A modified Riemannian Levenberg-Marquardt Algorithm for robust or constraint optimization on manifolds
Pith reviewed 2026-06-26 07:10 UTC · model grok-4.3
The pith
A robust version of the Riemannian Levenberg-Marquardt algorithm handles optimization problems with outliers on manifolds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
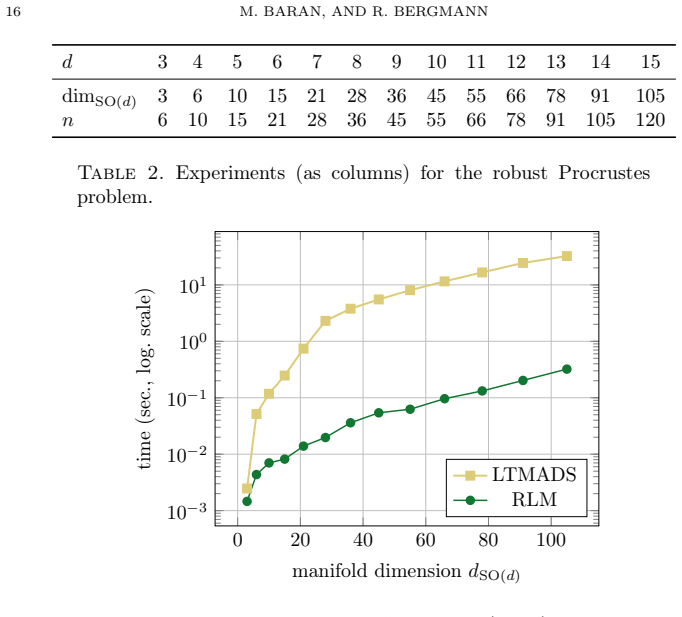
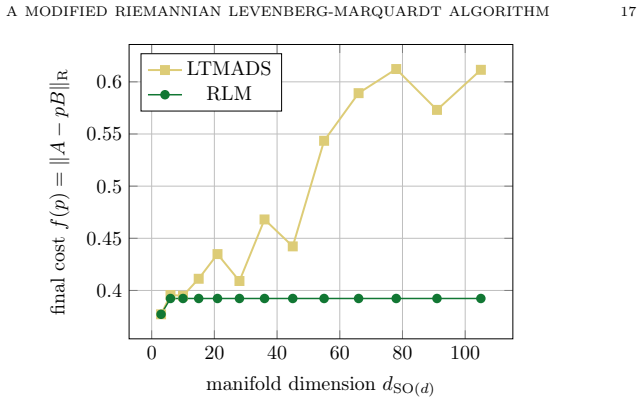
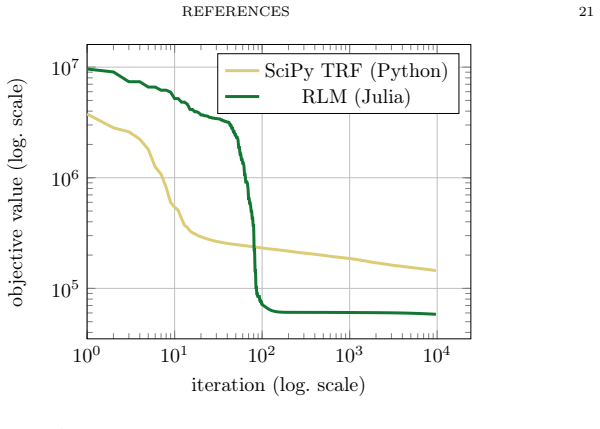
We extend the Levenberg-Marquardt method on Riemannian manifolds to a robust variant that allows to tackle problems from applications where outliers are to be expected. We formally state the framework for a block-wise variant of the Robust Riemannian Levenberg-Marquardt algorithm and discuss how known convergence results can be applied here as well. We further discuss several alternatives for phrasing the sub problem that has to be solved. Finally we illustrate how the accompanying open source implementation can be used to efficiently solve problems such as geodesic regression, Procrustes analysis, subspace Procrustes analysis and bundle adjustment robustly and compare the Levenberg-Marquard
What carries the argument
The block-wise variant of the Robust Riemannian Levenberg-Marquardt algorithm, which modifies the iteration to incorporate a robust loss function for outlier resistance while operating on the manifold.
If this is right
- The algorithm solves geodesic regression robustly even when some data points are outliers.
- It applies directly to robust Procrustes analysis and subspace Procrustes analysis on manifolds.
- Bundle adjustment tasks can be solved robustly using this Levenberg-Marquardt approach.
- Existing convergence results carry over to the robust block-wise case without additional proof.
- Several phrasing options for the inner subproblem give implementers flexibility in code.
Where Pith is reading between the lines
- The block-wise structure may support efficient handling of large or distributed data sets on manifolds.
- Similar robust modifications could be tested on other Riemannian solvers such as trust-region methods.
- The approach may extend to constraint optimization on manifolds by treating constraints through the robust loss.
- Open implementations could enable direct comparisons across multiple robust manifold problems in applied fields.
Load-bearing premise
The block-wise robust formulation inherits convergence guarantees from earlier non-robust Riemannian LM analyses without requiring new proofs or additional regularity conditions on the robust loss function.
What would settle it
A concrete manifold problem with known outliers where the block-wise robust LM fails to converge, while the corresponding non-robust version succeeds, would show that the convergence inheritance does not hold.
Figures



read the original abstract
We extend the Levenberg-Marquardt method on Riemannian manifolds to a robust variant that allows to tackle problems from applications where outliers are to be expected. We formally state the framework for a block-wise variant of the Robust Riemannian Levenberg-Marquardt algorithm and discuss how known convergence results can be applied here as well. We further discuss several alternatives for phrasing the sub problem that has to be solved. Finally we illustrate how the accompanying open source implementation in Manopt$.$jl can be used to efficiently solve problems such as geodesic regression, Procrustes analysis, subspace Procrustes analysis and bundle adjustment robustly and compare the Levenberg-Marquardt solver to other solvers for nonsmooth Riemannian optimization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends the Riemannian Levenberg-Marquardt method to a robust variant for optimization problems with outliers. It formally states a block-wise formulation of the Robust Riemannian Levenberg-Marquardt algorithm, discusses applicability of existing convergence results to this variant, presents alternatives for phrasing the subproblem, and demonstrates an open-source implementation in Manopt.jl on examples including geodesic regression, Procrustes analysis, subspace Procrustes analysis, and bundle adjustment, with comparisons to other nonsmooth Riemannian solvers.
Significance. If the convergence inheritance holds, the work supplies a practical, reproducible algorithmic tool for robust manifold optimization in applications prone to outliers (e.g., computer vision tasks). The open-source Manopt.jl implementation and explicit discussion of subproblem alternatives constitute concrete strengths that enhance usability.
major comments (2)
- [§4] §4 (convergence discussion): The statement that 'known convergence results can be applied here as well' is not accompanied by any verification that the robust loss function preserves the smoothness, Lipschitz-gradient, or Hessian-regularity assumptions required by the cited non-robust Riemannian LM theorems. This directly undermines the central claim that the block-wise robust framework inherits those guarantees without additional analysis.
- [§2] §2 (framework statement): The robust loss is never explicitly defined or stated (e.g., no formula for the Huber or other loss, no discussion of its differentiability properties). Without this, it is impossible to confirm that the local quadratic model structure of the LM step remains valid or that nondifferentiability points do not appear, rendering the block-wise extension's theoretical grounding incomplete.
minor comments (2)
- The title refers to 'constraint optimization' but the abstract and body focus exclusively on the robust case; a clarifying sentence on whether constraints are also treated would improve scope alignment.
- In the numerical examples section, the comparison metrics (e.g., iteration counts, final cost, robustness to outlier percentage) should be tabulated for reproducibility.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive feedback on the manuscript. We address the two major comments point by point below, committing to revisions that strengthen the theoretical presentation without altering the core contributions.
read point-by-point responses
-
Referee: [§2] §2 (framework statement): The robust loss is never explicitly defined or stated (e.g., no formula for the Huber or other loss, no discussion of its differentiability properties). Without this, it is impossible to confirm that the local quadratic model structure of the LM step remains valid or that nondifferentiability points do not appear, rendering the block-wise extension's theoretical grounding incomplete.
Authors: We agree that an explicit definition of the robust loss is required for rigor. The revised manuscript will include the precise formula for the robust loss function (e.g., the Huber loss or a smoothed variant) together with a discussion of its differentiability properties. We will clarify that the local quadratic model in the LM step is constructed from the gradient of the loss and a regularized approximation to the Hessian, with explicit handling of points of nondifferentiability via one-sided derivatives or local smoothing to ensure the subproblem remains well-defined. This addition directly addresses the completeness of the block-wise framework's theoretical grounding. revision: yes
-
Referee: [§4] §4 (convergence discussion): The statement that 'known convergence results can be applied here as well' is not accompanied by any verification that the robust loss function preserves the smoothness, Lipschitz-gradient, or Hessian-regularity assumptions required by the cited non-robust Riemannian LM theorems. This directly undermines the central claim that the block-wise robust framework inherits those guarantees without additional analysis.
Authors: The manuscript's statement in §4 is intentionally concise because the block-wise formulation is designed to inherit the structure of the original LM subproblem. However, we accept that explicit verification of the assumptions for the robust loss is necessary to support the inheritance claim. In the revision we will expand §4 to state the precise conditions (C^1 smoothness, Lipschitz continuity of the gradient, and bounded Hessian regularity) under which the cited theorems apply, verify them for standard robust losses such as Huber (or note when smoothing is required), and qualify the claim accordingly. If a chosen loss violates an assumption, we will either restrict the statement or reference available nonsmooth extensions. revision: yes
Circularity Check
No circularity: algorithmic extension with external convergence inheritance
full rationale
The paper describes an algorithmic construction extending Riemannian LM to a block-wise robust variant and states that known convergence results from prior non-robust analyses can be applied. No equations, fitted parameters, or self-definitional reductions appear in the provided abstract or description. The central claim is an extension plus discussion of applicability of external results; no load-bearing step reduces by construction to the paper's own inputs, self-citations, or renamed empirical patterns. This is a standard case of an honest non-finding for an algorithmic paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
available online at press.princeton.edu/chapters/absil/
P.-A.Absil,R.Mahony,andR.Sepulchre.Optimization Algorithms on Matrix Manifolds. available online at press.princeton.edu/chapters/absil/. Princeton University Press, 2008.doi:10.1515/9781400830244
-
[2]
S.Adachi,T.Okuno,andA.Takeda.Riemannian Levenberg-Marquardt Method with Global and Local Convergence Properties. 2022. arXiv:2210.00253
arXiv 2022
-
[3]
Agarwal, K
S. Agarwal, K. Mierle, and T. C. S. Team.Ceres Solver. Version 2.2. 2023. url:https://github.com/ceres-solver/ceres-solver
2023
-
[4]
A modified proximal point method for DC functions on Hadamard manifolds
Y. T. Almeida, J. X. Cruz Neto, P. R. Oliveira, and J. C. d. O. Souza. “A modified proximal point method for DC functions on Hadamard manifolds”. In:Computational Optimization and Applications76.3 (2020), pp. 649–673. doi:10.1007/s10589-020-00173-3. 22 REFERENCES
-
[5]
Manifolds.jl: An Exten- sible Julia Framework for Data Analysis on Manifolds
S. D. Axen, M. Baran, R. Bergmann, and K. Rzecki. “Manifolds.jl: An Exten- sible Julia Framework for Data Analysis on Manifolds”. In:ACM Transactions on Mathematical Software49.4 (2023).doi:10.1145/3618296
-
[6]
Computing medians and means in Hadamard spaces
M. Bačák. “Computing medians and means in Hadamard spaces”. In:SIAM Journal on Optimization24.3(2014),pp.1542–1566.doi:10.1137/140953393
-
[7]
M. Baran, R. Bergmann, and P. Przybysz.A Riemannian quasi-Newton al- gorithm for optimization with Euclidean bounds. 2026. arXiv:2605.10573
Pith/arXiv arXiv 2026
-
[8]
Thedifference of convex algorithm on Hadamard manifolds
R.Bergmann,O.P.Ferreira,E.M.Santos,andJ.C.O.Souza.“Thedifference of convex algorithm on Hadamard manifolds”. In:Journal of Optimization Theory and Applications(2024).doi:10.1007/s10957-024-02392-8. arXiv: 2112.05250
-
[9]
Bergmann, H
R. Bergmann, H. Jasa, P. John, and M. Pfeffer.The Intrinsic Riemann- ian Proximal Gradient Method for Convex Optimization. 2025. arXiv:2507. 16055
2025
-
[10]
Bergmann, H
R. Bergmann, H. Jasa, P. John, and M. Pfeffer.The Intrinsic Riemannian Proximal Gradient Method for Nonconvex Optimization. 2025. arXiv:2506. 09775
2025
-
[11]
Manopt.jl: Optimization on manifolds in Julia
R. Bergmann. “Manopt.jl: Optimization on manifolds in Julia”. In:Journal of Open Source Software7.70 (2022), p. 3866.doi:10.21105/joss.03866
-
[12]
R.Bergmann,R.Herzog,andH.Jasa.The Riemannian convex bundle method
-
[13]
Fenchel duality theory and a primal-dual algorithm on Riemann- ian manifolds
R. Bergmann, R. Herzog, M. Silva Louzeiro, D. Tenbrinck, and J. Vidal- Núñez. “Fenchel duality theory and a primal-dual algorithm on Riemann- ian manifolds”. In:Foundations of Computational Mathematics21.6 (2021), pp. 1465–1504.doi:10.1007/s10208-020-09486-5. arXiv:1908.02022
-
[14]
R. Bergmann, J. Persch, and G. Steidl. “A parallel Douglas Rachford algo- rithm for minimizing ROF-like functionals on images with values in symmet- ric Hadamard manifolds”. In:SIAM Journal on Imaging Sciences9.4 (2016), pp. 901–937.doi:10.1137/15M1052858. arXiv:1512.02814
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1137/15m1052858 2016
-
[15]
Manopt, a Matlab toolbox for optimization on manifolds
N. Boumal, B. Mishra, P.-A. Absil, and R. Sepulchre. “Manopt, a Matlab toolbox for optimization on manifolds”. In:Journal of Machine Learning Re- search15 (2014), pp. 1455–1459.url:https://www.jmlr.org/papers/v15/ boumal14a.html
2014
-
[16]
Boumal.An Introduction to Optimization on Smooth Manifolds
N. Boumal.An Introduction to Optimization on Smooth Manifolds. Cam- bridge University Press, 2023.doi:10.1017/9781009166164.url:https: //www.nicolasboumal.net/book
-
[17]
P. Breiding and N. Vannieuwenhoven. “Convergence analysis of Riemann- ian Gauss–Newton methods and its connection with the geometric condi- tion number”. In:Applied Mathematics Letters78 (2018), pp. 42–50.doi: 10.1016/j.aml.2017.10.009
-
[18]
A box constrained gradient projection algorithm for compressed sensing
R. L. Broughton, I. D. Coope, P. F. Renaud, and R. E. H. Tappenden. “A box constrained gradient projection algorithm for compressed sensing”. In:Signal Processing91.8 (2011), pp. 1985–1992.doi:10.1016/j.sigpro.2011.03. 003
-
[19]
A Limited Memory Algorithm for Bound Constrained Optimization
R. H. Byrd, P. Lu, J. Nocedal, and C. Zhu. “A Limited Memory Algorithm for Bound Constrained Optimization”. In:SIAM Journal on Scientific Comput- ing16.5 (1995). Publisher: Society for Industrial and Applied Mathematics, pp. 1190–1208.doi:10.1137/0916069. REFERENCES 23
-
[20]
M. P. do Carmo.Riemannian Geometry. Mathematics: Theory & Applica- tions. Boston, MA: Birkhäuser Boston, Inc., 1992
1992
-
[21]
D. W. Dreisigmeyer.Direct Search Algorithms over Riemannian Manifolds. Tech. rep. Optimization Online, 2007.url:https://optimization-online. org/?p=9134
2007
-
[22]
Robust Recovery of Signals From a Structured Union of Subspaces
Y. C. Eldar and M. Mishali. “Robust Recovery of Signals From a Structured Union of Subspaces”. In:IEEE Transactions on Information Theory55.11 (2009), pp. 5302–5316.doi:10.1109/TIT.2009.2030471
-
[23]
J. Fan. “Convergence Rate of The Trust Region Method for Nonlinear Equa- tions Under Local Error Bound Condition”. In:Computational Optimization and Applications34.2 (2006), pp. 215–227.doi:10.1007/s10589-005-3078- 8
-
[24]
Proximalgradientmethod for nonconvex and nonsmooth optimization on Hadamard manifolds
S.Feng,W.Huang,L.Song,S.Ying,andT.Zeng.“Proximalgradientmethod for nonconvex and nonsmooth optimization on Hadamard manifolds”. In:Op- timization Letters16.8 (2021), pp. 2277–2297.doi:10.1007/s11590- 021- 01822-0
-
[25]
S. Feng, Y. Jiang, W. Huang, and S. Ying.A Riemannian Accelerated Prox- imal Gradient Method. 2025. arXiv:2509.21897
arXiv 2025
-
[26]
O. P. Ferreira, D. S. Gonçalves, M. S. Louzeiro, S. Z. Németh, and J. Zhu. A Subdifferential Characterization via Busemann Functions and Applications to DC Optimization on Hadamard Manifolds. 2026. arXiv:2602.20931
arXiv 2026
-
[27]
Subgradient algorithm on Riemannian man- ifolds
O. Ferreira and P. R. Oliveira. “Subgradient algorithm on Riemannian man- ifolds”. In:Journal of Optimization Theory and Applications97.1 (1998), pp. 93–104.doi:10.1023/A:1022675100677
-
[28]
Proximal point algorithm on Riemannian manifolds
O. Ferreira and P. R. Oliveira. “Proximal point algorithm on Riemannian manifolds”. In:Optimization. A Journal of Mathematical Programming and Operations Research51.2(2002),pp.257–270.doi:10.1080/02331930290019413
-
[29]
Geodesic regression and the theory of least squares on Rie- mannianmanifolds
P. T. Fletcher. “Geodesic regression and the theory of least squares on Rie- mannianmanifolds”.In:International Journal of Computer Vision105(2013), pp. 171–185.doi:10.1007/s11263-012-0591-y
-
[30]
Principal Geodesic Analysis on Symmetric Spaces: Statistics of Diffusion Tensors
P. T. Fletcher and S. Joshi. “Principal Geodesic Analysis on Symmetric Spaces: Statistics of Diffusion Tensors”. In:Computer Vision and Mathemati- cal Methods in Medical and Biomedical Image Analysis. 2004, pp. 87–98.doi: 10.1007/978-3-540-27816-0_8
-
[31]
T. Fulová and M. Trnovská.Solving constrained Procrustes problems: a conic optimization approach. 2023. arXiv:2304.14961
arXiv 2023
-
[32]
Bound constrained bundle adjustment for reliable 3D reconstruction
Y. Gong, D. Meng, and E. J. Seibel. “Bound constrained bundle adjustment for reliable 3D reconstruction”. In:Optics Express23.8 (2015), pp. 10771– 10785.doi:10.1364/OE.23.010771
-
[33]
A proximal bundle algorithm for nonsmooth optimization on Riemannian manifolds
N. Hoseini Monjezi, S. Nobakhtian, and M. R. Pouryayevali. “A proximal bundle algorithm for nonsmooth optimization on Riemannian manifolds”. In: IMA Journal of Numerical Analysis(2021).doi:10.1093/imanum/drab091
-
[34]
Riemannian proximal gradient methods
W. Huang and K. Wei. “Riemannian proximal gradient methods”. In:Math- ematical Programming194.1–2 (2021), pp. 371–413.doi:10.1007/s10107- 021-01632-3
-
[35]
An inexact Riemannian proximal gradient method
W. Huang and K. Wei. “An inexact Riemannian proximal gradient method”. In:Computational Optimization and Applications85.1 (2023), pp. 1–32.doi: 10.1007/s10589-023-00451-w. 24 REFERENCES
-
[36]
H.Jasa,R.Bergmann,C.Kümmerle,A.Athreya,andZ.Lubberts.Procrustes Problems on Random Matrices. 2025. arXiv:2510.05182
arXiv 2025
-
[37]
Joyce.On manifolds with corners
D. Joyce.On manifolds with corners. arXiv:0910.3518 [math]. 2010.doi:10. 48550/arXiv.0910.3518
Pith/arXiv arXiv 2010
-
[38]
Sparse regression using mixed norms
M. Kowalski. “Sparse regression using mixed norms”. In:Applied and Compu- tational Harmonic Analysis27.3 (2009), pp. 303–324.doi:10.1016/j.acha. 2009.05.006
-
[39]
Riemannian Interior Point Methods for Constrained Optimization on Manifolds
Z. Lai and A. Yoshise. “Riemannian Interior Point Methods for Constrained Optimization on Manifolds”. In:Journal of Optimization Theory and Applica- tions201.1 (2024), pp. 433–469.doi:10.1007/s10957-024-02403-8. arXiv: 2203.09762
-
[40]
Background subtraction via online box constrained RPCA
H. Li, Z. Miao, Y. Li, J. Wang, and Y. Zhang. “Background subtraction via online box constrained RPCA”. In:Proceedings of 2018 International Confer- ence on Mathematics and Artificial Intelligence. ICMAI ’18. New York, NY, USA: Association for Computing Machinery, 2018, pp. 26–29.doi:10.1145/ 3208788.3208797
arXiv 2018
-
[41]
E. Loayza-Romero, B. Sibum, and K. Welker.Retraction based regression methods on Riemannian manifolds. 2026. arXiv:2606.02116
Pith/arXiv arXiv 2026
-
[42]
J. Nocedal and S. J. Wright.Numerical Optimization. 2nd ed. New York: Springer, 2006.doi:10.1007/978-0-387-40065-5
-
[43]
Peeters.On a Riemannian Version of the Levenberg-Marquardt Algorithm
R. Peeters.On a Riemannian Version of the Levenberg-Marquardt Algorithm. Serie Research Memoranda 0011. VU University Amsterdam, Faculty of Eco- nomics, Business Administration and Econometrics, 1993.url:https : / / EconPapers.repec.org/RePEc:vua:wpaper:1993-11
1993
-
[44]
A. D. Prete. “Joint Position and Velocity Bounds in Discrete-Time Acceler- ation/Torque Control of Robot Manipulators”. In:IEEE Robotics and Au- tomation Letters3.1 (2018), pp. 281–288.doi:10.1109/LRA.2017.2738321. (Visited on 06/18/2026)
-
[45]
A gradient method for geodesic data fitting on some sym- metric Riemannian manifolds
Q. Rentmeesters. “A gradient method for geodesic data fitting on some sym- metric Riemannian manifolds”. In:Decision and Control and European Con- trol Conference (CDC-ECC), 2011 50th IEEE Conference on. 2011, pp. 7141– 7146.doi:10.1109/CDC.2011.6161280
-
[46]
Robust Geodesic Regression
H.-Y. Shin and H.-S. Oh. “Robust Geodesic Regression”. In:International Journal of Computer Vision130.2 (2022), pp. 478–503.doi:10 . 1007 / s11263-021-01561-w
2022
-
[47]
A proximal point algorithm for DC functions on Hadamard manifolds
J. C. O. Souza and P. R. Oliveira. “A proximal point algorithm for DC functions on Hadamard manifolds”. In:Journal of Global Optimization63.4 (2015), pp. 797–810.doi:10.1007/s10898-015-0282-7
-
[48]
Pymanopt: A Python toolbox for optimization on manifolds using automatic differentiation
J. Townsend, N. Koep, and S. Weichwald. “Pymanopt: A Python toolbox for optimization on manifolds using automatic differentiation”. In:Journal of Machine Learning Research17.137 (2016), pp. 1–5. arXiv:1603.03236.url: https://jmlr.org/papers/v17/16-177.html
arXiv 2016
-
[49]
Bun- dle Adjustment — A Modern Synthesis
B. Triggs, P. F. McLauchlan, R. I. Hartley, and A. W. Fitzgibbon. “Bun- dle Adjustment — A Modern Synthesis”. In:Vision Algorithms: Theory and Practice. 2000, pp. 298–372.doi:10.1007/3-540-44480-7_21
-
[50]
P. Virtanen, R. Gommers, T. E. Oliphant, M. Haberland, T. Reddy, D. Cour- napeau, E. Burovski, P. Peterson, W. Weckesser, J. Bright, S. J. van der Walt, M. Brett, J. Wilson, K. J. Millman, N. Mayorov, A. R. J. Nelson, E. Jones, REFERENCES 25 R. Kern, E. Larson, C. J. Carey, İ. Polat, Y. Feng, E. W. Moore, J. Van- derPlas, D. Laxalde, J. Perktold, R. Cimrm...
-
[51]
A Least Squares Estimate of Satellite Attitude
G. Wahba. “A Least Squares Estimate of Satellite Attitude”. In:SIAM Review 7.3 (1965), pp. 409–409.doi:10.1137/1007077
-
[52]
Robust Bundle Adjustment Revisited
C. Zach. “Robust Bundle Adjustment Revisited”. In:Computer Vision – ECCV 2014. Ed. by D. Fleet, T. Pajdla, B. Schiele, and T. Tuytelaars. Vol. 8693. Cham: Springer International Publishing, 2014, pp. 772–787.doi: 10.1007/978-3-319-10602-1_50. (M. Baran)AGH University of Krakow 30 Mickiewicz A ve., 30-059 Krakow, Poland Email address:mbaran@agh.edu.pl (R. ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.