A Backstepping Framework for Unconstrained Accelerated Optimization Algorithms
Pith reviewed 2026-06-29 03:51 UTC · model grok-4.3
The pith
A backstepping framework on augmented strict-feedback systems unifies accelerated optimization algorithms and recovers Nesterov and PID flows as corollaries.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that modeling optimization as the augmented strict-feedback system with dynamics ˙x_{1} = x_{2}, ˙x_{2} = u, ˙z = q(x_{1}, z) and output y = abla f(x_{1}) allows backstepping to synthesize feedback laws that ensure y(t) o 0 for convex f; the resulting unified framework recovers the constant-parameter Nesterov flow and the PID accelerated optimizer as direct corollaries, establishes conditional inverse optimality of the second-step law with respect to the induced outer-tracking problem, and elevates the optimality principle to the virtual-control stage through a formal optimal-backstepping theorem based on a reduced Hamilton-Jacobi-Bellman problem.
What carries the argument
The augmented strict-feedback system ˙x_{1} = x_{2}, ˙x_{2} = u, ˙z = q(x_{1}, z) with regulated output y = abla f(x_{1}), on which backstepping recursion designs the input u after selecting a virtual control.
If this is right
- The framework recovers the constant-parameter Nesterov flow as a direct corollary.
- The framework recovers the PID accelerated optimizer as a direct corollary.
- For any fixed virtual control the second-step law is inverse optimal with respect to the induced outer-tracking problem.
- The optimal-backstepping theorem reduces the optimality question to solving a reduced Hamilton-Jacobi-Bellman problem at the virtual-control stage.
Where Pith is reading between the lines
- Varying the virtual-control choice within the same framework could produce new accelerated algorithms not previously studied.
- The modeling approach may allow other nonlinear control techniques such as adaptive or sliding-mode designs to be transferred to optimization.
- Discretization of the continuous-time laws generated here could yield new discrete accelerated methods whose convergence follows from the continuous analysis.
- The conditional character of optimality implies that achieving globally optimal backstepping designs requires attention to the virtual-control selection step.
Load-bearing premise
The objective functions are convex.
What would settle it
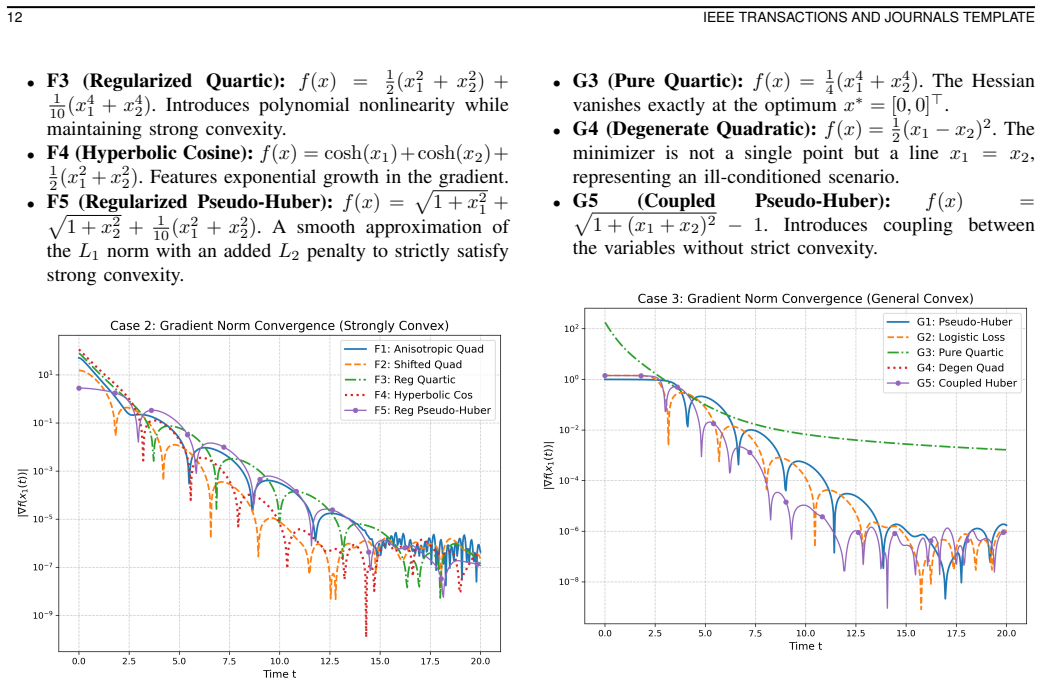
A convex function for which any algorithm obtained from the backstepping synthesis fails to drive the gradient to zero would falsify the convergence claims.
Figures

read the original abstract
This paper introduces a control-theoretic perspective on unconstrained optimization algorithms using the backstepping methods. We model the optimization process as an augmented strict-feedback system given by $\dot{x}_1 = x_2$, $\dot{x}_2 = u$, and $\dot{z} = q(x_1,z)$, with a regulated output $y = \nabla f(x_1)$. This formulation recasts the development of unconstrained optimization algorithms as a feedback control problem, where the goal is to design the input $u$ to ensure $y(t) \to 0$. By employing backstepping, we recursively synthesize the actual feedback law $u$ after initially selecting a virtual control for $x_1$. For convex objective functions, we develop a general synthesis framework for augmented strict-feedback systems and specialize it to the standard strict-feedback case. This unified framework successfully recovers the constant-parameter Nesterov flow and the proportional-integral-derivative (PID) accelerated optimizer as direct corollaries. We further establish that, given a fixed virtual control, the universal second-step law is inverse optimal with respect to an induced outer-tracking problem. This reveals that the optimality of the control law is conditionally dependent on the target manifold prescribed by the virtual control, rather than holding globally across all possible backstepping designs. Finally, we formulate a formal optimal-backstepping theorem that elevates this optimality principle to the virtual-control stage by solving a reduced Hamilton--Jacobi--Bellman problem. These contributions collectively yield a robust and general backstepping-driven paradigm for the analysis and design of continuous-time unconstrained optimization algorithms.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
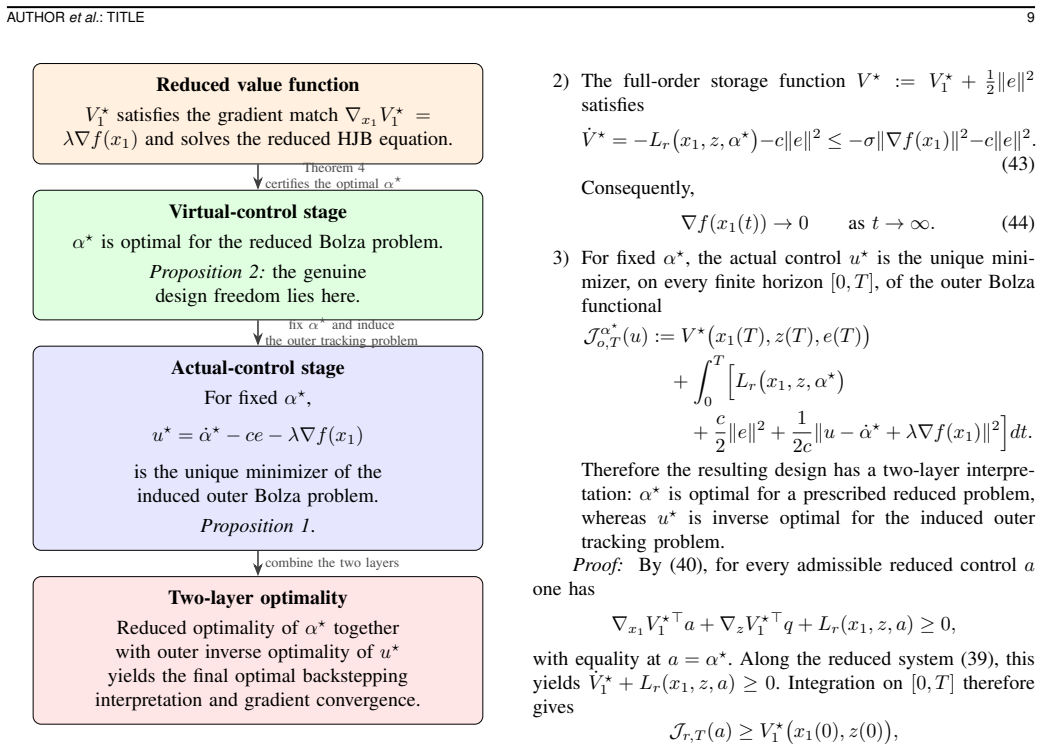
Summary. The manuscript develops a backstepping-based control design for continuous-time unconstrained optimization. It models the problem as the augmented strict-feedback system ˙x_{1} = x_{2}, ˙x_{2} = u, ˙z = q(x_{1},z) with regulated output y = abla f(x_{1}), and for convex f constructs a general synthesis procedure that recovers the constant-parameter Nesterov flow and a PID accelerated optimizer as direct corollaries. The paper further shows that the universal second-step law is inverse optimal with respect to an induced outer-tracking problem (conditional on the choice of virtual control) and states a formal optimal-backstepping theorem obtained by solving a reduced Hamilton–Jacobi–Bellman problem.
Significance. If the derivations are correct, the work supplies a systematic control-theoretic route to accelerated optimization flows, with the explicit recovery of known methods as corollaries and the conditional (rather than global) inverse-optimality result constituting clear strengths. The framework could support the design of new algorithms whose convergence properties follow from the backstepping construction rather than ad-hoc Lyapunov arguments.
minor comments (3)
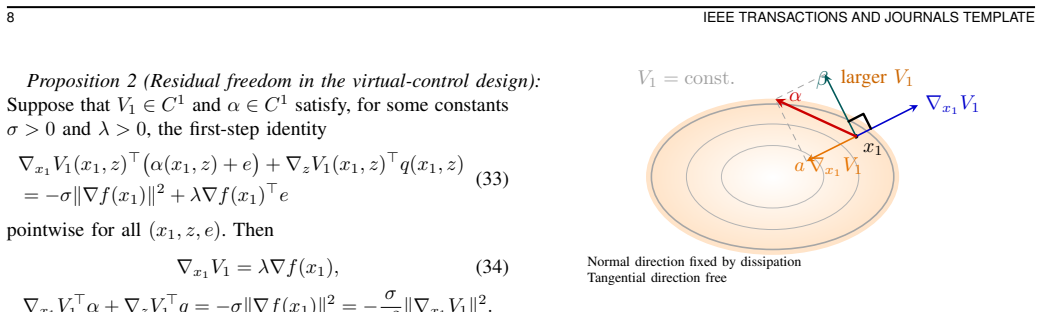
- [§2] §2, after Eq. (3): the precise regularity assumptions placed on the virtual control α(x_{1},z) when passing from the augmented to the standard strict-feedback case should be stated explicitly, as they are used in the subsequent corollaries.
- [§4.2] §4.2, Theorem 2: the statement that the second-step law is 'universal' would benefit from a short remark clarifying whether the same expression applies unchanged when the virtual control is itself time-varying.
- [Introduction] Notation: the symbol q(x_{1},z) is introduced without an immediate example; providing the concrete form used for the Nesterov recovery in the same paragraph would improve readability.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of the manuscript, the recognition of its contributions in recovering Nesterov and PID flows as corollaries, and the recommendation for minor revision. No specific major comments appear under the MAJOR COMMENTS section of the report.
Circularity Check
No significant circularity; derivation is constructive and self-contained
full rationale
The paper applies standard backstepping to an augmented strict-feedback system model of optimization, deriving a general synthesis framework under the explicit convexity assumption on f. Known algorithms (constant-parameter Nesterov flow, PID optimizer) are recovered as special cases/corollaries of this framework rather than being used to define or fit the framework itself. Optimality statements are explicitly conditioned on the choice of virtual control and target manifold, with no self-citation chains, fitted inputs renamed as predictions, or self-definitional reductions visible in the stated construction. The approach is a design procedure whose outputs match known flows by specialization, not by constructional equivalence to inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Objective functions are convex
Reference graph
Works this paper leans on
-
[1]
PIDNet: A real-time semantic segmentation network inspired by PID controllers
Jiacong Xu, Zixiang Xiong, and Shankar P Bhattacharyya. PIDNet: A real-time semantic segmentation network inspired by PID controllers. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 19529–19539, 2023
2023
-
[2]
Adding conditional control to text-to-image diffusion models
Lvmin Zhang, Anyi Rao, and Maneesh Agrawala. Adding conditional control to text-to-image diffusion models. InProceedings of the IEEE/CVF international conference on computer vision, pages 3836– 3847, 2023
2023
-
[3]
Efficiently modeling long sequences with structured state spaces
Albert Gu, Karan Goel, and Christopher Re. Efficiently modeling long sequences with structured state spaces. InInternational Conference on Learning Representations, 2022
2022
-
[4]
Mamba: Linear-time sequence modeling with selective state spaces
Albert Gu and Tri Dao. Mamba: Linear-time sequence modeling with selective state spaces. InFirst Conference on Language Modeling, 2024
2024
-
[5]
Accelerated optimization in deep learning with a proportional- integral-derivative controller.Nature Communications, 15(1):10263, 2024
Song Chen, Jiaxu Liu, Pengkai Wang, Chao Xu, Shengze Cai, and Jian Chu. Accelerated optimization in deep learning with a proportional- integral-derivative controller.Nature Communications, 15(1):10263, 2024
2024
-
[6]
Optimization algorithms as robust feedback controllers
Adrian Hauswirth, Zhiyu He, Saverio Bolognani, Gabriela Hug, and Florian D ¨orfler. Optimization algorithms as robust feedback controllers. Annual Reviews in Control, 57:100941, 2024
2024
-
[7]
Some methods of speeding up the convergence of iteration methods.Ussr Computational Mathematics and Mathematical Physics, 4(5):1–17, 1964
Boris T Polyak. Some methods of speeding up the convergence of iteration methods.Ussr Computational Mathematics and Mathematical Physics, 4(5):1–17, 1964
1964
-
[8]
A method of solving a convex programming problem with convergence rateO(1/k 2).Proceedings of the USSR Academy of Sciences, 269:3
Y Nesterov. A method of solving a convex programming problem with convergence rateO(1/k 2).Proceedings of the USSR Academy of Sciences, 269:3
-
[9]
Analysis and design of optimization algorithms via integral quadratic constraints
Laurent Lessard, Benjamin Recht, and Andrew Packard. Analysis and design of optimization algorithms via integral quadratic constraints. SIAM Journal on Optimization, 26(1):57–95, 2016
2016
-
[10]
Analysis of optimization algorithms via integral quadratic constraints: Nonstrongly convex problems.SIAM Journal on Optimiza- tion, 28(3):2654–2689, 2018
Mahyar Fazlyab, Alejandro Ribeiro, Manfred Morari, and Victor M Preciado. Analysis of optimization algorithms via integral quadratic constraints: Nonstrongly convex problems.SIAM Journal on Optimiza- tion, 28(3):2654–2689, 2018
2018
-
[11]
Dissipativity theory for Nesterov’s accelerated method
Bin Hu and Laurent Lessard. Dissipativity theory for Nesterov’s accelerated method. InInternational Conference on Machine Learning, pages 1549–1557. PMLR, 2017
2017
-
[12]
The analysis of optimization algorithms: A dissipativity approach.IEEE Control Systems Magazine, 42(3):58–72, 2022
Laurent Lessard. The analysis of optimization algorithms: A dissipativity approach.IEEE Control Systems Magazine, 42(3):58–72, 2022
2022
-
[13]
A Lyapunov analysis of accelerated methods in optimization.Journal of Machine Learning Research, 22(113):1–34, 2021
Ashia C Wilson, Benjamin Recht, and Michael I Jordan. A Lyapunov analysis of accelerated methods in optimization.Journal of Machine Learning Research, 22(113):1–34, 2021
2021
-
[14]
The connections between Lyapunov functions for some optimization algorithms and dif- ferential equations.SIAM Journal on Numerical Analysis, 59(3):1542– 1565, 2021
Jes ´us Mar´ıa Sanz Serna and Konstantinos C Zygalakis. The connections between Lyapunov functions for some optimization algorithms and dif- ferential equations.SIAM Journal on Numerical Analysis, 59(3):1542– 1565, 2021
2021
-
[15]
PID controller-based stochastic optimization acceleration for deep neural networks.IEEE Transactions on Neural Networks and Learning Systems, 31(12):5079–5091, 2020
Haoqian Wang, Yi Luo, Wangpeng An, Qingyun Sun, Jun Xu, and Lei Zhang. PID controller-based stochastic optimization acceleration for deep neural networks.IEEE Transactions on Neural Networks and Learning Systems, 31(12):5079–5091, 2020
2020
-
[16]
A differential equation for modeling Nesterov’s accelerated gradient method: Theory and insights.Journal of Machine Learning Research, 17(153):1–43, 2016
Weijie Su, Stephen Boyd, and Emmanuel J Candes. A differential equation for modeling Nesterov’s accelerated gradient method: Theory and insights.Journal of Machine Learning Research, 17(153):1–43, 2016
2016
-
[17]
A variational perspective on accelerated methods in optimization.Proceedings of the National Academy of Sciences, 113(47):E7351–E7358, 2016
Andre Wibisono, Ashia C Wilson, and Michael I Jordan. A variational perspective on accelerated methods in optimization.Proceedings of the National Academy of Sciences, 113(47):E7351–E7358, 2016
2016
-
[18]
From differential equation solvers to accelerated first-order methods for convex optimization.Mathematical Programming, 195(1):735–781, 2022
Hao Luo and Long Chen. From differential equation solvers to accelerated first-order methods for convex optimization.Mathematical Programming, 195(1):735–781, 2022
2022
-
[19]
Fixed-time stable gradient flows: Applications to continuous-time optimization.IEEE Transactions on Automatic Control, 66(5):2002–2015, 2020
Kunal Garg and Dimitra Panagou. Fixed-time stable gradient flows: Applications to continuous-time optimization.IEEE Transactions on Automatic Control, 66(5):2002–2015, 2020
2002
-
[20]
Understanding the acceleration phenomenon via high-resolution differential equations
Bin Shi, Simon S Du, Michael I Jordan, and Weijie J Su. Understanding the acceleration phenomenon via high-resolution differential equations. Mathematical Programming, 195(1):79–148, 2022
2022
-
[21]
A dynamical systems perspec- tive on Nesterov acceleration
Michael Muehlebach and Michael Jordan. A dynamical systems perspec- tive on Nesterov acceleration. InInternational Conference on Machine Learning, pages 4656–4662. PMLR, 2019
2019
-
[22]
Hamiltonian descent methods.arXiv preprint arXiv:1809.05042, 2018
Chris J Maddison, Daniel Paul, Lester Mackey, and Arnaud Doucet. Hamiltonian descent methods.arXiv preprint arXiv:1809.05042, 2018
Pith/arXiv arXiv 2018
-
[23]
Optimization with momen- tum: Dynamical, control-theoretic, and symplectic perspectives.Journal of Machine Learning Research, 22(73):1–50, 2021
Michael Muehlebach and Michael I Jordan. Optimization with momen- tum: Dynamical, control-theoretic, and symplectic perspectives.Journal of Machine Learning Research, 22(73):1–50, 2021
2021
-
[24]
Continuous-time accelerated methods via a hybrid control lens.IEEE Transactions on Automatic Control, 65(8):3425–3440, 2019
Arman Sharifi Kolarijani, Peyman Mohajerin Esfahani, and Tam ´as Keviczky. Continuous-time accelerated methods via a hybrid control lens.IEEE Transactions on Automatic Control, 65(8):3425–3440, 2019
2019
-
[25]
Output feedback-based continuous-time distributed PID optimization algorithms.IEEE Transactions on Network Science and Engineering, 12(2):955–969, 2024
Jiaxu Liu, Song Chen, Pengkai Wang, Shengze Cai, Chao Xu, and Jian Chu. Output feedback-based continuous-time distributed PID optimization algorithms.IEEE Transactions on Network Science and Engineering, 12(2):955–969, 2024
2024
-
[26]
A proposal on centralised and distributed optimisation via proportional–integral– derivative controllers (PID) control perspective.IET Cyber-Systems and Robotics, 5(4):e12100, 2023
Jiaxu Liu, Song Chen, Shengze Cai, and Chao Xu. A proposal on centralised and distributed optimisation via proportional–integral– derivative controllers (PID) control perspective.IET Cyber-Systems and Robotics, 5(4):e12100, 2023
2023
-
[27]
Distributed optimization algorithm design and analysis on cooperation- competition network based on PID control.Journal of the Franklin Institute, 363(5):108483, 2026
Jiaxu Liu, Pengkai Wang, Song Chen, Shengze Cai, and Chao Xu. Distributed optimization algorithm design and analysis on cooperation- competition network based on PID control.Journal of the Franklin Institute, 363(5):108483, 2026
2026
-
[28]
On constrained steady-state regulation: Dynamic KKT controllers.IEEE Transactions on Automatic Control, 54(9):2250–2254, 2009
Andrej Jokic, Mircea Lazar, and Paul PJ van den Bosch. On constrained steady-state regulation: Dynamic KKT controllers.IEEE Transactions on Automatic Control, 54(9):2250–2254, 2009
2009
-
[29]
Control-barrier-function-based de- sign of gradient flows for constrained nonlinear programming.IEEE Transactions on Automatic Control, 69(6):3499–3514, 2023
Ahmed Allibhoy and Jorge Cort ´es. Control-barrier-function-based de- sign of gradient flows for constrained nonlinear programming.IEEE Transactions on Automatic Control, 69(6):3499–3514, 2023
2023
-
[30]
Runyu Zhang, Arvind Raghunathan, Jeff Shamma, and Na Li. Con- strained optimization from a control perspective via feedback lineariza- tion.arXiv preprint arXiv:2503.12665, 2025
arXiv 2025
-
[31]
A new framework for constrained optimization via feedback control of Lagrange multipliers.IEEE Transactions on Automatic Control, 2025
Vito Cerone, Sophie M Fosson, Simone Pirrera, and Diego Regruto. A new framework for constrained optimization via feedback control of Lagrange multipliers.IEEE Transactions on Automatic Control, 2025
2025
-
[32]
Regularity proper- ties of optimization-based controllers.European Journal of Control, 81:101098, 2025
Pol Mestres, Ahmed Allibhoy, and Jorge Cort ´es. Regularity proper- ties of optimization-based controllers.European Journal of Control, 81:101098, 2025
2025
-
[33]
Fast convergence of inertial dynamics and algorithms with asymptotic vanishing viscosity.Mathematical Programming, 168(1):123–175, 2018
Hedy Attouch, Zaki Chbani, Juan Peypouquet, and Patrick Redont. Fast convergence of inertial dynamics and algorithms with asymptotic vanishing viscosity.Mathematical Programming, 168(1):123–175, 2018
2018
-
[34]
Nonlinear and Adaptive Control Design
Miroslav Krstic, Petar V Kokotovic, and Ioannis Kanellakopoulos. Nonlinear and Adaptive Control Design. John Wiley & Sons, Inc., 1995. 14 IEEE TRANSACTIONS AND JOURNALS TEMPLATE
1995
-
[35]
Academic Press, 2020
Sundarapandian Vaidyanathan and Ahmad Taher Azar.Backstepping Control of Nonlinear Dynamical Systems. Academic Press, 2020
2020
-
[36]
Event-triggered output-feedback backstep- ping control of sandwich hyperbolic PDE systems.IEEE Transactions on Automatic Control, 67(1):220–235, 2021
Ji Wang and Miroslav Krstic. Event-triggered output-feedback backstep- ping control of sandwich hyperbolic PDE systems.IEEE Transactions on Automatic Control, 67(1):220–235, 2021
2021
-
[37]
Inverse optimality in robust stabilization.SIAM Journal on Control and Optimization, 34(4):1365– 1391, 1996
Randy A Freeman and Petar V Kokotovic. Inverse optimality in robust stabilization.SIAM Journal on Control and Optimization, 34(4):1365– 1391, 1996
1996
-
[38]
Stochastic nonlinear prescribed-time stabilization and inverse optimality.IEEE Transactions on Automatic Control, 67(3):1179–1193, 2021
Wuquan Li and Miroslav Krstic. Stochastic nonlinear prescribed-time stabilization and inverse optimality.IEEE Transactions on Automatic Control, 67(3):1179–1193, 2021
2021
-
[39]
Springer Science & Business Media, 2013
Yurii Nesterov.Introductory Lectures on Convex Optimization: A Basic Course, volume 87. Springer Science & Business Media, 2013
2013
-
[40]
Prentice hall Upper Saddle River, NJ, 2002
Hassan K Khalil and Jessy W Grizzle.Nonlinear Systems, volume 3. Prentice hall Upper Saddle River, NJ, 2002
2002
-
[41]
Inverse optimal design of input-to- state stabilizing nonlinear controllers.IEEE Transactions on Automatic Control, 43(3):336–350, 1998
Miroslav Krstic and Zhong-Hua Li. Inverse optimal design of input-to- state stabilizing nonlinear controllers.IEEE Transactions on Automatic Control, 43(3):336–350, 1998. Song Chenreceived the Ph.D. degree in oper- ational research and cybernetics from Zhejiang University, Hangzhou, China, in 2025. He is currently a Research Fellow with the Department of ...
1998
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.