Point Cloud Sequence Encoding for Material-conditioned Graph Network Simulators
Pith reviewed 2026-05-21 06:02 UTC · model grok-4.3
The pith
Encoding point cloud sequences allows graph network simulators to adapt to unseen material properties without meshes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
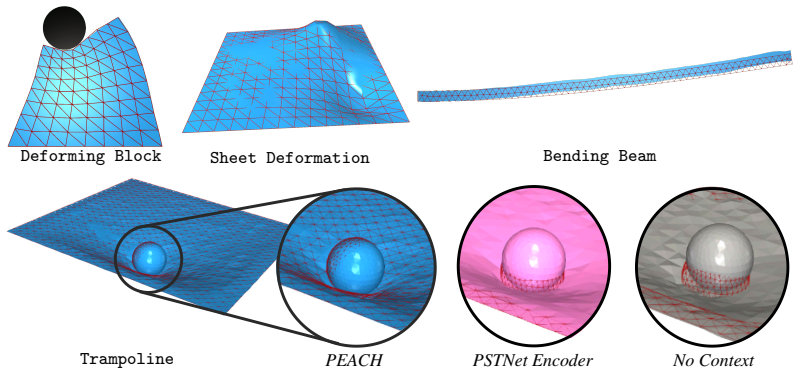
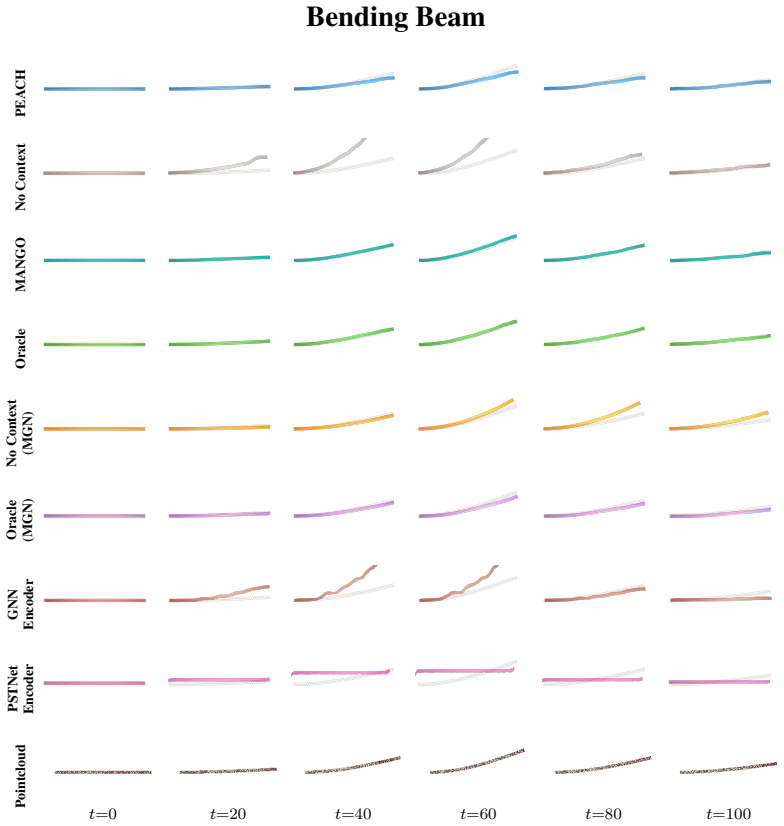
PEACH applies in-context learning on point clouds to adapt a learned simulator to unseen physical properties during inference by means of a novel spatio-temporal point cloud sequence encoder along with two forms of auxiliary supervision, resulting in accurate zero-shot sim-to-real transfer on dynamic scenes and better prediction accuracy than mesh-based baselines on simulation scenes.
What carries the argument
The spatio-temporal point cloud sequence encoder that processes observed point cloud sequences to supply material context to the graph network simulator.
If this is right
- Zero-shot sim-to-real transfer becomes feasible on challenging dynamic scenes.
- Prediction accuracy on simulated data surpasses mesh-based baselines.
- Real-world use is simplified because mesh reconstruction is no longer required.
- The simulator can adjust to new materials at inference time without retraining.
Where Pith is reading between the lines
- The method could extend to inferring continuous ranges of material properties rather than discrete categories seen in training.
- Combining the point cloud encoder with additional sensor streams might increase robustness when observations are noisy or incomplete.
- Online adaptation from live point cloud streams could support robotic systems operating in environments with changing materials.
Load-bearing premise
Point cloud sequences observed in a scene provide enough information to infer the material parameters needed by the simulator through in-context learning alone.
What would settle it
If the adapted simulator produces large trajectory errors when tested on a real dynamic scene containing a material whose properties lie well outside the training distribution, such as extreme viscosity, the claim that point cloud sequences suffice for adaptation would be falsified.
Figures












read the original abstract
Graph Network Simulators (GNSs) have emerged as powerful surrogates for complex physics-based simulation, offering inherent differentiability and orders-of-magnitude speedups over traditional solvers. However, GNSs typically assume access to the underlying material parameters, such as stiffness or viscosity, severely limiting their utility in realistic experimental settings. While recent meta-learning approaches address the parameter dependency by inferring properties from mesh trajectories, reconstructing a mesh from an observed scene is challenging. In this work, we introduce Point Cloud Encoding for Accurate Context Handling (PEACH), a novel framework that applies in-context learning on point clouds to adapt a learned simulator to unseen physical properties during inference. Our approach relies on a novel spatio-temporal point cloud sequence encoder, as well as two forms of auxiliary supervision to help improve simulation fidelity. We demonstrate that PEACH is capable of accurate zero-shot sim-to-real transfer on a challenging, dynamic scene. Experiments on simulation scenes show that PEACH even outperforms mesh-based baselines on prediction accuracy, while being much more practical for real-world deployment.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces PEACH, a framework for adapting Graph Network Simulators (GNS) to unseen material parameters (stiffness, viscosity) via in-context learning directly from point cloud sequences rather than meshes. It proposes a novel spatio-temporal point cloud sequence encoder together with two forms of auxiliary supervision, and claims accurate zero-shot sim-to-real transfer on dynamic scenes plus superior prediction accuracy over mesh-based meta-learning baselines while remaining more practical for real-world use.
Significance. If the central claims are substantiated, the work would meaningfully extend the practical reach of learned simulators by removing the mesh-reconstruction bottleneck and explicit parameter access required by prior meta-learning approaches. Successful point-cloud-based material inference could enable broader deployment in robotics and experimental settings where only RGB-D or LiDAR data are available.
major comments (2)
- [Abstract] Abstract: the claim that 'PEACH even outperforms mesh-based baselines on prediction accuracy' and achieves 'accurate zero-shot sim-to-real transfer' is presented without any quantitative metrics, error bars, dataset sizes, ablation tables, or statistical tests. These details are load-bearing for the central superiority and transfer claims.
- [§3] §3 (Encoder and auxiliary supervision): the paper must demonstrate that the spatio-temporal encoder isolates material-parameter effects from geometry, initial conditions, and sampling density rather than fitting scene-specific motion patterns. Without such isolation (e.g., via controlled ablations or parameter-recovery metrics), the zero-shot transfer result risks being driven by dataset bias instead of genuine in-context material inference.
minor comments (2)
- [Experiments] Figure captions and experimental tables should explicitly state the number of roll-out steps, point-cloud density, and occlusion levels used in the sim-to-real evaluation.
- [§3.2] Clarify the precise weighting and formulation of the two auxiliary supervision terms relative to the primary GNS loss.
Simulated Author's Rebuttal
We thank the referee for the constructive and insightful comments. We address each major point below and will revise the manuscript accordingly to better substantiate our claims and clarify the encoder's behavior.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'PEACH even outperforms mesh-based baselines on prediction accuracy' and achieves 'accurate zero-shot sim-to-real transfer' is presented without any quantitative metrics, error bars, dataset sizes, ablation tables, or statistical tests. These details are load-bearing for the central superiority and transfer claims.
Authors: We agree that the abstract would be strengthened by including key quantitative highlights. In the revised manuscript we will add concise metrics (e.g., mean prediction error reductions and dataset sizes) while respecting length limits. Full tables with error bars, ablation results, and statistical tests already appear in §4; we will also add a brief cross-reference in the abstract to direct readers to these details. revision: yes
-
Referee: [§3] §3 (Encoder and auxiliary supervision): the paper must demonstrate that the spatio-temporal encoder isolates material-parameter effects from geometry, initial conditions, and sampling density rather than fitting scene-specific motion patterns. Without such isolation (e.g., via controlled ablations or parameter-recovery metrics), the zero-shot transfer result risks being driven by dataset bias instead of genuine in-context material inference.
Authors: We acknowledge the value of explicit isolation experiments. Our current zero-shot results on held-out materials (with fixed geometry and initial conditions across simulation and real scenes) already provide supporting evidence, as does the performance gap versus mesh-based meta-learning baselines that receive explicit parameters. To strengthen this, we will add controlled ablations in the revision that vary only material parameters while holding geometry, sampling density, and initial states constant, together with parameter-recovery regression metrics and t-SNE visualizations of the encoder embeddings. These additions will be placed in §3 and §4. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents a new framework (PEACH) built around a novel spatio-temporal point cloud sequence encoder plus auxiliary supervision losses for in-context adaptation of a GNS to unseen material parameters. No derivation step reduces a claimed prediction to a fitted input by construction, nor does any load-bearing premise collapse to a self-citation or self-defined quantity. The zero-shot sim-to-real claim is supported by explicit architectural choices and empirical comparisons against mesh-based baselines rather than by renaming or tautological reuse of the target accuracy metric itself. The derivation therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Point cloud sequences from dynamic scenes provide sufficient signal to infer latent material parameters for simulator adaptation.
Reference graph
Works this paper leans on
-
[1]
Olek C Zienkiewicz and Robert Leroy Taylor.The finite element method for solid and structural mechanics. Elsevier, 2005
work page 2005
-
[2]
Eva Stanova, Gabriel Fedorko, Stanislav Kmet, Vieroslav Molnar, and Michal Fabian. Finite element analysis of spiral strands with different shapes subjected to axial loads.Advances in engineering software, 83:45–58, 2015
work page 2015
-
[3]
Interaction networks for learning about objects, relations and physics
Peter Battaglia, Razvan Pascanu, Matthew Lai, Danilo Jimenez Rezende, and koray kavukcuoglu. Interaction networks for learning about objects, relations and physics. In D. Lee, M. Sugiyama, U. Luxburg, I. Guyon, and R. Garnett, editors,Advances in Neural Information Processing Systems, volume 29. Curran Associates, Inc., 2016
work page 2016
- [4]
-
[5]
Message passing neural pde solvers
Johannes Brandstetter, Daniel E Worrall, and Max Welling. Message passing neural pde solvers. InInternational Conference on Learning Representations, 2022
work page 2022
-
[6]
Grounding graph network simulators using physical sensor observations
Jonas Linkerhägner, Niklas Freymuth, Paul Maria Scheikl, Franziska Mathis-Ullrich, and Gerhard Neumann. Grounding graph network simulators using physical sensor observations. In The Eleventh International Conference on Learning Representations, 2023
work page 2023
-
[7]
Tobias Würth, Niklas Freymuth, Gerhard Neumann, and Luise Kärger. Diffusion-based hierar- chical graph neural networks for simulating nonlinear solid mechanics.Advances in Neural Information Processing Systems, 39, 2025
work page 2025
-
[8]
System identification—a survey.Automatica, 7(2): 123–162, 1971
Karl Johan Åström and Peter Eykhoff. System identification—a survey.Automatica, 7(2): 123–162, 1971
work page 1971
-
[9]
System identification: theory for the user.PTR Prentice Hall, Upper Saddle River, NJ, 28:540, 1999
Ljung Lennart. System identification: theory for the user.PTR Prentice Hall, Upper Saddle River, NJ, 28:540, 1999
work page 1999
-
[10]
Victor Isakov.Inverse problems for partial differential equations, volume 127. Springer, 2006
work page 2006
-
[11]
Jiajun Wu, Ilker Yildirim, Joseph J Lim, Bill Freeman, and Josh Tenenbaum. Galileo: Perceiving physical object properties by integrating a physics engine with deep learning.Advances in neural information processing systems, 28, 2015
work page 2015
-
[12]
gradsim: Differentiable simulation for system identification and visuomotor control
J Krishna Murthy, Miles Macklin, Florian Golemo, Vikram V oleti, Linda Petrini, Martin Weiss, Breandan Considine, Jérôme Parent-Lévesque, Kevin Xie, Kenny Erleben, et al. gradsim: Differentiable simulation for system identification and visuomotor control. InInternational conference on learning representations, 2020. 10
work page 2020
-
[13]
Rethinking optimization with differentiable simulation from a global perspective
Rika Antonova, Jingyun Yang, Krishna Murthy Jatavallabhula, and Jeannette Bohg. Rethinking optimization with differentiable simulation from a global perspective. InConference on robot learning, pages 276–286. PMLR, 2023
work page 2023
-
[14]
Qingqing Zhao, David B. Lindell, and Gordon Wetzstein. Learning to solve pde-constrained inverse problems with graph networks. 2022
work page 2022
-
[15]
Latent neural operator for solving forward and inverse PDE problems
Tian Wang and Chuang Wang. Latent neural operator for solving forward and inverse PDE problems. InThe Thirty-eighth Annual Conference on Neural Information Processing Systems,
-
[16]
URLhttps://openreview.net/forum?id=VLw8ZyKfcm
-
[17]
Philipp Dahlinger, Tai Hoang, Denis Blessing, Niklas Freymuth, and Gerhard Neumann. Mango—adaptable graph network simulators via meta-learning.Advances in Neural Informa- tion Processing Systems, 39, 2025
work page 2025
-
[18]
Robocook: Long-horizon elasto-plastic object manipulation with diverse tools
Haochen Shi, Huazhe Xu, Samuel Clarke, Yunzhu Li, and Jiajun Wu. Robocook: Long-horizon elasto-plastic object manipulation with diverse tools. In Jie Tan, Marc Toussaint, and Kourosh Darvish, editors,Conference on Robot Learning, CoRL 2023, 6-9 November 2023, Atlanta, GA, USA, Proceedings of Machine Learning Research, pages 642–660. PMLR, 2023. URL https:...
work page 2023
-
[19]
Modeling the real world with high-density visual particle dynamics
William F Whitney, Jake Varley, Deepali Jain, Krzysztof Marcin Choromanski, Sumeet Singh, and Vikas Sindhwani. Modeling the real world with high-density visual particle dynamics. In 8th Annual Conference on Robot Learning, 2024. URLhttps://openreview.net/forum? id=pcPSGZFaCH
work page 2024
-
[20]
Elham Amin Mansour, Hehui Zheng, and Robert K. Katzschmann. Fast point cloud to mesh reconstruction for deformable object tracking. In Joaquim Filipe and Juha Röning, editors, Robotics, Computer Vision and Intelligent Systems - 4th International Conference, ROBOVIS 2024, Rome, Italy, February 25-27, 2024, Proceedings, Communications in Computer and Inform...
-
[21]
Matthew Loper, Naureen Mahmood, and Michael J. Black. Mosh: motion and shape capture from sparse markers.ACM Trans. Graph., 33(6):220:1–220:13, 2014. doi: 10.1145/2661229. 2661273. URLhttps://doi.org/10.1145/2661229.2661273
-
[22]
Dexpoint: Gen- eralizable point cloud reinforcement learning for sim-to-real dexterous manipulation
Yuzhe Qin, Binghao Huang, Zhao-Heng Yin, Hao Su, and Xiaolong Wang. Dexpoint: Gen- eralizable point cloud reinforcement learning for sim-to-real dexterous manipulation. In6th Annual Conference on Robot Learning, 2022. URL https://openreview.net/forum?id= tJE1Yyi8fUX
work page 2022
-
[23]
3d diffuser actor: Policy diffusion with 3d scene representations
Tsung-Wei Ke, Nikolaos Gkanatsios, and Katerina Fragkiadaki. 3d diffuser actor: Policy diffusion with 3d scene representations. In8th Annual Conference on Robot Learning, 2024. URLhttps://openreview.net/forum?id=gqCQxObVz2
work page 2024
-
[24]
Adapt3r: Adaptive 3d scene representation for domain transfer in imitation learning
Albert Wilcox, Mohamed Ghanem, Masoud Moghani, Pierre Barroso, Benjamin Joffe, and Animesh Garg. Adapt3r: Adaptive 3d scene representation for domain transfer in imitation learning. In9th Annual Conference on Robot Learning, 2025. URL https://openreview. net/forum?id=sUWOSP6SUJ
work page 2025
-
[25]
Xiaogang Jia, Qian Wang, Anrui Wang, Han A. Wang, Balázs Gyenes, Emiliyan Gospodinov, Xinkai Jiang, Ge Li, Hongyi Zhou, Weiran Liao, Xi Huang, Maximilian Beck, Moritz Reuss, Rudolf Lioutikov, and Gerhard Neumann. Pointmappolicy: Structured point cloud processing for multi-modal imitation learning. InThe Thirty-ninth Annual Conference on Neural Information...
work page 2026
-
[26]
Marta Garnelo, Dan Rosenbaum, Christopher Maddison, Tiago Ramalho, David Saxton, Murray Shanahan, Yee Whye Teh, Danilo Rezende, and S. M. Ali Eslami. Conditional neural processes. International Conference on Machine Learning, 2018
work page 2018
-
[27]
Masked autoencoders for point cloud self-supervised learning
Yatian Pang, Wenxiao Wang, Francis EH Tay, Wei Liu, Yonghong Tian, and Li Yuan. Masked autoencoders for point cloud self-supervised learning. InEuropean Conference on Computer Vision, pages 604–621. Springer, 2022. 11
work page 2022
-
[28]
Point-bert: Pre-training 3d point cloud transformers with masked point modeling
Xumin Yu, Lulu Tang, Yongming Rao, Tiejun Huang, Jie Zhou, and Jiwen Lu. Point-bert: Pre-training 3d point cloud transformers with masked point modeling. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 19313–19322, 2022
work page 2022
-
[29]
Guangyan Chen, Meiling Wang, Yi Yang, Kai Yu, Li Yuan, and Yufeng Yue. Pointgpt: Auto-regressively generative pre-training from point clouds.Advances in Neural Information Processing Systems, 36:29667–29679, 2023
work page 2023
-
[30]
Lev Davidovich Landau, LP Pitaevskii, Arnold Markovich Kosevich, and Evgenii Mikhailovich Lifshitz.Theory of elasticity: volume 7, volume 7. Elsevier, 2012
work page 2012
-
[31]
Jiri Blazek.Computational fluid dynamics: principles and applications. Butterworth- Heinemann, 2015
work page 2015
-
[32]
Stjepan Salatovic, Sebastian Krumscheid, Florian Wittemann, and Luise Kärger. Reliable uncertainty quantification for fiber orientation in composite molding processes using multilevel polynomial surrogates.Probabilistic Engineering Mechanics, page 103806, 2025
work page 2025
-
[33]
Stéphane Avril, Sam Evans, et al.Material parameter identification and inverse problems in soft tissue biomechanics, volume 573. Springer, 2017
work page 2017
-
[34]
Boon Xian Chai, Maheshi Gunaratne, Mohammad Ravandi, Jinze Wang, Tharun Dharmawick- rema, Adriano Di Pietro, Jiong Jin, and Dimitrios Georgakopoulos. Smart industrial internet of things framework for composites manufacturing.Sensors, 24(15):4852, 2024
work page 2024
-
[35]
Stéphane Avril, Marc Bonnet, Anne-Sophie Bretelle, Michel Grédiac, François Hild, Patrick Ienny, Félix Latourte, Didier Lemosse, Stéphane Pagano, Emmanuel Pagnacco, et al. Overview of identification methods of mechanical parameters based on full-field measurements.Experi- mental Mechanics, 48(4):381–402, 2008
work page 2008
-
[36]
Fabrice Pierron, Stéphane Avril, and V The Tran. Extension of the virtual fields method to elasto-plastic material identification with cyclic loads and kinematic hardening.International Journal of Solids and Structures, 47(22-23):2993–3010, 2010
work page 2010
-
[37]
Inverse problems in elasticity.Inverse problems, 21 (2):R1–R50, 2005
Marc Bonnet and Andrei Constantinescu. Inverse problems in elasticity.Inverse problems, 21 (2):R1–R50, 2005
work page 2005
-
[38]
Adaptigraph: Material-adaptive graph-based neural dynamics for robotic manipulation
Kaifeng Zhang, Baoyu Li, Kris Hauser, and Yunzhu Li. Adaptigraph: Material-adaptive graph-based neural dynamics for robotic manipulation. In Dana Kulic, Gentiane Venture, Kostas E. Bekris, and Enrique Coronado, editors,Robotics: Science and Systems XX, Delft, The Netherlands, July 15-19, 2024, 2024. doi: 10.15607/RSS.2024.XX.010. URL https: //doi.org/10.1...
-
[39]
Learning the elasticity parameters of deformable objects with a manipulation robot
Barbara Frank, Ruediger Schmedding, Cyrill Stachniss, Matthias Teschner, and Wolfram Burgard. Learning the elasticity parameters of deformable objects with a manipulation robot. In2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 18-22, 2010, Taipei, Taiwan, pages 1877–1883. IEEE, 2010. doi: 10.1109/IROS.2010.5653949. URL h...
-
[40]
In: 2022 IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems (IROS), pp
Priya Sundaresan, Rika Antonova, and Jeannette Bohg. Diffcloud: Real-to-sim from point clouds with differentiable simulation and rendering of deformable objects. InIEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2022, Kyoto, Japan, October 23-27, 2022, pages 10828–10835. IEEE, 2022. doi: 10.1109/IROS47612.2022.9981101. URL https:...
-
[41]
Xintong Yang, Ze Ji, and Yu-Kun Lai. Differentiable physics-based system identification for robotic manipulation of elastoplastic materials.The International Journal of Robotics Research, 44(13):2126–2155, 2025
work page 2025
-
[42]
Why are nonlinear fits to data so challenging?Physical review letters, 104(6):060201, 2010
Mark K Transtrum, Benjamin B Machta, and James P Sethna. Why are nonlinear fits to data so challenging?Physical review letters, 104(6):060201, 2010. 12
work page 2010
-
[43]
Yi Zhang, Albert Van Bael, Antonio Andrade-Campos, and Sam Coppieters. Parameter identifia- bility analysis: Mitigating the non-uniqueness issue in the inverse identification of an anisotropic yield function.International journal of solids and Structures, 243:111543, 2022
work page 2022
-
[44]
Learning to simulate complex physics with graph networks
Alvaro Sanchez-Gonzalez, Jonathan Godwin, Tobias Pfaff, Rex Ying, Jure Leskovec, and Peter Battaglia. Learning to simulate complex physics with graph networks. InProceedings of the 37th International Conference on Machine Learning, pages 8459–8468. PMLR, 2020
work page 2020
-
[45]
Learning flexible body collision dynamics with hierarchical contact mesh transformer
Youn-Yeol Yu, Jeongwhan Choi, Woojin Cho, Kookjin Lee, Nayong Kim, Kiseok Chang, ChangSeung Woo, ILHO KIM, SeokWoo Lee, Joon Young Yang, et al. Learning flexible body collision dynamics with hierarchical contact mesh transformer. InThe Twelfth International Conference on Learning Representations, 2024
work page 2024
-
[46]
Amber: Adaptive mesh generation by iterative mesh resolution prediction
Niklas Freymuth, Tobias Würth, Nicolas Schreiber, Balázs Gyenes, Andreas Boltres, Johannes Mitsch, Aleksandar Taranovic, Tai Hoang, Philipp Dahlinger, Philipp Becker, et al. Amber: Adaptive mesh generation by iterative mesh resolution prediction. InThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
work page 2025
-
[47]
Parameter-Efficient Conditioning for Material Generalization in Graph-Based Simulators
Naveen Raj Manoharan, Hassan Iqbal, and Krishna Kumar. Parameter-efficient conditioning for material generalization in graph-based simulators.arXiv preprint arXiv:2511.05456, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[48]
Ankush Chakrabarty, Gordon Wichern, Vedang M Deshpande, Abraham P Vinod, Karl Bern- torp, and Christopher R Laughman. Meta-learning for physically-constrained neural system identification.Neurocomputing, page 130945, 2025
work page 2025
-
[49]
Philipp Dahlinger, Niklas Freymuth, Tai Hoang, Tobias Würth, Michael V olpp, Luise Kärger, and Gerhard Neumann. Context-aware learned mesh-based simulation via trajectory-level meta-learning.Transactions on Machine Learning Research, 2025
work page 2025
-
[50]
Foundationstereo: Zero-shot stereo matching.arXiv, 2025
Bowen Wen, Matthew Trepte, Joseph Aribido, Jan Kautz, Orazio Gallo, and Stan Birchfield. Foundationstereo: Zero-shot stereo matching.arXiv, 2025
work page 2025
-
[51]
Qi, Hao Su, Kaichun Mo, and Leonidas J
R. Qi Charles, Hao Su, Mo Kaichun, and Leonidas J. Guibas. Pointnet: Deep learning on point sets for 3d classification and segmentation. In2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 77–85, 2017. doi: 10.1109/CVPR.2017.16
-
[52]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space
Charles Ruizhongtai Qi, Li Yi, Hao Su, and Leonidas J Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In I. Guyon, U. V on Luxburg, S. Bengio, H. Wal- lach, R. Fergus, S. Vishwanathan, and R. Garnett, editors,Advances in Neural Information Processing Systems, volume 30. Curran Associates, Inc., 2017. URL https://pro...
work page 2017
-
[53]
Xingyu Liu, Mengyuan Yan, and Jeannette Bohg. Meteornet: Deep learning on dynamic 3d point cloud sequences. In2019 IEEE/CVF International Conference on Computer Vision, ICCV 2019, Seoul, Korea (South), October 27 - November 2, 2019, pages 9245–9254. IEEE, 2019. doi: 10.1109/ICCV .2019.00934. URLhttps://doi.org/10.1109/ICCV.2019.00934
-
[54]
Pstnet: Point spatio- temporal convolution on point cloud sequences
Hehe Fan, Xin Yu, Yuhang Ding, Yi Yang, and Mohan Kankanhalli. Pstnet: Point spatio- temporal convolution on point cloud sequences. InInternational Conference on Learning Representations, 2021
work page 2021
-
[55]
Tenenbaum, and Antonio Torralba
Yunzhu Li, Jiajun Wu, Russ Tedrake, Joshua B. Tenenbaum, and Antonio Torralba. Learning particle dynamics for manipulating rigid bodies, deformable objects, and fluids. InInternational Conference on Learning Representations, 2019. URL https://openreview.net/forum? id=rJgbSn09Ym
work page 2019
-
[56]
Instant policy: In-context imitation learning via graph diffusion, 2024
Vitalis V osylius and Edward Johns. Instant policy: In-context imitation learning via graph diffusion, 2024. URLhttps://arxiv.org/abs/2411.12633
-
[57]
Equivariant graph neural operator for modeling 3d dynamics
Minkai Xu, Jiaqi Han, Aaron Lou, Jean Kossaifi, Arvind Ramanathan, Kamyar Azizzadenesheli, Jure Leskovec, Stefano Ermon, and Anima Anandkumar. Equivariant graph neural operator for modeling 3d dynamics. InForty-first International Conference on Machine Learning, ICML 2024, Vienna, Austria, July 21-27, 2024. OpenReview.net, 2024. URL https://openreview. ne...
work page 2024
-
[58]
Matthew Tancik, Pratul Srinivasan, Ben Mildenhall, Sara Fridovich-Keil, Nithin Raghavan, Utkarsh Singhal, Ravi Ramamoorthi, Jonathan Barron, and Ren Ng. Fourier features let networks learn high frequency functions in low dimensional domains.Advances in neural information processing systems, 33:7537–7547, 2020
work page 2020
-
[59]
Fourier features let agents learn high precision policies with imitation learning
Balázs Gyenes, Emiliyan Gospodinov, Jan Frieling, Enrico Krohmer, Xiaogang Jia, Nicolas Schreiber, Niklas Freymuth, and Gerhard Neumann. Fourier features let agents learn high precision policies with imitation learning. InForty-third International Conference on Machine Learning, 2026. URLhttps://openreview.net/forum?id=y03xxeUkgN
work page 2026
-
[60]
A volumetric method for building complex models from range images
Brian Curless and Marc Levoy. A volumetric method for building complex models from range images. InProceedings of the 23rd annual conference on Computer graphics and interactive techniques, pages 303–312, 1996
work page 1996
-
[61]
Occupancy networks: Learning 3d reconstruction in function space
Lars Mescheder, Michael Oechsle, Michael Niemeyer, Sebastian Nowozin, and Andreas Geiger. Occupancy networks: Learning 3d reconstruction in function space. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 4460–4470, 2019
work page 2019
-
[62]
Improved Regularization of Convolutional Neural Networks with Cutout
Terrance DeVries and Graham W Taylor. Improved regularization of convolutional neural networks with cutout.arXiv preprint arXiv:1708.04552, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[63]
Decoupled weight decay regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization. In7th International Conference on Learning Representations, ICLR 2019, New Orleans, LA, USA, May 6-9, 2019. OpenReview.net, 2019. URLhttps://openreview.net/forum?id=Bkg6RiCqY7
work page 2019
-
[64]
On the connection between mpnn and graph transformer
Chen Cai, Truong Son Hy, Rose Yu, and Yusu Wang. On the connection between mpnn and graph transformer. InInternational Conference on Machine Learning, pages 3408–3430. PMLR, 2023
work page 2023
-
[65]
SOFA: A Multi-Model Framework for Interactive Physical Simulation
François Faure, Christian Duriez, Hervé Delingette, Jérémie Allard, Benjamin Gilles, Stéphanie Marchesseau, Hugo Talbot, Hadrien Courtecuisse, Guillaume Bousquet, Igor Peterlik, and Stéphane Cotin. SOFA: A Multi-Model Framework for Interactive Physical Simulation. In Yohan Payan, editor,Soft Tissue Biomechanical Modeling for Computer Assisted Surgery, vol...
-
[66]
Springer, June 2012. doi: 10.1007/8415\_2012\_125. URL https://hal.inria.fr/ hal-00681539
-
[67]
Foundationstereo: Zero-shot stereo matching.CVPR, 2025
Bowen Wen, Matthew Trepte, Joseph Aribido, Jan Kautz, Orazio Gallo, and Stan Birchfield. Foundationstereo: Zero-shot stereo matching.CVPR, 2025. 14 A Broader Impact PEACHis a method for simulating deformable objects from point cloud observations, aimed at making physics-based simulation more accessible when material properties are unknown or hard to measu...
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.