FormIDEAble: Safe and Socially-aware Autonomous Systems
Pith reviewed 2026-07-01 04:37 UTC · model grok-4.3
The pith
FormIDEAble models human-autonomous cooperation as a priced timed Markov decision process to synthesize strategies that meet both social awareness and formal safety constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
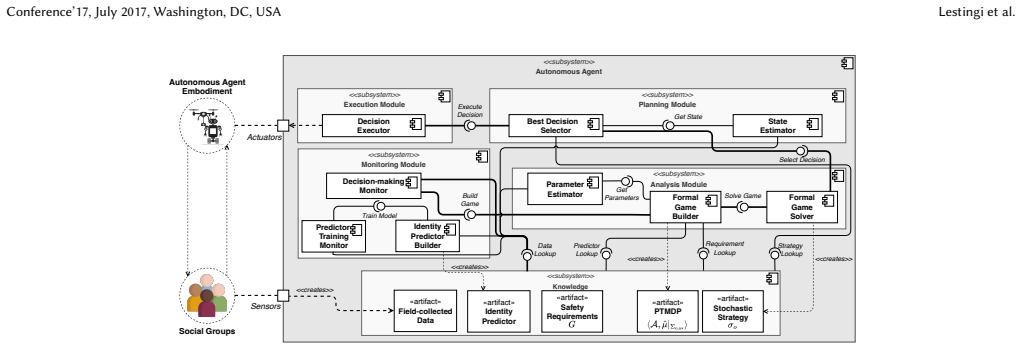
FormIDEAble models the cooperation between humans and the autonomous agent as a Priced Timed Markov Decision Process and formulates decision-making as a cost-bounded reachability problem to synthesize socially-aware cooperation strategies with safety guarantees, illustrated through an emergency evacuation scenario where initial experiments show effectiveness alongside optimization-safety trade-offs.
What carries the argument
Priced Timed Markov Decision Process that encodes timing, probabilistic transitions for human actions, and costs, enabling synthesis of strategies via cost-bounded reachability queries that enforce both social and safety properties.
If this is right
- Strategies can be produced that simultaneously address social dynamics and formal safety requirements.
- Trade-offs between optimization objectives and safety bounds become quantifiable within the same model.
- The method supplies a foundation for assured decision-making in other socio-critical autonomous systems.
- Formal verification of cooperation plans becomes possible before deployment in uncertain human environments.
Where Pith is reading between the lines
- The same modeling choice could support online replanning when new observations update the human behavior probabilities.
- Integration with sensor data streams might allow the reachability queries to run repeatedly during operation.
- The framework could be tested against real human subject data from controlled evacuation drills to check model fidelity.
Load-bearing premise
Human behavior in socio-critical settings can be adequately captured by a priced timed Markov decision process so that resulting strategies satisfy both social awareness and formal safety constraints at once.
What would settle it
A concrete evacuation simulation or trial in which a synthesized strategy violates a stated safety constraint while the model had predicted the constraint would hold.
Figures



read the original abstract
Autonomous agents operating in socio-critical settings must coordinate with humans under uncertainty while respecting explicit safety constraints. Existing approaches either account for social dynamics without formal guarantees or provide formal assurance while abstracting away human behaviour. We introduce FormIDEAble, a formally grounded approach for synthesising socially-aware cooperation strategies with safety guarantees. The cooperation between humans and the autonomous agent is modelled as a Priced Timed Markov Decision Process, and decision-making is formulated as a cost-bounded reachability problem. We illustrate the approach using an emergency evacuation scenario. Initial experimental evidence demonstrates the effectiveness of the approach and highlights the trade-offs between optimisation and safety guarantees. FormIDEAble provides a principled foundation for formally assured, socially-aware decision-making in socio-critical systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces FormIDEAble, a formally grounded approach for synthesizing socially-aware cooperation strategies with safety guarantees. Human-autonomous agent cooperation is modeled as a Priced Timed Markov Decision Process, with decision-making cast as a cost-bounded reachability problem. The method is illustrated on an emergency evacuation scenario and supported by initial experimental evidence of effectiveness together with trade-offs between optimization and safety.
Significance. If the PTMDP construction and reachability formulation can be shown to deliver the claimed simultaneous social awareness and formal safety guarantees, the work would address a recognized gap between purely social and purely formal approaches to autonomous systems. The priced-timed MDP modeling choice and the evacuation case study are concrete starting points, but the absence of any derivations, proofs, or data prevents assessment of whether the central claims hold.
major comments (3)
- [Abstract] Abstract: the claim of 'initial experimental evidence' demonstrating effectiveness is unsupported because the manuscript contains no experimental setup, metrics, results, tables, or analysis; this is load-bearing for the effectiveness assertion.
- [Abstract] Abstract: no definition of the Priced Timed Markov Decision Process, no transition or cost functions, and no formulation of the cost-bounded reachability problem or its solution algorithm are supplied, so the safety guarantees cannot be verified.
- [Abstract] Abstract: the modeling assumption that human behavior in socio-critical settings is adequately captured by a PTMDP is stated without justification, validation against human data, or sensitivity analysis; a concrete test would require comparing synthesized strategies to observed human trajectories in the evacuation scenario.
Simulated Author's Rebuttal
We thank the referee for their thorough review and constructive comments. We provide point-by-point responses to the major comments below and outline the revisions we intend to make.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of 'initial experimental evidence' demonstrating effectiveness is unsupported because the manuscript contains no experimental setup, metrics, results, tables, or analysis; this is load-bearing for the effectiveness assertion.
Authors: We agree with the referee that the manuscript does not include a formal experimental setup, metrics, results, tables, or analysis. The phrase 'initial experimental evidence' in the abstract was meant to refer to the illustrative example in the evacuation scenario. To correct this, we will revise the abstract to state that the approach is illustrated using an emergency evacuation scenario, without claiming experimental evidence of effectiveness. This revision will be incorporated in the next version of the manuscript. revision: yes
-
Referee: [Abstract] Abstract: no definition of the Priced Timed Markov Decision Process, no transition or cost functions, and no formulation of the cost-bounded reachability problem or its solution algorithm are supplied, so the safety guarantees cannot be verified.
Authors: The current manuscript provides only a high-level description in the abstract. We acknowledge that detailed definitions, functions, and the solution algorithm are not supplied, which prevents verification of the safety guarantees from the abstract alone. In the revised manuscript, we will add concise definitions of the PTMDP, the transition and cost functions, the cost-bounded reachability formulation, and an outline of the solution algorithm directly into the abstract to support the claims. revision: yes
-
Referee: [Abstract] Abstract: the modeling assumption that human behavior in socio-critical settings is adequately captured by a PTMDP is stated without justification, validation against human data, or sensitivity analysis; a concrete test would require comparing synthesized strategies to observed human trajectories in the evacuation scenario.
Authors: We concur that the modeling choice requires additional justification. The revised manuscript will include a dedicated discussion justifying the use of PTMDP for modeling human-agent cooperation, drawing on relevant literature. We will also explicitly note the absence of validation against human data and sensitivity analysis as a current limitation, and outline plans for future work involving comparison to observed human trajectories. revision: yes
Circularity Check
No significant circularity
full rationale
The paper presents FormIDEAble as a modeling choice: cooperation is modelled as a Priced Timed Markov Decision Process and decision-making is formulated as a cost-bounded reachability problem. No equations, fitted parameters, predictions, or derivation steps appear in the provided abstract or description. The central claim is an explicit modeling assumption rather than a result derived from prior quantities within the paper. No self-citations, ansatzes, or reductions to inputs are visible, so the approach is self-contained against external benchmarks with no detectable circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Dhaminda B. Abeywickrama, Amel Bennaceur, Greg Chance, Yiannis Demiris, Anastasia Kordoni, Mark Levine, Luke Moffat, Luc Moreau, Mohammad Reza Mousavi, Bashar Nuseibeh, Subramanian Ramamoorthy, Jan Oliver Ringert, James Wilson, Shane Windsor, and Kerstin Eder. 2024. On Specifying for Trustworthi- ness.Commun. ACM67, 1 (2024), 98–109. doi:10.1145/3624699
-
[2]
Malik Almaliki, Funmilade Faniyi, Rami Bahsoon, Keith Phalp, and Raian Ali
-
[3]
Requirements-Driven Social Adaptation: Expert Survey. InRequirements Engineering: Foundation for Software Quality - 20th International Working Confer- ence, REFSQ 2014, Essen, Germany, April 7-10, 2014. Proceedings (Lecture Notes in Computer Science, Vol. 8396). Springer, 72–87. doi:10.1007/978-3-319-05843-6_6
-
[4]
Luciano Baresi, Matteo Camilli, Tommaso Dolci, and Giovanni Quattrocchi. 2024. A Conceptual Framework for Quality Assurance of LLM-based Socio-critical Sys- tems. InProceedings of the 39th IEEE/ACM International Conference on Automated Software Engineering. 2314–2318
2024
-
[5]
Price, Arosha K
Amel Bennaceur, Avelie Stuart, Blaine A. Price, Arosha K. Bandara, Mark Levine, Linda Clare, Jessica Cohen, Ciaran McCormick, Vikram Mehta, Mohamed Ben- nasar, Daniel Gooch, Carlos Gavidia-Calderon, Anastasia Kordoni, and Bashar Nuseibeh. 2023. Socio-Technical Resilience for Community Healthcare. InTAS. ACM, 26:1–26:6
2023
-
[6]
Bersani, Matteo Camilli, Livia Lestingi, Raffaela Mirandola, Matteo G
Marcello M. Bersani, Matteo Camilli, Livia Lestingi, Raffaela Mirandola, Matteo G. Rossi, and Patrizia Scandurra. 2023. Towards Better Trust in Human-Machine Teaming through Explainable Dependability. In20th International Conference on Software Architecture, ICSA 2023 - Companion, L’Aquila, Italy, March 13-17, 2023. IEEE, 86–90. doi:10.1109/ICSA-C57050.2023.00029
-
[7]
Andreea Bobu, Dexter R. R. Scobee, Jaime F. Fisac, S. Shankar Sastry, and Anca D. Dragan. 2020. LESS is More: Rethinking Probabilistic Models of Human Behavior. InIntl. Conf. on Human-Robot Interaction. ACM, 429–437. doi:10.1145/3319502. 3374811
-
[8]
Bandara, Alessandra Russo, Luke Dickens, Blaine A
Gül Çalikli, Mark Law, Arosha K. Bandara, Alessandra Russo, Luke Dickens, Blaine A. Price, Avelie Stuart, Mark Levine, and Bashar Nuseibeh. 2016. Privacy dynamics: learning privacy norms for social software. InProceedings of the 11th International Symposium on Software Engineering for Adaptive and Self-Managing Systems, SEAMS@ICSE 2016, Austin, Texas, USA...
-
[9]
Javier Cámara, Gabriel Moreno, and David Garlan. 2015. Reasoning about human participation in self-adaptive systems. In2015 IEEE/ACM 10th International Sym- posium on Software Engineering for Adaptive and Self-Managing Systems. IEEE, 146–156
2015
-
[10]
Jane Cleland-Huang, Theodore Chambers, Sebastian Zudaire, Muhammed Tawfiq Chowdhury, Ankit Agrawal, and Michael Vierhauser. 2023. Human-Machine Teaming with Small Unmanned Aerial Systems in a MAPE-K Environment.ACM Trans. Auton. Adapt. Syst.(sep 2023). doi:10.1145/3618001 Just Accepted
-
[11]
Alexandre David, Peter G Jensen, Kim Guldstrand Larsen, Axel Legay, Didier Lime, Mathias Grund Sørensen, and Jakob H Taankvist. 2014. On time with minimal expected cost!. InAutomated Technology for Verification and Analysis. Springer, 129–145
2014
-
[12]
Alexandre David, Peter Gjøl Jensen, Kim Guldstrand Larsen, Marius Mikucionis, and Jakob Haahr Taankvist. 2015. Uppaal Stratego. InIntl. Conf. on Tools and Algorithms for the Construction and Analysis of Systems (Lecture Notes in Computer Science, Vol. 9035). Springer, 206–211. doi:10.1007/978-3-662-46681-0_16
-
[13]
Rogério de Lemos. 2020. Human in the loop: what is the point of no return?. In SEAMS ’20: IEEE/ACM 15th International Symposium on Software Engineering for Adaptive and Self-Managing Systems, Seoul, Republic of Korea, 29 June - 3 July,
2020
-
[14]
ACM, 165–166. doi:10.1145/3387939.3391597
-
[15]
John Drury, Holly Carter, Chris Cocking, Evangelos Ntontis, Selin Tekin Guven, and Richard Amlôt. 2019. Facilitating collective psychosocial resilience in the public in emergencies: Twelve recommendations based on the social identity approach.Frontiers in public health7 (2019), 141
2019
-
[16]
Douglas Eskins and William H. Sanders. 2011. The Multiple-Asymmetric-Utility System Model: A Framework for Modeling Cyber-Human Systems. InIntl. Conf. on Quantitative Evaluation of Systems. IEEE Computer Society, 233–242. doi:10. 1109/QEST.2011.38
2011
-
[17]
Fischer, Chris Greenhalgh, Wenchao Jiang, Sarvapali D
Joel E. Fischer, Chris Greenhalgh, Wenchao Jiang, Sarvapali D. Ramchurn, Feng Wu, and Tom Rodden. 2021. In-the-loop or on-the-loop? Interactional arrange- ments to support team coordination with a planning agent.Concurr. Comput. Pract. Exp.33, 8 (2021). doi:10.1002/cpe.4082
-
[18]
Carlos Gavidia-Calderon, Amel Bennaceur, Tamara Lopez, Anastasia Kordoni, Mark Levine, and Bashar Nuseibeh. 2023. Meet your Maker: A Social Identity Analysis of Robotics Software Engineering. InTAS. ACM, 44:1–44:5
2023
-
[19]
Carlos Gavidia-Calderon, Anastasia Kordoni, Amel Bennaceur, Mark Levine, and Bashar Nuseibeh. 2024. The IDEA of Us: An Identity-Aware Architecture for Autonomous Systems.ACM Trans. on Soft. Engineering and Methodology(2024)
2024
-
[20]
Pipe, Chris Melhuish, and Ute Leonards
Elena Corina Grigore, Kerstin Eder, Anthony G. Pipe, Chris Melhuish, and Ute Leonards. 2013. Joint action understanding improves robot-to-human object handover. InProc. of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems. 4622–4629. doi:10.1109/IROS.2013.6697021
-
[21]
Dragan, Pieter Abbeel, and Stuart Russell
Dylan Hadfield-Menell, Anca D. Dragan, Pieter Abbeel, and Stuart Russell
-
[22]
arXiv:1606.03137 http://arxiv.org/abs/1606.03137
Cooperative Inverse Reinforcement Learning.CoRRabs/1606.03137 (2016). arXiv:1606.03137 http://arxiv.org/abs/1606.03137
-
[23]
Ahmed E. Hassan, Dayi Lin, Gopi Krishnan Rajbahadur, Keheliya Gallaba, Fil- ipe Roseiro Côgo, Boyuan Chen, Haoxiang Zhang, Kishanthan Thangarajah, Gustavo Ansaldi Oliva, Jiahuei (Justina) Lin, Wali Mohammad Abdullah, and Zhen Ming (Jack) Jiang. 2024. Rethinking Software Engineering in the Era of Foundation Models: A Curated Catalogue of Challenges in the ...
2024
- [24]
-
[25]
Joe E Heimlich and Nicole M Ardoin. 2008. Understanding behavior to understand behavior change: A literature review.Environmental education research14, 3 (2008), 215–237
2008
-
[26]
Yuqin Jiang, Zhenlong Li, and Susan L Cutter. 2019. Social network, activity space, sentiment, and evacuation: what can social media tell us?Annals of the American Association of Geographers109, 6 (2019), 1795–1810
2019
-
[27]
Kenneth Johnson, Javier Cámara, Roopak Sinha, Samaneh Madanian, and Dave Parry. 2021. Towards Self-Adaptive Disaster Management Systems. In18th Inter- national Conference on Information Systems for Crisis Response and Management, ISCRAM 2021, Blacksburg, V A, USA, May 2021. ISCRAM Digital Library, 49–61. https://idl.iscram.org/show.php?record=2312
2021
-
[28]
Knepper, Jan Kretínský, Shelly Levy-Tzedek, Jamy Li, Todd D
Hadas Kress-Gazit, Kerstin Eder, Guy Hoffman, Henny Admoni, Brenna Argall, Rüdiger Ehlers, Christoffer Heckman, Nils Jansen, Ross A. Knepper, Jan Kretínský, Shelly Levy-Tzedek, Jamy Li, Todd D. Murphey, Laurel D. Riek, and Dorsa Sadigh
-
[29]
Formalizing and guaranteeing human-robot interaction.Commun. ACM 64, 9 (2021), 78–84. doi:10.1145/3433637
-
[30]
John D Lee and Katrina A See. 2004. Trust in automation: Designing for appro- priate reliance.Human factors46, 1 (2004), 50–80
2004
-
[31]
Nianyu Li, Sridhar Adepu, Eunsuk Kang, and David Garlan. 2020. Explanations for human-on-the-loop: a probabilistic model checking approach. InSEAMS ’20: IEEE/ACM 15th International Symposium on Software Engineering for Adaptive and Self-Managing Systems, Seoul, Republic of Korea, 29 June - 3 July, 2020. ACM, 181–187. doi:10.1145/3387939.3391592
-
[32]
Nianyu Li, Javier Cámara, David Garlan, Bradley R. Schmerl, and Zhi Jin. 2021. Hey! Preparing Humans to do Tasks in Self-adaptive Systems. In16th International Symposium on Software Engineering for Adaptive and Self-Managing Systems, SEAMS@ICSE 2021, Madrid, Spain, May 18-24, 2021. IEEE, 48–58. doi:10.1109/ SEAMS51251.2021.00017
-
[33]
David Lo. 2023. Trustworthy and Synergistic Artificial Intelligence for Software Engineering: Vision and Roadmaps. InICSE-FoSE. IEEE, 69–85
2023
-
[34]
Henry B Mann and Donald R Whitney. 1947. On a test of whether one of two random variables is stochastically larger than the other.The annals of mathematical statistics(1947), 50–60
1947
-
[35]
Mollik Nayyar and Alan R Wagner. 2019. Effective robot evacuation strategies in emergencies. In2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). IEEE, 1–6
2019
-
[36]
2021.Conti Cyber Attack on the HSE: Independent Post Incident Review
PricewaterhouseCoopers (PwC). 2021.Conti Cyber Attack on the HSE: Independent Post Incident Review. Independent Post Incident Review HSE Publications. Health Service Executive (HSE), Ireland. https://www.hse.ie/eng/services/publications/ conti-cyber-attack-on-the-hse-full-report.pdf Commissioned by the HSE Board in conjunction with the CEO and Executive M...
2021
-
[37]
Salil Purandare, Urjoshi Sinha, Md Nafee Al Islam, Jane Cleland-Huang, and Myra B. Cohen. 2023. Self-Adaptive Mechanisms for Misconfigurations in Small Uncrewed Aerial Systems. In18th IEEE/ACM Symposium on Software Engineering for Adaptive and Self-Managing Systems, SEAMS 2023, Melbourne, Australia, May 15-16, 2023. IEEE, 169–180. doi:10.1109/SEAMS59076.2...
-
[38]
Towse, Bashar Nuseibeh, and Awais Rashid
Irum Rauf, Dirk van der Linden, Mark Levine, John N. Towse, Bashar Nuseibeh, and Awais Rashid. 2020. Security but not for security’s sake: The impact of social considerations on app developers’ choices. InICSE ’20: 42nd International Conference on Software Engineering, Workshops, Seoul, Republic of Korea, 27 June - 19 July, 2020. ACM, 141–144. doi:10.1145...
-
[39]
Paul Robinette, Wenchen Li, Robert Allen, Ayanna M Howard, and Alan R Wagner
-
[40]
In2016 11th ACM/IEEE international conference on human-robot interaction (HRI)
Overtrust of robots in emergency evacuation scenarios. In2016 11th ACM/IEEE international conference on human-robot interaction (HRI). IEEE, 101– 108
-
[41]
Ibraheem Sakour and Huosheng Hu. 2016. Robot assisted evacuation simulation. In2016 8th Computer Science and Electronic Engineering (CEEC). IEEE, 112–117
2016
-
[42]
Natalie Sebanz, Harold Bekkering, and Günther Knoblich. 2006. Joint action: bodies and minds moving together.Trends in cognitive sciences10, 2 (2006), 70–76
2006
-
[43]
Avelie Stuart, Dmitri Katz, Clifford Stevenson, Daniel Gooch, Lydia Harkin, Mohamed Bennasar, Lisa Sanderson, Jacki Liddle, Amel Bennaceur, Mark Levine, et al. 2022. Loneliness in older people and COVID-19: applying the social identity approach to digital intervention design.Computers in Human Behavior Reports (2022), 100179. Conference’17, July 2017, Was...
2022
-
[44]
2010.Social identity and intergroup relations
Henri Tajfel. 2010.Social identity and intergroup relations. Vol. 7. Cambridge University Press
2010
-
[45]
Thein Than Tun, Amel Bennaceur, and Bashar Nuseibeh. 2020. OASIS: Weak- ening User Obligations for Security-critical Systems. In28th IEEE International Requirements Engineering Conference, RE 2020, Zurich, Switzerland, August 31 - September 4, 2020. IEEE, 113–124. doi:10.1109/RE48521.2020.00023
-
[46]
András Vargha and Harold D Delaney. 2000. A critique and improvement of the CL common language effect size statistics of McGraw and Wong.Journal of Educational and Behavioral Statistics25, 2 (2000), 101–132
2000
-
[47]
Alan R Wagner and Paul Robinette. 2015. Towards robots that trust: Human subject validation of the situational conditions for trust.Interaction studies16, 1 (2015), 89–117
2015
-
[48]
Danny Weyns, Nelly Bencomo, Radu Calinescu, Javier Cámara, Carlo Ghezzi, Vincenzo Grassi, Lars Grunske, Paola Inverardi, Jean-Marc Jézéquel, Sam Malek, Raffaela Mirandola, Marco Mori, and Giordano Tamburrelli. 2019. Perpetual As- surances for Self-Adaptive Systems.CoRRabs/1903.04771 (2019). arXiv:1903.04771 http://arxiv.org/abs/1903.04771
work page internal anchor Pith review Pith/arXiv arXiv 2019
-
[49]
Danny Weyns, Radu Calinescu, Raffaela Mirandola, Kenji Tei, Maribel Acosta, Amel Bennaceur, Nicolas Boltz, Tomas Bures, Javier Camara, Ada Diaconescu, Gregor Engels, Simos Gerasimou, Ilias Gerostathopoulos, Sinem Getir Yaman, Vincenzo Grassi, Sebastian Hahner, Emmanuel Letier, Marin Litoiu, Lina Marsso, Angelika Musil, Juergen Musil, Genaina Nunes Rodrigu...
-
[50]
Sinem Getir Yaman, Ana Cavalcanti, Radu Calinescu, Colin Paterson, Pedro Ribeiro, and Beverley Townsend. 2023. Specification, Validation and Verification of Social, Legal, Ethical, Empathetic and Cultural Requirements for Autonomous Agents.CoRRabs/2307.03697 (2023). arXiv:2307.03697 doi:10.48550/ARXIV.2307. 03697
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.