bearing step reduces by construction to fitted parameters, self-citations, or self-definitional inputs; the result follows directly from the stated assumptions about shortest paths, outcome rewards, and backtracking actions without renaming known results or smuggling ansatzes. The modeling choice is presented as an abstraction rather than derived from the target claim, leaving the derivation independent.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Chain-of-thought reasoning can be modeled as a pathfinding problem on graphs
Reference graph
Works this paper leans on
-
[1]
Scaling LLM Test-Time Compute Optimally can be More Effective than Scaling Model Parameters
URL https://openreview.net/forum? id=hJ2BCYGvFg. Snell, C., Lee, J., Xu, K., and Kumar, A. Scaling LLM test- time compute optimally can be more effective than scal- ing model parameters.arXiv preprint arXiv:2408.03314, 2024. Sutton, R. S., McAllester, D., Singh, S., and Mansour, Y . Policy gradient methods for reinforcement learning with function approxim...
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[2]
Reinforcement Learning for Reasoning in Large Language Models with One Training Example
URL https://proceedings.neurips. cc/paper_files/paper/1999/file/ 464d828b85b0bed98e80ade0a5c43b0f-Paper. pdf. Wang, Y ., Yang, Q., Zeng, Z., Ren, L., Liu, L., Peng, B., Cheng, H., He, X., Wang, K., Gao, J., Chen, W., Wang, S., Du, S. S., and Shen, Y . Reinforcement learning for reasoning in large language models with one training example, 2025. URL https:...
work page internal anchor Pith review Pith/arXiv arXiv 1999
-
[3]
Let Hf :=h x(ui,1,l →f) denote the hitting time of a fixed target x from any of the states whose head is the fork f (including the initial source states 0 →f); by symmetry they are all equal, hence why we consider a single value
-
[4]
That is, ˜g(s) :=E[τf] where τf := min{t≥0 :s 0 =s,head(s t) =f}
For state s not on the branch of x, we define ˜g(s)to be the expected time of hitting the fork, starting at state s. That is, ˜g(s) :=E[τf] where τf := min{t≥0 :s 0 =s,head(s t) =f} . In particular, this means that hx(s) = ˜g(s) +Hf , and we have the absorbing conditionh x(ui,1,l →f) = 0for branchinot equal to the branch of targetx. 17 Provable Benefits o...
-
[5]
both states are absorbing)
For state s on the branch of x, we define g(s) to be the expected time of hitting either f or x (e.g. both states are absorbing). That is,g(s) :=E[τ {f,x}]whereτ {f,x} := min{t≥0 :s 0 =s,head∈ {f, x}}
-
[6]
In particular, this means that hx(s) =g(s) +q(s)H f
For state s on the branch of x, we define q(s) to be the probability it hits f before x. In particular, this means that hx(s) =g(s) +q(s)H f . Lemma 7.Define the followingq-gaps: δj :=q(L − j )−q(L + j+1), ϵ j :=q(R − j−1)−q(R + j ) Then, it holds thatδ j >0andϵ j >0for allj. Proof. For δj, this follows intuitively from the fact that all paths from L+ j+1...
-
[7]
In other words, µs is the expected number of visits to statesduring a target branch attempt
When s is on the target branch, define µ(s) :=E hP t<τ{f,x} 1{st =s}|s 0 =L + 1 i . In other words, µs is the expected number of visits to statesduring a target branch attempt
-
[8]
In other words, ˜µs is the expected number of visits to statesduring a non-target branch attempt until it goes back tof
When s is not on the target branch, define ˜µ(s) :=E hP t<τf 1{st =s}|s 0 =L + 1 i . In other words, ˜µs is the expected number of visits to statesduring a non-target branch attempt until it goes back tof. Definition 3.Fix a target x, and define the success probability of hitting the target upon entering its branchpsucc before hittingf. That is, psucc :=P...
-
[9]
Ifsis on the same branch asx, then we haved x(s) = µ(s) psucc
-
[10]
Ifsis on a different branch fromx, then we haved x(s) = ˜µ(s) psucc . Proof. Note that the probability of success for each branch entry is psucc W , as one needs to choose the target branch with probability 1/W and then succeed with probability psucc. Hence, the total number of fork departures on expectation is W/psucc, so the expected number of entries i...
-
[11]
On a non-target branch, it holds thatd x(L+ j ) =d x(R− j ) =Dandd x(R+ j ) =d x(L− j ) =D·L
-
[12]
The hitting time from a fork state isH 0 :=H f(0) = (2W−1)D(1 +K(L+ 1)). 26 Provable Benefits of RLVR over SFT for Reasoning Models On a non-target branch, it holds at initialization (t= 0 ) that ˜µ(s) = 1for non-multiedge states and ˜µ(s) =Lfor aggregate multiedge states. That is,˜µ(L+ j ) = ˜µ(R− j ) = 1and˜µ(L− j ) = ˜µ(R+ j ) =L. For all1≤j≤K, it hold...
-
[13]
Upon entering a branchi, sincea j =c j = 1for allj, we reach thet i node inΘ(K)time
-
[14]
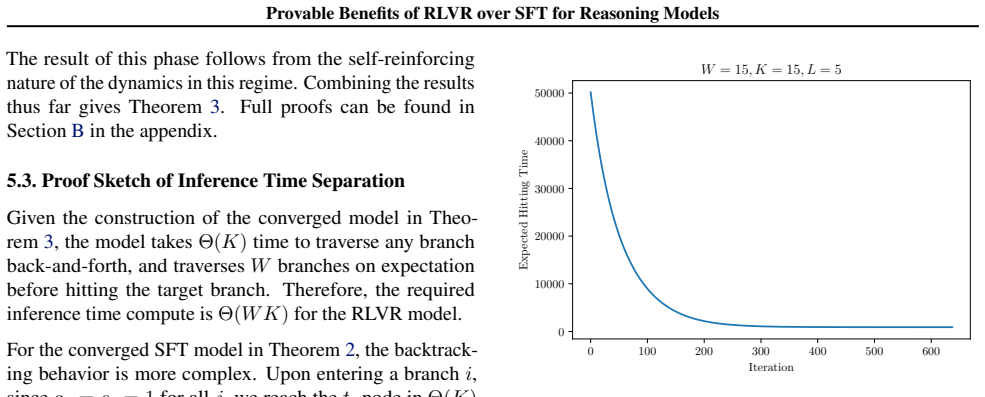
reached the state with headt i), letg i denote the expected time of first entry into R− K+1−i, and fi denote the expected time of first entry into L− K+1−i
When exiting the branch, starting from the stateR + K+1 (i.e. reached the state with headt i), letg i denote the expected time of first entry into R− K+1−i, and fi denote the expected time of first entry into L− K+1−i. Then, with the base case ofg 1 = 1, we have the following recursion: fi = L+ 1 L gi + (2i−1)· 1 L + 1, gi = (L+ 1)f i−1 + (2i−2)·L+ 1. Hen...
2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.