Empowering Robot Teleoperation: Exploring the Synergies Between Devices and Manipulator Controllers in a Comparative Study
Pith reviewed 2026-05-21 18:44 UTC · model grok-4.3
The pith
Matching teleoperation devices with specific controller strategies improves performance on real manipulation tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Through side-by-side tests, the paper shows that the relationship between a teleoperation device and its paired manipulator controller determines how well real manipulation tasks can be completed, with each combination of position-based IK, torque-based ID, or compliant control producing distinct effects on task execution.
What carries the argument
Comparative evaluation of device-controller pairings (position-based IK control, torque-based ID control, and optimization-based compliant control) applied to teleoperated manipulation for data gathering.
If this is right
- Certain device-controller pairs deliver higher success rates on concrete manipulation actions.
- Data gathered under matched pairings can improve downstream robot skill learning from human demonstrations.
- Task-specific controller choices become a design variable when building teleoperation systems for real use.
- The observed effects scale with the demands of physical contact and precision in the chosen tasks.
Where Pith is reading between the lines
- Teleoperation hardware vendors might publish recommended controller pairings for common manipulation benchmarks.
- The same synergy principle could be tested in non-manipulation domains such as mobile robot navigation or assembly sequences.
- Repeating trials across varied operator experience levels would clarify how much the device-controller effect dominates other variables.
Load-bearing premise
Observed differences in task performance stem primarily from the device-controller match rather than operator skill, task choice, or hardware setup details.
What would settle it
Run the same tasks with several operators of matched skill levels and fully standardized calibration; if performance gaps shrink or vanish, the claimed device-controller synergy is not the main driver.
Figures












read the original abstract
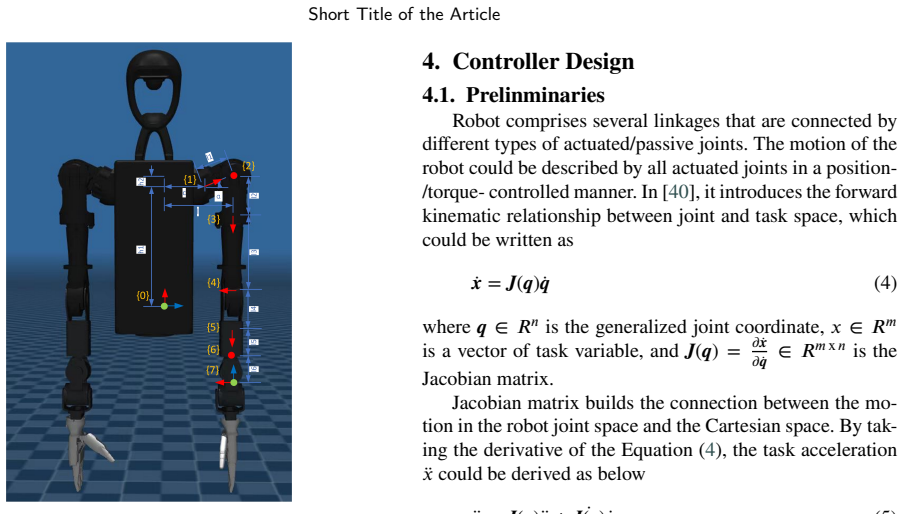
Robot learning empowers the robot system with human brain-like intelligence to autonomously acquire and adapt skills through experience, enhancing flexibility and adaptability in various environments. Aimed at achieving a similar level of capability in large language models (LLMs) for embodied intelligence, data quality plays a crucial role in training a foundational model with diverse robot skills. In this study, we investigate the collection of data for manipulation tasks using teleoperation devices. Different devices yield varying effects when paired with corresponding controller strategies, including position-based inverse kinematic (IK) control, torque-based inverse dynamic (ID) control, and optimization-based compliant control. Analysis of experimental results suggests the importance of the relationship between teleoperation devices and controllers for real tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper investigates data collection for robot manipulation tasks via teleoperation, comparing different devices paired with position-based inverse kinematics (IK) control, torque-based inverse dynamics (ID) control, and optimization-based compliant control. It claims that experimental results demonstrate varying effects from these pairings and that the relationship between devices and controllers is important for real tasks.
Significance. If the central claim holds after proper isolation of effects, the work could provide practical guidance for selecting teleoperation hardware and controllers to improve data quality for training embodied AI models. However, the absence of reported quantitative metrics, statistical tests, or controls for confounds limits its immediate impact on the field.
major comments (2)
- The central claim that performance differences arise primarily from device-controller synergies (position IK, torque ID, optimization-based compliant) is load-bearing but unsupported by any reported quantitative results, error bars, sample sizes, or statistical tests in the provided analysis. This directly weakens the empirical observation in the abstract.
- No details are given on experimental design elements such as within-subjects counterbalancing, operator training protocols, task difficulty standardization, or hardware calibration procedures. Without these, observed differences remain compatible with alternative explanations including operator skill variance or unmeasured confounds, as the weakest assumption in the stress-test note.
minor comments (1)
- The abstract and title could more precisely define the specific teleoperation devices under study rather than referring generically to 'different devices'.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback on our manuscript. We address each major comment below and are prepared to revise the paper to strengthen its empirical rigor and methodological transparency.
read point-by-point responses
-
Referee: The central claim that performance differences arise primarily from device-controller synergies (position IK, torque ID, optimization-based compliant) is load-bearing but unsupported by any reported quantitative results, error bars, sample sizes, or statistical tests in the provided analysis. This directly weakens the empirical observation in the abstract.
Authors: We acknowledge that the initial submission presented results primarily through qualitative descriptions of observed trends rather than detailed statistical analysis. The experiments did collect quantitative metrics including task completion times, success rates, and error measurements across multiple trials per condition. In the revised manuscript, we will include these data with sample sizes, error bars, and appropriate statistical tests (such as paired t-tests or ANOVA) to provide stronger quantitative support for the device-controller synergy claims. revision: yes
-
Referee: No details are given on experimental design elements such as within-subjects counterbalancing, operator training protocols, task difficulty standardization, or hardware calibration procedures. Without these, observed differences remain compatible with alternative explanations including operator skill variance or unmeasured confounds, as the weakest assumption in the stress-test note.
Authors: We agree that additional methodological details are necessary for reproducibility and to address potential confounds. The revised manuscript will expand the Methods section to explicitly describe the within-subjects design with counterbalancing of device-controller pairings, standardized operator training protocols, task difficulty standardization using fixed scenarios and object placements, and hardware calibration procedures. This will help rule out alternative explanations such as operator skill variance. revision: yes
Circularity Check
No circularity: empirical results from device-controller comparisons do not reduce to fitted inputs or self-definitions
full rationale
The paper is an empirical comparative study of teleoperation devices paired with position IK, torque ID, and optimization-based compliant controllers for manipulation tasks. The central claim—that device-controller synergies matter for real tasks—is presented as arising directly from analysis of experimental performance data. No equations, parameter fits, predictions derived from subsets of the same data, self-citations as load-bearing uniqueness theorems, or ansatzes smuggled via prior work appear in the abstract or described structure. The derivation chain is therefore self-contained: observed differences are reported as evidence rather than being redefined or forced by construction from the inputs themselves. This is the expected non-finding for a straightforward experimental robotics paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Mahya Shahbazi, Seyed Farokh Atashzar, and Rajni V. Patel. A systematic review of multilateral teleoperation systems.IEEE Trans- actions on Haptics, 11(3):338–356, 2018
work page 2018
-
[2]
A concentrated-flux-type pm machine with irregular magnets and iron poles
Pengjie Xiang, Liang Yan, Yiming Guo, Xinghua He, Chris Ger- ada, and I-Ming Chen. A concentrated-flux-type pm machine with irregular magnets and iron poles. IEEE/ASME Transactions on Mechatronics, 29(1):691–702, 2024
work page 2024
-
[3]
Tatsuya Hashimoto Naoki Mizuno, Yuichi Tazaki and Yasuyoshi Yokokohji. A comparative study of manipulator teleoperation meth- ods for debris retrieval phase in nuclear power plant decommission- ing. Advanced Robotics, 37(9):541–559, 2023
work page 2023
-
[4]
Ugur Tumerdem and Nural Yilmaz. A unifying framework for transparencyoptimizedcontrollerdesigninmultilateralteleoperation with time delays.Control Engineering Practice, 117:104931, 2021
work page 2021
-
[5]
A simplified grasping strategy for under-driven dexterous hand based on geometric structure
Yuanchen Tang and Liang He. A simplified grasping strategy for under-driven dexterous hand based on geometric structure. In2024 6th International Academic Exchange Conference on Science and Technology Innovation (IAECST), pages 1877–1881, 2024
work page 2024
-
[6]
ShuheiShimmyo,YukiSaito,TakahiroNozaki,andKouheiOhnishi. Symmetric operational force compensator for bilateral teleoperation under time delay based on power flow direction. In 2019 IEEE International Conference on Mechatronics (ICM), volume 1, pages 700–705, 2019
work page 2019
-
[7]
Neural network-based passivity control of teleoperation system under time-varying delays
Da Sun, Fazel Naghdy, and Haiping Du. Neural network-based passivity control of teleoperation system under time-varying delays. IEEE Transactions on Cybernetics, 47(7):1666–1680, 2017
work page 2017
-
[8]
G. V. A. G. Asanka Perera and A. M. Harsha S. Abeykoon. Review on bilateral teleoperation with force, position, power and impedance scaling. In7thInternationalConferenceonInformationandAutoma- tion for Sustainability, pages 1–7, 2014
work page 2014
-
[9]
PXiang,LYan,LGe,XHe,NDu,XLiu,XYang,WHua,andIChen. Adevelopmentofaradial-fluxmachinewithmixed-magnetrotorand non-ferromagnetic yoke for low torque ripple and rotor mass.IEEE Transactions on Industry Applications, 2025
work page 2025
-
[10]
Xinghua He, Pengjie Xiang, Liang Yan, Xiaoshuai Liu, and Xuxu Yang. Attitude measurement and zero offset calibration for a novel spherical actuator with tiltable stator.IEEE Transactions on Instru- mentation and Measurement, 74:1–9, 2025
work page 2025
-
[11]
Vision-guided manipulator operating system based on csrt algorithm
Suwan Bu, Liang Yan, Xiaoshan Gao, Peiran Zhao, and Chee Kian Lim. Vision-guided manipulator operating system based on csrt algorithm. International Journal of Hydromechatronics, 5(3):260– 274, 2022
work page 2022
-
[12]
Zhao, Vikash Kumar, Sergey Levine, and Chelsea Finn
Tony Z. Zhao, Vikash Kumar, Sergey Levine, and Chelsea Finn. Learning fine-grained bimanual manipulation with low-cost hard- ware, 2023
work page 2023
-
[13]
Scott Reed, Konrad Zolna, Emilio Parisotto, Sergio Gomez Col- menarejo, Alexander Novikov, Gabriel Barth-Maron, Mai Gimenez, YurySulsky,JackieKay,JostTobiasSpringenberg,TomEccles,Jake Bruce, Ali Razavi, Ashley Edwards, Nicolas Heess, Yutian Chen, Raia Hadsell, Oriol Vinyals, Mahyar Bordbar, and Nando de Freitas. A generalist agent, 2022
work page 2022
-
[14]
HarveyStedman,BasaranBahadirKocer,MirkoKovac,andVijayM. Pawar. Vrtab-map: A configurable immersive teleoperation frame- workwithonline3dreconstruction. In 2022IEEEInternationalSym- posium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), pages 104–110, 2022
work page 2022
-
[15]
Task- orientatedrobotteleoperationusingwearableimus
Qilong Yuan, Teoh Yee Seng, Qinghua Lu, and I-Ming Chen. Task- orientatedrobotteleoperationusingwearableimus. In 2017IEEEIn- ternational Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), pages 111–115, 2017
work page 2017
-
[16]
Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots
ChengChi,ZhenjiaXu,ChuerPan,EricCousineau,BenjaminBurch- fiel,SiyuanFeng,RussTedrake,andShuranSong. Universalmanipu- lationinterface:In-the-wildrobotteachingwithoutin-the-wildrobots. arXiv preprint arXiv:2402.10329v3, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[17]
A first look at immersive telepresence on apple visionpro
Ruizhi Cheng, Nan Wu, Matteo Varvello, Eugene Chai, Songqing Chen, and Bo Han. A first look at immersive telepresence on apple visionpro. InProceedingsofthe2024ACMonInternetMeasurement Conference, IMC ’24, page 555–562, New York, NY, USA, 2024. Association for Computing Machinery
work page 2024
- [18]
-
[19]
Monica M.Q. Li. A motion capture quality comparison between rokoko and kinect. In2024 IEEE International Conference on Ar- tificial Intelligence in Engineering and Technology (IICAIET), pages 239–242, 2024
work page 2024
- [20]
-
[21]
Safepdebacksteppingqpcontrol with high relative degree cbfs: Stefan model with actuator dynamics
ShumonKogaandMiroslavKrstic. Safepdebacksteppingqpcontrol with high relative degree cbfs: Stefan model with actuator dynamics. IEEE Transactions on Automatic Control, 68(12):7195–7208, 2023
work page 2023
-
[22]
Motionaccuracyandcomputationaleffortinqp-based robot control
Sélim Chefchaouni, Mehdi Benallegue, Adrien Escande, and Pierre- BriceWieber. Motionaccuracyandcomputationaleffortinqp-based robot control. In2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids), pages 129–134, 2024
work page 2024
-
[23]
Anovelqp-basedkinematicre- dundancyresolutionmethodwithjointconstraintssatisfaction
ŁukaszWolińskiandMarekWojtyra. Anovelqp-basedkinematicre- dundancyresolutionmethodwithjointconstraintssatisfaction. IEEE First Author et al.:Preprint submitted to Elsevier Page 11 of 13 Short Title of the Article Access, 10:41023–41037, 2022
work page 2022
-
[24]
Qp- based adaptive-gains compliance control in humanoid falls
VincentSamy,KarimBouyarmane,andAbderrahmaneKheddar. Qp- based adaptive-gains compliance control in humanoid falls. In2017 IEEE International Conference on Robotics and Automation (ICRA), pages 4762–4767, 2017
work page 2017
-
[25]
Consensus in op- erational space for robotic manipulators with task and input con- straints
Muhammad Ali Murtaza and Seth Hutchinson. Consensus in op- erational space for robotic manipulators with task and input con- straints. In2022 International Conference on Robotics and Automa- tion (ICRA), pages 10148–10154, 2022
work page 2022
-
[26]
Damped least-squares optimization-based singularity configuration avoidance for manipulator
Yang li, Yukun Zheng, Yixiang Liu, Song Gao, and Rui Song. Damped least-squares optimization-based singularity configuration avoidance for manipulator. In Proceedings of the 2024 2nd Inter- national Conference on Frontiers of Intelligent Manufacturing and Automation,CFIMA’24,page560–565,NewYork,NY,USA,2025. Association for Computing Machinery
work page 2024
-
[27]
Singularity avoidancemethodfordual-armclosed-chainsystembasedondamped least squares
Qin Zhang, Zhenyu Liu, Hui Chai, and Yueyang Li. Singularity avoidancemethodfordual-armclosed-chainsystembasedondamped least squares. International Journal of Advanced Robotic Systems, 20(5):17298806231206940, 2023
work page 2023
-
[28]
Muhamed M. Hashem, Khaled A. Ghamry, Amr Saleh, and Ibrahim A. Elsherif. A comparative study of pseudoinverse and dampedleastsquaresapproachesininversekinematicsfora5-dofhy- draulicarm. JournalofPhysics:ConferenceSeries ,2811(1):012002, jul 2024
work page 2024
-
[29]
Inverse kinematicsforautonomousunderwatermanipulationsusingweighted damped least squares
Gun Rae Cho, Mun-Jik Lee, Min-Gyu Kim, and Ji-Hong Li. Inverse kinematicsforautonomousunderwatermanipulationsusingweighted damped least squares. In 2017 14th International Conference on UbiquitousRobotsandAmbientIntelligence(URAI) ,pages765–770, 2017
work page 2017
-
[30]
Daniele Di Vito, Ciro Natale, and Gianluca Antonelli. A comparison of damped least squares algorithms for inverse kinematics of robot manipulators **this work was supported by the european commu- nity through theprojectsrobust(h2020-690416),euroc(fp7-608849), dexrov (h2020-635491) and aeroarms (h2020-644271). IFAC- PapersOnLine, 50(1):6869–6874, 2017. 20t...
work page 2017
-
[31]
Motion planning for bandaging task with abnormal posture detectionandavoidance
Zhifeng Huang, Juncheng Li, Jianping Huang, Jun Ota, and Yun Zhang. Motion planning for bandaging task with abnormal posture detectionandavoidance. IEEE/ASMETransactionsonMechatronics , 25(5):2364–2375, 2020
work page 2020
-
[32]
Tianyu Zhang, Xiangjia Chen, Guoxin Fang, Yingjun Tian, and Charlie C. L. Wang. Singularity-aware motion planning for multi- axis additive manufacturing.IEEE Robotics and Automation Letters, 6(4):6172–6179, 2021
work page 2021
-
[33]
Singularity analysis and singularity avoidance trajectory planning for industrial robots
HangZhao,BangchengZhang,XiaojingYin,ZiqiangZhang,QiXia, and Fan Zhang. Singularity analysis and singularity avoidance trajectory planning for industrial robots. In2021 China Automation Congress (CAC), pages 6164–6169, 2021
work page 2021
-
[34]
Trajectory optimization with geometry-aware singularity avoidance for robot motion planning
Luka Petrović, Filip Marić, Ivan Marković, Jonathan Kelly, and Ivan Petrović. Trajectory optimization with geometry-aware singularity avoidance for robot motion planning. In 2021 21st International Conference on Control, Automation and Systems (ICCAS), pages 1760–1765, 2021
work page 2021
-
[35]
PeiyaoShen,YongchunFang,andXueboZhang. Trajectoryplanning of omnidirectional mobile robots with active casters: Multi-motor coordination and singularity avoidance. In2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intel- ligent Systems (CYBER), pages 151–156, 2015
work page 2015
-
[36]
Null space projection-based design of multibeam for joint communicationandsensingsystems
JinbaeSuh,JoonhyukKang,KawonHan,SongcheolHong,andGye- Tae Gil. Null space projection-based design of multibeam for joint communicationandsensingsystems. IEEECommunicationsLetters , 27(8):2162–2166, 2023
work page 2023
-
[37]
Passi- vation of projection-based null space compliance control via energy tanks
Alexander Dietrich, Christian Ott, and Stefano Stramigioli. Passi- vation of projection-based null space compliance control via energy tanks. IEEE Robotics and Automation Letters, 1(1):184–191, 2016
work page 2016
-
[38]
Introducing common null space of gradients for gradient projection methods in continual learning
Chengyi Yang, Mingda Dong, Xiaoyue Zhang, Jiayin Qi, and Aimin Zhou. Introducing common null space of gradients for gradient projection methods in continual learning. In Proceedings of the 32nd ACM International Conference on Multimedia, MM ’24, page 5489–5497, New York, NY, USA, 2024. Association for Computing Machinery
work page 2024
-
[39]
Shijun Tang, Xingtian Xiao, Zhongbo Sun, Yunfeng Hu, and Hong Chen. Anantinoisedisturbancefuzzyneuraldynamicsformanipula- bilityoptimizationofomnidirectionalmobileredundantmanipulator. IEEE Transactions on Fuzzy Systems, 33(7):2189–2202, 2025
work page 2025
-
[40]
Kevin M. Lynch and Frank C. Park.Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, USA, 1st edition, 2017
work page 2017
-
[41]
Karim Bouyarmane, Kevin Chappellet, Joris Vaillant, and Abderrah- maneKheddar. Quadraticprogrammingformultirobotandtask-space force control.IEEE Transactions on Robotics, 35(1):64–77, 2019
work page 2019
-
[42]
Impedance control: An approach to manipulation
Neville Hogan. Impedance control: An approach to manipulation. In 1984 American Control Conference, pages 304–313, 1984
work page 1984
-
[43]
A. Albu-Schaffer, C. Ott, U. Frese, and G. Hirzinger. Cartesian impedance control of redundant robots: recent results with the dlr- light-weight-arms. In 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), volume 3, pages 3704–3709 vol.3, 2003
work page 2003
-
[44]
Martin L. Felis. Rbdl: an efficient rigid-body dynamics library using recursive algorithms.Autonomous Robots, pages 1–17, 2016
work page 2016
-
[45]
B.Stellato,G.Banjac,P.Goulart,A.Bemporad,andS.Boyd. OSQP: an operator splitting solver for quadratic programs.Mathematical Programming Computation, 12(4):637–672, 2020. Yuxuan Zhao received his BEng de- greewithadoublemajorinMechanical Engineering and Computer Engineer- ing from the Hong Kong University of Science and Technology. He is cur- rentlypursuing...
work page 2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.