Beyond MMSE: Enhancing PnP Restoration with ProxiMAP
Pith reviewed 2026-05-20 22:33 UTC · model grok-4.3
The pith
ProxiMAP improves PnP restoration by scheduling noise so residual matches the denoiser's training level, avoiding cartoon artifacts from direct MAP targeting.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ProxiMAP is an iterative MAP approximation whose noise schedule is chosen so the residual noise in the current iterate exactly matches the noise level on which the denoiser was trained. Because the denoiser therefore stays in-distribution, its score remains reliable, and the iteration automatically stops short of the cartoon-like fixed point that direct MAP targeting reaches.
What carries the argument
ProxiMAP noise schedule that matches iterate residual noise to the denoiser's training distribution
If this is right
- ProxiMAP serves as a drop-in replacement for MMSE denoisers inside existing PnP algorithms.
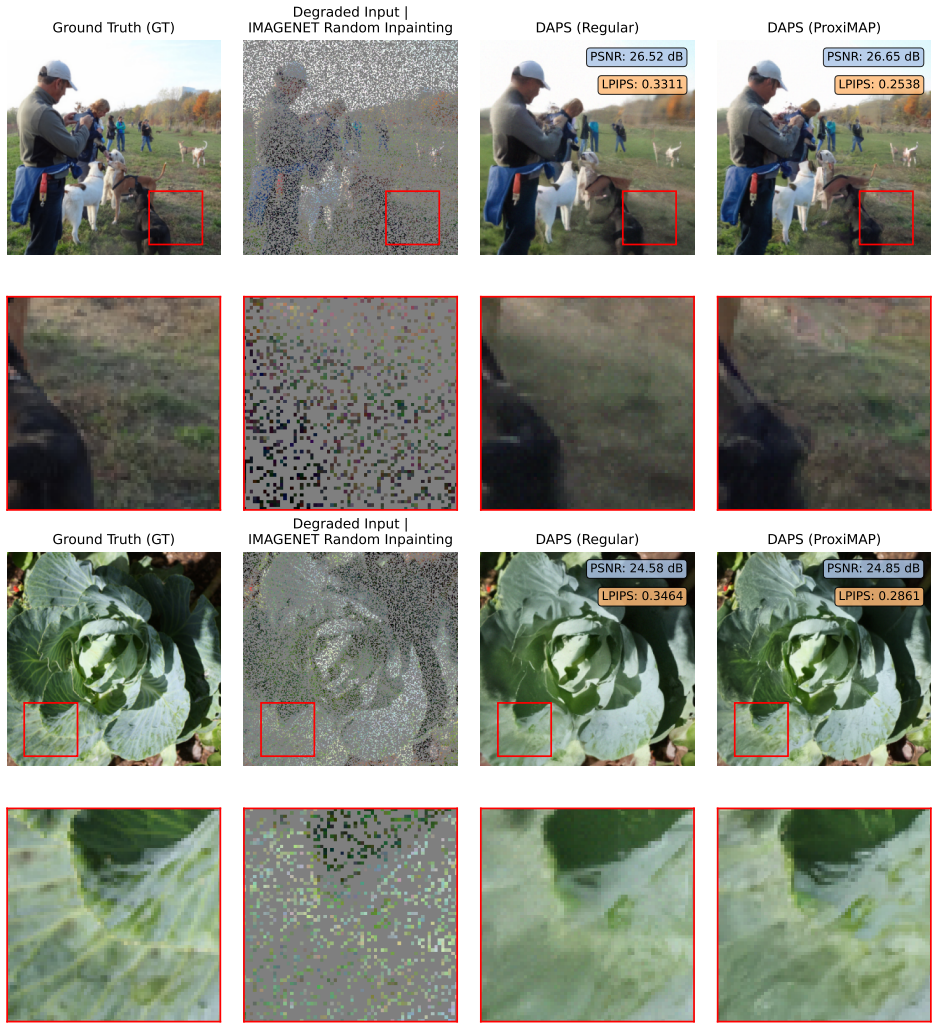
- The method yields sharper reconstructions on deblurring, inpainting, super-resolution and phase retrieval.
- A hybrid schedule that activates ProxiMAP only in late iterations matches or exceeds full replacement at reduced cost.
Where Pith is reading between the lines
- The same noise-matching principle could be tested in other score-based inverse-problem solvers that currently rely on early stopping heuristics.
- If the denoiser training distribution is known, the schedule can be derived without task-specific tuning, suggesting a parameter-light extension to new imaging modalities.
- The implicit early stopping may reduce the need for separate convergence diagnostics in deployed PnP pipelines.
Load-bearing premise
Matching residual noise to the training distribution is enough to keep the denoiser reliable and prevent cartoon-like convergence.
What would settle it
If ProxiMAP iterations still converge to visibly cartoon-like images when run to full convergence, or if they produce no consistent improvement over standard MMSE PnP on the reported tasks, the central claim is falsified.
Figures















read the original abstract
Plug-and-Play (PnP) methods have become standard tools for solving imaging inverse problems by replacing the intractable maximum a posteriori (MAP) denoiser with the MMSE one. While this mismatch has been widely treated as unavoidable, recent works have sought to close this gap by targeting the MAP with diffusion-model scores. We show this is problematic in practice: learned scores do not match the true ones, so MAP-targeting iterations converge to cartoon-like images rather than realistic ones, and better results are obtained by stopping short of convergence. We turn this observation into a design principle and introduce ProxiMAP, an iterative MAP approximation whose noise schedule keeps the iterate's residual noise matched to the denoiser's training noise. This keeps the denoiser in-distribution where its score is reliable, and yields implicit early stopping that avoids the failure mode above. ProxiMAP is a modular drop-in replacement for MMSE denoisers in standard PnP algorithms and consistently sharpens reconstructions across deblurring, inpainting, super-resolution, and phase retrieval. Building on the same principle, we propose a hybrid variant that applies ProxiMAP only in the late iterations of PnP, where the denoiser is most reliable -- matching or exceeding the full-replacement variant at a fraction of the cost.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes ProxiMAP as a modular drop-in replacement for MMSE denoisers in Plug-and-Play (PnP) algorithms for imaging inverse problems. It observes that direct MAP targeting with learned diffusion scores produces cartoon-like artifacts because the scores do not match the true posterior, and better results come from early stopping. ProxiMAP implements an iterative MAP approximation whose per-iteration noise schedule is chosen so that the residual noise in the current iterate matches the denoiser's training noise level; this is claimed to keep the denoiser in-distribution, yield reliable scores, and supply implicit early stopping. A hybrid variant applies the schedule only in late iterations. Improvements are reported on deblurring, inpainting, super-resolution, and phase retrieval.
Significance. If the central construction holds, the work supplies a practical design principle for noise scheduling that narrows the MMSE-MAP gap without requiring new training or heavy computation. The hybrid variant further improves efficiency while preserving gains. The explicit link between residual-noise matching and avoidance of the cartoon attractor is a concrete, testable contribution to the PnP and diffusion-based restoration literature.
major comments (2)
- The central claim (abstract and §3) that matching residual noise variance to the training distribution is sufficient to keep the denoiser reliably in-distribution rests on an assumption whose load-bearing status is not fully isolated. The skeptic analysis correctly notes that structured artifacts or correlations in the current estimate may still shift the effective input distribution even at matched noise level; the manuscript should supply an ablation that varies iterate structure while holding noise level fixed, or quantitative diagnostics (e.g., distribution-distance metrics between iterates and training patches) to rule out this alternative explanation.
- §4 (experimental section): the reported gains are described as consistent across four tasks, yet the strength of evidence for the noise-matching principle versus simple early-stopping is not quantified. A direct comparison of ProxiMAP against an MMSE baseline stopped at the same effective iteration count (or same residual norm) would clarify whether the schedule itself, rather than the implicit stopping, drives the improvement.
minor comments (2)
- Notation for the noise schedule parameter (e.g., how σ_t is chosen from the training schedule) should be made fully explicit in the algorithm box or pseudocode so that the method is immediately reproducible.
- Figure captions for the qualitative results could include the exact iteration at which each method is shown, to make the early-stopping effect visually verifiable.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The comments help clarify how to strengthen the isolation of the noise-matching principle and the comparison to early stopping. We address each major comment below and commit to revisions where appropriate.
read point-by-point responses
-
Referee: The central claim (abstract and §3) that matching residual noise variance to the training distribution is sufficient to keep the denoiser reliably in-distribution rests on an assumption whose load-bearing status is not fully isolated. The skeptic analysis correctly notes that structured artifacts or correlations in the current estimate may still shift the effective input distribution even at matched noise level; the manuscript should supply an ablation that varies iterate structure while holding noise level fixed, or quantitative diagnostics (e.g., distribution-distance metrics between iterates and training patches) to rule out this alternative explanation.
Authors: We agree that the current experiments do not fully isolate noise-level matching from possible distribution shifts induced by structured artifacts in the iterate. To address this, the revised manuscript will include a new ablation that holds the residual noise variance fixed while varying iterate structure (e.g., by injecting iterates from alternative PnP runs or different initializations). We will also report quantitative diagnostics such as patch-wise Wasserstein distance and FID between the effective input distribution at each step and the denoiser training distribution. These additions will directly test whether noise matching alone suffices to keep the denoiser in-distribution. revision: yes
-
Referee: §4 (experimental section): the reported gains are described as consistent across four tasks, yet the strength of evidence for the noise-matching principle versus simple early-stopping is not quantified. A direct comparison of ProxiMAP against an MMSE baseline stopped at the same effective iteration count (or same residual norm) would clarify whether the schedule itself, rather than the implicit stopping, drives the improvement.
Authors: We acknowledge that the present results do not yet quantify the incremental benefit of the ProxiMAP schedule over an MMSE baseline that is simply halted at a comparable iteration count or residual norm. In the revised version we will add this controlled comparison for all four tasks. The MMSE baseline will be terminated either after the same number of iterations used by ProxiMAP or when its residual norm matches the final residual norm observed under ProxiMAP; the resulting PSNR/SSIM and perceptual metrics will be reported side-by-side. This will make explicit whether the noise schedule contributes beyond implicit early stopping. revision: yes
Circularity Check
ProxiMAP derivation introduces an independent scheduling principle with no reduction to fitted inputs or self-citations
full rationale
The paper's central construction starts from the external empirical observation that direct MAP targeting with learned diffusion scores produces cartoon-like artifacts and that early stopping improves results. It then proposes a noise schedule that matches residual noise variance to the denoiser's training distribution as a design principle for keeping the denoiser in-distribution and providing implicit early stopping. This step does not reduce to any self-definitional equation, does not rename a fitted parameter as a prediction, and does not rely on load-bearing self-citations or uniqueness theorems from prior author work. The derivation remains self-contained against the stated observations and is validated empirically across restoration tasks rather than being forced by its own inputs.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ProxiMAP ... whose noise schedule keeps the iterate's residual noise matched to the denoiser's training noise. This keeps the denoiser in-distribution where its score is reliable
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
MAP-targeting iterations converge to cartoon-like images ... better results obtained by stopping short of convergence
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Diffusion Models as Cartoonists: The Curious Case of High Density Regions , author=
-
[2]
Score-Based Generative Modeling through Stochastic Differential Equations , author=
-
[3]
Neural ordinary differential equations , author=
-
[4]
Understanding hallucinations in diffusion models through mode interpolation , author=
-
[5]
On the Closed-Form of Flow Matching: Generalization Does Not Arise from Target Stochasticity , author=
-
[6]
A Good Score Does not Lead to A Good Generative Model , author=. 2024 , eprint=
work page 2024
-
[7]
Closed-Form Diffusion Models , author=
-
[8]
Pesme, Scott and Meanti, Giacomo and Arbel, Michael and Mairal, Julien , booktitle=NeurIPS, year=
-
[9]
Maximum Likelihood Training of Score-Based Diffusion Models , author=
-
[10]
Wu, Yuchen and Chen, Minshuo and Li, Zihao and Wang, Mengdi and Wei, Yuting , title =
-
[11]
The Perception-Distortion Tradeoff , author =
-
[12]
Denoising Diffusion Implicit Models , author=
-
[13]
Flow straight and fast: Learning to generate and transfer data with rectified flow , author=
-
[14]
Building Normalizing Flows with Stochastic Interpolants , booktitle = ICLR, author =
-
[15]
Inversion by Direct Iteration: An Alternative to Denoising Diffusion for Image Restoration , author=
-
[16]
A style-based generator architecture for generative adversarial networks , author=
-
[17]
Deng, Jia and Dong, Wei and Socher, Richard and Li, Li-Jia and Kai Li and Li Fei-Fei , booktitle=CVPR, title=
-
[18]
Choi, Jooyoung and Kim, Sungwon and Jeong, Yonghyun and Gwon, Youngjune and Yoon, Sungroh , booktitle = ICCV, title =
-
[19]
Alkhouri, Ismail and Linag, Shijun and Huang, Cheng-Han and Dai, Jimmy and Qu, Qing and Ravishankar, Saiprasad and Wang, Rongrong , title =
-
[20]
Denoising Diffusion Models for Plug-and-Play Image Restoration , author=
-
[21]
Diffusion Posterior Sampling for General Noisy Inverse Problems , author=
-
[22]
Improving Diffusion Inverse Problem Solving with Decoupled Noise Annealing , author=
-
[23]
A Variational Perspective on Solving Inverse Problems with Diffusion Models , author=
-
[24]
Olson, Miles and Santorella, Elizabeth and Tiao, Louis C. and Cakmak, Sait and Garrard, Mia and Daulton, Samuel and Lin, Zhiyuan Jerry and Ament, Sebastian and Beckerman, Bernard and Onofrey, Eric and Igusti, Paschal and Lara, Cristian and Letham, Benjamin and Cardoso, Cesar and Shen, Shiyun Sunny and Lin, Andy Chenyuan and Grange, Matthew and Kashtelyan,...
-
[25]
Venkatakrishnan, Singanallur V. and Bouman, Charles A. and Wohlberg, Brendt , booktitle=. Plug-and-Play priors for model based reconstruction , year=
-
[26]
SIAM Journal on Imaging Sciences , volume =
Romano, Yaniv and Elad, Michael and Milanfar, Peyman , title =. SIAM Journal on Imaging Sciences , volume =
-
[27]
Combettes, Patrick L. and Pesquet, Jean-Christophe. Proximal Splitting Methods in Signal Processing. Fixed-Point Algorithms for Inverse Problems in Science and Engineering. 2011
work page 2011
-
[28]
Foundations and Trends in optimization , volume=
Proximal algorithms , author=. Foundations and Trends in optimization , volume=
- [29]
-
[30]
Kamilov, Ulugbek S. and Bouman, Charles A. and Buzzard, Gregery T. and Wohlberg, Brendt , journal=. Plug-and-Play Methods for Integrating Physical and Learned Models in Computational Imaging: Theory, algorithms, and applications , year=
-
[31]
Ahmad, Rizwan and Bouman, Charles A. and Buzzard, Gregery T. and Chan, Stanley and Liu, Sizhuo and Reehorst, Edward T. and Schniter, Philip , journal=. Plug-and-Play Methods for Magnetic Resonance Imaging: Using Denoisers for Image Recovery , year=
-
[32]
Li, Xin and Ren, Yulin and Jin, Xin and Lan, Cuiling and Wang, Xingrui and Zeng, Wenjun and Wang, Xinchao and Chen, Zhibo , title =. 2025 , volume =
work page 2025
-
[33]
Convergent plug-and-play methods for image inverse problems with explicit and nonconvex deep regularization , author=. 2023 , school=
work page 2023
-
[34]
Dabov, Kostadin and Foi, Alessandro and Katkovnik, Vladimir and Egiazarian, Karen , journal=TIP, title=. 2007 , volume=
work page 2007
- [35]
-
[36]
IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=
Plug-and-play image restoration with deep denoiser prior , author=. IEEE Transactions on Pattern Analysis and Machine Intelligence , volume=. 2021 , publisher=
work page 2021
-
[37]
Zhang, Kai and Zuo, Wangmeng and Gu, Shuhang and Zhang, Lei , booktitle=CVPR, year=. Learning Deep
-
[38]
Diffusion Models as Plug-and-Play Priors , author=
-
[39]
Building Firmly Nonexpansive Convolutional Neural Networks , year=
Terris, Matthieu and Repetti, Audrey and Pesquet, Jean-Christophe and Wiaux, Yves , booktitle=. Building Firmly Nonexpansive Convolutional Neural Networks , year=
-
[40]
An analytic theory of creativity in convolutional diffusion models , author=
-
[41]
Nature Communications , volume=
Dynamical regimes of diffusion models , author=. Nature Communications , volume=. 2024 , publisher=
work page 2024
-
[42]
Prafulla Dhariwal and Alexander Quinn Nichol , booktitle=NeurIPS, year=. Diffusion Models Beat
-
[43]
What's in a Prior? Learned Proximal Networks for Inverse Problems , author=
-
[44]
Journal of Mathematical Imaging and Vision (JMIV) , volume=
On maximum a posteriori estimation with plug & play priors and stochastic gradient descent , author=. Journal of Mathematical Imaging and Vision (JMIV) , volume=. 2023 , publisher=
work page 2023
-
[45]
Robust Compressed Sensing MRI with Deep Generative Priors , year =
Jalal, Ajil and Arvinte, Marius and Daras, Giannis and Price, Eric and Dimakis, Alexandros G and Tamir, Jon , booktitle = NeurIPS, editor =. Robust Compressed Sensing MRI with Deep Generative Priors , year =
-
[46]
Tweedie Moment Projected Diffusions For Inverse Problems , author=
-
[47]
Practical and Asymptotically Exact Conditional Sampling in Diffusion Models , author=
- [48]
-
[49]
D-Flow: Differentiating through Flows for Controlled Generation , author =. 2024 , volume =
work page 2024
-
[50]
IEEE Transactions on Computational Imaging , volume=
Plug-and-play ADMM for image restoration: Fixed-point convergence and applications , author=. IEEE Transactions on Computational Imaging , volume=
-
[51]
Physica D: nonlinear phenomena , volume=
Nonlinear total variation based noise removal algorithms , author=. Physica D: nonlinear phenomena , volume=. 1992 , publisher=
work page 1992
- [52]
-
[53]
Sreehari, Suhas and Venkatakrishnan, S. V. and Wohlberg, Brendt and Buzzard, Gregery T. and Drummy, Lawrence F. and Simmons, Jeffrey P. and Bouman, Charles A. , journal=. Plug-and-Play Priors for Bright Field Electron Tomography and Sparse Interpolation , year=
-
[54]
Plug-and-play ISTA converges with kernel denoisers , author=
-
[55]
IEEE Transactions on Computational Imaging , volume=
Fixed-point and objective convergence of plug-and-play algorithms , author=. IEEE Transactions on Computational Imaging , volume=
-
[56]
Provable convergence of plug-and-play priors with MMSE denoisers , author=. 2020 , publisher=
work page 2020
-
[57]
Proximal denoiser for convergent plug-and-play optimization with nonconvex regularization , author=
-
[58]
T. Learning Proximal Operators: Using Denoising Networks for Regularizing Inverse Imaging Problems , year=
-
[59]
Plug-and-play image restoration with stochastic denoising regularization , author=
-
[60]
Solving linear inverse problems using the prior implicit in a denoiser , author=. arXiv preprint arXiv:2007.13640 , year=
-
[61]
Diffusion probabilistic models generalize when they fail to memorize , author=. International Conference on Machine Learning (ICML) 2023 workshop on structured probabilistic inference & generative modeling , year=
work page 2023
-
[62]
Levi Borodenko , url =
-
[63]
Tero Karras and Miika Aittala and Timo Aila and Samuli Laine , title =
-
[64]
2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) , year=
Inverse problems with diffusion models: A map estimation perspective , author=. 2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) , year=
work page 2025
-
[65]
Inverse Problems with Diffusion Models:
Gutha, Sai Bharath Chandra and Vinuesa, Ricardo and Azizpour, Hossein , booktitle=. Inverse Problems with Diffusion Models:
-
[66]
Zhang, Shaorong and Brekelmans, Rob and Ver Steeg, Greg , booktitle=. Local. 2025 , note=
work page 2025
-
[67]
On using the hypervolume indicator to compare
Cao, Yongtao and Smucker, Byran J and Robinson, Timothy J , journal=. On using the hypervolume indicator to compare
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.