Learning 1-Bit LiDAR-based Localization with Auxiliary Objective
Pith reviewed 2026-06-29 04:40 UTC · model grok-4.3
The pith
An auxiliary objective lets binary neural networks achieve accurate 6-DoF LiDAR localization.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
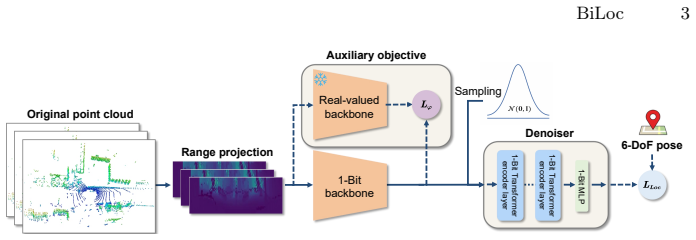
BiLoc establishes the first binary neural network framework for 6-DoF LiDAR localization by introducing an auxiliary objective that adaptively regulates information retention in the binary encoder according to the information-bottleneck principle, thereby mitigating the performance drop from binarization.
What carries the argument
The auxiliary objective, which provides additional optimization signals to compensate for the limited representational capacity and gradient mismatch in BNNs.
If this is right
- Localization can run with a much smaller portion of on-board compute resources.
- Binary networks become competitive with full-precision methods for outdoor pose estimation.
- Information loss from binarization can be mitigated without changing the network architecture.
- Autonomous systems can maintain continuous localization without heavy hardware.
Where Pith is reading between the lines
- Similar auxiliary objectives could improve binary networks in other vision tasks like detection or segmentation.
- The information-bottleneck reinterpretation might guide binarization in other sensor modalities.
- Deploying such models could enable localization on low-power embedded devices for robotics.
Load-bearing premise
The auxiliary objective can effectively compensate for the information loss and optimization challenges caused by binarizing the network for this localization task.
What would settle it
If experiments without the auxiliary objective show only minor or no improvement over standard BNN training on the same datasets, the claim that it mitigates the loss would not hold.
Figures

read the original abstract
6-DoF LiDAR-based localization is a fundamental capability for autonomous systems operating in large-scale outdoor environments. Many deep-learning-based localization methods have achieved promising performance so far. However, as one of the always-on modules competing for limited on-board computational resources, the localization module is expected to consume only a small portion of the overall compute budget. Most existing learning-based methods are still too heavy for this purpose. In contrast, binary neural networks (BNNs) offer an appealing solution, but the 1-bit compression causes severe information loss and performance drop. In this paper, we address this challenge by proposing Binarized LiDAR-based Localization (BiLoc), the first binary neural network framework for 6-DoF LiDAR localization. Specifically, we reinterpret the training of BNNs from the perspective of the information-bottleneck principle, aiming at retaining minimal yet sufficient representations for pose estimation while suppressing redundant variations. And we introduce an auxiliary objective that adaptively regulates information retention in the binary encoder, effectively mitigating the information loss caused by binarization. This auxiliary objective provides additional optimization signals that compensate for the limited representational capacity and the gradient mismatch inherent in BNNs. Extensive experiments on large-scale outdoor LiDAR datasets demonstrate that BiLoc establishes a new state of the art for LiDAR localization with BNNs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes BiLoc, the first binary neural network (BNN) framework for 6-DoF LiDAR-based localization. It reinterprets BNN training through the information-bottleneck principle to retain minimal yet sufficient representations for pose estimation, and introduces an auxiliary objective that adaptively regulates information retention in the binary encoder. This objective is claimed to supply additional optimization signals that compensate for limited representational capacity and gradient mismatch in BNNs, thereby mitigating binarization-induced information loss. The paper asserts that extensive experiments on large-scale outdoor LiDAR datasets establish a new state of the art for LiDAR localization with BNNs.
Significance. If the experimental claims hold with rigorous validation, the work would be significant for enabling low-compute, always-on localization in autonomous systems. The information-bottleneck reinterpretation and auxiliary objective represent a targeted attempt to address known BNN limitations in a robotics context, with potential for broader application to other 1-bit perception tasks.
major comments (3)
- [Abstract] Abstract: The central claim that 'extensive experiments demonstrate that BiLoc establishes a new state of the art' is unsupported by any reported metrics, baselines, error bars, dataset details, or ablation results, rendering the effectiveness of the auxiliary objective unevaluable.
- [Abstract] Abstract, paragraph on the auxiliary objective: No loss formulation, weighting hyperparameter schedule, or derivation is provided showing how the auxiliary objective alters gradient flow through the binarization operator or compensates for the straight-through estimator mismatch; this is load-bearing for the claim that it mitigates information loss.
- [Abstract] Abstract: The assertion that the auxiliary objective 'provides additional optimization signals that compensate for the limited representational capacity and the gradient mismatch inherent in BNNs' lacks any supporting analysis of training dynamics or gradient statistics, which is required to substantiate the information-bottleneck reinterpretation.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback focused on the abstract. We will revise the abstract to include key quantitative results supporting the SOTA claim. Detailed formulations, derivations, and analyses are already present in the main text and will not be duplicated in the abstract due to length constraints.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'extensive experiments demonstrate that BiLoc establishes a new state of the art' is unsupported by any reported metrics, baselines, error bars, dataset details, or ablation results, rendering the effectiveness of the auxiliary objective unevaluable.
Authors: The abstract is a concise summary and omits specific numbers for brevity. The full manuscript (Sections 4 and 5) reports all requested details: metrics with error bars, baselines, dataset specifications, and ablations isolating the auxiliary objective. We will revise the abstract to incorporate 1-2 key quantitative results (e.g., translation/rotation errors on the primary datasets) to make the SOTA claim self-contained. revision: yes
-
Referee: [Abstract] Abstract, paragraph on the auxiliary objective: No loss formulation, weighting hyperparameter schedule, or derivation is provided showing how the auxiliary objective alters gradient flow through the binarization operator or compensates for the straight-through estimator mismatch; this is load-bearing for the claim that it mitigates information loss.
Authors: The abstract intentionally remains at a conceptual level. The explicit loss formulation, adaptive weighting schedule, and derivation linking the auxiliary term to gradient flow through the binarization operator (including compensation for straight-through estimator mismatch) appear in Section 3.2, grounded in the information-bottleneck reinterpretation. Standard practice places such technical detail in the body rather than the abstract. revision: no
-
Referee: [Abstract] Abstract: The assertion that the auxiliary objective 'provides additional optimization signals that compensate for the limited representational capacity and the gradient mismatch inherent in BNNs' lacks any supporting analysis of training dynamics or gradient statistics, which is required to substantiate the information-bottleneck reinterpretation.
Authors: The supporting analysis of training dynamics, gradient statistics, and information retention is contained in the experimental results and appendix of the full manuscript. The abstract states the high-level claim on the basis of those analyses; we do not believe the abstract itself must reproduce the gradient histograms or dynamics plots. revision: no
Circularity Check
No circularity: empirical auxiliary objective with no self-referential derivation chain
full rationale
The paper presents BiLoc as an empirical framework that adds an auxiliary training objective to standard BNN training for LiDAR pose estimation. The abstract describes reinterpreting BNN training via the information-bottleneck principle and introducing an auxiliary loss to regulate information retention, but supplies no equations, loss formulations, or derivation steps that reduce the claimed performance gain to a fitted parameter, self-citation, or input by construction. No uniqueness theorems, ansatzes smuggled via prior self-work, or renamed empirical patterns are invoked in the provided text. The approach is framed as a practical training modification whose validity rests on experimental results rather than a closed mathematical loop. This is the normal case of a non-circular empirical contribution.
Axiom & Free-Parameter Ledger
free parameters (1)
- auxiliary objective weighting hyperparameter
axioms (1)
- domain assumption The information-bottleneck principle can be directly reinterpreted as a training objective for binary networks in pose estimation
Reference graph
Works this paper leans on
-
[1]
In: IEEE in- ternational conference on robotics and automation
Barnes, D., Gadd, M., Murcutt, P., Newman, P., Posner, I.: The oxford radar robotcar dataset: A radar extension to the oxford robotcar dataset. In: IEEE in- ternational conference on robotics and automation. pp. 6433–6438. IEEE (2020)
2020
-
[2]
In: International Conference on Machine Learning
Belilovsky, E., Eickenberg, M., Oyallon, E.: Decoupled greedy learning of cnns. In: International Conference on Machine Learning. pp. 736–745. PMLR (2020)
2020
-
[3]
Estimating or Propagating Gradients Through Stochastic Neurons for Conditional Computation
Bengio, Y., Léonard, N., Courville, A.C.: Estimating or propagating gradients through stochastic neurons for conditional computation. ArXivabs/1308.3432 (2013)
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[4]
Berger, T.: Rate Distortion Theory and Data Compression, pp. 1–39. Springer Vienna, Vienna (1975)
1975
-
[5]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Brachmann, E., Cavallari, T., Prisacariu, V.A.: Accelerated coordinate encoding: Learning to relocalize in minutes using rgb and poses. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 5044– 5053 (2023)
2023
-
[6]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Brachmann, E., Krull, A., Nowozin, S., Shotton, J., Michel, F., Gumhold, S., Rother, C.: Dsac-differentiable ransac for camera localization. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 6684–6692 (2017)
2017
-
[7]
The International Journal of Robotics Research35(9), 1023–1035 (2016)
Carlevaris-Bianco, N., Ushani, A.K., Eustice, R.M.: University of michigan north campus long-term vision and lidar dataset. The International Journal of Robotics Research35(9), 1023–1035 (2016)
2016
-
[8]
In: Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition
Chen, L., Wang, D., Gan, Z., Liu, J., Henao, R., Carin, L.: Wasserstein contrastive representation distillation. In: Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition. pp. 16296–16305 (2021)
2021
-
[9]
In: Proceedings of the European Conference on Computer Vision (2022)
Chen, S., Li, X., Wang, Z., Prisacariu, V.: Dfnet: Enhance absolute pose regres- sion with direct feature matching. In: Proceedings of the European Conference on Computer Vision (2022)
2022
-
[10]
Advances in Neural Information Processing Systems37, 30651–30669 (2024)
Chen, Z., Qin, H., Guo, Y., Su, X., Yuan, X., Kong, L., Zhang, Y.: Binarized diffu- sion model for image super-resolution. Advances in Neural Information Processing Systems37, 30651–30669 (2024)
2024
-
[11]
IEEE transac- tions on pattern analysis and machine intelligence45(10), 12358–12376 (2023)
Chen, Z., Sun, K., Yang, F., Guo, L., Tao, W.: Sc2-pcr++: Rethinking the gener- ation and selection for efficient and robust point cloud registration. IEEE transac- tions on pattern analysis and machine intelligence45(10), 12358–12376 (2023)
2023
-
[12]
In: Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition
Cheng, X., Rao, Z., Chen, Y., Zhang, Q.: Explaining knowledge distillation by quantifying the knowledge. In: Proceedings of the IEEE/CVF conference on com- puter vision and pattern recognition. pp. 12925–12935 (2020)
2020
-
[13]
cuDNN: Efficient Primitives for Deep Learning
Chetlur, S., Woolley, C., Vandermersch, P., Cohen, J., Tran, J., Catanzaro, B., Shelhamer, E.: cudnn: Efficient primitives for deep learning. arXiv preprint arXiv:1410.0759 (2014)
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[14]
In: Proceed- ings of the IEEE/CVF international conference on computer vision
Cho, J.H., Hariharan, B.: On the efficacy of knowledge distillation. In: Proceed- ings of the IEEE/CVF international conference on computer vision. pp. 4794–4802 (2019) 16 Yin et al
2019
-
[15]
Ad- vances in neural information processing systems26(2013)
Cuturi, M.: Sinkhorn distances: Lightspeed computation of optimal transport. Ad- vances in neural information processing systems26(2013)
2013
-
[16]
In: International Confer- ence on Machine Learning
Deng, S., Lin, H., Li, Y., Gu, S.: Surrogate module learning: Reduce the gradient error accumulation in training spiking neural networks. In: International Confer- ence on Machine Learning. pp. 7645–7657. PMLR (2023)
2023
-
[17]
In: International Conference on Learning Representations (2021)
Dosovitskiy, A.: An image is worth 16x16 words: Transformers for image recogni- tion at scale. In: International Conference on Learning Representations (2021)
2021
-
[18]
IEEE Computational Intelligence Magazine17(4), 39–51 (2022)
Duan, S., Principe, J.C.: Training deep architectures without end-to-end back- propagation: A survey on the provably optimal methods. IEEE Computational Intelligence Magazine17(4), 39–51 (2022)
2022
-
[19]
Fischler, M.A., Bolles, R.C.: Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM24, 381–395 (1981)
1981
-
[20]
In: IEEE International Conference on Robotics and Automa- tion
Frickenstein, A., Vemparala, M.R., Mayr, J., Nagaraja, N.S., Unger, C., Tombari, F., Stechele, W.: Binary dad-net: Binarized driveable area detection network for autonomous driving. In: IEEE International Conference on Robotics and Automa- tion. pp. 2295–2301 (2020)
2020
-
[21]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Gao, T., Zhang, Y., Zhang, Z., Liu, H., Yin, K., Xu, C., Kong, H.: Bhvit: Bina- rized hybrid vision transformer. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 3563–3572 (2025)
2025
-
[22]
Gibson, J.D.: Rate Distortion Theory, pp. 77–92. Springer Nature Switzerland, Cham (2025)
2025
-
[23]
IEEE Robotics and Automation Letters9(6), 5070–5077 (2024)
Grainge, O., Milford, M., Bodala, I., Ramchurn, S.D., Ehsan, S.: Design space exploration of low-bit quantized neural networks for visual place recognition. IEEE Robotics and Automation Letters9(6), 5070–5077 (2024)
2024
-
[24]
IEEE Robotics and Automation Letters (2024)
Grainge, O., Milford, M., Bodala, I., Ramchurn, S.D., Ehsan, S.: Structured prun- ing for efficient visual place recognition. IEEE Robotics and Automation Letters (2024)
2024
-
[25]
He, Y., Lou, Z., Zhang, L., Liu, J., Wu, W., Zhou, H., Zhuang, B.: Bivit: Extremely compressedbinaryvisiontransformers.In:IEEE/CVFInternationalConferenceon Computer Vision. pp. 5651–5663 (2023)
2023
-
[26]
In: Proceedings of the IEEE international conference on computer vision
He, Y., Zhang, X., Sun, J.: Channel pruning for accelerating very deep neural networks. In: Proceedings of the IEEE international conference on computer vision. pp. 1389–1397 (2017)
2017
-
[27]
Distilling the Knowledge in a Neural Network
Hinton, G., Vinyals, O., Dean, J.: Distilling the knowledge in a neural network. arXiv preprint arXiv:1503.02531 (2015)
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[28]
Advances in neural information processing systems29(2016)
Hubara,I.,Courbariaux,M.,Soudry,D.,El-Yaniv,R.,Bengio,Y.:Binarizedneural networks. Advances in neural information processing systems29(2016)
2016
-
[29]
In: Proceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition
Jacob, B., Kligys, S., Chen, B., Zhu, M., Tang, M., Howard, A., Adam, H., Kalenichenko,D.:Quantizationandtrainingofneuralnetworksforefficientinteger- arithmetic-only inference. In: Proceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition. pp. 2704–2713 (2018)
2018
-
[30]
In: Proceedings of the IEEE conference on computer vision and pattern recognition
Kendall, A., Cipolla, R.: Geometric loss functions for camera pose regression with deep learning. In: Proceedings of the IEEE conference on computer vision and pattern recognition. pp. 5974–5983 (2017)
2017
-
[31]
In: Proceedings of the IEEE international con- ference on computer vision
Kendall, A., Grimes, M., Cipolla, R.: Posenet: A convolutional network for real- time 6-dof camera relocalization. In: Proceedings of the IEEE international con- ference on computer vision. pp. 2938–2946 (2015)
2015
-
[32]
In: Proceedings of the IEEE/CVF winter conference on applications of computer vi- sion
Komorowski, J.: Minkloc3d: Point cloud based large-scale place recognition. In: Proceedings of the IEEE/CVF winter conference on applications of computer vi- sion. pp. 1790–1799 (2021) BiLoc 17
2021
-
[33]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops
Le, P.H.C., Li, X.: Binaryvit: Pushing binary vision transformers towards convolu- tional models. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops. pp. 4665–4674 (June 2023)
2023
-
[34]
IEEE Transactions on Parallel and Distributed Systems32(7), 1878–1891 (2020)
Li, A., Su, S.: Accelerating binarized neural networks via bit-tensor-cores in turing gpus. IEEE Transactions on Parallel and Distributed Systems32(7), 1878–1891 (2020)
2020
-
[35]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Li, W., Liu, C., Yu, S., Liu, D., Zhou, Y., Shen, S., Wen, C., Wang, C.: Light- loc: Learning outdoor lidar localization at light speed. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 6680– 6689 (2025)
2025
-
[36]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Li, W., Yang, Y., Yu, S., Hu, G., Wen, C., Cheng, M., Wang, C.: Diffloc: Diffusion model for outdoor lidar localization. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 15045–15054 (2024)
2024
-
[37]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Li,W.,Yu,S.,Wang,C.,Hu,G.,Shen,S.,Wen,C.:Sgloc:Scenegeometryencoding for outdoor lidar localization. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 9286–9295 (2023)
2023
-
[38]
In: AAAI Conference on Artificial Intelligence
Li, Y., Xu, S., Lin, M., Cao, X., Liu, C., Sun, X., Zhang, B.: Bi-vit: Pushing the limit of vision transformer quantization. In: AAAI Conference on Artificial Intelligence. vol. 38, pp. 3243–3251 (2024)
2024
-
[39]
In: International conference on machine learning
Liu, S.Y., Liu, Z., Cheng, K.T.: Oscillation-free quantization for low-bit vision transformers. In: International conference on machine learning. pp. 21813–21824. PMLR (2023)
2023
-
[40]
In: European conference on computer vision
Liu, Z., Shen, Z., Savvides, M., Cheng, K.T.: Reactnet: Towards precise binary neural network with generalized activation functions. In: European conference on computer vision. pp. 143–159. Springer (2020)
2020
-
[41]
In: Proceedings of the European conference on com- puter vision
Liu, Z., Wu, B., Luo, W., Yang, X., Liu, W., Cheng, K.T.: Bi-real net: Enhanc- ing the performance of 1-bit cnns with improved representational capability and advanced training algorithm. In: Proceedings of the European conference on com- puter vision. pp. 722–737 (2018)
2018
-
[42]
IEEE Transactions on Robotics (2025)
Luo, L., Cao, S.Y., Li, X., Xu, J., Ai, R., Yu, Z., Chen, X.: Bevplace++: Fast, robust, and lightweight lidar global localization for unmanned ground vehicles. IEEE Transactions on Robotics (2025)
2025
-
[43]
In: Conference on Robot Learning
Moreau, A., Piasco, N., Tsishkou, D., Stanciulescu, B., de La Fortelle, A.: Lens: Localization enhanced by nerf synthesis. In: Conference on Robot Learning. pp. 1347–1356. PMLR (2022)
2022
-
[44]
DINOv2: Learning Robust Visual Features without Supervision
Oquab, M., Darcet, T., Moutakanni, T., Vo, H., Szafraniec, M., Khalidov, V., Fernandez, P., Haziza, D., Massa, F., El-Nouby, A., et al.: Dinov2: Learning robust visual features without supervision. arXiv preprint arXiv:2304.07193 (2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[45]
In: Proceed- ings of the IEEE/CVF conference on computer vision and pattern recognition
Qin, H., Gong, R., Liu, X., Shen, M., Wei, Z., Yu, F., Song, J.: Forward and backward information retention for accurate binary neural networks. In: Proceed- ings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 2250–2259 (2020)
2020
-
[46]
In: European conference on computer vision
Rastegari, M., Ordonez, V., Redmon, J., Farhadi, A.: Xnor-net: Imagenet classi- fication using binary convolutional neural networks. In: European conference on computer vision. pp. 525–542. Springer (2016)
2016
-
[47]
In: Proceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., Chen, L.C.: Mobilenetv2: In- verted residuals and linear bottlenecks. In: Proceedings of the IEEE/CVF Confer- ence on Computer Vision and Pattern Recognition. pp. 4510–4520 (2018)
2018
-
[48]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Sarlin, P.E., DeTone, D., Malisiewicz, T., Rabinovich, A.: Superglue: Learning feature matching with graph neural networks. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 4938–4947 (2020) 18 Yin et al
2020
-
[49]
IEEE transactions on pattern analysis and machine intelligence 45(12), 14222–14233 (2023)
Shavit, Y., Ferens, R., Keller, Y.: Coarse-to-fine multi-scene pose regression with transformers. IEEE transactions on pattern analysis and machine intelligence 45(12), 14222–14233 (2023)
2023
-
[50]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Shen, Z., Liu, Z., Qin, J., Huang, L., Cheng, K.T., Savvides, M.: S2-bnn: Bridging the gap between self-supervised real and 1-bit neural networks via guided distribu- tion calibration. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 2165–2174 (2021)
2021
-
[51]
ISPRS journal of photogrammetry and remote sensing184, 177–188 (2022)
Shi, C., Li, J., Gong, J., Yang, B., Zhang, G.: An improved lightweight deep neural network with knowledge distillation for local feature extraction and visual localiza- tion using images and lidar point clouds. ISPRS journal of photogrammetry and remote sensing184, 177–188 (2022)
2022
-
[52]
Opening the Black Box of Deep Neural Networks via Information
Shwartz-Ziv, R., Tishby, N.: Opening the black box of deep neural networks via information. arXiv preprint arXiv:1703.00810 (2017)
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[53]
In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Patnaik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine, B., et al.: Scalability in perception for autonomous driving: Waymo open dataset. In: Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. pp. 2446–2454 (2020)
2020
-
[54]
In: Proceedings of the IEEE conference on computer vision and pattern recognition
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich, A.: Going deeper with convolutions. In: Proceedings of the IEEE conference on computer vision and pattern recognition. pp. 1–9 (2015)
2015
-
[55]
The information bottleneck method
Tishby, N., Pereira, F.C., Bialek, W.: The information bottleneck method. arXiv preprint physics/0004057 (2000)
work page internal anchor Pith review Pith/arXiv arXiv 2000
-
[56]
In: IEEE Information Theory Workshop
Tishby, N., Zaslavsky, N.: Deep learning and the information bottleneck principle. In: IEEE Information Theory Workshop. pp. 1–5 (2015)
2015
-
[57]
In: International conference on machine learning
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles, A., Jégou, H.: Training data-efficient image transformers & distillation through attention. In: International conference on machine learning. pp. 10347–10357. PMLR (2021)
2021
-
[58]
In: Proceedings of the IEEE conference on computer vision and pattern recognition
Uy, M.A., Lee, G.H.: Pointnetvlad: Deep point cloud based retrieval for large-scale place recognition. In: Proceedings of the IEEE conference on computer vision and pattern recognition. pp. 4470–4479 (2018)
2018
-
[59]
Victor, T., Kusano, K., Gode, T., Chen, R., Schwall, M.: Safety performance of the waymo rider-only automated driving system at one million miles. Tech. Rep. (2023)
2023
-
[60]
Villani, C., et al.: Optimal transport: old and new, vol. 338. Springer (2008)
2008
-
[61]
In: Proceedings of the AAAI Conference on Artificial Intelligence
Wang, B., Chen, C., Lu, C.X., Zhao, P., Trigoni, N., Markham, A.: Atloc: Attention guided camera localization. In: Proceedings of the AAAI Conference on Artificial Intelligence. pp. 10393–10401 (2020)
2020
-
[62]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Wang, J., Rupprecht, C., Novotny, D.: Posediffusion: Solving pose estimation via diffusion-aided bundle adjustment. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 9773–9783 (2023)
2023
-
[63]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Wang, S., Kang, Q., She, R., Wang, W., Zhao, K., Song, Y., Tay, W.P.: Hypliloc: Towards effective lidar pose regression with hyperbolic fusion. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 5176–5185 (2023)
2023
-
[64]
IEEE Sensors Journal22(1), 959–968 (2021)
Wang, W., Wang, B., Zhao, P., Chen, C., Clark, R., Yang, B., Markham, A., Trigoni, N.: Pointloc: Deep pose regressor for lidar point cloud localization. IEEE Sensors Journal22(1), 959–968 (2021)
2021
-
[65]
In: Proceedings of the IEEE/CVF international conference on computer vision
Wang, Y., Solomon, J.M.: Deep closest point: Learning representations for point cloud registration. In: Proceedings of the IEEE/CVF international conference on computer vision. pp. 3523–3532 (2019) BiLoc 19
2019
-
[66]
International Journal of Computer Vision133(5), 2752–2782 (2025)
Wang, Y., Ni, Z., Pu, Y., Zhou, C., Ying, J., Song, S., Huang, G.: Infopro: Locally supervised deep learning by maximizing information propagation. International Journal of Computer Vision133(5), 2752–2782 (2025)
2025
-
[67]
Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition pp
Wang, Z., Wu, Z., Lu, J., Zhou, J.: Bidet: An efficient binarized object detector. Proceedings of the IEEE/CVF conference on computer vision and pattern recog- nition pp. 2046–2055 (2020)
2046
-
[68]
In: 2015 IEEE international conference on robotics and automation (ICRA)
Wolcott,R.W.,Eustice,R.M.:Fastlidarlocalizationusingmultiresolutiongaussian mixture maps. In: 2015 IEEE international conference on robotics and automation (ICRA). pp. 2814–2821. IEEE (2015)
2015
-
[69]
In: European Conference on Computer Vision
Xu, S., Li, Y., Zeng, B., Ma, T., Zhang, B., Cao, X., Gao, P., Lü, J.: Ida-det: An information discrepancy-aware distillation for 1-bit detectors. In: European Conference on Computer Vision. pp. 346–361. Springer (2022)
2022
-
[70]
In: Forty-first International Conference on Machine Learning (2024)
Xu, S., Wang, M., Li, Y., Lin, M., Zhang, B., Doermann, D., Sun, X.: Learning 1-bit tiny object detector with discriminative feature refinement. In: Forty-first International Conference on Machine Learning (2024)
2024
-
[71]
In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition
Yang, B., Li, Z., Li, W., Cai, Z., Wen, C., Zang, Y., Muller, M., Wang, C.: Lisa: Lidar localization with semantic awareness. In: Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. pp. 15271–15280 (2024)
2024
-
[72]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Yang, Y., Li, W., Ao, S., Xu, Q., Yu, S., Guo, Y., Zhou, Y., Shen, S., Wang, C.: Raloc: Enhancing outdoor lidar localization via rotation awareness. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 3304–3313 (2025)
2025
-
[73]
International Journal of Computer Vision132, 3139 – 3171 (2024)
Yin, H., Xu, X., Lu, S., Chen, X., Xiong, R., Shen, S., Stachniss, C., Wang, Y.: A survey on global lidar localization: Challenges, advances and open problems. International Journal of Computer Vision132, 3139 – 3171 (2024)
2024
-
[74]
In: IEEE/RSJ International Conference on Intelligent Robots and Systems
Yin, K., Gao, T., Kong, H.: Pathfinder for low-altitude aircraft with binary neu- ral network. In: IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 20692–20699 (2025)
2025
-
[75]
In: Proceedings of the IEEE/CVF International Conference on Computer Vision
Yin, K., Zhang, Z., Kong, S., Gao, T., Xu, C.Z., Kong, H.: Information- bottleneck driven binary neural network for change detection. In: Proceedings of the IEEE/CVF International Conference on Computer Vision. pp. 7176–7186 (2025)
2025
-
[76]
In: Proceedings of the 32nd ACM International Conference on Multimedia
Yin, P., Zhu, X., Song, J., Gao, L., Shen, H.T.: Si-bivit: Binarizing vision trans- formers with spatial interaction. In: Proceedings of the 32nd ACM International Conference on Multimedia. pp. 8169–8178 (2024)
2024
-
[77]
IEEE Transactions on Intelligent Trans- portation Systems24(1), 489–500 (2022)
Yu, S., Wang, C., Lin, Y., Wen, C., Cheng, M., Hu, G.: Stcloc: Deep lidar local- ization with spatio-temporal constraints. IEEE Transactions on Intelligent Trans- portation Systems24(1), 489–500 (2022)
2022
-
[78]
Pattern Recog- nition128, 108685 (2022)
Yu, S., Wang, C., Wen, C., Cheng, M., Liu, M., Zhang, Z., Li, X.: Lidar-based lo- calization using universal encoding and memory-aware regression. Pattern Recog- nition128, 108685 (2022)
2022
-
[79]
In: Proceedings of the IEEE/CVF international conference on computer vision
Zhang, L., Song, J., Gao, A., Chen, J., Bao, C., Ma, K.: Be your own teacher: Improve the performance of convolutional neural networks via self distillation. In: Proceedings of the IEEE/CVF international conference on computer vision. pp. 3713–3722 (2019)
2019
-
[80]
IEEE Transactions on Pattern Analysis and Machine Intelligence45(4), 5099–5113 (2022)
Zhang, Q., Cheng, X., Chen, Y., Rao, Z.: Quantifying the knowledge in a dnn to explain knowledge distillation for classification. IEEE Transactions on Pattern Analysis and Machine Intelligence45(4), 5099–5113 (2022)
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.