Loosely Coupled Factor Graph Optimization for Pseudolite-Augmented Navigation
Pith reviewed 2026-06-30 00:46 UTC · model grok-4.3
The pith
Loosely coupled factor graph optimization fuses GNSS and pseudolite least-squares solutions with IMU data to cut mean 3D positioning error 22.8 to 41.3 percent versus standard least-squares methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that its loosely coupled factor graph optimization, which treats GNSS and pseudolite least-squares solutions as factors alongside IMU measurements, achieves a 22.8% to 41.3% reduction in mean 3D error compared to standard least-squares methods. It further claims that adding pseudolite transmitters improves accuracy over a GNSS-IMU baseline, with the degree of improvement depending on transmitter geometry.
What carries the argument
Loosely coupled factor graph optimization that incorporates least-squares position estimates as factors with IMU data.
If this is right
- Positioning error drops in GNSS-degraded settings with limited satellite visibility.
- Pseudolite addition yields further accuracy gains beyond GNSS-IMU fusion alone.
- The size of the improvement varies with the geometric arrangement of the pseudolites.
- The method maintains its advantage across an 80-second time window.
Where Pith is reading between the lines
- The same loose coupling structure could be tested with additional pseudolites or other ranging sources.
- Pseudolite placement planning based on geometry might be used to maximize the observed gains.
- The framework may apply to urban or indoor navigation where satellite signals are obstructed.
Load-bearing premise
The least-squares solutions computed from four GNSS satellites plus up to two pseudolites remain sufficiently accurate and unbiased inputs for the factor graph to correct over the 80 s window.
What would settle it
A dataset from four GNSS satellites and two pseudolites over 80 seconds where the factor graph optimization produces no mean 3D error reduction or reductions below 22.8 percent compared to the input least-squares solutions.
Figures

read the original abstract
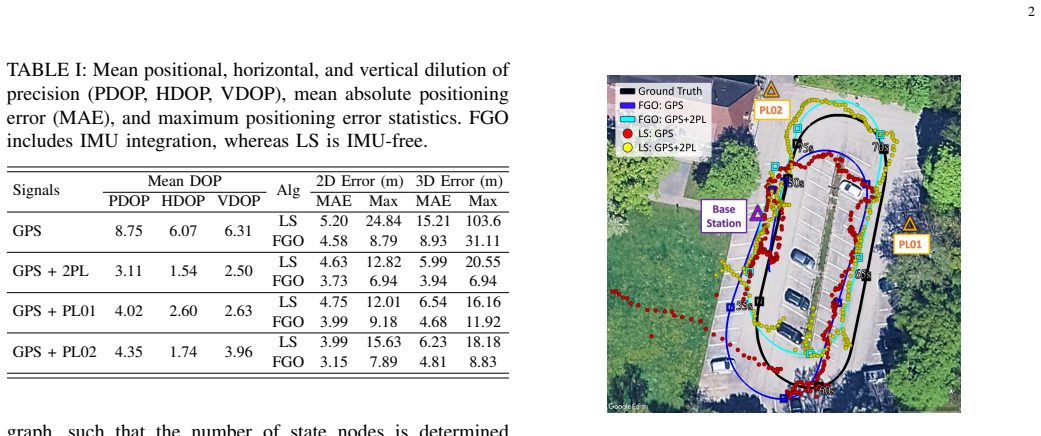
In Global Navigation Satellite System (GNSS)-degraded environments, pseudolites (PLs) provide additional signal sources to enhance positioning performance, but their integration in optimization-based frameworks remains limited. This paper presents a loosely coupled factor graph optimization (FGO) framework that fuses the GNSS/PL least-squares (LS) solutions with inertial measurement unit (IMU) data. The evaluation considers low GNSS visibility scenarios with four high-elevation GNSS satellites and up to two PL transmitters over an 80~s window. FGO achieves a 22.8\% to 41.3\% reduction in mean 3D error compared to standard LS methods. Compared to a GNSS-IMU baseline, incorporating PL transmitters further improves positioning accuracy, with performance depending on geometry.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a loosely coupled factor graph optimization (FGO) framework fusing GNSS/pseudolite (PL) least-squares (LS) position solutions with IMU data to improve navigation in GNSS-degraded environments. Evaluation focuses on low-visibility cases using four high-elevation GNSS satellites plus up to two PL transmitters over 80 s windows; the central claim is a 22.8%–41.3% reduction in mean 3D error versus plain LS, with further gains over a GNSS-IMU baseline that depend on geometry.
Significance. If the empirical gains prove robust, the work supplies a practical, loosely coupled route for adding PL signals to optimization-based navigation pipelines without requiring raw-pseudorange factors. The geometry-dependent results highlight a concrete operational regime where PL augmentation can help, which is useful for field robotics and urban navigation applications.
major comments (2)
- [Abstract] Abstract: the headline 22.8%–41.3% mean 3D error reduction is stated without error bars, number of trials, statistical tests, or trajectory plots, so it is impossible to judge whether the reported percentages are statistically distinguishable from the LS baseline.
- [Abstract] Abstract (and implied methods): the loosely coupled architecture treats per-epoch LS fixes (computed from only four GNSS + ≤2 PLs) as direct measurements; any residual clock, tropospheric or geometry bias in those fixes is therefore propagated unchanged into the FGO. The manuscript supplies no analysis showing that these LS solutions remain sufficiently unbiased over the 80 s window for the claimed improvement to be attributable to the factor-graph formulation rather than to the quality of the input fixes.
minor comments (1)
- The abstract would be clearer if it briefly indicated how the LS position solutions are converted into factors and what IMU pre-integration or bias-state model is employed inside the graph.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract and the implications of the loosely coupled architecture. We address each major comment below and indicate where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline 22.8%–41.3% mean 3D error reduction is stated without error bars, number of trials, statistical tests, or trajectory plots, so it is impossible to judge whether the reported percentages are statistically distinguishable from the LS baseline.
Authors: We agree that the abstract would benefit from greater transparency on the experimental statistics. The reported reductions are obtained from repeated evaluations across multiple 80 s windows under the specified low-visibility geometry. We will revise the abstract to state the number of trials performed and reference the error bars, statistical comparisons, and trajectory plots already present in the results section, enabling readers to assess distinguishability from the LS baseline. revision: yes
-
Referee: [Abstract] Abstract (and implied methods): the loosely coupled architecture treats per-epoch LS fixes (computed from only four GNSS + ≤2 PLs) as direct measurements; any residual clock, tropospheric or geometry bias in those fixes is therefore propagated unchanged into the FGO. The manuscript supplies no analysis showing that these LS solutions remain sufficiently unbiased over the 80 s window for the claimed improvement to be attributable to the factor-graph formulation rather than to the quality of the input fixes.
Authors: The loosely coupled formulation is chosen precisely to integrate existing LS position solutions with IMU data without requiring raw pseudorange factors. The FGO enforces consistency across epochs via IMU preintegration, which can reduce the influence of per-epoch LS errors. We acknowledge that the current manuscript does not contain an explicit bias-propagation study. We will add a dedicated paragraph in the methods section that quantifies typical LS biases under the four-GNSS-plus-PL geometry and demonstrates, via comparison against a non-optimized fusion baseline, that the observed gains exceed those attributable to input quality alone. revision: yes
Circularity Check
No circularity: empirical comparison of estimators on shared data
full rationale
The paper reports an empirical evaluation of loosely-coupled FGO versus plain LS on the same GNSS/PL+IMU dataset in low-visibility conditions. The central performance numbers (22.8–41.3 % mean 3-D error reduction) are measured outcomes of running two estimators on identical inputs; no equation, parameter fit, or self-citation is shown to define the reported metric by construction. The method description fuses per-epoch LS fixes as measurements inside the graph, but the claimed improvement is an observed difference, not a tautology. No load-bearing self-citation, ansatz smuggling, or renaming of known results appears in the provided text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Gnss position in- tegrity in urban environments: A review of literature,
N. Zhu, J. Marais, D. Betaille, and M. Berbineau, “Gnss position in- tegrity in urban environments: A review of literature,”IEEE Transactions on Intelligent Transportation Systems, vol. 19, no. 9, pp. 2762–2778, 2018
2018
-
[2]
Pseudolites to support location services in smart cities: Review and prospects,
T. Liu, J. Liu, J. Wang, H. Zhang, B. Zhang, Y . Ma, M. Sun, Z. Lv, and G. Xu, “Pseudolites to support location services in smart cities: Review and prospects,”Smart Cities, vol. 6, no. 4, pp. 2081–2105, 2023
2081
-
[3]
Estimation techniques for low-cost inertial navigation,
E.-H. Shin, “Estimation techniques for low-cost inertial navigation,” Ph.D. dissertation, University of Calgary, Calgary, Canada, 2005
2005
-
[4]
Indoor position- ing with smartphone by using doppler observations from asynchronous pseudolite system,
X. Lu, L. Chen, N. Shen, Y . Dai, T. Zhou, and R. Chen, “Indoor position- ing with smartphone by using doppler observations from asynchronous pseudolite system,”IEEE Internet of Things Journal, 2024
2024
-
[5]
High- precision indoor positioning technology based on multi-channel array pseudolite,
L. Huang, B. Yu, Y . Li, H. Zhang, J. Cheng, X. Liang, and S. Liu, “High- precision indoor positioning technology based on multi-channel array pseudolite,”IEEE Transactions on Instrumentation and Measurement, vol. 74, 2025
2025
-
[6]
Dellaert and M
F. Dellaert and M. Kaess,Factor Graphs for Robot Perception. Foundations and Trends in Robotics, V ol. 6, 2017. [Online]. Available: http://www.cs.cmu.edu/∼kaess/pub/Dellaert17fnt.pdf
2017
-
[7]
Gnss/multisen- sor fusion using continuous-time factor graph optimization for robust localization,
H. Zhang, C.-C. Chen, H. Vallery, and T. D. Barfoot, “Gnss/multisen- sor fusion using continuous-time factor graph optimization for robust localization,”IEEE Transactions on Robotics, vol. 40, pp. 4003–4023, 2024
2024
-
[8]
Factor graph optimization for gnss/ins integration: A comparison with the extended kalman filter,
W. Wen, T. Pfeifer, X. Bai, and L.-T. Hsu, “Factor graph optimization for gnss/ins integration: A comparison with the extended kalman filter,” NA VIGATION: Journal of the Institute of Navigation, vol. 68, no. 2, pp. 315–331, 2021
2021
-
[9]
Imu preinte- gration on manifold for efficient visual-inertial maximum-a-posteriori estimation,
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “Imu preinte- gration on manifold for efficient visual-inertial maximum-a-posteriori estimation,” inRobotics: Science and Systems XI, 2015
2015
-
[10]
Low-cost pseudolites: a loop-back time synchronization scheme for pseudolites using real-time clock offset calibration for reliable PNT,
M. S. Hameed, M. Philips-Blum, T. Pany, D. Sanroma, and S. Lakshma- iah, “Low-cost pseudolites: a loop-back time synchronization scheme for pseudolites using real-time clock offset calibration for reliable PNT,” in Proceedings of the 37th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2024), 2024, pp. 1444–1460
2024
-
[11]
Development and Demonstration of Compact Galileo E1/E6 Pseudolite with online Synchronization to GNSS time,
D. Sanroma, S. Lakshmaiah, M. S. Hameed, M. Philips-Blum, and T. Pany, “Development and Demonstration of Compact Galileo E1/E6 Pseudolite with online Synchronization to GNSS time,”European Jour- nal of Navigation, vol. 24, no. 3, pp. 20–30, 2024
2024
-
[12]
Validation of Pseudolites with a loop-back time synchronization scheme using a GNSS signal simulator,
M. S. Hameed, M. Philips-Blum, T. Pany, D. Sanroma, and S. Laksh- maiah, “Validation of Pseudolites with a loop-back time synchronization scheme using a GNSS signal simulator,” in2025 IEEE/ION Position, Location and Navigation Symposium (PLANS), 2025
2025
-
[13]
borglab/gtsam,
F. Dellaert and G. Contributors, “borglab/gtsam,” May 2022. [Online]. Available: https://github.com/borglab/gtsam)
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.