SkyJEPA: Learning Long-Horizon World Models for Zero-Shot Sim-to-Real Control of Quadrotors
Pith reviewed 2026-06-26 08:33 UTC · model grok-4.3
The pith
A latent dynamics model with a physics prober enables zero-shot sim-to-real quadrotor control over long horizons.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
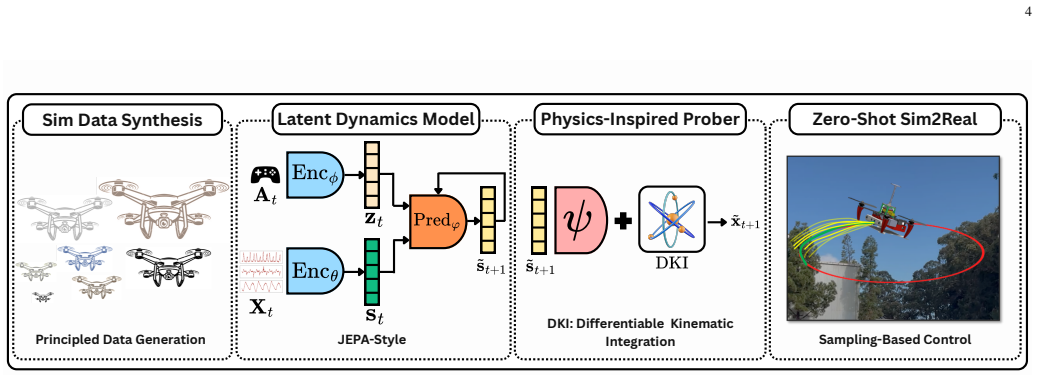
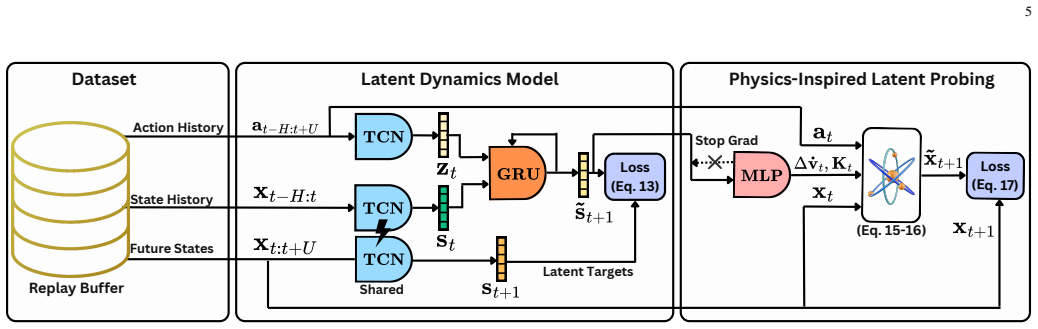
SkyJEPA pairs a latent dynamics model with a physics-inspired prober that maps frozen latent representations to physical state quantities, allowing the model to generate grounded long-horizon rollouts that are combined with sampling-based optimal control for real-time embedded deployment and demonstrated zero-shot sim-to-real transfer.
What carries the argument
The physics-inspired prober, which decodes frozen latent states into accurate physical quantities to ground the predictions.
If this is right
- The model supports real-time optimal control on embedded hardware by using its long-horizon latent predictions.
- Automated simulation-based dataset generation reduces the need for real-world data collection.
- The system generalizes across diverse operating conditions without retraining or fine-tuning.
- Open-loop prediction accuracy and closed-loop stability are maintained in outdoor experiments.
Where Pith is reading between the lines
- The same prober-plus-latent structure could be tested on other agile platforms that require high-frequency control.
- Replacing the sampling-based controller with learned policies might further reduce computation while preserving the long-horizon advantage.
- Extending the prober to output uncertainty estimates could improve safety margins in uncertain environments.
Load-bearing premise
The physics-inspired prober can reliably decode frozen latent states into accurate physical quantities that support stable long-horizon rollouts on real hardware without retraining or fine-tuning.
What would settle it
A closed-loop outdoor flight in which the quadrotor loses stability during a multi-second prediction horizon would show that the prober fails to produce usable physical quantities.
Figures









read the original abstract
Accurate dynamics models are critical for informed decision-making in robotic systems, particularly for agile aerial vehicles operating under uncertainty. Neural network dynamics models are attractive for capturing complex nonlinear effects, but existing predictive approaches struggle with long-horizon forecasting because their autoregressive rollout mechanism amplifies errors over time. Joint Embedding Predictive Architectures (JEPAs) offer a compelling alternative by modeling dynamics in latent space, yet prior JEPA-style methods for robot navigation have been studied primarily for kinematic-level planning, with limited investigation in high-frequency control. In this work, we introduce the JEPA-style model for real-time quadrotor control. The proposed approach combines a latent dynamics model with a novel physics-inspired prober that maps frozen latents to interpretable state, enabling physically grounded long-horizon prediction. Additionally, we combine the learned model with a sampling-based optimal control solution to take advantage of its predictive capabilities for real-time control on embedded hardware. Finally, to reduce the dependence on expensive and unsafe real-world data collection, we develop a structured pipeline for automated dataset generation. Extensive open-loop and outdoor closed-loop experiments demonstrate accurate prediction, robust zero-shot sim-to-real transfer, and strong generalization across diverse operating conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces SkyJEPA, a Joint Embedding Predictive Architecture (JEPA) for learning long-horizon latent dynamics models of quadrotor flight. A physics-inspired prober decodes frozen latent states into interpretable physical quantities to support stable rollouts; the model is paired with sampling-based optimal control for real-time embedded deployment. Training relies on an automated simulation data-generation pipeline rather than real-world collection. The central empirical claims are accurate open-loop prediction, robust zero-shot sim-to-real transfer, and generalization, supported by both open-loop tests and outdoor closed-loop flights under diverse conditions.
Significance. If the reported outdoor closed-loop results hold, the work supplies concrete evidence that latent JEPA-style models, when equipped with a physics-inspired decoder, can enable long-horizon prediction and stable zero-shot transfer for high-frequency quadrotor control without retraining. The automated simulation pipeline and the direct testing of the prober under real disturbances constitute practical strengths. These elements address a recognized bottleneck in sim-to-real robotics and provide falsifiable predictions that future work can replicate or refute.
minor comments (3)
- [Abstract] Abstract: the claim of 'accurate prediction' and 'strong generalization' would be strengthened by naming the specific prediction horizons, RMSE or MAE values, and baseline methods used in the open-loop and closed-loop evaluations.
- [Method] The description of the physics-inspired prober architecture and its training objective is referenced but would benefit from an explicit equation or pseudocode block showing how the prober loss is combined with the JEPA objective.
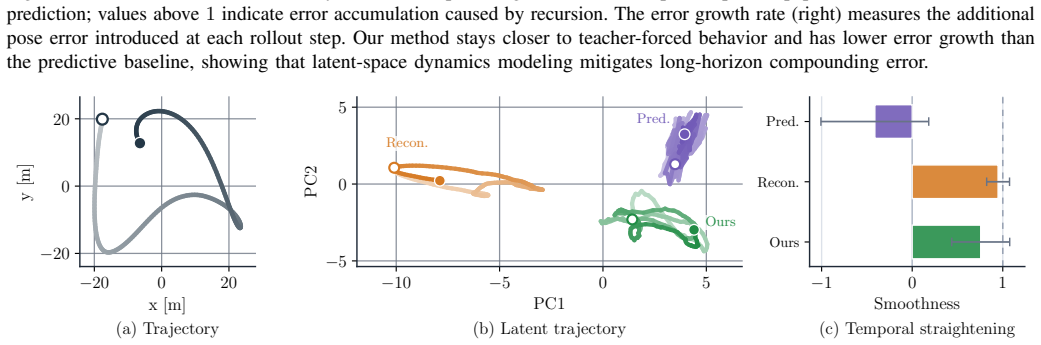
- [Experiments] Figure captions for the outdoor flight results should include the number of trials, wind conditions, and whether any data were excluded, to allow readers to assess the robustness claim directly.
Simulated Author's Rebuttal
We thank the referee for their positive summary, significance assessment, and recommendation of minor revision. The report accurately captures the core contributions of SkyJEPA, including the latent dynamics model, physics-inspired prober, sampling-based control, and automated simulation pipeline. No specific major comments were provided in the report.
Circularity Check
No significant circularity detected
full rationale
The manuscript describes an empirical pipeline: a latent JEPA dynamics model trained on simulated quadrotor trajectories, paired with a separately trained physics-inspired prober that decodes frozen latents into physical states for long-horizon rollouts. All load-bearing claims (prediction accuracy, zero-shot sim-to-real transfer, closed-loop stability) are supported by open-loop and outdoor flight experiments rather than by any equation that reduces a predicted quantity to a parameter fitted from the same quantity. JEPA is referenced as prior architecture but is not invoked via a self-citation chain that forbids alternatives or defines the target result. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- Neural network weights
axioms (1)
- domain assumption Latent-space dynamics avoid the compounding errors of autoregressive real-space rollouts
invented entities (1)
-
Physics-inspired prober
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Opportunities and challenges with au- tonomous micro aerial vehicles,
V . Kumar and N. Michael, “Opportunities and challenges with au- tonomous micro aerial vehicles,”The International Journal of Robotics Research, vol. 31, no. 11, 2012, pp. 1279–1291
2012
-
[2]
Wind turbine crack inspection using a quadrotor with image motion blur avoided,
Y . Wang, Q. Lu, and B. Ren, “Wind turbine crack inspection using a quadrotor with image motion blur avoided,”IEEE Robotics and Automation Letters, vol. 8, no. 2, 2023, pp. 1069–1076
2023
-
[3]
Deep reinforcement learning in a handful of trials using probabilistic dynamics models,
K. Chua, R. Calandra, R. McAllister, and S. Levine, “Deep reinforcement learning in a handful of trials using probabilistic dynamics models,” Advances in Neural Information Processing Systems, vol. 31, 2018
2018
-
[4]
Information theoretic mpc for model-based reinforcement learning,
G. Williams, N. Wagener, B. Goldfain, P. Drews, J. M. Rehg, B. Boots, and E. A. Theodorou, “Information theoretic mpc for model-based reinforcement learning,” inIEEE International Conference on Robotics and Automation (ICRA), 2017, pp. 1714–1721
2017
-
[5]
Model-based reinforcement learning: A survey,
T. M. Moerland, J. Broekens, A. Plaat, and C. M. Jonker, “Model-based reinforcement learning: A survey,”Foundations and Trends in Machine Learning, vol. 16, no. 1, 2023, pp. 1–118
2023
-
[6]
Estimation, control, and planning for aggressive flight with a small quadrotor with a single camera and imu,
G. Loianno, C. Brunner, G. McGrath, and V . Kumar, “Estimation, control, and planning for aggressive flight with a small quadrotor with a single camera and imu,”IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 404–411, 2017. 17
2017
-
[7]
Data-driven system identifica- tion of quadrotors subject to motor delays,
J. Eschmann, D. Albani, and G. Loianno, “Data-driven system identifica- tion of quadrotors subject to motor delays,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 8095– 8102
2024
-
[8]
Physics-inspired temporal learning of quadrotor dynamics for accurate model predictive trajectory tracking,
A. Saviolo, G. Li, and G. Loianno, “Physics-inspired temporal learning of quadrotor dynamics for accurate model predictive trajectory tracking,” IEEE Robotics and Automation Letters, vol. 7, no. 4, 2022, pp. 10256– 10263
2022
-
[9]
Neurobem: Hybrid aerodynamic quadrotor model,
L. Bauersfeld, E. Kaufmann, P. Foehn, S. Sun, and D. Scaramuzza, “Neurobem: Hybrid aerodynamic quadrotor model,” inRobotics: Science and Systems (RSS), 2021
2021
-
[10]
Learning long- horizon predictions for quadrotor dynamics,
P. P. Rao, A. Saviolo, T. C. Ferrari, and G. Loianno, “Learning long- horizon predictions for quadrotor dynamics,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 12 758– 12 765
2024
-
[11]
Learning quadrotor dynamics for precise, safe, and agile flight control,
A. Saviolo and G. Loianno, “Learning quadrotor dynamics for precise, safe, and agile flight control,”Annual Reviews in Control, vol. 55, 2023, pp. 45–60
2023
-
[12]
Hamiltonian-based neural ode networks on the se(3) manifold for dynamics learning and control,
T. Duong and N. Atanasov, “Hamiltonian-based neural ode networks on the se(3) manifold for dynamics learning and control,” inRobotics: Science and Systems (RSS), 2021
2021
-
[13]
Deep learning helicopter dynamics models,
A. Punjani and P. Abbeel, “Deep learning helicopter dynamics models,” inIEEE International Conference on Robotics and Automation (ICRA), 2015, pp. 3223–3230
2015
-
[14]
Cautious model predictive control using gaussian process regression,
L. Hewing, J. Kabzan, and M. N. Zeilinger, “Cautious model predictive control using gaussian process regression,”IEEE Transactions on Control Systems Technology, vol. 28, no. 6, 2019, pp. 2736–2743
2019
-
[15]
One-shot learning of manipulation skills with online dynamics adaptation and neural network priors,
J. Fu, S. Levine, and P. Abbeel, “One-shot learning of manipulation skills with online dynamics adaptation and neural network priors,” in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 4019–4026
2016
-
[16]
Active learning of discrete-time dynamics for uncertainty-aware model predictive control,
A. Saviolo, J. Frey, A. Rathod, M. Diehl, and G. Loianno, “Active learning of discrete-time dynamics for uncertainty-aware model predictive control,” IEEE Transactions on Robotics, vol. 40, 2023, pp. 1273–1291
2023
-
[17]
Safe learning of quadrotor dynamics using barrier certificates,
L. Wang, E. A. Theodorou, and M. Egerstedt, “Safe learning of quadrotor dynamics using barrier certificates,” inIEEE International Conference on Robotics and Automation (ICRA), 2018, pp. 2460–2465
2018
-
[18]
Safe active dynamics learning and control: A sequential exploration–exploitation framework,
T. Lew, A. Sharma, J. Harrison, A. Bylard, and M. Pavone, “Safe active dynamics learning and control: A sequential exploration–exploitation framework,”IEEE Transactions on Robotics, vol. 38, no. 5, 2022, pp. 2888–2907
2022
-
[19]
Neural-fly enables rapid learning for agile flight in strong winds,
M. O’Connell, G. Shi, X. Shi, K. Azizzadenesheli, A. Anandkumar, Y . Yue, and S.-J. Chung, “Neural-fly enables rapid learning for agile flight in strong winds,”Science Robotics, vol. 7, no. 66, 2022, pp. eabm6597
2022
-
[20]
Online dynamics learning for predictive control with an application to aerial robots,
T. Z. Jiahao, K. Y . Chee, and M. A. Hsieh, “Online dynamics learning for predictive control with an application to aerial robots,” inConference on Robot Learning, 2023, pp. 2251–2261
2023
-
[21]
Transformer- based world models are happy with 100k interactions,
J. Robine, M. H ¨oftmann, T. Uelwer, and S. Harmeling, “Transformer- based world models are happy with 100k interactions,” inInternational Conference on Learning Representations (ICLR), 2023
2023
-
[22]
Deep visual foresight for planning robot motion,
C. Finn and S. Levine, “Deep visual foresight for planning robot motion,” inIEEE International Conference on Robotics and Automation (ICRA), 2017, pp. 2786–2793
2017
-
[23]
Example-driven model-based reinforcement learning for solving long-horizon visuomotor tasks,
B. Wu, S. Nair, L. Fei-Fei, and C. Finn, “Example-driven model-based reinforcement learning for solving long-horizon visuomotor tasks,” in Conference on Robot Learning (CoRL), 2021
2021
-
[24]
Discovering governing equations from data by sparse identification of nonlinear dynamical systems,
S. L. Brunton, J. L. Proctor, and J. N. Kutz, “Discovering governing equations from data by sparse identification of nonlinear dynamical systems,”Proceedings of the National Academy of Sciences, vol. 113, no. 15, 2016, pp. 3932–3937
2016
-
[25]
Residual dynamics learning for trajectory tracking for multi-rotor aerial vehicles,
G. Kulathunga, H. Hamed, and A. Klimchik, “Residual dynamics learning for trajectory tracking for multi-rotor aerial vehicles,”Scientific Reports, vol. 14, no. 1, 2024, pp. 1858
2024
-
[26]
Learning quadrotor dynamics using neural network for flight control,
S. Bansal, A. K. Akametalu, F. J. Jiang, F. Laine, and C. J. Tomlin, “Learning quadrotor dynamics using neural network for flight control,” inIEEE 55th Conference on Decision and Control (CDC), 2016, pp. 4653–4660
2016
-
[27]
Multistep prediction of dynamic systems with recurrent neural networks,
N. Mohajerin and S. L. Waslander, “Multistep prediction of dynamic systems with recurrent neural networks,”IEEE Transactions on Neural Networks and Learning Systems, vol. 30, no. 11, 2019, pp. 3370–3383
2019
-
[28]
Temporal convolutions for multi-step quadrotor motion prediction,
S. Looper and S. L. Waslander, “Temporal convolutions for multi-step quadrotor motion prediction,” in2022 19th Conference on Robots and Vision (CRV), 2022, pp. 32–39
2022
-
[29]
Self-supervised learning from images with a joint-embedding predictive architecture,
M. Assran, Q. Duval, I. Misra, P. Bojanowski, P. Vincent, M. Rabbat, Y . LeCun, and N. Ballas, “Self-supervised learning from images with a joint-embedding predictive architecture,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 15 619–15 629
2023
-
[30]
V-jepa: Latent video prediction for visual representation learning,
A. Bardes, Q. Garrido, J. Ponce, X. Chen, M. Rabbat, Y . LeCun, M. Assran, and N. Ballas, “V-jepa: Latent video prediction for visual representation learning,”arXiv preprint arXiv:2312.14119, 2023
-
[31]
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning
M. Assran, A. Bardes, D. Fan, Q. Garrido, R. Howes, M. Muckley, A. Rizvi, C. Roberts, K. Sinha, A. Zholus,et al., “V-jepa 2: Self- supervised video models enable understanding, prediction and planning,” arXiv preprint arXiv:2506.09985, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[32]
A. Bardes, J. Ponce, and Y . LeCun, “Mc-jepa: A joint-embedding predictive architecture for self-supervised learning of motion and content features,”arXiv preprint arXiv:2307.12698, 2023
-
[33]
Dino-wm: World models on pre-trained visual features enable zero-shot planning,
G. Zhou, H. Pan, Y . LeCun, and L. Pinto, “Dino-wm: World models on pre-trained visual features enable zero-shot planning,” inInternational Conference on Machine Learning (ICML), 2025
2025
-
[34]
World models for learning dexterous hand-object interactions from human videos,
R. G. Goswami, A. Bar, D. Fan, T.-Y . Yang, G. Zhou, P. Krishnamurthy, M. Rabbat, F. Khorrami, and Y . LeCun, “World models for learning dexterous hand-object interactions from human videos,”arXiv preprint arXiv:2512.13644, 2026
-
[35]
Navigation world models,
A. Bar, G. Zhou, D. Tran, T. Darrell, and Y . LeCun, “Navigation world models,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025, pp. 15 791–15 801
2025
-
[36]
Ddp-wm: Disentangled dynamics prediction for efficient world models,
S. Yin, K. Yin, W. Chen, Y . Liu, G. Li, and L. Lin, “Ddp-wm: Disentangled dynamics prediction for efficient world models,”arXiv preprint arXiv:2602.01780, 2026
-
[37]
LeWorldModel: Stable End-to-End Joint-Embedding Predictive Architecture from Pixels
L. Maes, Q. L. Lidec, D. Scieur, Y . LeCun, and R. Balestriero, “Leworldmodel: Stable end-to-end joint-embedding predictive architecture from pixels,”arXiv preprint arXiv:2603.19312, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[38]
Learning from reward-free offline data: A case for planning with latent dynamics models,
V . Sobal, W. Zhang, K. Cho, R. Balestriero, T. G. J. Rudner, and Y . LeCun, “Learning from reward-free offline data: A case for planning with latent dynamics models,”arXiv preprint arXiv:2502.14819, 2025
-
[39]
Low-level control of a quadrotor with deep model-based reinforcement learning,
N. O. Lambert, D. S. Drew, J. Yaconelli, S. Levine, R. Calandra, and K. S. J. Pister, “Low-level control of a quadrotor with deep model-based reinforcement learning,”IEEE Robotics and Automation Letters, vol. 4, no. 4, 2019, pp. 4224–4230
2019
-
[40]
Robotic world model: A neural network simulator for robust policy optimization in robotics,
C. Li, A. Krause, and M. Hutter, “Robotic world model: A neural network simulator for robust policy optimization in robotics,” inNeurIPS 2025 Workshop on Embodied World Models for Decision Making, 2025
2025
-
[41]
Learning latent dynamics for planning from pixels,
D. Hafner, T. Lillicrap, I. Fischer, R. Villegas, D. Ha, H. Lee, and J. Davidson, “Learning latent dynamics for planning from pixels,” in International Conference on Machine Learning, 2019, pp. 2555–2565
2019
-
[42]
Transformers are sample-efficient world models,
V . Micheli, E. Alonso, and F. Fleuret, “Transformers are sample-efficient world models,” inInternational Conference on Learning Representations (ICLR), 2023
2023
-
[43]
Mastering diverse control tasks through world models,
D. Hafner, J. Pasukonis, J. Ba, and T. Lillicrap, “Mastering diverse control tasks through world models,”Nature, vol. 640, 2025, pp. 647–653
2025
-
[44]
A. Verraest, S. Bahnam, R. Ferede, G. de Croon, and C. De Wagter, “Skydreamer: Interpretable end-to-end vision-based drone racing with model-based reinforcement learning,”arXiv preprint arXiv:2510.14783, 2025
-
[45]
Accelerating model-based reinforcement learning with state-space world models,
M. Krinner, E. Aljalbout, A. Romero, and D. Scaramuzza, “Accelerating model-based reinforcement learning with state-space world models,” arXiv preprint arXiv:2502.20168, 2025
-
[46]
Dream to fly: Model-based reinforcement learning for vision-based drone flight,
A. Romero, A. Shenai, I. Geles, E. Aljalbout, and D. Scaramuzza, “Dream to fly: Model-based reinforcement learning for vision-based drone flight,” inIEEE International Conference on Robotics and Automation (ICRA), 2026
2026
-
[47]
Efficient Model-Based Reinforcement Learning for Robot Control via Online Optimization
F. Nan, H. Ma, Q. Guan, J. Hughes, M. Muehlebach, and M. Hutter, “Efficient model-based reinforcement learning for robot control via online learning,”arXiv preprint arXiv:2510.18518, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[48]
A path towards autonomous machine intelligence version 0.9.2,
Y . LeCun, “A path towards autonomous machine intelligence version 0.9.2,”Open Review, vol. 62, no. 1, 2022, pp. 1–62
2022
-
[49]
LeJEPA: Provable and Scalable Self-Supervised Learning Without the Heuristics
R. Balestriero and Y . LeCun, “Lejepa: Provable and scalable self-supervised learning without the heuristics,”arXiv preprint arXiv:2511.08544, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[50]
Vicreg: Variance-invariance- covariance regularization for self-supervised learning,
A. Bardes, J. Ponce, and Y . LeCun, “Vicreg: Variance-invariance- covariance regularization for self-supervised learning,” inInternational Conference on Learning Representations (ICLR), 2022
2022
-
[51]
Bootstrap your own latent: A new approach to self-supervised learning,
J.-B. Grill, F. Strub, F. Altch ´e, C. Tallec, P. Richemond, E. Buchatskaya, C. Doersch, B. Avila Pires, Z. Guo, M. G. Azar,et al., “Bootstrap your own latent: A new approach to self-supervised learning,”Advances in Neural Information Processing Systems, vol. 33, 2020, pp. 21271–21284
2020
-
[52]
Minimum snap trajectory generation and control for quadrotors,
D. Mellinger and V . Kumar, “Minimum snap trajectory generation and control for quadrotors,” inIEEE International Conference on Robotics and Automation (ICRA), 2011, pp. 2520–2525. 18
2011
-
[53]
Flightmare: A flexible quadrotor simulator,
Y . Song, S. Naji, E. Kaufmann, A. Loquercio, and D. Scaramuzza, “Flightmare: A flexible quadrotor simulator,” inConference on Robot Learning, 2021, pp. 1147–1157
2021
-
[54]
Raptor: A foundation policy for quadrotor control,
J. Eschmann, D. Albani, and G. Loianno, “Raptor: A foundation policy for quadrotor control,”Science Robotics, vol. 11, no. 114, p. eaec1481, 2026
2026
-
[55]
Px4: A node-based multi- threaded open source robotics framework for deeply embedded platforms,
L. Meier, D. Honegger, and M. Pollefeys, “Px4: A node-based multi- threaded open source robotics framework for deeply embedded platforms,” in2015 IEEE International Conference on Robotics and Automation (ICRA), 2015, pp. 6235–6240
2015
-
[56]
Training efficient controllers via analytic policy gradient,
N. Wiedemann, V . W¨uest, A. Loquercio, M. M ¨uller, D. Floreano, and D. Scaramuzza, “Training efficient controllers via analytic policy gradient,” inIEEE International Conference on Robotics and Automation (ICRA), 2023, pp. 1349–1356
2023
-
[57]
Temporal convolutional networks for action segmentation and detection,
C. Lea, M. D. Flynn, R. Vidal, A. Reiter, and G. D. Hager, “Temporal convolutional networks for action segmentation and detection,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017, pp. 156–165
2017
-
[58]
Gated feedback recurrent neural networks,
J. Chung, C. Gulcehre, K. Cho, and Y . Bengio, “Gated feedback recurrent neural networks,” inProceedings of the 32nd International Conference on Machine Learning, vol. 37, 2015, pp. 2067–2075
2015
-
[59]
Perceptual straightening of natural videos,
O. J. H ´enaff, R. L. T. Goris, and E. P. Simoncelli, “Perceptual straightening of natural videos,”Nature Neuroscience, vol. 22, no. 6, 2019, pp. 984–991
2019
-
[60]
Temporal straightening for latent planning,
Y . Wang, O. Bounou, G. Zhou, R. Balestriero, T. G. Rudner, Y . LeCun, and M. Ren, “Temporal straightening for latent planning,”arXiv preprint arXiv:2603.12231, 2026
-
[61]
A mathematical theory of communication,
C. E. Shannon, “A mathematical theory of communication,”The Bell System Technical Journal, vol. 27, no. 3, pp. 379–423, 1948
1948
-
[62]
T. M. Cover and J. A. Thomas,Elements of Information Theory. Wiley, 1999
1999
-
[63]
Least squares quantization in pcm,
S. P. Lloyd, “Least squares quantization in pcm,”IEEE Transactions on Information Theory, vol. 28, no. 2, pp. 129–137, 1982
1982
-
[64]
Some methods for classification and analysis of multi- variate observations,
J. MacQueen, “Some methods for classification and analysis of multi- variate observations,” inProceedings of the Fifth Berkeley Symposium on Mathematical Statistics and Probability, 1967, pp. 281–297
1967
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.