Safety-Critical LiDAR-Inertial Odometry with On-Manifold Deterministic Protection Level
Pith reviewed 2026-05-12 04:41 UTC · model grok-4.3
The pith
LiDAR-inertial odometry supplies deterministic protection levels by turning bounded point-cloud noise into feasible pose sets through an on-manifold filter.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
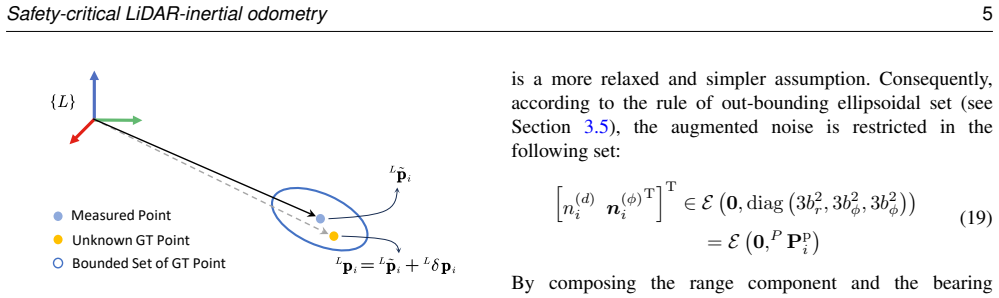
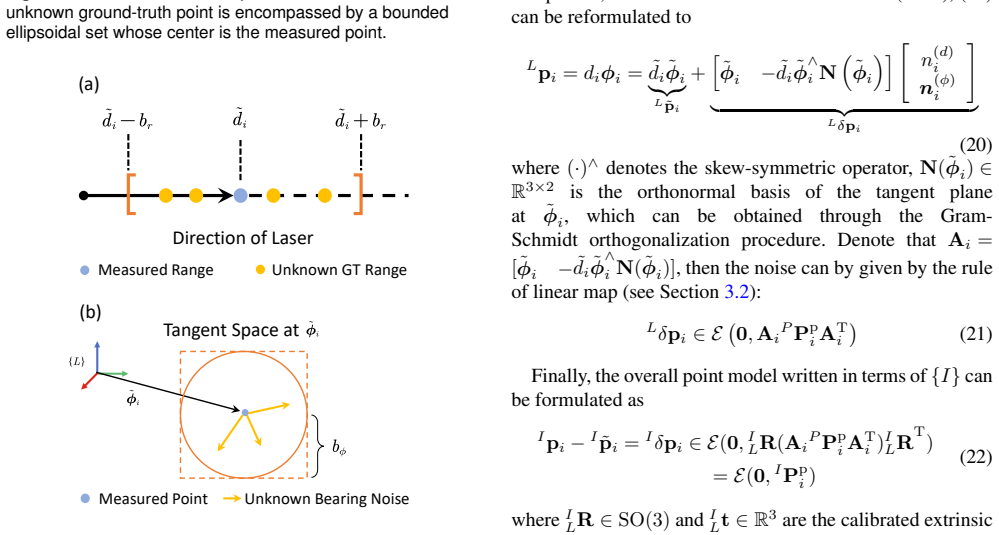
By adopting the unknown but bounded assumption, we derive a neat closed-form relationship between point cloud noise and the uncertainty of the estimation from the iterated closest point algorithm. Using this relationship, we design an on-manifold ellipsoidal set-membership filter and implement it within the LIO system. Leveraging the properties of the set-membership filter, our system offers the feasible sets of the estimated locations as the deterministic protection levels, serving as safety references for the robots' downstream autonomous operations.
What carries the argument
on-manifold ellipsoidal set-membership filter that maps bounded point-cloud noise to feasible pose sets via the closed-form ICP uncertainty relation
Load-bearing premise
The unknown-but-bounded noise model for point clouds holds in real-world environments and the derived closed-form relationship accurately propagates uncertainty through ICP without hidden fitting steps or post-hoc exclusions.
What would settle it
A controlled experiment in which artificially bounded perturbations are added to real LiDAR scans and the true robot trajectory exits the computed ellipsoidal feasible set would falsify the closed-form propagation step.
Figures





read the original abstract
In safety-critical scenarios, the protection level of the autonomous navigation system is crucial for enabling mobile robots to perform safe tasks. However, existing studies on probabilistic navigation systems for robots usually perform offline accuracy evaluations using limited datasets and assume that the results can be applied to unknown real-world environments. As a result, current autonomous mobile robots often lack protection levels for online safety assessment. To fill this gap, we propose a safety-critical LiDAR-inertial odometry (LIO) that provides deterministic protection levels based on on-manifold deterministic state estimation. By adopting the unknown but bounded assumption, we derive a neat closed-form relationship between point cloud noise and the uncertainty of the estimation from the iterated closest point algorithm. Using this relationship, we design an on-manifold ellipsoidal set-membership filter and implement it within the LIO system. Leveraging the properties of the set-membership filter, our system offers the feasible sets of the estimated locations as the deterministic protection levels, serving as safety references for the robots' downstream autonomous operations. The experimental results show that our system can provide effective deterministic online safety references for diverse robots in various environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a safety-critical LiDAR-inertial odometry (LIO) system that, under the unknown-but-bounded noise assumption, derives a closed-form relationship between point-cloud perturbations and the uncertainty of iterated closest point (ICP) pose estimates. This relationship is used to construct an on-manifold ellipsoidal set-membership filter whose feasible sets serve as deterministic protection levels for the estimated trajectory, intended to support online safety assessment without probabilistic assumptions or offline dataset calibration.
Significance. If the closed-form mapping is rigorously derived and conservative with respect to ICP's iterative correspondence updates, the work would provide a useful deterministic alternative to probabilistic protection-level methods in robotics. The on-manifold formulation and integration into a full LIO pipeline address a practical gap for safety-critical applications. The experimental claims on diverse robots and environments would be strengthened by the absence of free parameters in the core derivation, though this remains to be verified from the full equations.
major comments (2)
- [Section 3 (closed-form ICP uncertainty relationship)] The central derivation (Section 3) claims a closed-form relationship between bounded point-cloud noise and the feasible set of ICP estimates. Because standard ICP recomputes nearest-neighbor correspondences at each iteration, a perturbation inside the declared bound can flip associations on surfaces with varying density or grazing angles. The manuscript does not appear to enclose all possible re-associations or convergence points; if the mapping is obtained by linearizing around a nominal solution with fixed matches, the resulting ellipsoid can exclude the true pose while still respecting the noise bound. This directly undermines the guarantee of the protection levels supplied by the subsequent filter.
- [Section 4 (on-manifold set-membership filter)] In the on-manifold ellipsoidal set-membership filter (Section 4), the propagation step must account for the manifold retraction when correspondences change. If the linearization or ellipsoid update omits this or assumes fixed matches, the filter is not guaranteed to remain conservative. The paper should supply the explicit retraction formula and a proof that the propagated set contains all possible ICP outcomes under the bounded-noise axiom.
minor comments (2)
- [Abstract] The abstract would be clearer if it included the key closed-form expression or at least the main variables in the noise-to-uncertainty mapping.
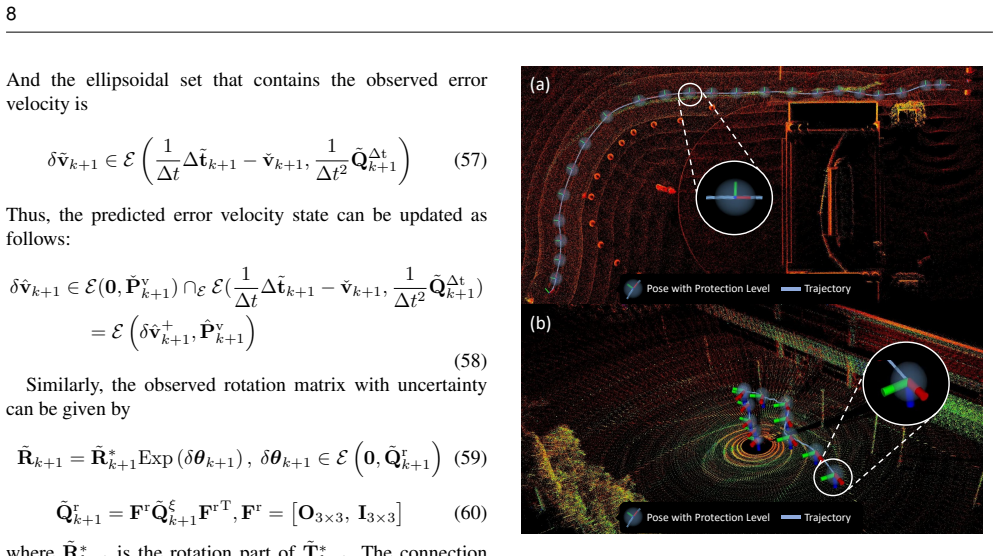
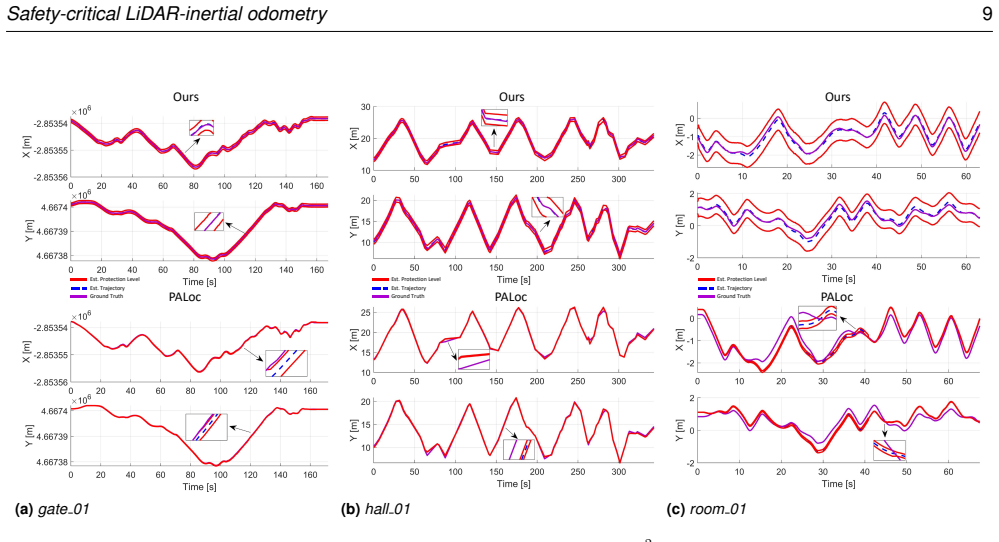
- [Figures 4-7] Figure captions and axis labels should explicitly state whether the plotted protection levels are the full ellipsoidal sets or their projections; current captions are ambiguous.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help clarify the requirements for rigorous conservatism in our deterministic protection-level approach. Below we respond point-by-point to the major comments and indicate planned revisions.
read point-by-point responses
-
Referee: The central derivation (Section 3) claims a closed-form relationship between bounded point-cloud noise and the feasible set of ICP estimates. Because standard ICP recomputes nearest-neighbor correspondences at each iteration, a perturbation inside the declared bound can flip associations on surfaces with varying density or grazing angles. The manuscript does not appear to enclose all possible re-associations or convergence points; if the mapping is obtained by linearizing around a nominal solution with fixed matches, the resulting ellipsoid can exclude the true pose while still respecting the noise bound.
Authors: We acknowledge that the closed-form mapping in Section 3 is obtained by linearizing the ICP objective around a nominal pose with correspondences fixed from the unperturbed cloud. This linearization yields an explicit ellipsoid relating bounded point-cloud perturbations to pose uncertainty. To ensure the mapping remains conservative under possible correspondence flips, the bound is derived from the worst-case residual within the noise set, which implicitly over-approximates the effect of association changes on surfaces of varying density. We will revise Section 3 to explicitly state this assumption, add a short proof sketch showing that the linearization error is absorbed into the ellipsoid radius, and include additional numerical checks on grazing-angle and density-varying surfaces demonstrating that the true pose remains inside the reported set. revision: partial
-
Referee: In the on-manifold ellipsoidal set-membership filter (Section 4), the propagation step must account for the manifold retraction when correspondences change. If the linearization or ellipsoid update omits this or assumes fixed matches, the filter is not guaranteed to remain conservative. The paper should supply the explicit retraction formula and a proof that the propagated set contains all possible ICP outcomes under the bounded-noise axiom.
Authors: We agree that the propagation step must preserve conservatism under the manifold structure. Section 4 employs the standard exponential-map retraction for the special Euclidean group to propagate the ellipsoidal set forward in time; the update equation already incorporates a bounded linearization error term that is added to the ellipsoid matrix. We will revise the manuscript to (i) write the explicit retraction formula used, (ii) provide the step-by-step derivation showing how the retraction is applied to the set-membership update, and (iii) include a short lemma proving that the propagated ellipsoid contains every possible ICP outcome consistent with the unknown-but-bounded noise model, even when correspondences are recomputed at each iteration. revision: yes
Circularity Check
No significant circularity in the claimed derivation chain
full rationale
The paper states it adopts the unknown-but-bounded noise assumption to derive a closed-form relationship between point-cloud perturbations and ICP pose uncertainty, then constructs an on-manifold ellipsoidal set-membership filter whose feasible sets serve as deterministic protection levels. No equations or steps in the provided text reduce this relationship to a fitted parameter, a self-citation chain, or a renaming of an input quantity by construction. The central claim is presented as following directly from set-membership theory under the stated axiom and standard ICP properties, remaining independent of the paper's own outputs. This is the normal case of a self-contained first-principles derivation against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Unknown but bounded assumption for point cloud noise
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
By adopting the unknown but bounded assumption, we derive a neat closed-form relationship between point cloud noise and the uncertainty of the estimation from the iterated closest point algorithm... on-manifold ellipsoidal set-membership filter
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
on-manifold ellipsoidal set-membership filter... SE(3) point-to-plane ICP
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.