Frequency-Guided Action Diffusion via Sub-Frequency Manifold Traversal
Pith reviewed 2026-06-29 12:02 UTC · model grok-4.3
The pith
A frequency guidance operator steers diffusion policies through sub-frequency manifolds for smoother robot actions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that the Frequency Guidance Operator steers the generation process of diffusion policies by progressively driving noisy samples through intermediate sub-frequency manifolds with expanding spectral bands, which suppresses high-frequency artifacts from demonstrations without removing task-critical fine-grained details, leading to superior smoothness and temporal consistency on 15 robotic manipulation tasks from 5 benchmarks.
What carries the argument
Frequency Guidance Operator (FGO), which steers generation by driving noisy samples through sub-frequency manifolds with expanding spectral bands.
If this is right
- Diffusion policies generate actions with improved smoothness and temporal consistency.
- High-frequency noise is suppressed while task-critical details are preserved.
- Performance gains appear across 15 manipulation tasks drawn from 5 benchmarks.
- Iterative denoising steps no longer amplify suboptimal artifacts from raw trajectories.
Where Pith is reading between the lines
- The approach could reduce reliance on manual cleaning of demonstration data before behavior cloning.
- Frequency-based steering during generation might transfer to other time-series generative models outside robotics.
- Optimal band-expansion schedules may differ by task category and could be learned per domain.
Load-bearing premise
High-frequency components in human demonstrations can be progressively isolated and suppressed via sub-frequency manifold traversal without removing the fine-grained action details required for successful task execution.
What would settle it
An experiment showing that FGO reduces success rates on tasks whose solutions require quick precise adjustments that register as high-frequency components in the original demonstrations.
Figures


read the original abstract
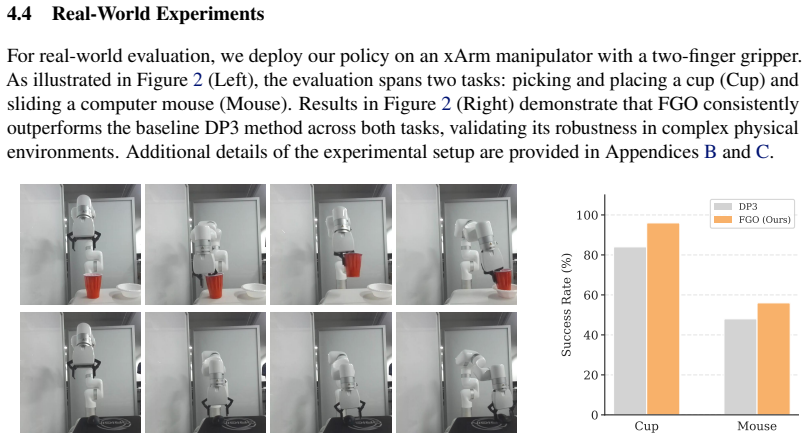
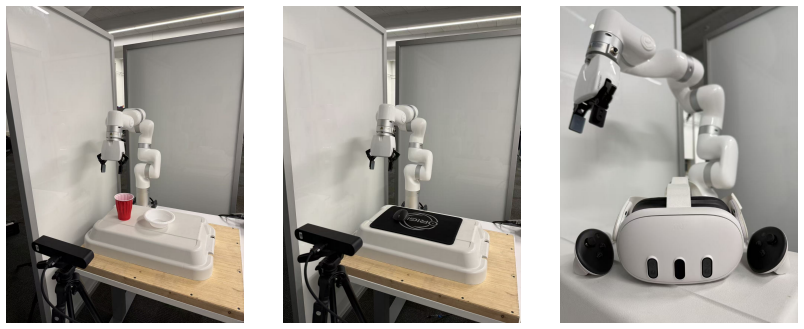
Learning visuomotor policies via behavior cloning typically involves mimicking expert demonstrations collected by human operators. However, natural human demonstrations inherently contain high-frequency noise, such as intermittent jerks, pauses, and action jitter. Training policies to directly imitate these raw trajectories inevitably causes the model to inherit these suboptimal behaviors. This pathology is particularly pronounced in diffusion-based policies, where iterative denoising steps can inadvertently amplify high-frequency artifacts at the expense of meaningful fine-grained details. To address these limitations, we present a novel frequency-based algorithm that enables implicit spectral maneuvering and smooth action generation. Our method, Frequency Guidance Operator (FGO), steers the generation process of diffusion polices by progressively driving the noisy samples through intermediate sub-frequency manifolds with expanding spectral bands. Validated on 15 robotic manipulation tasks from 5 benchmarks, FGO achieves superior performance in enhancing action smoothness and temporal consistency while preserving the details necessary for successful task execution. Project website: https://henrywjl.github.io/frequency-guidance-operator/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Frequency Guidance Operator (FGO) to improve diffusion-based visuomotor policies by addressing high-frequency noise (jerks, jitter) in human demonstrations. FGO steers the denoising process by progressively driving noisy samples through intermediate sub-frequency manifolds with expanding spectral bands, with the goal of enhancing action smoothness and temporal consistency while retaining task-critical details. The method is validated on 15 robotic manipulation tasks across 5 benchmarks, claiming superior performance over standard diffusion policies.
Significance. If the mechanism for spectral separation is rigorously defined and empirically shown to isolate noise without discarding necessary high-frequency action components, the approach could meaningfully advance behavior cloning for diffusion policies in robotics by providing a frequency-aware guidance strategy. The multi-benchmark evaluation is a positive aspect if accompanied by proper baselines and metrics.
major comments (2)
- [Abstract, §3] Abstract and §3 (Method): The central claim that FGO 'progressively driving the noisy samples through intermediate sub-frequency manifolds with expanding spectral bands' supplies neither the definition of the manifolds, the spectral partitioning rule, nor the guidance update rule. This is load-bearing for the claim that the operator suppresses noise while preserving task-critical details, as it is impossible to verify whether the traversal distinguishes signal from noise or applies an indiscriminate low-pass effect.
- [§5] §5 (Experiments): The abstract asserts 'superior performance' and 'validated on 15 robotic manipulation tasks' but provides no quantitative metrics, baselines, ablation studies, or error analysis in the visible description. Without these, the empirical support for the smoothness/consistency claims cannot be assessed and the weakest assumption (separable frequency regimes for noise vs. task details) remains untested.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and will revise the paper accordingly to improve clarity and empirical presentation.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and §3 (Method): The central claim that FGO 'progressively driving the noisy samples through intermediate sub-frequency manifolds with expanding spectral bands' supplies neither the definition of the manifolds, the spectral partitioning rule, nor the guidance update rule. This is load-bearing for the claim that the operator suppresses noise while preserving task-critical details, as it is impossible to verify whether the traversal distinguishes signal from noise or applies an indiscriminate low-pass effect.
Authors: We agree that the abstract and §3 would benefit from more explicit mathematical definitions to support the central claim. In the revised manuscript, we will expand §3 to formally define the sub-frequency manifolds as level sets in the Fourier domain of action trajectories, specify the spectral partitioning rule via cumulative energy thresholds that isolate high-frequency components, and detail the guidance update rule as an iterative projection operator that expands the admissible frequency band during denoising. These additions will clarify how the method targets noise while retaining task-critical high-frequency details. revision: yes
-
Referee: [§5] §5 (Experiments): The abstract asserts 'superior performance' and 'validated on 15 robotic manipulation tasks' but provides no quantitative metrics, baselines, ablation studies, or error analysis in the visible description. Without these, the empirical support for the smoothness/consistency claims cannot be assessed and the weakest assumption (separable frequency regimes for noise vs. task details) remains untested.
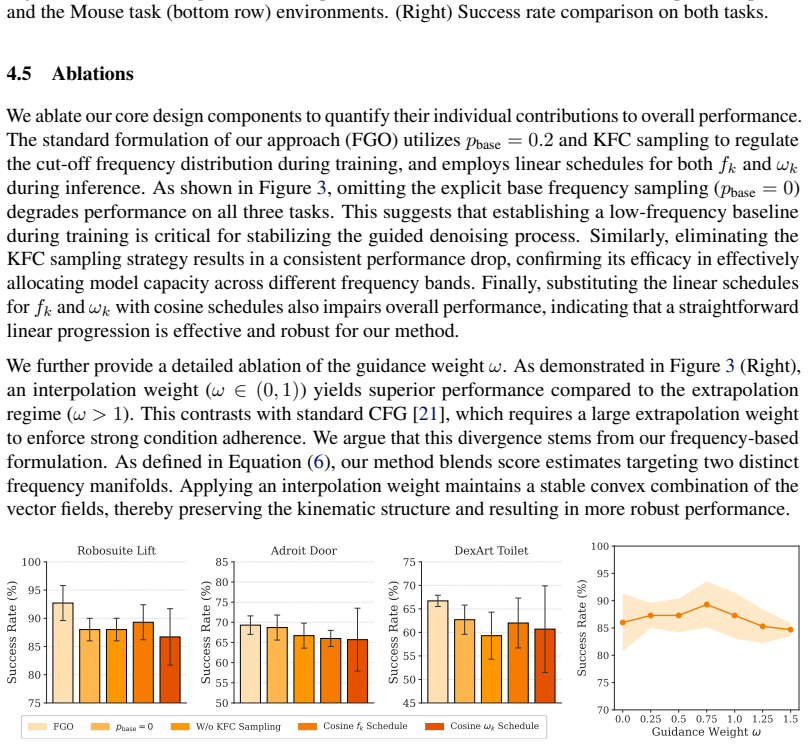
Authors: The full §5 of the manuscript reports quantitative results across the 15 tasks and 5 benchmarks, including success rates, smoothness metrics such as mean jerk, and comparisons against standard diffusion policies. However, we acknowledge that the abstract lacks specific numbers and that an explicit ablation testing the separability of frequency regimes would strengthen the claims. In revision, we will update the abstract to include key quantitative improvements and add a dedicated ablation subsection in §5 that isolates the effect of the frequency partitioning on noise versus task performance. revision: yes
Circularity Check
No circularity; derivation self-contained
full rationale
The provided abstract and description introduce the Frequency Guidance Operator (FGO) as a novel frequency-based algorithm for steering diffusion policies through sub-frequency manifolds. No equations, fitted parameters, self-citations, or derivation steps are shown that reduce by construction to the method's own outputs or inputs. The central claim of progressive spectral band traversal is presented as an independent algorithmic contribution without self-referential fitting or load-bearing citations to prior author work. This matches the default expectation of no significant circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion. InProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, 2023
2023
-
[2]
Y . Ze, G. Zhang, K. Zhang, C. Hu, M. Wang, and H. Xu. 3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations.arXiv preprint arXiv:2403.03954, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[3]
J. Ho, A. Jain, and P. Abbeel. Denoising diffusion probabilistic models. InProceedings of the 34th International Conference on Neural Information Processing Systems, pages 6840–6851, Vancouver, Canada, 2020
2020
-
[4]
S. Rissanen, M. Heinonen, and A. Solin. Generative modelling with inverse heat dissipation. arXiv preprint arXiv:2206.13397, 2022
-
[5]
F. Falck, T. Pandeva, K. Zahirnia, R. Lawrence, R. Turner, E. Meeds, J. Zazo, and S. Karmalkar. A fourier space perspective on diffusion models.arXiv preprint arXiv:2505.11278, 2025
-
[6]
J. Song, C. Meng, and S. Ermon. Denoising diffusion implicit models.arXiv preprint arXiv:2010.02502, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[7]
A. Q. Nichol and P. Dhariwal. Improved denoising diffusion probabilistic models. InProceed- ings of the International Conference on Machine Learning, pages 8162–8171, Vienna, Austria, 2021
2021
-
[8]
Ahmed, T
N. Ahmed, T. Natarajan, and K. R. Rao. Discrete cosine transform.IEEE Transactions on Computers, 100(1):90–93, 1974
1974
- [9]
-
[10]
Ronneberger, P
O. Ronneberger, P. Fischer, and T. Brox. U-net: Convolutional networks for biomedical image segmentation. InProceedings of the 18th International Conference on Medical Image Computing and Computer-Assisted Intervention, pages 234–241, Munich, Germany, 2015
2015
-
[11]
Dasari, O
S. Dasari, O. Mees, S. Zhao, M. K. Srirama, and S. Levine. The ingredients for robotic diffusion transformers. InProceedings of the IEEE International Conference on Robotics and Automation, pages 15617–15625, Atlanta, GA, USA, 2025
2025
-
[12]
Peebles and S
W. Peebles and S. Xie. Scalable diffusion models with transformers. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 4195–4205, Paris, France, 2023
2023
-
[13]
C. Zhu, R. Yu, S. Feng, B. Burchfiel, P. Shah, and A. Gupta. Unified world models: Cou- pling video and action diffusion for pretraining on large robotic datasets.arXiv preprint arXiv:2504.02792, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[14]
Y . Zhu, J. Wong, A. Mandlekar, R. Martín-Martín, A. Joshi, S. Nasiriany, and Y . Zhu. robo- suite: A modular simulation framework and benchmark for robot learning.arXiv preprint arXiv:2009.12293, 2020
work page internal anchor Pith review Pith/arXiv arXiv 2009
-
[15]
MimicGen: A Data Generation System for Scalable Robot Learning using Human Demonstrations
A. Mandlekar, S. Nasiriany, B. Wen, I. Akinola, Y . Narang, L. Fan, Y . Zhu, and D. Fox. Mimicgen: A data generation system for scalable robot learning using human demonstrations. arXiv preprint arXiv:2310.17596, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[16]
Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations
A. Rajeswaran, V . Kumar, A. Gupta, G. Vezzani, J. Schulman, E. Todorov, and S. Levine. Learning complex dexterous manipulation with deep reinforcement learning and demonstrations. arXiv preprint arXiv:1709.10087, 2017. 9
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[17]
C. Bao, H. Xu, Y . Qin, and X. Wang. Dexart: Benchmarking generalizable dexterous manipula- tion with articulated objects. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 21190–21200, Vancouver, Canada, 2023
2023
-
[18]
L. I. Rudin, S. Osher, and E. Fatemi. Nonlinear total variation based noise removal algorithms. Physica D Nonlinear Phenomena, 60(1–4):259–268, 1992
1992
- [19]
-
[20]
Flash and N
T. Flash and N. Hogan. The coordination of arm movements: an experimentally confirmed mathematical model.Journal of Neuroscience, 5(7):1688–1703, 1985
1985
-
[21]
Classifier-Free Diffusion Guidance
J. Ho and T. Salimans. Classifier-free diffusion guidance.arXiv preprint arXiv:2207.12598, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[22]
Flow Matching for Generative Modeling
Y . Lipman, R. T. Chen, H. Ben-Hamu, M. Nickel, and M. Le. Flow matching for generative modeling.arXiv preprint arXiv:2210.02747, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[23]
Y . Du, C. Durkan, R. Strudel, J. B. Tenenbaum, S. Dieleman, R. Fergus, J. Sohl-Dickstein, A. Doucet, and W. S. Grathwohl. Reduce, reuse, recycle: Compositional generation with energy-based diffusion models and mcmc. InProceedings of the International Conference on Machine Learning, pages 8489–8510, Honolulu, HI, USA, 2023
2023
-
[24]
Karras, M
T. Karras, M. Aittala, T. Kynkäänniemi, J. Lehtinen, T. Aila, and S. Laine. Guiding a diffusion model with a bad version of itself. InProceedings of the 38th International Conference on Neural Information Processing Systems, pages 52996–53021, Vancouver, Canada, 2024
2024
-
[25]
Dhariwal and A
P. Dhariwal and A. Nichol. Diffusion models beat gans on image synthesis. InProceedings of the 35th International Conference on Neural Information Processing Systems, pages 8780–8794, Vancouver, Canada, 2021
2021
- [26]
- [27]
-
[28]
Diffusion Posterior Sampling for General Noisy Inverse Problems
H. Chung, J. Kim, M. T. Mccann, M. L. Klasky, and J. C. Ye. Diffusion posterior sampling for general noisy inverse problems.arXiv preprint arXiv:2209.14687, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[29]
J. Song, A. Vahdat, M. Mardani, and J. Kautz. Pseudoinverse-guided diffusion models for inverse problems. InProceedings of the International Conference on Learning Representations, Kigali, Rwanda, 2023
2023
- [30]
-
[31]
T. Pearce, T. Rashid, A. Kanervisto, D. Bignell, M. Sun, R. Georgescu, S. V . Macua, S. Z. Tan, I. Momennejad, K. Hofmann, et al. Imitating human behaviour with diffusion models.arXiv preprint arXiv:2301.10677, 2023
-
[32]
Ross, S., Gordon, G., and Bagnell, D
M. Reuss, M. Li, X. Jia, and R. Lioutikov. Goal-conditioned imitation learning using score-based diffusion policies.arXiv preprint arXiv:2304.02532, 2023
-
[33]
Real-Time Execution of Action Chunking Flow Policies
K. Black, M. Y . Galliker, and S. Levine. Real-time execution of action chunking flow policies. arXiv preprint arXiv:2506.07339, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[34]
Dzanic, K
T. Dzanic, K. Shah, and F. Witherden. Fourier spectrum discrepancies in deep network generated images. InProceedings of the 34th International Conference on Neural Information Processing Systems, pages 3022–3032, Vancouver, Canada, 2020. 10
2020
-
[35]
Schwarz, Y
K. Schwarz, Y . Liao, and A. Geiger. On the frequency bias of generative models. InProceedings of the 35th International Conference on Neural Information Processing Systems, pages 18126– 18136, Vancouver, Canada, 2021
2021
-
[36]
R. Gal, D. C. Hochberg, A. Bermano, and D. Cohen-Or. Swagan: A style-based wavelet-driven generative model.ACM Transactions on Graphics, 40(4):1–11, 2021
2021
-
[37]
Hoogeboom, J
E. Hoogeboom, J. Heek, and T. Salimans. simple diffusion: End-to-end diffusion for high resolution images. InProceedings of the International Conference on Machine Learning, pages 13213–13232, Honolulu, HI, USA, 2023
2023
-
[38]
T. Jiralerspong, B. Earnshaw, J. Hartford, Y . Bengio, and L. Scimeca. Shaping inductive bias in diffusion models through frequency-based noise control.arXiv preprint arXiv:2502.10236, 2025
- [39]
- [40]
-
[41]
FAST: Efficient Action Tokenization for Vision-Language-Action Models
K. Pertsch, K. Stachowicz, B. Ichter, D. Driess, S. Nair, Q. Vuong, O. Mees, C. Finn, and S. Levine. Fast: Efficient action tokenization for vision-language-action models.arXiv preprint arXiv:2501.09747, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[42]
C. R. Qi, L. Yi, H. Su, and L. J. Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. InProceedings of the 31st International Conference on Neural Information Processing Systems, pages 5099–5108, Long Beach, CA, USA, 2017
2017
-
[43]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware. InProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, 2023
2023
-
[44]
A. Haar. Zur theorie der orthogonalen funktionensysteme.Mathematische Annalen, 69(3): 331–371, 1909
1909
-
[45]
R. S. Stankovi´c and B. J. Falkowski. The haar wavelet transform: its status and achievements. Computers & Electrical Engineering, 29(1):25–44, 2003. 11 A Derivation ofA k,f t fromA k t andA 0 t For a full-frequency action trajectory A0 t , its frequency-truncated counterpart A0,f t is defined via a low-pass filter Lf at cut-off frequency f. We can equiva...
2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.