Neural Network-Based Estimation of Time-Dependent Parameters in AR(p) Processes
Pith reviewed 2026-07-02 06:25 UTC · model grok-4.3
The pith
A neural network recovers time-dependent coefficients in autoregressive models to forecast nonstationary series under Gaussian or Laplace noise.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a relatively simple discrete-time dynamic model with time-varying coefficients, when its parameters are recovered inside a deep learning framework, serves as a mathematically tractable and practically flexible tool for forecasting complex dynamics under different noise assumptions, with the general model stated for TVAR(p) while prediction-interval formulas and numerical experiments are developed for the TVAR(1) case.
What carries the argument
A neural network that estimates the time-dependent coefficients of the TVAR(p) process directly from noisy observations.
If this is right
- The predictive scheme of the model can be formulated explicitly for both noise distributions.
- Prediction intervals can be constructed that quantify forecast uncertainty under Gaussian or Laplace noise.
- The same recovery procedure applies to the general TVAR(p) specification.
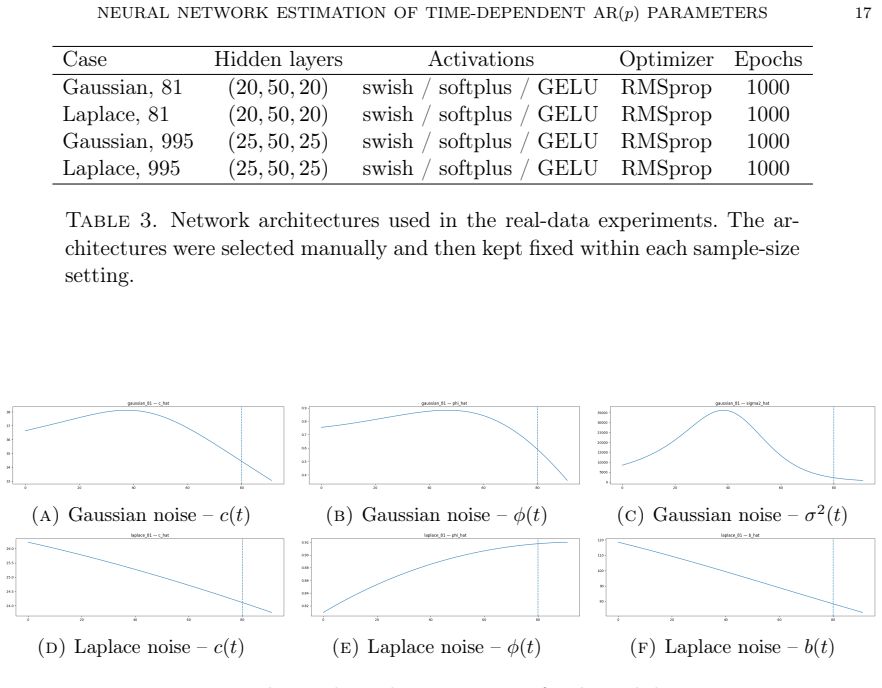
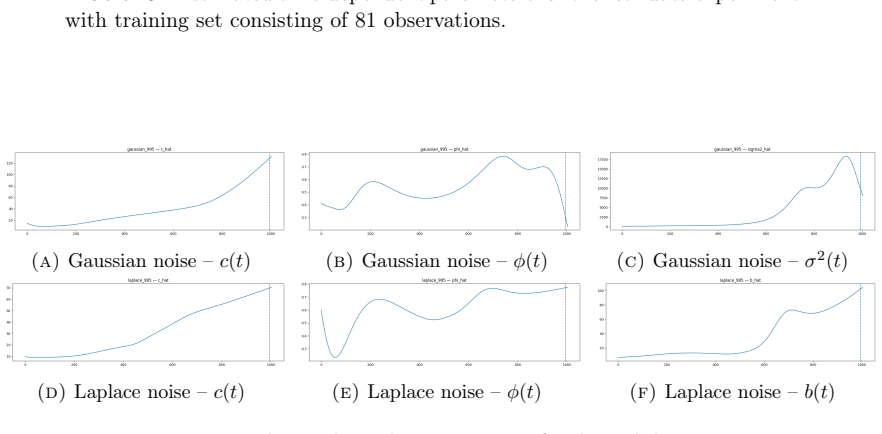
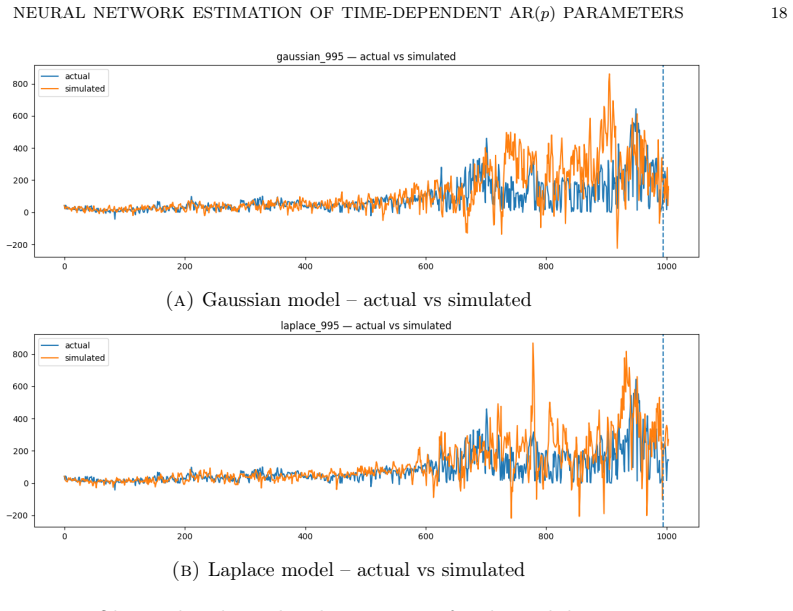
- Numerical experiments confirm that the estimated model produces forecasts for nonstationary series.
Where Pith is reading between the lines
- If parameter recovery succeeds on simulated data, the same neural-network step could be inserted into other linear parametric time-series models that require time-varying coefficients.
- The approach offers a route to handle heavy-tailed fluctuations in real series by swapping the noise assumption while retaining the same estimation architecture.
Load-bearing premise
A deep learning procedure can reliably recover the true time-varying parameters from finite noisy observations without the recovery step itself introducing uncontrolled bias or instability.
What would settle it
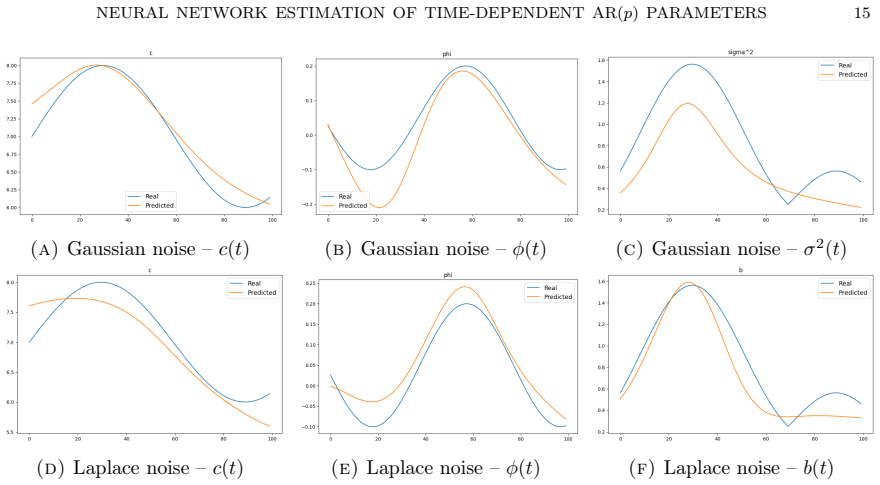
Generate synthetic observations from a known TVAR(1) process with prescribed time-varying coefficients and added noise, run the neural-network estimator, and verify whether the recovered coefficient trajectories match the prescribed ones within the expected statistical error.
Figures
read the original abstract
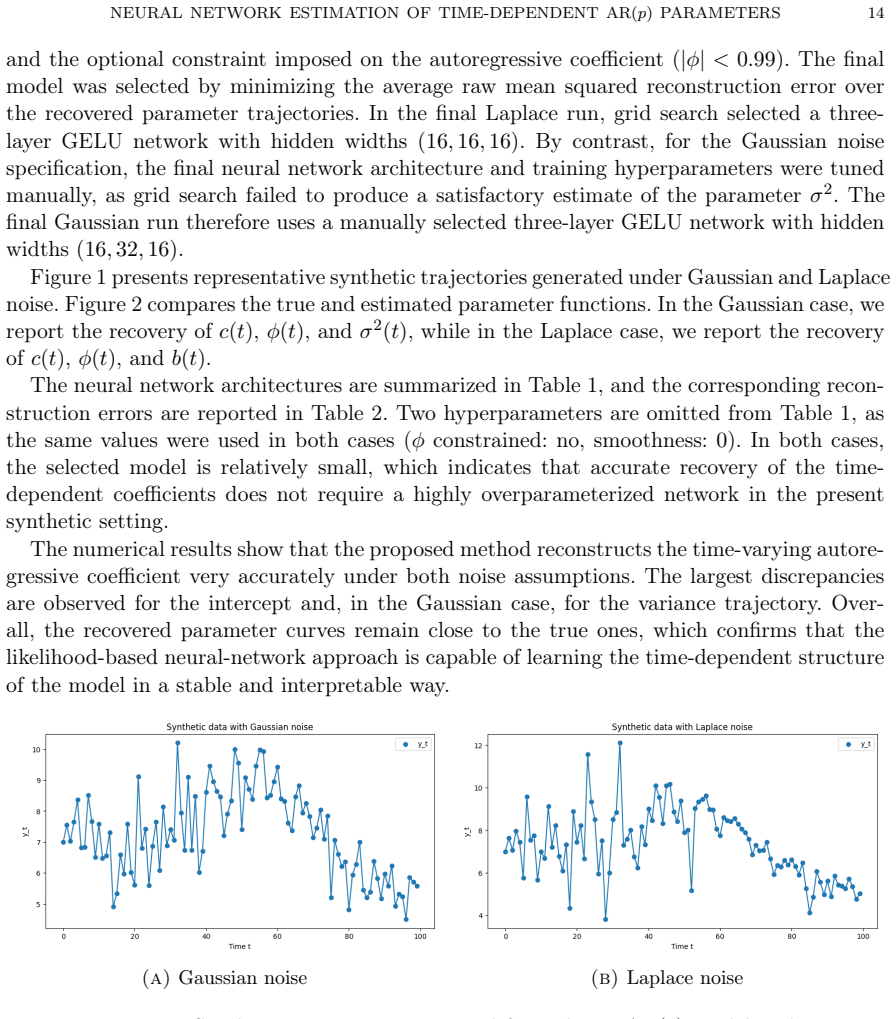
We investigate a forecasting framework based on a simple discrete-time dynamic model with coefficients varying in time. The parameters of the model are recovered within a deep learning framework, which makes it possible to retain a transparent parametric structure while simultaneously accounting for complex and nonstationary patterns in the observed phenomenon. Our analysis covers two specifications of the noise process. Besides the standard Gaussian setting, we also consider Laplace-distributed noise, which can offer a more adequate description in the presence of heavier tails and sharper local fluctuations. For both cases, we formulate the predictive scheme of the model and analyze the associated uncertainty quantification, including the construction of prediction intervals. The results illustrate that a relatively simple model, when combined with time-dependent parameter estimation, can serve as a mathematically tractable and practically flexible tool for forecasting complex dynamics under different noise assumptions. The general model is stated for TVAR($p$), while the prediction-interval formulas and the numerical experiments are developed for the TVAR(1) case.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a forecasting framework for time-varying autoregressive (TVAR(p)) processes in which the time-dependent coefficients are recovered via a neural network estimator. This retains a transparent parametric structure while accommodating nonstationarity. The work covers both Gaussian and Laplace noise, derives explicit predictive schemes and prediction-interval formulas for the TVAR(1) case, and supports the approach with numerical experiments illustrating its use for complex dynamics.
Significance. If the central empirical and derivation claims hold, the paper contributes a hybrid parametric-ML approach that is more interpretable than fully nonparametric forecasters yet more flexible than stationary AR models. The explicit prediction-interval formulas under two noise distributions and the retention of the TVAR structure are concrete strengths that could aid applications requiring both adaptability and uncertainty quantification.
major comments (2)
- [Prediction-interval formulas (TVAR(1) case)] Prediction-interval construction for TVAR(1): the formulas are derived under the assumption that the time-varying coefficients are known once estimated by the NN; it is unclear whether (or how) the intervals propagate uncertainty from the neural-network recovery step itself. This distinction is load-bearing for the uncertainty-quantification claim in the abstract and the TVAR(1) analysis.
- [Numerical experiments] Numerical experiments: while the manuscript reports experiments for the TVAR(1) case, the description does not supply quantitative metrics (e.g., parameter-recovery MSE on simulated data with known ground-truth trajectories) that would demonstrate the NN step does not dominate forecast error. This is required to substantiate the claim that the combined procedure yields usable forecasts.
minor comments (2)
- [Model formulation] The general TVAR(p) formulation is stated, yet all explicit formulas and experiments are restricted to p=1; a brief discussion of the obstacles to extending the prediction-interval derivation to p>1 would clarify the scope.
- [Estimation framework] Notation for the neural-network architecture and loss function used to recover the coefficient trajectories should be introduced with a dedicated equation or table to improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: [Prediction-interval formulas (TVAR(1) case)] Prediction-interval construction for TVAR(1): the formulas are derived under the assumption that the time-varying coefficients are known once estimated by the NN; it is unclear whether (or how) the intervals propagate uncertainty from the neural-network recovery step itself. This distinction is load-bearing for the uncertainty-quantification claim in the abstract and the TVAR(1) analysis.
Authors: The prediction intervals are derived conditionally on the neural-network estimates of the time-varying coefficients. This is a deliberate choice that preserves the parametric TVAR structure and keeps the derivation tractable; full propagation of NN estimation uncertainty would require a substantially different approach (e.g., Bayesian neural networks) that lies outside the paper's scope. We will revise the manuscript to state this conditional character explicitly in the abstract, the TVAR(1) section, and the uncertainty-quantification discussion. revision: yes
-
Referee: [Numerical experiments] Numerical experiments: while the manuscript reports experiments for the TVAR(1) case, the description does not supply quantitative metrics (e.g., parameter-recovery MSE on simulated data with known ground-truth trajectories) that would demonstrate the NN step does not dominate forecast error. This is required to substantiate the claim that the combined procedure yields usable forecasts.
Authors: We agree that quantitative metrics for the NN estimation step would strengthen the validation. In the revised version we will add parameter-recovery MSE (and related error measures) evaluated on simulated trajectories with known ground-truth coefficients, allowing direct assessment of whether the NN recovery error dominates the forecast performance. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The manuscript states the general TVAR(p) model, derives explicit prediction-interval formulas only for the TVAR(1) case under Gaussian and Laplace noise, and reports numerical experiments that apply the NN estimator to recover time-varying coefficients. None of these steps reduce by construction to fitted inputs, self-definitions, or self-citation chains; the NN recovery is presented as an empirical modeling choice rather than a claim whose validity is presupposed by the forecast formulas. The derivation therefore remains self-contained against external benchmarks and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
The Annals of Statistics , year =
Dahlhaus, Rainer , title =. The Annals of Statistics , year =
-
[2]
2012 , isbn =
Durbin, James and Koopman, Siem Jan , title =. 2012 , isbn =
2012
-
[3]
Deep Learning-Based Estimation of Time-Dependent Parameters in
Ka. Deep Learning-Based Estimation of Time-Dependent Parameters in. Applied Mathematics and Computation , year =
-
[4]
1996 , doi =
Kitagawa, Genshiro and Gersch, Will , title =. 1996 , doi =
1996
-
[5]
and Podg
Kotz, Samuel and Kozubowski, Tomasz J. and Podg. The Laplace Distribution and Generalizations: A Revisit with Applications to Communications, Economics, Engineering, and Finance , series =. 2001 , doi =
2001
-
[6]
International Journal of Forecasting , year =
Li, Xixi and Yuan, Jingsong , title =. International Journal of Forecasting , year =
-
[7]
2010 , doi =
Prado, Raquel and West, Mike , title =. 2010 , doi =
2010
-
[8]
International Journal of Forecasting , year =
Salinas, David and Flunkert, Valentin and Gasthaus, Jan and Januschowski, Tim , title =. International Journal of Forecasting , year =
-
[9]
and van der Wilk, Mark and Hafner, Danijar , title =
Tran, Dustin and Dusenberry, Michael W. and van der Wilk, Mark and Hafner, Danijar , title =. Advances in Neural Information Processing Systems 32 , year =
-
[10]
Electricity Price Forecasting: A Review of the State-of-the-Art with a Look into the Future , journal =
Weron, Rafa. Electricity Price Forecasting: A Review of the State-of-the-Art with a Look into the Future , journal =. 2014 , volume =
2014
-
[11]
Studies in Nonlinear Dynamics & Econometrics , year =
Nongni Donfack, Morvan and Dufays, Arnaud , title =. Studies in Nonlinear Dynamics & Econometrics , year =
-
[12]
Probabilistic Deep Learning: With Python, Keras and TensorFlow Probability , publisher =
D. Probabilistic Deep Learning: With Python, Keras and TensorFlow Probability , publisher =. 2020 , isbn =
2020
-
[13]
and Nelson, Paul I
Klimko, Lawrence A. and Nelson, Paul I. , title =. The Annals of Statistics , volume =. 1978 , doi =
1978
-
[14]
Peter , title =
Zhang, G. Peter , title =. Neurocomputing , volume =. 2003 , doi =
2003
discussion (0)
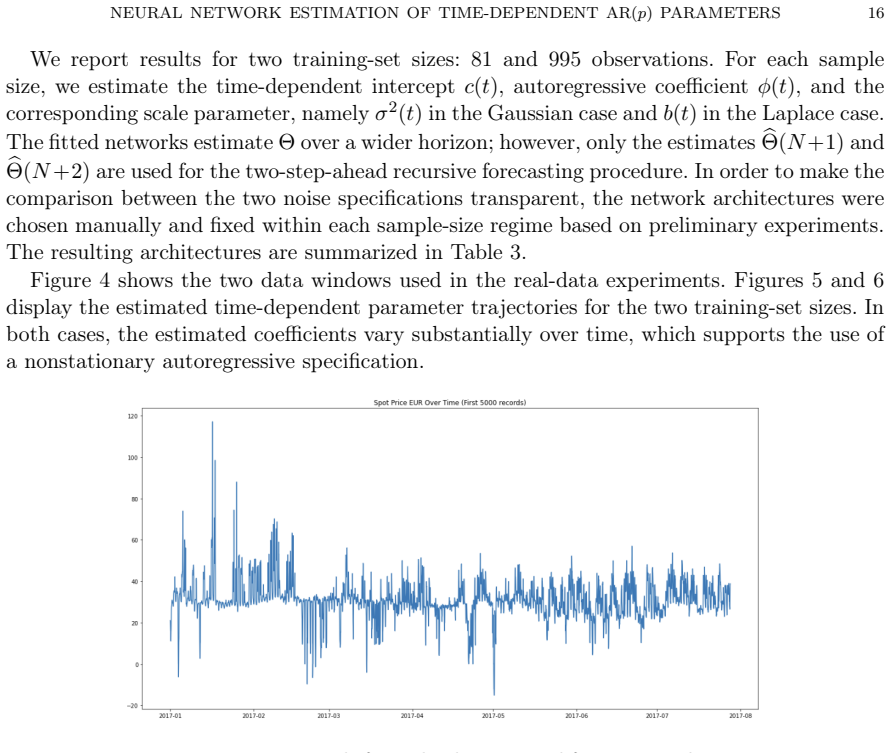
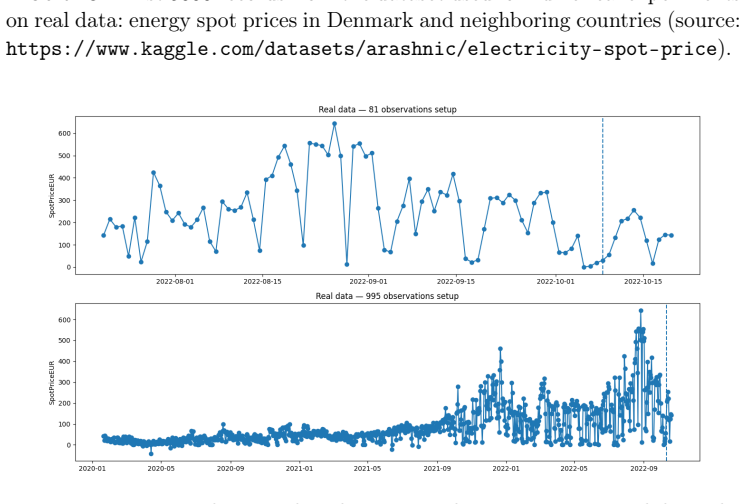
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.