RigPI: Dynamic Parameter Identification of Rigid Body via VLM-Seeded Differentiable Simulation
Pith reviewed 2026-06-26 05:20 UTC · model grok-4.3
The pith
RigPI uses a vision-language model to seed and constrain a differentiable simulator for identifying inertial and frictional parameters of rigid bodies during robot interaction.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
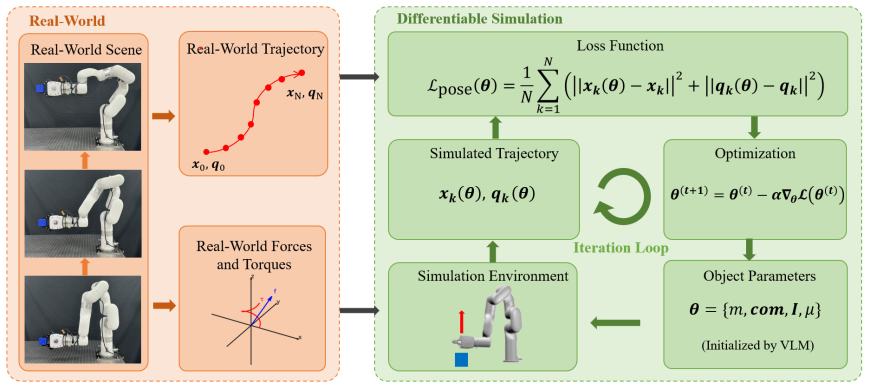
RigPI integrates vision-based semantic priors, force-torque measurements, and motion observations within a differentiable simulation pipeline. A vision-language model supplies informed initialization and a constrained search space, while gradient information from the simulator enables efficient parameter refinement. The two-stage optimization strategy reduces sensitivity to noise and avoids physically implausible solutions. Real-world experiments on objects with revolute and prismatic joints show that the method produces accurate and stable estimates that reproduce manipulation trajectories on a physical robot.
What carries the argument
The two-stage optimization that first applies VLM-derived initialization and search-space constraints, then performs gradient-based refinement inside the differentiable simulator.
If this is right
- Parameter estimates remain stable across repeated trials despite sensing noise.
- Identified values allow a robot to reproduce observed manipulation trajectories when used in prediction.
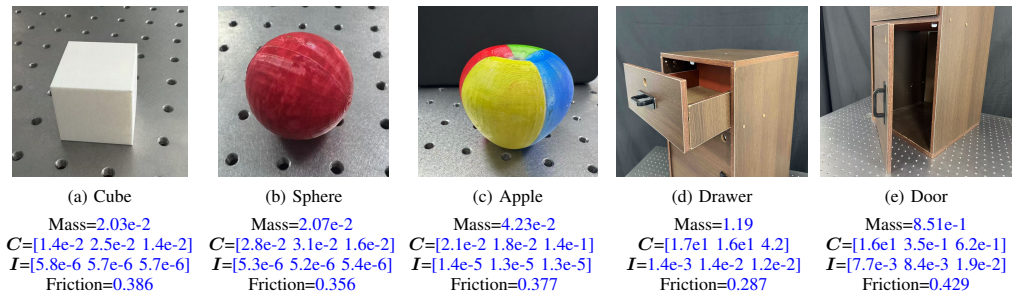
- The framework applies to both single rigid bodies and multi-link assemblies with revolute or prismatic joints.
- Two-stage refinement prevents convergence to non-physical parameter sets.
Where Pith is reading between the lines
- The same seeding approach could reduce the amount of physical interaction data needed when identifying parameters for new object classes.
- Parameter sets obtained this way might support longer-horizon planning in manipulation tasks where model mismatch would otherwise accumulate.
- Extending the differentiable simulator to include contact-rich or deformable elements would test whether the VLM seeding strategy generalizes beyond rigid bodies.
Load-bearing premise
The vision-language model must provide initialization and search-space limits accurate and unbiased enough that gradient descent converges to physically consistent values instead of noise-driven local minima.
What would settle it
Forward-simulate the identified parameters on held-out real-robot interaction sequences and measure trajectory error; sustained large mismatches between predicted and observed motion would show the estimates lack predictive validity.
Figures



read the original abstract
Accurate physical parameter identification of manipulated objects is fundamental to advanced robotic manipulation and the construction of faithful digital twins. However, acquiring physically consistent inertial and frictional properties from real-world interactions remains challenging due to sensing noise, modeling errors, and limited prior knowledge. This paper presents RigPI, a systematic framework for identifying dynamic parameters of both unconstrained rigid bodies and multi-link rigid bodies during robot-object interaction. RigPI integrates vision-based semantic priors, force-torque measurements, and motion observations within a differentiable simulation pipeline. A vision-language model (VLM) provides informed initialization and a constrained search space, while gradient information from a differentiable physics simulator enables efficient and stable parameter refinement. The proposed two-stage optimization strategy alleviates sensitivity to noise and avoids physically implausible solutions. Extensive real-world experiments on objects with revolute and prismatic joints demonstrate that RigPI achieves accurate and stable parameter estimates, and successfully reproduces manipulation trajectories on a real robot with parameter-aware predictive validity. These results highlight the effectiveness and robustness of RigPI for real-world robotic system identification tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces RigPI, a two-stage framework for dynamic parameter identification of rigid bodies (including multi-link systems with revolute or prismatic joints) that combines VLM-derived semantic priors for initialization and search-space constraints, force-torque sensing, motion observations, and gradient-based refinement inside a differentiable physics simulator. The central claim is that this pipeline yields physically consistent inertial and frictional parameters that enable accurate, stable estimates and parameter-aware predictive reproduction of manipulation trajectories on hardware.
Significance. If the experimental claims hold with quantitative support, the work would offer a practical advance in robotic system identification by reducing reliance on manual priors and mitigating noise sensitivity through constrained differentiable optimization. Strengths include the explicit integration of vision-language priors with physics-based gradients and the focus on real-world robot-object interaction rather than simulation-only validation.
major comments (2)
- [Abstract / Experiments] Abstract and experimental validation sections: the claims of 'accurate and stable parameter estimates' and 'successful reproduction of manipulation trajectories with parameter-aware predictive validity' are asserted without any reported quantitative metrics (e.g., RMSE on parameters or trajectories, error bars, baseline comparisons to non-VLM or non-differentiable methods, or exclusion criteria for trials). This absence prevents evaluation of the data-to-claim link and is load-bearing for the central experimental contribution.
- [Method / Experiments] Optimization pipeline description (likely §3 or §4): it is not shown whether any reported performance metric is independent of the fitted parameters themselves (e.g., whether trajectory reproduction error is computed on held-out data or is partly defined by the same parameters being optimized), raising a potential circularity concern that must be addressed with explicit equations and evaluation protocol.
minor comments (2)
- [Method] Notation for the constrained search space and VLM-derived bounds should be defined explicitly with equations rather than prose descriptions to allow reproducibility.
- [Figures] Figure captions for any trajectory plots or parameter convergence curves should include axis labels, units, and whether shaded regions represent standard deviation across trials.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on RigPI. We address each major comment below and will revise the manuscript to strengthen the experimental reporting and evaluation protocol.
read point-by-point responses
-
Referee: [Abstract / Experiments] Abstract and experimental validation sections: the claims of 'accurate and stable parameter estimates' and 'successful reproduction of manipulation trajectories with parameter-aware predictive validity' are asserted without any reported quantitative metrics (e.g., RMSE on parameters or trajectories, error bars, baseline comparisons to non-VLM or non-differentiable methods, or exclusion criteria for trials). This absence prevents evaluation of the data-to-claim link and is load-bearing for the central experimental contribution.
Authors: We agree that the provided manuscript text does not report specific quantitative metrics such as RMSE values, error bars, baseline comparisons, or trial exclusion criteria to support the claims. In the revised manuscript, we will incorporate these metrics from the real-world experiments, including parameter estimation errors, trajectory reproduction errors, comparisons to non-VLM and non-differentiable baselines, and details on data handling to establish a clear data-to-claim link. revision: yes
-
Referee: [Method / Experiments] Optimization pipeline description (likely §3 or §4): it is not shown whether any reported performance metric is independent of the fitted parameters themselves (e.g., whether trajectory reproduction error is computed on held-out data or is partly defined by the same parameters being optimized), raising a potential circularity concern that must be addressed with explicit equations and evaluation protocol.
Authors: We acknowledge the circularity concern. The revised manuscript will include an explicit description of the evaluation protocol with equations, clarifying that trajectory reproduction errors are computed on held-out real-robot interaction data separate from the optimization process, ensuring independence from the fitted parameters. revision: yes
Circularity Check
No significant circularity identified
full rationale
The provided abstract and description outline a standard two-stage pipeline: VLM supplies initialization and search-space constraints, followed by gradient-based refinement in a differentiable simulator using force-torque and motion data. Reported outcomes are accuracy of fitted parameters and forward prediction of held-out manipulation trajectories on hardware. No equations, self-citations, or steps are exhibited that reduce the claimed predictions or uniqueness results to the fitted inputs by construction, nor is any performance metric defined tautologically in terms of the parameters themselves. The central claim rests on empirical validation rather than self-referential definitions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Rigid body load identification for manipulators,
C. G. Atkeson, C. H. An, and J. M. Hollerbach, “Rigid body load identification for manipulators,” in1985 24th IEEE Conference on Decision and Control, 1985, pp. 996–1002
1985
-
[2]
On-line estimation of inertial parameters using a recursive total least-squares approach,
D. Kubus, T. Kroger, and F. M. Wahl, “On-line estimation of inertial parameters using a recursive total least-squares approach,” in2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2008, pp. 3845–3852
2008
-
[3]
An accurate identification method based on double weighting for inertial parameters of robot payloads,
T. Xu, J. Fan, Q. Fang, Y . Zhu, and J. Zhao, “An accurate identification method based on double weighting for inertial parameters of robot payloads,”Robotica, vol. 40, no. 12, p. 4358–4374, 2022
2022
-
[4]
Newton: GPU-accelerated physics simulation for robotics, and simulation research
Newton Contributors, “Newton: GPU-accelerated physics simulation for robotics, and simulation research.” Newton a Series of LF Projects, LLC, 2025. [Online]. Available: https://github.com/newton-physics/ newton
2025
-
[5]
Difftaichi: Differentiable programming for physical simulation,
Y . Hu, L. Anderson, T.-M. Li, Q. Sun, N. Carr, J. Ragan-Kelley, and F. Durand, “Difftaichi: Differentiable programming for physical simulation,”International Conference on Learning Representations (ICLR), 2020
2020
-
[6]
Dojo: A differentiable physics engine for robotics,
T. Howell, S. Le Cleac’h, J. Bruedigam, Z. Kolter, M. Schwager, and Z. Manchester, “Dojo: A differentiable physics engine for robotics,”arXiv preprint arXiv:2203.00806, 2022. [Online]. Available: https://arxiv.org/abs/2203.00806
-
[7]
Differentiable simulation for physical system identification,
Q. Le Lidec, I. Kalevatykh, I. Laptev, C. Schmid, and J. Carpentier, “Differentiable simulation for physical system identification,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3413–3420, 2021
2021
-
[8]
gradsim: Differentiable simulation for system identification and visuomotor control,
K. M. Jatavallabhula, M. Macklin, F. Golemo, V . V oleti, L. Petrini, M. Weiss, B. Considine, J. Parent-Levesque, K. Xie, K. Erleben, L. Paull, F. Shkurti, D. Nowrouzezahrai, and S. Fidler, “gradsim: Differentiable simulation for system identification and visuomotor control,” 2021. [Online]. Available: https://arxiv.org/abs/2104.02646
-
[9]
Differentiable physics and stable modes for tool-use and manipulation planning,
M. Toussaint, K. R. Allen, K. A. Smith, and J. B. Tenenbaum, “Differentiable physics and stable modes for tool-use and manipulation planning,” 2018. [Online]. Available: https://api.semanticscholar.org/ CorpusID:46980516
2018
-
[10]
Differentiable physics simulation of dynamics-augmented neural objects,
S. Le Cleac’h, H.-X. Yu, M. Guo, T. Howell, R. Gao, J. Wu, Z. Manchester, and M. Schwager, “Differentiable physics simulation of dynamics-augmented neural objects,”IEEE Robotics and Automation Letters, vol. 8, no. 5, pp. 2780–2787, 2023, publisher: IEEE
2023
-
[11]
A Differentiable Physics Engine for Deep Learning in Robotics
J. Degrave, M. Hermans, J. Dambre, and F. wyffels, “A differentiable physics engine for deep learning in robotics,” 2018. [Online]. Available: https://arxiv.org/abs/1611.01652
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[12]
Learning object properties using robot proprioception via differentiable robot-object interaction,
P. Y . Chen, C. Liu, P. Ma, J. Eastman, D. Rus, D. Randle, Y . Ivanov, and W. Matusik, “Learning object properties using robot proprioception via differentiable robot-object interaction,” 2025. [Online]. Available: https://arxiv.org/abs/2410.03920
-
[13]
Graph networks as learnable physics engines for inference and control
A. Sanchez-Gonzalez, N. Heess, J. T. Springenberg, J. Merel, M. Riedmiller, R. Hadsell, and P. Battaglia, “Graph networks as learnable physics engines for inference and control,” 2018. [Online]. Available: https://arxiv.org/abs/1806.01242
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[14]
Deep Lagrangian Networks: Using Physics as Model Prior for Deep Learning
M. Lutter, C. Ritter, and J. Peters, “Deep lagrangian networks: Using physics as model prior for deep learning,” 2019. [Online]. Available: https://arxiv.org/abs/1907.04490
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[15]
Differentiable fluid physics parameter identification by stirring and for stirring,
W. Xu*, D. Zheng*, Y . Li, J. Ren, and C. Lu, “Differentiable fluid physics parameter identification by stirring and for stirring,” in IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2024
2024
-
[16]
Differentiable cloth parameter identification and state estimation in manipulation,
D. Zheng*, S. Yao*, W. Xu, and C. Lu, “Differentiable cloth parameter identification and state estimation in manipulation,”IEEE Robotics and Automation Letters, 2024
2024
-
[17]
Galileo: Perceiving physical object properties by integrating a physics engine with deep learning,
J. Wu, I. Yildirim, J. J. Lim, B. Freeman, and J. Tenenbaum, “Galileo: Perceiving physical object properties by integrating a physics engine with deep learning,” inAdvances in Neural Information Processing Systems, C. Cortes, N. Lawrence, D. Lee, M. Sugiyama, and R. Garnett, Eds., vol. 28. Curran Associates, Inc.,
-
[18]
Available: https://proceedings.neurips.cc/paper files/ paper/2015/file/d09bf41544a3365a46c9077ebb5e35c3-Paper.pdf
[Online]. Available: https://proceedings.neurips.cc/paper files/ paper/2015/file/d09bf41544a3365a46c9077ebb5e35c3-Paper.pdf
2015
-
[19]
image2mass: Estimating the mass of an object from its image,
T. Standley, O. Sener, D. Chen, and S. Savarese, “image2mass: Estimating the mass of an object from its image,” inProceedings of the 1st Annual Conference on Robot Learning, ser. Proceedings of Machine Learning Research, S. Levine, V . Vanhoucke, and K. Goldberg, Eds., vol. 78. PMLR, 13–15 Nov 2017, pp. 324–333. [Online]. Available: https://proceedings.ml...
2017
-
[20]
Physbench: Benchmarking and enhancing vision-language models for physical world understanding,
W. Chow, J. Mao, B. Li, D. Seita, V . Guizilini, and Y . Wang, “Physbench: Benchmarking and enhancing vision-language models for physical world understanding,”arXiv preprint arXiv:2501.16411, 2025
-
[21]
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
J. C.et al.. Anthony Brohan, Noah Brown, “Rt-2: Vision-language- action models transfer web knowledge to robotic control,” 2023. [Online]. Available: https://arxiv.org/abs/2307.15818
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[22]
Vision-language model-based physical reasoning for robot liquid perception,
W. Lai, Y . Gao, and T. L. Lam, “Vision-language model-based physical reasoning for robot liquid perception,” 2024. [Online]. Available: https://arxiv.org/abs/2404.06904
-
[23]
Physvlm: Enabling visual language models to understand robotic physical reachability,
W. Zhou, M. Tao, C. Zhao, H. Guo, H. Dong, M. Tang, and J. Wang, “Physvlm: Enabling visual language models to understand robotic physical reachability,” 2025. [Online]. Available: https://arxiv.org/abs/2503.08481
-
[24]
Robot navigation using physically grounded vision-language models in outdoor environments,
M. Elnoor, K. Weerakoon, G. Seneviratne, R. Xian, T. Guan, M. K. M. Jaffar, V . Rajagopal, and D. Manocha, “Robot navigation using physically grounded vision-language models in outdoor environments,” 2024. [Online]. Available: https://arxiv.org/abs/2409. 20445
2024
-
[25]
Intern-s1: A scientific multimodal foundation model,
Y . C.et al.. Lei Bai, Zhongrui Cai, “Intern-s1: A scientific multimodal foundation model,” 2025. [Online]. Available: https: //arxiv.org/abs/2508.15763
-
[26]
M. S.et al.. Gheorghe Comanici, Eric Bieber, “Gemini 2.5: Pushing the frontier with advanced reasoning, multimodality, long context, and next generation agentic capabilities,” 2025. [Online]. Available: https://arxiv.org/abs/2507.06261
work page internal anchor Pith review Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.