Rolling Shutter Relative Pose Estimation Made Practical
Pith reviewed 2026-06-26 05:38 UTC · model grok-4.3
The pith
Rolling shutter relative pose estimation becomes practical with a solver that needs only seven affine correspondences.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
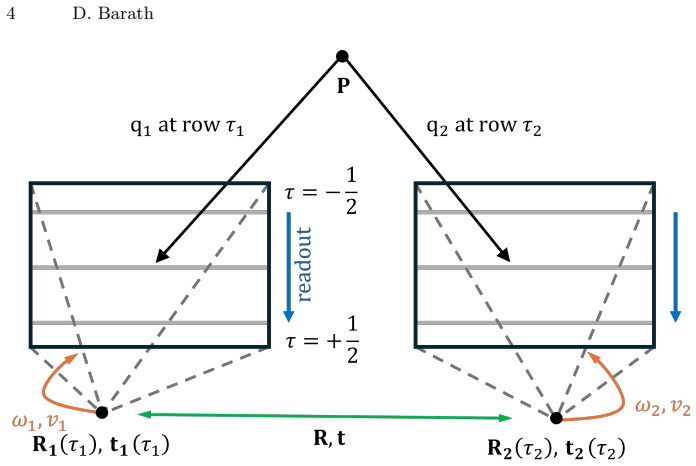
We derive RS-corrected affine constraints that account for the coupling between point perturbations and the row-dependent essential matrix, providing two equations per correspondence beyond the standard epipolar constraint. Building on these constraints, we develop a linearized algebraic solver that estimates pose and RS motion from only 7 ACs. The solver exploits the physical smallness of RS parameters to linearize the constraints, eliminates the 12 RS unknowns via null-space projection, and solves the remaining degree-20 system via action matrices in 1.2 ms. On the TUM RS benchmark the method achieves the best pose and RS parameter accuracy among tested solvers and supplies accurate transl
What carries the argument
RS-corrected affine constraints that couple point perturbations with the row-dependent essential matrix and supply two additional equations per correspondence.
If this is right
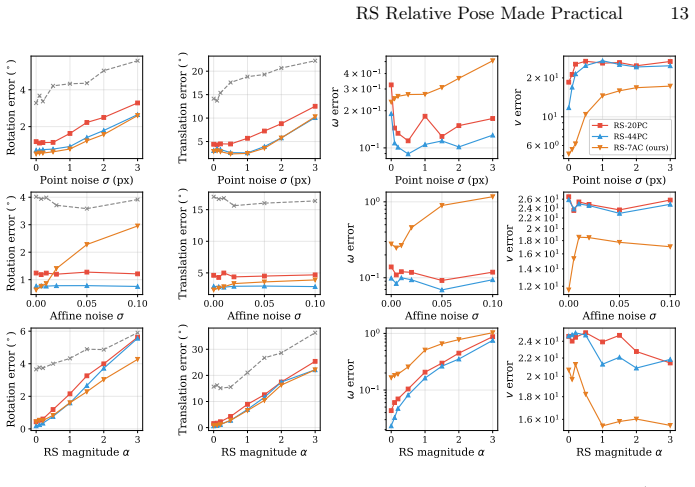
- The solver achieves the best pose and RS parameter accuracy among all tested methods on the TUM RS benchmark.
- It uniquely recovers accurate translational velocity estimates that remain poorly conditioned from point correspondences alone.
- Accuracy remains comparable to the standard five-point algorithm when the same solver is applied to global-shutter data on EuRoC MAV.
- Each solve completes in 1.2 milliseconds, making RANSAC-based robust estimation feasible.
Where Pith is reading between the lines
- The linearization step may extend to other small-parameter camera models such as those with mild radial distortion.
- Accurate per-frame velocity estimates could improve motion prediction inside rolling-shutter video pipelines or visual odometry.
- Lower sample size in RANSAC could allow rolling-shutter geometry to be used inside real-time mobile SLAM systems.
Load-bearing premise
The physical size of rolling-shutter parameters is small enough that linearizing the constraints around them loses negligible accuracy.
What would settle it
Running the seven-affine-correspondence solver on the TUM RS benchmark and checking whether its pose, rolling-shutter parameter, and translational velocity errors are lower than those of prior rolling-shutter solvers while also matching five-point accuracy on the EuRoC global-shutter set.
Figures
read the original abstract
Rolling shutter (RS) cameras equip virtually all consumer devices, yet RS-aware relative pose estimation has remained impractical: the state-of-the-art solver requires a minimum of 20 point correspondences, making RANSAC-based robust estimation prohibitively expensive due to the exponential dependence of the iteration count on the sample size. We make RS relative pose estimation practical by introducing affine correspondences (ACs) into the RS two-view geometry. We derive novel \emph{RS-corrected affine constraints} that account for the coupling between point perturbations and the row-dependent essential matrix, providing two equations per correspondence beyond the standard epipolar constraint. Building on these constraints, we develop a linearized algebraic solver that estimates pose and RS motion from only 7 ACs. The solver exploits the physical smallness of RS parameters to linearize the constraints, eliminates the 12 RS unknowns via null-space projection, and solves the remaining degree-20 system via action matrices in 1.2\,ms. On the TUM RS benchmark, our method achieves the best pose and RS parameter accuracy among all tested methods and, uniquely among RS solvers, provides accurate translational velocity estimates -- which are poorly conditioned from point correspondences alone due to a $\vec{v}$-$\vec{t}$ coupling. On the global-shutter EuRoC MAV dataset, the solver achieves comparable accuracy to the standard 5-point algorithm, demonstrating that it generalizes well to the GS setting. Code is at https://github.com/danini/rolling_shutter_made_practical.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that rolling-shutter relative pose estimation can be made practical by introducing affine correspondences (ACs). It derives novel RS-corrected affine constraints that couple point perturbations to the row-dependent essential matrix, yielding two extra equations per AC beyond the epipolar constraint. These are linearized under the assumption that RS velocities are small, the 12 RS unknowns are eliminated by null-space projection, and the resulting degree-20 system is solved via action matrices from only 7 ACs in 1.2 ms. On the TUM RS benchmark the method reportedly outperforms prior RS solvers in pose and RS-parameter accuracy and uniquely recovers accurate translational velocity; on EuRoC it matches the standard 5-point algorithm.
Significance. If the linearization is valid within the operating regime of real RS sequences, the reduction from 20 to 7 correspondences would make robust RS-aware estimation computationally feasible for the first time, removing a long-standing practical barrier. The public code release and the reported ability to recover translational velocity (normally poorly conditioned from points alone) are concrete strengths that would be cited by follow-up work.
major comments (2)
- [§4] §4 (Linearized algebraic solver): the central linearization drops all quadratic and higher terms in the RS velocities after forming the RS-corrected affine constraints. No remainder bound, perturbation analysis, or numerical check of the neglected terms against correspondence noise is supplied, nor are the actual rotational/translational velocity magnitudes measured on the TUM sequences reported relative to the linearization threshold. Because the accuracy advantage and the translational-velocity recovery both rest on this approximation, the omission is load-bearing.
- [§5.2] §5.2 (TUM RS experiments): the claim that the method “achieves the best pose and RS parameter accuracy among all tested methods” is presented without an ablation that isolates the contribution of the linearization versus the use of ACs. A controlled comparison that re-linearizes a 20-point solver or that reports bias versus ground-truth velocity magnitude would be required to substantiate the superiority.
minor comments (2)
- [§3] The notation for the row-dependent essential matrix and the affine correction terms is introduced without an explicit summary table; a compact notation table would improve readability.
- [§4.3] The action-matrix construction is stated to be degree-20, but the precise monomial basis and the eigenvalue extraction step are not detailed; a short algorithmic box would help readers reproduce the 1.2 ms timing.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate the planned revisions.
read point-by-point responses
-
Referee: [§4] §4 (Linearized algebraic solver): the central linearization drops all quadratic and higher terms in the RS velocities after forming the RS-corrected affine constraints. No remainder bound, perturbation analysis, or numerical check of the neglected terms against correspondence noise is supplied, nor are the actual rotational/translational velocity magnitudes measured on the TUM sequences reported relative to the linearization threshold. Because the accuracy advantage and the translational-velocity recovery both rest on this approximation, the omission is load-bearing.
Authors: We agree that a formal perturbation analysis and remainder bound are absent from the current manuscript. The linearization is motivated by the physical smallness of RS velocities, which is supported by the method's performance on real sequences. In the revision we will add the measured rotational and translational velocity magnitudes on the TUM RS sequences together with a numerical check of the size of the neglected quadratic terms relative to typical correspondence noise. revision: yes
-
Referee: [§5.2] §5.2 (TUM RS experiments): the claim that the method “achieves the best pose and RS parameter accuracy among all tested methods” is presented without an ablation that isolates the contribution of the linearization versus the use of ACs. A controlled comparison that re-linearizes a 20-point solver or that reports bias versus ground-truth velocity magnitude would be required to substantiate the superiority.
Authors: The reported superiority is shown via direct comparison to existing point-based RS solvers on the benchmark. To isolate the linearization contribution we will add, in the revised manuscript, an ablation that reports bias as a function of ground-truth velocity magnitude on the TUM data and, where feasible, a controlled comparison against a re-linearized higher-point formulation. revision: yes
Circularity Check
Derivation chain is self-contained algebraic construction with no circular reductions
full rationale
The paper derives novel RS-corrected affine constraints from the geometry of row-dependent essential matrices and point perturbations, then applies a standard small-parameter linearization (explicitly justified by physical smallness of RS velocities), followed by null-space elimination of the 12 RS unknowns and reduction to a degree-20 action-matrix solver. None of these steps reduce the output to fitted inputs, self-citations, or renamed known results by construction; the linearization is an explicit approximation rather than a data-driven fit, and external benchmark validation (TUM RS, EuRoC) supplies independent content. No load-bearing self-citation or self-definitional loop is present in the provided derivation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Physical smallness of RS parameters permits linearization of the constraints
Reference graph
Works this paper leans on
-
[1]
In: IEEE International Conference on Computer Vision (ICCV)
Ait-Aider, O., Berry, F.: Structure and kinematics triangulation with a rolling shutter stereo rig. In: IEEE International Conference on Computer Vision (ICCV). pp. 1835–1840 (2009).https://doi.org/10.1109/ICCV.2009.5459336
-
[2]
Albl, C., Kukelova, Z., Larsson, V., Pajdla, T.: Rolling shutter camera absolute pose. IEEE Transactions on Pattern Analysis and Machine Intelligence42(6), 1439–1452 (2020).https://doi.org/10.1109/TPAMI.2019.2894395
-
[3]
: Embedded phase shifting: Robust phase shifting with embedded signals
Albl, C., Kukelova, Z., Pajdla, T.: R6P – rolling shutter absolute pose problem. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 2292–2300 (2015).https://doi.org/10.1109/CVPR.2015.7298842
-
[5]
arXiv preprint arXiv:2506.04803 (2025)
Barath, D.: SupeRANSAC: One RANSAC to rule them all. arXiv preprint arXiv:2506.04803 (2025)
arXiv 2025
-
[6]
Pattern Recognition Letters94, 7–14 (2017).https://doi.org/10.1016/j.patrec.2017
Barath, D., Hajder, L.: A theory of point-wise homography estimation. Pattern Recognition Letters94, 7–14 (2017).https://doi.org/10.1016/j.patrec.2017. 05.007 16 D. Barath
-
[7]
IEEE Transactions on Image Processing27(11), 5328–5337 (2018)
Barath, D., Hajder, L.: Efficient recovery of essential matrix from two affine cor- respondences. IEEE Transactions on Image Processing27(11), 5328–5337 (2018). https://doi.org/10.1109/TIP.2018.2849866
-
[8]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Barath, D., Matas, J.: Graph-cut RANSAC. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 6733–6741 (2018).https://doi. org/10.1109/CVPR.2018.00704
-
[9]
In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
Barath, D., Noskova, J., Ivashechkin, M., Matas, J.: MAGSAC++, a fast, reliable and accurate robust estimator. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). pp. 1301–1309 (2020).https://doi.org/10. 1109/CVPR42600.2020.00138
arXiv 2020
-
[10]
In: De Bruijne, M., Cattin, P.C., Cotin, S., Padoy, N., Speidel, S., Zheng, Y., Essert, C
Barath, D., Polic, M., Förstner, W., Sattler, T., Pajdla, T., Kukelova, Z.: Mak- ing affine correspondences work in camera geometry computation. In: European Conference on Computer Vision (ECCV). Lecture Notes in Computer Science, vol. 12356, pp. 723–740. Springer (2020).https://doi.org/10.1007/978-3-030- 58621-8_42
-
[11]
In: IEEE/CVF International Con- ference on Computer Vision (ICCV)
Barroso-Laguna, A., Riba, E., Ponsa, D., Mikolajczyk, K.: Key.net: Keypoint de- tection by handcrafted and learned CNN filters. In: IEEE/CVF International Con- ference on Computer Vision (ICCV). pp. 5836–5844 (2019).https://doi.org/10. 1109/ICCV.2019.00593
arXiv 2019
-
[12]
Computer Vision and Image Understanding122, 105–114 (2014).https://doi
Bentolila,J.,Francos,J.M.:Conicepipolarconstraintsfromaffinecorrespondences. Computer Vision and Image Understanding122, 105–114 (2014).https://doi. org/10.1016/j.cviu.2014.01.003
-
[13]
The International Journal of Robotics Research (IJRR)35(10), 1157–1163 (2016)
Burri, M., Nikolic, J., Gohl, P., Schneider, T., Rehder, J., Omari, S., Achtelik, M.W., Siegwart, R.: The EuRoC micro aerial vehicle datasets. The International Journal of Robotics Research (IJRR)35(10), 1157–1163 (2016)
2016
-
[14]
In: DAGM Sympo- sium on Pattern Recognition
Chum, O., Matas, J., Kittler, J.: Locally optimized RANSAC. In: DAGM Sympo- sium on Pattern Recognition. Lecture Notes in Computer Science, vol. 2781, pp. 236–243. Springer (2003).https://doi.org/10.1007/978-3-540-45243-0_31
-
[15]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Chum, O., Matas, J.: Matching with PROSAC – progressive sample consensus. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 220–226 (2005).https://doi.org/10.1109/CVPR.2005.221
-
[16]
A Piecewise Rotation of the Circle, IPR Maps and Their Connection with Translation Surfaces
Cox,D.A.,Little,J.,O’Shea,D.:Ideals,Varieties,andAlgorithms:AnIntroduction to Computational Algebraic Geometry and Commutative Algebra. Undergraduate Texts in Mathematics, Springer, 4th edn. (2015).https://doi.org/10.1007/978- 3-319-16721-3
-
[17]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Dai, Y., Li, H., Kneip, L.: Rolling shutter camera relative pose: Generalized epipo- lar geometry. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 4132–4140 (2016).https://doi.org/10.1109/CVPR.2016.448
-
[18]
In: IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR)
Edstedt, J., Sun, Q., Bökman, G., Wadenbäck, M., Felsberg, M.: RoMa: Robust dense feature matching. In: IEEE/CVF Conference on Computer Vision and Pat- tern Recognition (CVPR). pp. 19790–19800 (2024).https://doi.org/10.1109/ CVPR52733.2024.01871
arXiv 2024
-
[19]
Communi- cations of the ACM24(6), 381–395 (1981).https://doi.org/10.1145/358669
Fischler, M.A., Bolles, R.C.: Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Communi- cations of the ACM24(6), 381–395 (1981).https://doi.org/10.1145/358669. 358692
-
[20]
RLAIF-V: open-source AI feedback leads to super GPT-4V trustworthiness
Hahn, M.A., Kohn, K., Marigliano, O., Pajdla, T.: Order-one rolling shutter cam- eras. In: IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). pp. 27007–27016 (2025).https://doi.org/10.1109/CVPR52734.2025. 02515 RS Relative Pose Made Practical 17
-
[21]
In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR)
Hedborg, J., Forssén, P.E., Felsberg, M., Ringaby, E.: Rolling shutter bundle adjustment. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 1434–1441 (2012).https://doi.org/10.1109/CVPR.2012.6247831
-
[22]
In: IEEE/CVF International Conference on Computer Vision (ICCV) (2025)
Hruby, P., Pollefeys, M.: Single-scanline relative pose estimation for rolling shutter cameras. In: IEEE/CVF International Conference on Computer Vision (ICCV) (2025)
2025
-
[23]
In: European Conference on Computer Vision (ECCV)
Kukelova, Z., Bujnak, M., Pajdla, T.: Automatic generator of minimal problem solvers. In: European Conference on Computer Vision (ECCV). Lecture Notes in Computer Science, vol. 5304, pp. 302–315. Springer (2008)
2008
-
[24]
arXiv preprint arXiv:1904.06770 (2019)
Lee, C.R., Yoon, J.H., Park, M.G., Yoon, K.J.: Gyroscope-aided relative pose es- timation for rolling shutter cameras. arXiv preprint arXiv:1904.06770 (2019)
Pith/arXiv arXiv 1904
-
[25]
In: 6th Workshop on Omnidirectional Vision, Camera Networks and Non-Classical Cameras (OMNIVIS) (2005)
Meingast, M., Geyer, C., Sastry, S.: Geometric models of rolling-shutter cameras. In: 6th Workshop on Omnidirectional Vision, Camera Networks and Non-Classical Cameras (OMNIVIS) (2005)
2005
-
[26]
Mikolajczyk, K., Schmid, C.: Scale & affine invariant interest point detectors. In- ternational Journal of Computer Vision60(1), 63–86 (2004).https://doi.org/ 10.1023/B:VISI.0000027790.02288.f2
-
[27]
In: Advances in Neural Infor- mation Processing Systems (NeurIPS)
Mishchuk, A., Mishkin, D., Radenović, F., Matas, J.: Working hard to know your neighbor’s margins: Local descriptor learning loss. In: Advances in Neural Infor- mation Processing Systems (NeurIPS). pp. 4826–4837 (2017)
2017
-
[28]
Lecture Notes in Computer Science, vol
Mishkin, D., Radenović, F., Matas, J.: Repeatability is not enough: Learning affine regionsviadiscriminability.In:EuropeanConferenceonComputerVision(ECCV). Lecture Notes in Computer Science, vol. 11213, pp. 284–300. Springer (2018)
2018
-
[29]
IEEE Transactions on Pattern Analysis and Machine Intelligence26(6), 756–770 (2004)
Nistér, D.: An efficient solution to the five-point relative pose problem. IEEE Transactions on Pattern Analysis and Machine Intelligence26(6), 756–770 (2004). https://doi.org/10.1109/TPAMI.2004.17
-
[30]
In: International Conference on Pattern Recognition (ICPR)
Perdoch, M., Matas, J., Chum, O.: Epipolar geometry from two correspondences. In: International Conference on Pattern Recognition (ICPR). vol. 4, pp. 215–219 (2006).https://doi.org/10.1109/ICPR.2006.497
-
[31]
Deep Residual Learning for Image Recognition
Raposo, C., Barreto, J.P.: Theory and practice of structure-from-motion using affine correspondences. In: IEEE Conference on Computer Vision and Pattern Recognition (CVPR). pp. 5470–5478 (2016).https://doi.org/10.1109/CVPR. 2016.590
-
[32]
Saurer, O., Pollefeys, M., Lee, G.H.: A minimal solution to the rolling shutter pose estimation problem. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 1328–1334 (2015).https://doi.org/10.1109/IROS. 2015.7353540
-
[33]
Schubert, D., Demmel, N., von Stumberg, L., Usenko, V., Cremers, D.: Rolling- shutter modelling for direct visual-inertial odometry. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 2462–2469 (2019). https://doi.org/10.1109/IROS40897.2019.8968539
-
[34]
Sun, P., Guan, B., Yu, Z., Shang, Y., Yu, Q., Barath, D.: Learning affine corre- spondencesbyintegratinggeometricconstraints.In:ProceedingsoftheIEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 27038–27048 (2025)
2025
-
[35]
In: IEEE International Conference on Computer Vision (ICCV)
Zhuang, B., Cheong, L.F., Lee, G.H.: Rolling-shutter-aware differential SfM and image rectification. In: IEEE International Conference on Computer Vision (ICCV). pp. 948–956 (2017).https://doi.org/10.1109/ICCV.2017.108
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.