Dynamic Tube MPC for Nonlinear Systems
Pith reviewed 2026-05-24 21:26 UTC · model grok-4.3
The pith
Dynamic Tube MPC optimizes tube geometry and nominal trajectory simultaneously for nonlinear systems by adding sliding-control tube dynamics to the MPC problem.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By employing boundary layer sliding control, the tube geometry can be expressed as a simple relation between control parameters and uncertainty bound; this relation is added as dynamics to the nominal MPC optimization, enabling simultaneous online optimization of both tube geometry and open-loop trajectory for nonlinear systems subject to state-dependent uncertainty.
What carries the argument
Boundary layer sliding control, which supplies an explicit algebraic relation between control parameters and the uncertainty bound that becomes the tube-geometry dynamics inside the MPC.
If this is right
- Tube cross-section can shrink or expand online in response to measured uncertainty or proximity constraints.
- State-dependent uncertainty can be exploited to enlarge feasible regions instead of using worst-case fixed bounds.
- The same MPC problem remains solvable in real time because the added tube dynamics do not increase complexity substantially.
- Obstacle avoidance can be achieved by letting the tube geometry adapt rather than by replanning the entire nominal path.
Where Pith is reading between the lines
- The approach could be combined with learned uncertainty models to further tighten the tube on the fly.
- Similar parameter-to-bound relations might be derived for other robust controllers, allowing dynamic tubes beyond sliding mode.
- In multi-agent settings the same mechanism could let each agent adjust its own tube size based on neighbor uncertainty.
Load-bearing premise
Boundary layer sliding control produces a simple explicit relation between its parameters and the uncertainty bound that can be inserted as dynamics into the MPC while preserving real-time feasibility and tube invariance.
What would settle it
A nonlinear system with state-dependent uncertainty where the sliding-control-derived tube relation fails to keep the actual trajectory inside the predicted tube for some feasible MPC solution.
Figures




read the original abstract
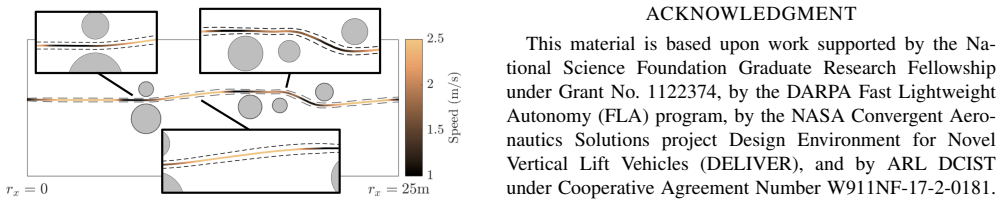
Modeling error or external disturbances can severely degrade the performance of Model Predictive Control (MPC) in real-world scenarios. Robust MPC (RMPC) addresses this limitation by optimizing over feedback policies but at the expense of increased computational complexity. Tube MPC is an approximate solution strategy in which a robust controller, designed offline, keeps the system in an invariant tube around a desired nominal trajectory, generated online. Naturally, this decomposition is suboptimal, especially for systems with changing objectives or operating conditions. In addition, many tube MPC approaches are unable to capture state-dependent uncertainty due to the complexity of calculating invariant tubes, resulting in overly-conservative approximations. This work presents the Dynamic Tube MPC (DTMPC) framework for nonlinear systems where both the tube geometry and open-loop trajectory are optimized simultaneously. By using boundary layer sliding control, the tube geometry can be expressed as a simple relation between control parameters and uncertainty bound; enabling the tube geometry dynamics to be added to the nominal MPC optimization with minimal increase in computational complexity. In addition, DTMPC is able to leverage state-dependent uncertainty to reduce conservativeness and improve optimization feasibility. DTMPC is demonstrated to robustly perform obstacle avoidance and modify the tube geometry in response to obstacle proximity.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the Dynamic Tube MPC (DTMPC) framework for nonlinear systems. It claims that boundary-layer sliding control yields an explicit, simple mapping from control parameters to uncertainty bounds, allowing tube-geometry dynamics to be appended directly to the nominal MPC optimization. This enables simultaneous optimization of tube geometry and open-loop trajectory, reduces conservativeness by exploiting state-dependent uncertainty, and is illustrated on an obstacle-avoidance task.
Significance. If the claimed explicit mapping and invariance properties hold with only minimal added complexity, the approach would address a recognized limitation of classical tube MPC—its inability to adapt tube size online or to state-dependent uncertainty—while retaining real-time feasibility. The decomposition into nominal MPC plus simple tube dynamics would be a useful technical contribution if supported by the necessary derivations.
major comments (3)
- [Abstract, §1, §3] The central enabling step—that boundary-layer sliding control produces a simple, explicit algebraic relation between control parameters and the uncertainty bound that can be appended as dynamics inside the MPC—is stated in the abstract and introduction but is not accompanied by the derivation or the resulting dynamic equations. Without this relation (presumably in §3), it is impossible to verify that the appended dynamics preserve tube invariance for nonlinear or state-dependent uncertainty.
- [§3 (tube-invariance subsection)] No invariance proof or set-theoretic argument is supplied showing that the dynamic tube remains robustly invariant under the proposed boundary-layer controller when the uncertainty bound is state-dependent. This is load-bearing for the claim that DTMPC is less conservative than fixed-tube methods while remaining robust.
- [§4, §5] The assertion of “minimal increase in computational complexity” is not supported by any complexity analysis, flop-count comparison, or timing benchmarks against a standard tube-MPC formulation. This directly affects the feasibility claim for real-time implementation.
minor comments (2)
- [§2] Notation for the tube radius or cross-section is introduced without a clear definition or reference to the preceding equation; a single consistent symbol and a short table of symbols would improve readability.
- [§5] The obstacle-avoidance example reports qualitative behavior but does not quantify the reduction in conservativeness (e.g., feasible region volume or cost improvement) relative to a fixed-tube baseline.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address each major comment below and will revise the manuscript to incorporate the requested additions and clarifications.
read point-by-point responses
-
Referee: [Abstract, §1, §3] The central enabling step—that boundary-layer sliding control produces a simple, explicit algebraic relation between control parameters and the uncertainty bound that can be appended as dynamics inside the MPC—is stated in the abstract and introduction but is not accompanied by the derivation or the resulting dynamic equations. Without this relation (presumably in §3), it is impossible to verify that the appended dynamics preserve tube invariance for nonlinear or state-dependent uncertainty.
Authors: We agree that the derivation of the algebraic mapping from boundary-layer sliding control parameters to the uncertainty bound, along with the resulting tube-geometry dynamics, requires explicit presentation. In the revised manuscript we will expand Section 3 to include the full step-by-step derivation and the appended dynamic equations. revision: yes
-
Referee: [§3 (tube-invariance subsection)] No invariance proof or set-theoretic argument is supplied showing that the dynamic tube remains robustly invariant under the proposed boundary-layer controller when the uncertainty bound is state-dependent. This is load-bearing for the claim that DTMPC is less conservative than fixed-tube methods while remaining robust.
Authors: The referee correctly identifies the absence of an explicit invariance argument. We will add a dedicated set-theoretic proof in the revised Section 3 establishing robust invariance of the dynamic tube for state-dependent uncertainty, thereby supporting the reduced-conservativeness claim. revision: yes
-
Referee: [§4, §5] The assertion of “minimal increase in computational complexity” is not supported by any complexity analysis, flop-count comparison, or timing benchmarks against a standard tube-MPC formulation. This directly affects the feasibility claim for real-time implementation.
Authors: We acknowledge that the complexity claim lacks quantitative support. The revised manuscript will include a flop-count analysis comparing DTMPC to standard tube MPC and, where feasible, timing benchmarks to substantiate the minimal-increase assertion and real-time feasibility. revision: yes
Circularity Check
No circularity; derivation imports sliding-control relation as external input
full rationale
The paper's central step asserts that boundary layer sliding control yields an explicit simple mapping from control parameters to uncertainty bound, which is then appended as dynamics inside the nominal MPC. This relation is presented as a property of the cited control technique rather than being defined by the DTMPC result itself or fitted to the target data. No equations in the supplied text reduce the claimed tube-geometry dynamics to a self-referential fit, renaming, or self-citation chain; the invariance and complexity claims therefore rest on independent sliding-mode literature rather than on a construction that forces the outcome. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
By using boundary layer sliding control, the tube geometry can be expressed as a simple relation between control parameters and uncertainty bound; enabling the tube geometry dynamics to be added to the nominal MPC optimization
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 1 (RCI Tube). ... Ωi(t) ≤ e^{Ac,i(t−t0)}Ωi(t0) + ∫ e^{Ac,i(t−t0−τ)}Bc,i Φi(τ) dτ
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Tube-based robust nonlinear model predictive control,
D. Q. Mayne and E. C. Kerrigan, “Tube-based robust nonlinear model predictive control,” in Proc. of the 7th IFAC Symposium on Nonlinear Control Systems, pp. 110–115, 2007
work page 2007
-
[2]
M. Althoff, O. Stursberg, and M. Buss, “Reachability analysis of nonlinear systems with uncertain parameters using conservative lin- earization,” in Decision and Control, 2008. CDC 2008. 47th IEEE Conference on, pp. 4042–4048, IEEE, 2008
work page 2008
-
[3]
M. Rubagotti, D. M. Raimondo, A. Ferrara, and L. Magni, “Robust model predictive control with integral sliding mode in continuous-time sampled-data nonlinear systems,” IEEE Transactions on Automatic Control, vol. 56, no. 3, pp. 556–570, 2011
work page 2011
-
[4]
Hierarchical model predictive/sliding mode control of nonlinear constrained uncertain systems,
G. P. Incremona, A. Ferrara, and L. Magni, “Hierarchical model predictive/sliding mode control of nonlinear constrained uncertain systems,” IFAC-PapersOnLine, vol. 48, no. 23, pp. 102–109, 2015
work page 2015
-
[5]
Funnel libraries for real-time robust feedback motion planning,
A. Majumdar and R. Tedrake, “Funnel libraries for real-time robust feedback motion planning,” The International Journal of Robotics Research, vol. 36, no. 8, pp. 947–982, 2017
work page 2017
-
[6]
Robust online motion planning via contraction theory and convex optimization,
S. Singh, A. Majumdar, J.-J. Slotine, and M. Pavone, “Robust online motion planning via contraction theory and convex optimization,” in Robotics and Automation (ICRA), 2017 IEEE International Conference on, pp. 5883–5890, IEEE, 2017
work page 2017
-
[7]
Ho- mothetic tube model predictive control,
S. V . Rakovi ´c, B. Kouvaritakis, R. Findeisen, and M. Cannon, “Ho- mothetic tube model predictive control,” Automatica, vol. 48, no. 8, pp. 1631–1638, 2012
work page 2012
-
[8]
Elastic tube model predictive control,
S. V . Rakovi ´c, W. S. Levine, and B. Ac ¸ıkmes ¸e, “Elastic tube model predictive control,” in American Control Conference (ACC), 2016 , pp. 3594–3599, IEEE, 2016
work page 2016
-
[9]
Sliding controller design for non-linear systems,
J.-J. E. Slotine, “Sliding controller design for non-linear systems,” International Journal of control , vol. 40, no. 2, pp. 421–434, 1984
work page 1984
-
[10]
Model predictive control: Recent developments and future promise,
D. Q. Mayne, “Model predictive control: Recent developments and future promise,” Automatica, vol. 50, no. 12, pp. 2967–2986, 2014
work page 2014
-
[11]
J. B. Rawlings and D. Q. Mayne, Model predictive control: Theory and design. Nob Hill Pub. Madison, Wisconsin, 2009
work page 2009
-
[12]
Robust and stochastic model predictive control: Are we going in the right direction?,
D. Mayne, “Robust and stochastic model predictive control: Are we going in the right direction?,” Annual Reviews in Control , vol. 41, pp. 184–192, 2016
work page 2016
-
[13]
A predictive and sliding mode cascade controller,
K. R. Muske, H. Ashrafiuon, and M. Nikkhah, “A predictive and sliding mode cascade controller,” in American Control Conference,
- [14]
-
[15]
An approach to design of sliding mode based generalized predictive control,
D. Miti ´c, M. Spasi ´c, M. Hovd, and D. Anti ´c, “An approach to design of sliding mode based generalized predictive control,” in Applied Computational Intelligence and Informatics (SACI), 2013 IEEE 8th International Symposium on , pp. 347–351, IEEE, 2013
work page 2013
-
[16]
Robust explicit nonlinear model predictive control with integral sliding mode.,
A. Chakrabarty, V . C. Dinh, G. T. Buzzard, S. H. Zak, and A. E. Rundell, “Robust explicit nonlinear model predictive control with integral sliding mode.,” in ACC, pp. 2851–2856, 2014
work page 2014
-
[17]
J.-J. E. Slotine, W. Li, et al. , Applied nonlinear control , vol. 199. prentice-Hall Englewood Cliffs, NJ, 1991
work page 1991
-
[18]
Successive convexification of non-convex optimal control problems and its convergence properties,
Y . Mao, M. Szmuk, and B. Ac ¸ıkmes ¸e, “Successive convexification of non-convex optimal control problems and its convergence properties,” in Decision and Control (CDC), 2016 IEEE 55th Conference on , pp. 3636–3641, IEEE, 2016
work page 2016
-
[19]
Yalmip : A toolbox for modeling and optimization in matlab,
J. L ¨ofberg, “Yalmip : A toolbox for modeling and optimization in matlab,” in In Proceedings of the CACSD Conference , (Taipei, Taiwan), 2004
work page 2004
-
[20]
The mosek optimization software,
“The mosek optimization software,” Online at http://www. mosek. com, vol. 54, no. 2-1, p. 5, 2010
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.