Towards Initialization-free Calibrated Bundle Adjustment
Pith reviewed 2026-05-22 12:51 UTC · model grok-4.3
The pith
Pairwise relative rotation estimates let the pOSE objective incorporate camera calibration for near-metric reconstructions from random starts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By integrating pairwise relative rotation estimates that encode calibration into the pseudo Object Space Error objective, the optimization problem becomes invariant only to similarity transformations instead of full projective transformations, so that random initial solutions converge with high probability to globally optimal near-metric reconstructions.
What carries the argument
Pairwise relative rotation estimates integrated into the pOSE framework; these estimates are similarity-invariant and thereby inject calibration constraints that the original projective pOSE lacks.
If this is right
- The method converges to the global minimum with high probability when started from random initial solutions.
- Reconstructions are accurate up to a similarity transformation rather than a full projective transformation.
- The approach merges ideas from rotation averaging with the pOSE surrogate to achieve calibrated structure-from-motion without initialization.
- Fewer images are needed for reliable reconstruction than with the uncalibrated projective pOSE version.
Where Pith is reading between the lines
- SfM pipelines could potentially drop separate initialization stages if the rotation estimates prove robust across varied scenes.
- The same pattern of injecting limited invariance through auxiliary estimates might be tried on other projective objectives to add metric constraints.
- Testing how the noise level in the supplied rotation estimates affects the size of the basin of attraction for the global minimum would be a direct next measurement.
Load-bearing premise
Reliable pairwise relative rotation estimates that carry calibration information can be obtained and added to the pOSE objective without introducing errors that stop convergence or destroy metric accuracy.
What would settle it
A collection of image sets where repeated random-start optimizations consistently fail to reach a near-metric solution or produce large reconstruction errors would show that the integrated objective does not reliably attain the global minimum.
Figures

read the original abstract
A recent series of works has shown that initialization-free BA can be achieved using pseudo Object Space Error (pOSE) as a surrogate objective. The initial reconstruction-step optimizes an objective where all terms are projectively invariant and it cannot incorporate knowledge of the camera calibration. As a result, the solution is only determined up to a projective transformation of the scene and the process requires more data for successful reconstruction. In contrast, we present a method that is able to use the known camera calibration thereby producing near metric solutions, that is, reconstructions that are accurate up to a similarity transformation. To achieve this we introduce pairwise relative rotation estimates that carry information about camera calibration. These are only invariant to similarity transformations, thus encouraging solutions that preserve metric features of the real scene. Our method can be seen as integrating rotation averaging into the pOSE framework striving towards initialization-free calibrated SfM. Our experimental evaluation shows that we are able to reliably optimize our objective, achieving convergence to the global minimum with high probability from random starting solutions, resulting in accurate near metric reconstructions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript extends the pseudo Object Space Error (pOSE) framework for initialization-free bundle adjustment by incorporating pairwise relative rotation estimates that encode camera calibration. These terms break projective invariance and encourage solutions that are accurate up to similarity (near-metric reconstructions). The central claim is that the resulting objective can be optimized reliably from random initializations, converging to the global minimum with high probability and producing accurate near-metric 3D reconstructions.
Significance. If the claims are substantiated, the work would advance initialization-free SfM by enabling calibrated, near-metric output without separate rotation averaging or metric upgrade steps, potentially lowering data requirements relative to pure projective pOSE methods.
major comments (2)
- [Abstract] Abstract: the claim of 'convergence to the global minimum with high probability from random starting solutions' and 'accurate near metric reconstructions' is presented without any quantitative metrics, success rates, error statistics, or ablation results; this directly underpins the central experimental claim and requires supporting data.
- [Method] The integration of separately estimated pairwise relative rotations into the pOSE objective (described as similarity-invariant and carrying calibration information) lacks any analysis or bound on tolerable rotation error; inconsistencies between the rotation graph and projective tracks could introduce spurious minima, undermining the high-probability global convergence guarantee.
minor comments (2)
- Notation for the combined objective could be made more explicit when first introduced, particularly the weighting between pOSE terms and the new rotation terms.
- The manuscript would benefit from a short related-work paragraph contrasting the approach with existing rotation-averaging + BA pipelines.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of our claims and method that we will address to strengthen the presentation. We respond point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of 'convergence to the global minimum with high probability from random starting solutions' and 'accurate near metric reconstructions' is presented without any quantitative metrics, success rates, error statistics, or ablation results; this directly underpins the central experimental claim and requires supporting data.
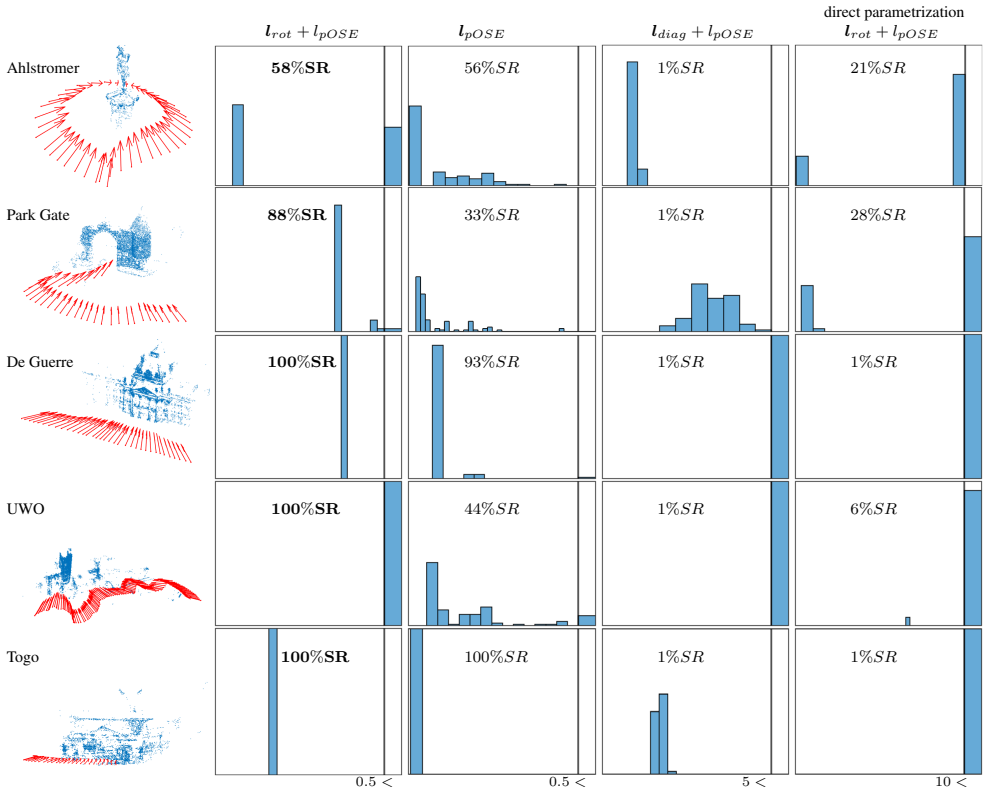
Authors: We agree that the abstract would be strengthened by including quantitative support for the central claims. The full manuscript already contains these details in Section 4, including success rates from random initializations (typically above 85% across datasets), mean rotation/translation errors, and ablation studies. We will revise the abstract to incorporate brief references to these key statistics and success rates. revision: yes
-
Referee: [Method] The integration of separately estimated pairwise relative rotations into the pOSE objective (described as similarity-invariant and carrying calibration information) lacks any analysis or bound on tolerable rotation error; inconsistencies between the rotation graph and projective tracks could introduce spurious minima, undermining the high-probability global convergence guarantee.
Authors: We appreciate this observation. The reported high-probability convergence is an empirical finding based on extensive experiments with random starts and real-world rotation estimates; it is not presented as a theoretical guarantee. The projective invariance of the pOSE terms provides a natural regularizing effect that mitigates inconsistencies with the rotation graph in practice. We will add a dedicated discussion subsection and new ablation experiments with controlled synthetic rotation noise to characterize robustness, though a closed-form theoretical bound on tolerable error remains outside the current scope. revision: partial
- A rigorous theoretical bound on tolerable rotation error that prevents spurious minima in the combined objective.
Circularity Check
No significant circularity; derivation extends pOSE with independent rotation terms
full rationale
The paper defines its objective by augmenting the existing pOSE surrogate (from prior literature) with pairwise relative rotation estimates that encode calibration information and break projective invariance. These rotations are obtained separately and inserted as additional terms; the resulting joint energy is then optimized, with global convergence claims resting on experimental trials from random starts rather than any algebraic reduction to fitted inputs or self-referential definitions. No step equates a claimed prediction to its own construction, and the cited pOSE foundation is treated as an external starting point rather than a load-bearing self-citation chain that collapses the new contribution.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Known camera calibration is available and can be used to compute relative rotations that are similarity-invariant.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We present a method that is able to use the known camera calibration thereby producing near metric solutions... introduce pairwise relative rotation estimates... integrating rotation averaging into the pOSE framework
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the solution is only determined up to a projective transformation... reduce the projective invariance to a similarity transformation
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Towards Initialization-free Calibrated Bundle Adjustment
Introduction Bundle adjustment [1, 5, 15, 22, 41, 56] and similar opti- mization formulations are key components in systems that solve Structure from Motion (SfM) and Simultaneous Lo- calization and Mapping (SLAM) problems [2, 39, 43, 45, 48, 52, 55]. The optimization problem is well known to be non-convex with numerous local minima thus requiring a suita...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
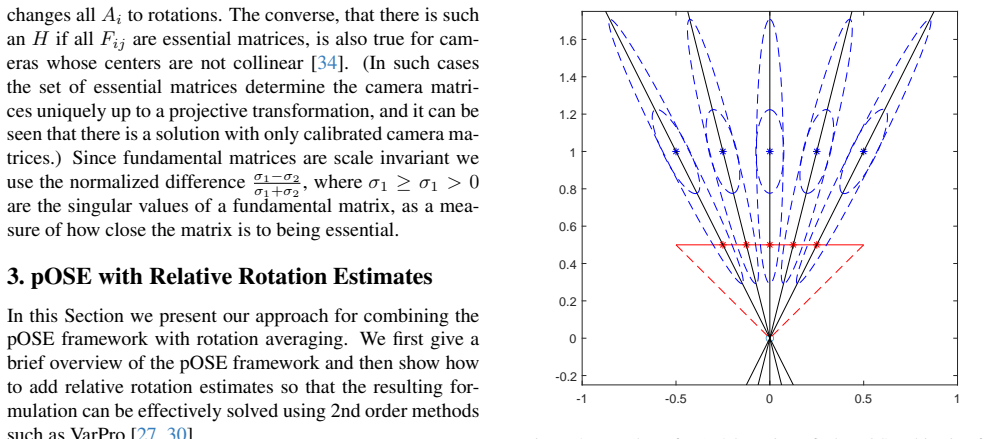
Projective Ambiguity and Upgrades In this Section we give a short review of projective ambigu- ity in uncalibrated SfM and the traditional way of resolving this through upgrades. We then present our approach for resolving this ambiguity through the inclusion of relative rotation estimates. 2.1. Uncalibrated Reconstruction Given a number of 2D image projec...
-
[3]
pOSE with Relative Rotation Estimates In this Section we present our approach for combining the pOSE framework with rotation averaging. We first give a brief overview of the pOSE framework and then show how to add relative rotation estimates so that the resulting for- mulation can be effectively solved using 2nd order methods such as VarPro [27, 30]. 3.1....
-
[4]
The ob- jective thus depends on R, t and the parameters of the 3D points
we can assume that the first camera is I 0 and the second is R t , with R ∈ SO(3) and ∥t∥2 = 1. The ob- jective thus depends on R, t and the parameters of the 3D points. We let v be a vector containing t and the parame- ters of all 3D points visible in the two cameras. Further, we let r(R, v) be a vector containing all reprojection residuals and write ∥r(...
-
[5]
To simplify notation we define the block matrices B = R1 R2
Optimization Method In this section we describe the method that we use to opti- mize (4). To simplify notation we define the block matrices B = R1 R2 ... , t = t1 t2 ... and C T = u1 u2 . . . . (16) Here ui are regular Cartesian 3D coordinates for point i. If 1 is a vector of ones thenX = BC T + t1T is the block ma- trix that contain a...
-
[6]
For comparison we also test two modifications
Experiments To evaluate the effects of incorporating rotation averaging in the pOSE framework we have test the pOSE model us- ing the objective lpOSE (9) and our proposed method in- corporating rotation averaging by adding the lrot penalty to lpOSE , giving the objective (15). For comparison we also test two modifications. The first one only adds a penalt...
-
[7]
Conclusions In this paper we have presented an extension of the pOSE framework that provides near metric reconstructions. Our method combines pOSE with rotation averaging by incor- porating relative rotation estimates into the objective func- tion. Since the new error residuals are only invariant to sim- ilarity transformations the result is a visually ac...
work page 2021
-
[8]
Sameer Agarwal, Noah Snavely, Steven M. Seitz, and Richard Szeliski. Bundle adjustment in the large. In Pro- ceedings of the 11th European Conference on Computer Vision: Part II , page 29–42, Berlin, Heidelberg, 2010. Springer-Verlag. 1
work page 2010
-
[9]
Sameer Agarwal, Yasutaka Furukawa, Noah Snavely, Ian Si- mon, Brian Curless, Steven M. Seitz, and Richard Szeliski. Building rome in a day. Commun. ACM , 54(10):105–112,
-
[10]
Kovalsky, Ira Kemelmacher-Shlizerman, Amit Singer, and Ronen Basri
Mica Arie-Nachimson, Shahar Z. Kovalsky, Ira Kemelmacher-Shlizerman, Amit Singer, and Ronen Basri. Global motion estimation from point matches. In 2012 Second International Conference on 3D Imaging, Modeling, Processing, Visualization & Transmission , pages 81–88, 2012. 1
work page 2012
-
[11]
Cartan-sync: Fast and global se(d)-synchronization
Jesus Briales and Javier Gonz ´alez-Jim´enez. Cartan-sync: Fast and global se(d)-synchronization. IEEE Robotics and Automation Letters, PP:1–1, 2017. 1
work page 2017
-
[12]
Conjugate gradient bundle adjustment
Martin Byr ¨od and Kalle ˚Astr¨om. Conjugate gradient bundle adjustment. In Proceedings of the 11th European Conference on Computer Vision: Part II , page 114–127, Berlin, Heidel- berg, 2010. Springer-Verlag. 1
work page 2010
-
[13]
Luca Carlone, Roberto Tron, Kostas Daniilidis, and Frank Dellaert. Initialization techniques for 3d slam: A survey on rotation estimation and its use in pose graph optimization. Proceedings - IEEE International Conference on Robotics and Automation, 2015:4597–4604, 2015. 1
work page 2015
-
[14]
A. Chatterjee and V . Govindu. Robust relative rotation aver- aging. IEEE Transactions on Pattern Analysis and Machine Intelligence, 40(4):958–972, 2017
work page 2017
-
[15]
Hybrid rotation av- eraging: A fast and robust rotation averaging approach
Yu Chen, Ji Zhao, and Laurent Kneip. Hybrid rotation av- eraging: A fast and robust rotation averaging approach. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR) , pages 10358–10367,
-
[16]
K. Cornelis, F. Verbiest, and L. Van Gool. Drift detection and removal for sequential structure from motion algorithms. IEEE Transactions on Pattern Analysis and Machine Intelli- gence, 26(10):1249–1259, 2004. 1
work page 2004
-
[17]
Robust global translation averaging with feature tracks
Hainan Cui, Shuhan Shen, and Zhanyi Hu. Robust global translation averaging with feature tracks. In 2016 23rd Inter- national Conference on Pattern Recognition (ICPR) , pages 3727–3732, 2016. 1
work page 2016
-
[18]
Global structure-from-motion by similarity averaging
Zhaopeng Cui and Ping Tan. Global structure-from-motion by similarity averaging. In 2015 IEEE International Confer- ence on Computer Vision (ICCV) , pages 864–872, 2015
work page 2015
-
[19]
Linear global translation estimation with feature tracks
Zhaopeng Cui, Nianjuan Jiang, Chengzhou Tang, and Ping Tan. Linear global translation estimation with feature tracks. In BMVC, pages 46.1–46.13. BMV A Press, 2015. 1
work page 2015
-
[20]
Rotation averaging with application to camera-rig calibration
Yuchao Dai, Jochen Trumpf, Hongdong Li, Nick Barnes, and Richard Hartley. Rotation averaging with application to camera-rig calibration. In Computer Vision – ACCV 2009,
work page 2009
-
[21]
Frank Dellaert, David M. Rosen, Jing Wu, Robert E. Ma- hony, and Luca Carlone. Shonan rotation averaging: Global optimality by surfing so(p)n. CoRR, abs/2008.02737, 2020. 1
-
[22]
Chris Engels, Henrik Stew ´enius, and David Nist ´er. Bundle adjustment rules. 2006. 1
work page 2006
-
[23]
Non-sequential structure from motion
Olof Enqvist, Fredrik Kahl, and Carl Olsson. Non-sequential structure from motion. In 2011 IEEE International Con- ference on Computer Vision Workshops (ICCV Workshops) , pages 264–271, 2011. 1
work page 2011
-
[24]
Anders Eriksson, Carl Olsson, Fredrik Kahl, and Tat-Jun Chin. Rotation averaging with the chordal distance: Global minimizers and strong duality.IEEE Transactions on Pattern Analysis and Machine Intelligence, 43(1):256–268, 2021. 1
work page 2021
-
[25]
Stratification of three-dimensional vision: projective, affine, and metric representations
Olivier Faugeras. Stratification of three-dimensional vision: projective, affine, and metric representations. Journal of the Optical Society of America A , 12(3):465–484, 1995. 2
work page 1995
-
[26]
3-d reconstruction of urban scenes from image sequences
Olivier Faugeras, Luc Robert, St ´ephane Laveau, Gabriella Csurka, Cyril Zeller, Cyrille Gauclin, and Imad Zoghlami. 3-d reconstruction of urban scenes from image sequences. Computer vision and image understanding , 69(3):292–309,
-
[27]
Simultaneous multiple rotation averaging using lagrangian duality
Johan Fredriksson and Carl Olsson. Simultaneous multiple rotation averaging using lagrangian duality. In Computer Vision – ACCV 2012 , pages 245–258, Berlin, Heidelberg,
work page 2012
-
[28]
Springer Berlin Heidelberg. 1
- [29]
-
[30]
Multiple View Ge- ometry in Computer Vision
Richard Hartley and Andrew Zisserman. Multiple View Ge- ometry in Computer Vision . Cambridge University Press, New York, NY , USA, 2 edition, 2003. 1, 2, 3, 4
work page 2003
-
[31]
R.I. Hartley, E. Hayman, L. de Agapito, and I. Reid. Camera calibration and the search for infinity. In Proceedings of the Seventh IEEE International Conference on Computer Vision, pages 510–517 vol.1, 1999. 2
work page 1999
-
[32]
Richard Hartley, Jochen Trumpf, Yuchao Dai, and Hongdong Li. Rotation averaging. International Journal of Computer Vision, 103(3):267 – 305, 2013. 1
work page 2013
-
[33]
Richard I. Hartley and Peter Sturm. Triangulation. Computer Vision and Image Understanding, 68(2):146 – 157, 1997. 1
work page 1997
-
[34]
Hartley, Khurrum Aftab, and Jochen Trumpf
Richard I. Hartley, Khurrum Aftab, and Jochen Trumpf. L1 rotation averaging using the weiszfeld algorithm. CVPR 2011, pages 3041–3048, 2011. 1
work page 2011
-
[35]
Je Hyeong Hong and Andrew Fitzgibbon. Secrets of ma- trix factorization: Approximations, numerics, manifold op- timization and random restarts. In Int. Conf. on Computer Vision, 2015. 4
work page 2015
-
[36]
pose: Pseudo object space error for initialization-free bundle adjustment
Je Hyeong Hong and Christopher Zach. pose: Pseudo object space error for initialization-free bundle adjustment. In Pro- ceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2018. 1, 2, 4
work page 2018
-
[37]
Fitzgibbon, and Roberto Cipolla
Je Hyeong Hong, Christopher Zach, Andrew W. Fitzgibbon, and Roberto Cipolla. Projective bundle adjustment from ar- bitrary initialization using the variable projection method. In European Conf. on Computer Vision, 2016. 1
work page 2016
-
[38]
J. H. Hong, C. Zach, and A. Fitzgibbon. Revisiting the vari- able projection method for separable nonlinear least squares problems. In 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 5939–5947, 2017. 2, 4, 5
work page 2017
-
[39]
Radial distortion in- variant factorization for structure from motion
Jos ´e Pedro Iglesias and Carl Olsson. Radial distortion in- variant factorization for structure from motion. In 2021 IEEE/CVF International Conference on Computer Vision (ICCV), pages 5886–5895, 2021. 1
work page 2021
-
[40]
ex- pose: Accurate initialization-free projective factorization using exponential regularization
Jos ´e Pedro Iglesias, Amanda Nilsson, and Carl Olsson. ex- pose: Accurate initialization-free projective factorization using exponential regularization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 8959–8968, 2023. 1
work page 2023
-
[41]
Multiple-view geometry under the L∞-norm
Fredrik Kahl and Richard Hartley. Multiple-view geometry under the L∞-norm. IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(9):1603–1617, 2008. 1
work page 2008
-
[42]
Algebraic characterization of essential matrices and their averaging in multiview settings
Yoni Kasten, Amnon Geifman, Meirav Galun, and Ronen Basri. Algebraic characterization of essential matrices and their averaging in multiview settings. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2019. 4
work page 2019
-
[43]
Ryan Kennedy, Kostas Daniilidis, Oleg Naroditsky, and Camillo J. Taylor. Identifying maximal rigid components in bearing-based localization. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages 194– 201, 2012. 1
work page 2012
-
[44]
Correspon- dence reweighted translation averaging
Lalit Manam and Venu Madhav Govindu. Correspon- dence reweighted translation averaging. In Computer Vi- sion – ECCV 2022: 17th European Conference, Tel Aviv, Is- rael, October 23–27, 2022, Proceedings, Part XXXIII , page 56–72, Berlin, Heidelberg, 2022. Springer-Verlag. 1
work page 2022
-
[45]
Robust rotation and translation estimation in multiview reconstruction
Daniel Martinec and Tomas Pajdla. Robust rotation and translation estimation in multiview reconstruction. In 2007 IEEE Conference on Computer Vision and Pattern Recogni- tion, pages 1–8, 2007. 1
work page 2007
-
[46]
Rotation averaging in a split second: A primal-dual method and a closed-form for cycle graphs
Gabriel Moreira, Manuel Marques, and Jo ˜ao Paulo Costeira. Rotation averaging in a split second: A primal-dual method and a closed-form for cycle graphs. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 5452–5460, 2021. 1
work page 2021
-
[47]
Global Fusion of Relative Motions for Robust, Accurate and Scal- able Structure from Motion
Pierre Moulon, Pascal Monasse, and Renaud Marlet. Global Fusion of Relative Motions for Robust, Accurate and Scal- able Structure from Motion. InProceedings of IEEE Interna- tional Conference on Computer Vision, page to appear, Syd- ney, Australia, 2013. 1
work page 2013
-
[48]
A generalized projective reconstruction theorem and depth constraints for projective factorization
Behrooz Nasihatkon, Richard Hartley, and Jochen Trumpf. A generalized projective reconstruction theorem and depth constraints for projective factorization. Int. J. Comput. Vi- sion, 115(2):87–114, 2015. 3
work page 2015
-
[49]
Out-of-core bun- dle adjustment for large-scale 3d reconstruction
Kai Ni, Drew Steedly, and Frank Dellaert. Out-of-core bun- dle adjustment for large-scale 3d reconstruction. In 2007 IEEE 11th International Conference on Computer Vision , pages 1–8, 2007. 1
work page 2007
-
[50]
An efficient solution to the five-point relative pose problem
David Nist ´er. An efficient solution to the five-point relative pose problem. IEEE Transactions on Pattern Analysis and Machine Intelligence, 26:756–770, 2004. 1
work page 2004
-
[51]
Stable structure from motion for unordered image collections
Carl Olsson and Olof Enqvist. Stable structure from motion for unordered image collections. In Image Analysis, pages 524–535, Berlin, Heidelberg, 2011. Springer Berlin Heidel- berg. 1
work page 2011
-
[52]
Carl Olsson, Anders Eriksson, and Richard Hartley. Outlier removal using duality. In 2010 IEEE Computer Society Con- ference on Computer Vision and Pattern Recognition , pages 1450–1457, 2010. 1
work page 2010
-
[53]
Linfei Pan, D ´aniel Bar´ath, Marc Pollefeys, and Johannes L. Sch¨onberger. Global structure-from-motion revisited, 2024. 1
work page 2024
-
[54]
Rotation coordinate descent for fast globally optimal rotation averaging
Alvaro Parra, Shin-Fang Chng, Tat-Jun Chin, Anders Eriks- son, and Ian Reid. Rotation coordinate descent for fast globally optimal rotation averaging. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 4298–4307, 2021. 1
work page 2021
-
[55]
A stratified approach to metric self-calibration
Marc Pollefeys and Luc Van Gool. A stratified approach to metric self-calibration. In Proceedings of IEEE computer so- ciety conference on computer vision and pattern recognition, pages 407–412. IEEE, 1997. 2
work page 1997
-
[56]
M. Pollefeys, D. Nist ´er, J. M. Frahm, A. Akbarzadeh, P. Mor- dohai, B. Clipp, C. Engels, D. Gallup, S. J. Kim, P. Mer- rell, C. Salmi, S. Sinha, B. Talton, L. Wang, Q. Yang, H. Stew´enius, R. Yang, G. Welch, and H. Towles. Detailed real- time urban 3d reconstruction from video. Int. J. Comput. Vision, 78(2–3):143–167, 2008. 1
work page 2008
-
[57]
Advances in inference and representation for si- multaneous localization and mapping
David Rosen, Kevin Doherty, Antonio Espinoza, and John Leonard. Advances in inference and representation for si- multaneous localization and mapping. Annual Review of Control, Robotics, and Autonomous Systems , 4, 2021. 1
work page 2021
-
[58]
Linear multi view re- construction and camera recovery
Carsten Rother and Stefan Carlsson. Linear multi view re- construction and camera recovery. pages 42–50 vol.1, 2001. 1
work page 2001
-
[59]
Linear multi view reconstruction with missing data
Carsten Rother and Stefan Carlsson. Linear multi view reconstruction with missing data. In Proceedings of the 7th European Conference on Computer Vision-Part II , page 309–324, Berlin, Heidelberg, 2002. Springer-Verlag. 1
work page 2002
-
[60]
Structure-from-motion revisited
Johannes Lutz Sch ¨onberger and Jan-Michael Frahm. Structure-from-motion revisited. In Conference on Com- puter Vision and Pattern Recognition (CVPR), 2016. 1
work page 2016
-
[61]
It is all in the weights: Robust rotation averaging revisited
Chitturi Sidhartha and Venu Madhav Govindu. It is all in the weights: Robust rotation averaging revisited. In 2021 International Conference on 3D Vision (3DV) , pages 1134– 1143, 2021. 1
work page 2021
-
[62]
A. Singer. Angular synchronization by eigenvectors and semidefinite programming. Applied and Computational Har- monic Analysis, 30(1):20–36, 2011. 1
work page 2011
-
[63]
Noah Snavely, Steven M. Seitz, and Richard Szeliski. Photo tourism: Exploring photo collections in 3d. In SIGGRAPH Conference Proceedings , pages 835–846, New York, NY , USA, 2006. ACM Press. 1
work page 2006
-
[64]
Bill Triggs, Philip F. McLauchlan, Richard I. Hartley, and Andrew W. Fitzgibbon. Bundle adjustment - a modern syn- thesis. In Proceedings of the International Workshop on Vision Algorithms: Theory and Practice , page 298–372, Berlin, Heidelberg, 1999. Springer-Verlag. 1
work page 1999
-
[65]
Exact and stable recovery of rotations for robust synchronization
Lanhui Wang and Amit Singer. Exact and stable recovery of rotations for robust synchronization. Information and Infer- ence: A Journal of the IMA , 2(2):145–193, 2013. 1
work page 2013
-
[66]
Power variable projection for initialization-free large-scale bundle adjustment
Simon Weber, Je Hyeong Hong, and Daniel Cremers. Power variable projection for initialization-free large-scale bundle adjustment. In Computer Vision – ECCV 2024: 18th Eu- ropean Conference, Milan, Italy, September 29–October 4, 2024, Proceedings, Part XIII, page 111–126, Berlin, Heidel- berg, 2024. Springer-Verlag. 2
work page 2024
-
[67]
On the distribution of minima in intrinsic-metric rotation averaging
Kyle Wilson and David Bindel. On the distribution of minima in intrinsic-metric rotation averaging. In 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 6030–6038, 2020. 1
work page 2020
-
[68]
When is rota- tions averaging hard? In Proceedings of ECCV 2016 , 2016
Kyle Wilson, David Bindel, and Noah Snavely. When is rota- tions averaging hard? In Proceedings of ECCV 2016 , 2016. 1
work page 2016
-
[69]
Revisit- ing rotation averaging: Uncertainties and robust losses
Ganlin Zhang, Viktor Larsson, and Daniel Barath. Revisit- ing rotation averaging: Uncertainties and robust losses. In Proceedings - 2023 IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, CVPR 2023 , pages 17215– 17224, United States, 2023. IEEE Computer Society. 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition, CVPR 2023...
work page 2023
-
[70]
A fast resection-intersection method for the known rotation prob- lem
Qianggong Zhang, Tat-Jun Chin, and Huu Minh Le. A fast resection-intersection method for the known rotation prob- lem. In 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 3012–3021, 2018. 1
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.