Dynamic sliding and rolling friction models for linear viscoelastic contact pairs
Pith reviewed 2026-06-27 14:30 UTC · model grok-4.3
The pith
A PDE framework for viscoelastic sliding and rolling contact preserves hyperbolicity and links the two processes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Combining linear viscoelastic rheologies for bristle-like elements with nonlinear dynamic friction models produces a class of viscoelasto-kinematic equations formulated as PDEs for the evolution of frictional force, bristle deformations, and internal state variables; linear viscoelasticity preserves the hyperbolic character of the PDE systems typical in rolling contact, and sliding and rolling therefore exhibit closely related underlying dynamics.
What carries the argument
The viscoelasto-kinematic equations, a system of PDEs governing frictional force, bristle deformations, and internal state variables at the interface.
If this is right
- The same PDE framework applies to a broad class of viscoelastic frictional systems.
- Mathematical analysis of hyperbolicity developed for rolling contact carries over to sliding contact.
- Sliding and rolling contact can be treated with a single set of equations rather than as distinct processes.
Where Pith is reading between the lines
- Numerical schemes already used for hyperbolic rolling-contact problems could be applied without change to sliding cases under this model.
- Stability questions for viscoelastic interfaces could be studied uniformly across contact types using standard hyperbolic PDE tools.
- The framework suggests that experimental data from one regime might inform predictions in the other without re-deriving the equations.
Load-bearing premise
Linear viscoelastic rheologies applied to bristle-like elements can be combined directly with nonlinear dynamic friction models to yield a well-posed PDE system for the interface without extra closure relations.
What would settle it
An explicit check on the characteristic speeds or eigenvalues of the derived PDE system for a chosen linear viscoelastic model that shows the system has become non-hyperbolic.
Figures



read the original abstract
This paper considers the sliding and rolling contact between viscoelastic bodies. Combining linear viscoelastic rheologies for bristle-like elements with nonlinear dynamic friction models, it derives a class of viscoelasto-kinematic equations, formulated as a system of partial differential equations (PDEs) governing the evolution of the frictional force, bristle deformations, and internal state variables at the interface between the contacting bodies. The resulting system is analysed mathematically, demonstrating that linear viscoelasticity preserves the hyperbolic character of the PDE systems typically encountered in rolling contact. The proposed theory is illustrated through representative examples of both sliding and rolling contact, highlighting that these two processes, whilst often treated as distinct, may in fact exhibit closely related underlying dynamics. Overall, the framework provides a general theoretical setting applicable to a broad class of viscoelastic frictional systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops a theoretical framework for dynamic sliding and rolling friction between linear viscoelastic bodies. It combines linear viscoelastic rheologies applied to bristle-like elements with nonlinear dynamic friction models to derive a system of PDEs governing the evolution of frictional force, bristle deformations, and internal state variables. Mathematical analysis demonstrates that linear viscoelasticity preserves the hyperbolic character of the resulting PDE system. The theory is illustrated with representative examples of sliding and rolling contact, which are used to argue that the two processes share closely related underlying dynamics. The framework is positioned as a general setting for a broad class of viscoelastic frictional systems.
Significance. If the derivations hold, the work supplies a unified PDE-based description that bridges sliding and rolling contact in viscoelastic settings, an area where the two are typically modeled separately. The explicit computation of characteristic speeds to confirm that they remain real (hence hyperbolic) for the chosen rheologies is a clear strength, directly supporting well-posedness without additional closure relations. The examples follow from the same system, providing a concrete demonstration of the claimed dynamical similarity.
minor comments (3)
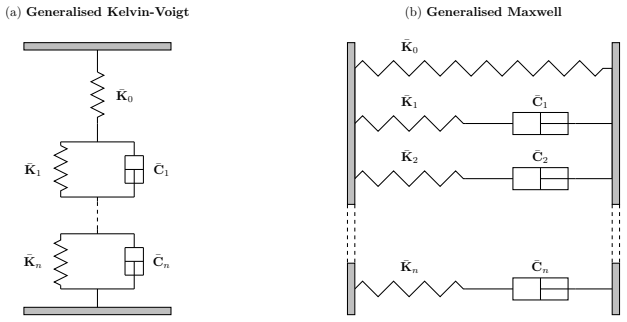
- [Abstract] The abstract refers to 'representative examples' without naming the specific linear viscoelastic rheologies (e.g., Kelvin-Voigt, standard linear solid) or the form of the nonlinear friction law employed in the illustrations; adding this detail would improve immediate readability.
- Notation for the internal state variables and the precise definition of the bristle deformation vector could be introduced earlier (e.g., in the problem statement) to aid readers who are not already familiar with dynamic friction bristle models.
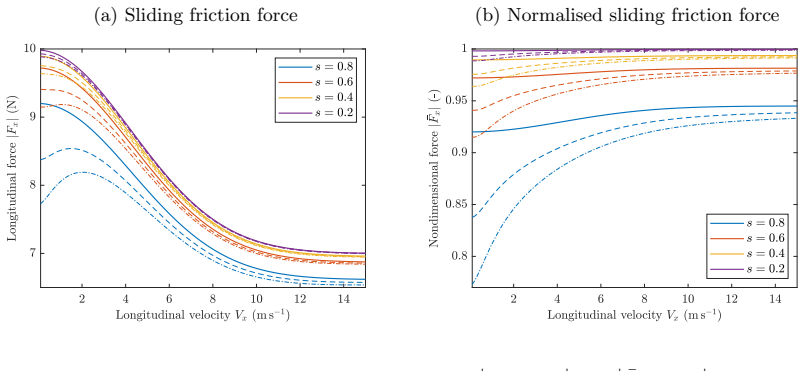
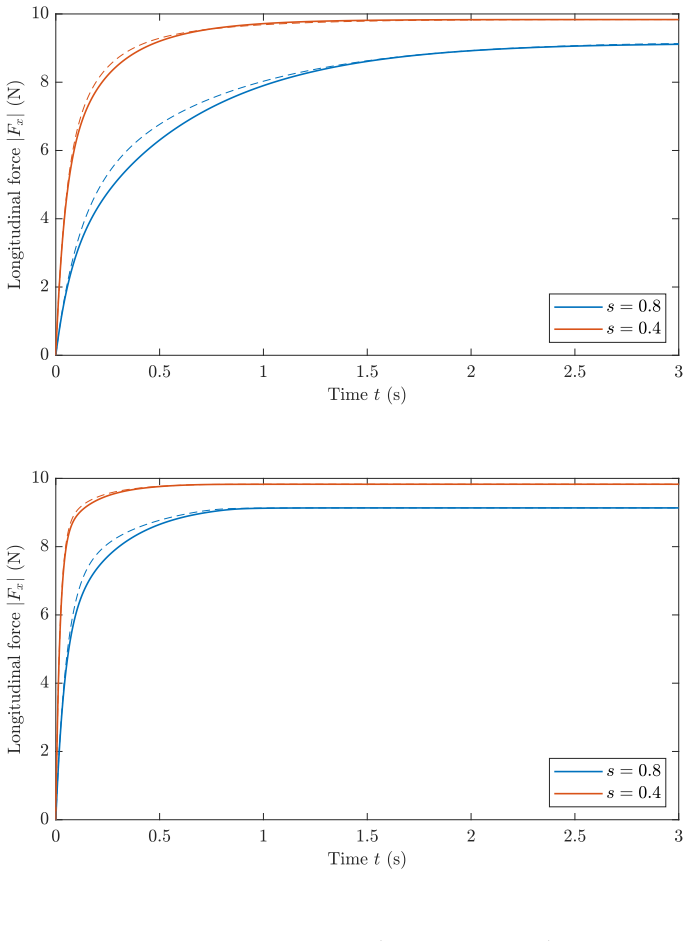
- Figure captions for the example solutions would benefit from explicit statements of the parameter values used (e.g., relaxation times, friction coefficients) so that the plots can be reproduced from the text alone.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the manuscript and their recommendation to accept. No major comments were raised in the report.
Circularity Check
No significant circularity identified
full rationale
The manuscript derives the viscoelasto-kinematic PDE system by direct substitution of linear viscoelastic constitutive relations into the bristle friction framework, then explicitly computes characteristic speeds to confirm they remain real. Examples for sliding and rolling follow from the same system with no additional closure relations or stability conditions. No step reduces a central claim to a fitted input, self-citation chain, or definitional equivalence; the derivation is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Theory of rubber friction and contact mechanics
Persson BNJ. Theory of rubber friction and contact mechanics. The Journal of Chemical Physics 115(8):3840-3861 (2001). Available from:https://doi.org/10.1063/1.1388626
-
[2]
Rubber friction: role of the flash temperature
Persson BNJ. Rubber friction: role of the flash temperature. J. Phys.: Condens. Matter 18 7789 (2006). Available from:https://doi.org/10.1088/0953-8984/18/32/025
-
[4]
Marques F, Flores P, Pimenta Claro JC, Lankarani HM. A survey and comparison of several friction force models for dynamic analysis of multibody mechanical systems. Nonlinear Dyn 86(3):1407–1443 (2016). Available from:https://doi.org/10.1007/s11071-016-2999-3
-
[5]
Modeling and analysis of friction including rolling effects in multibody dynamics: a review
Marques F, Flores P, Claro JCP, et al. Modeling and analysis of friction including rolling effects in multibody dynamics: a review. Multibody Syst Dyn 45:223–244 (2019). Available from: https: //doi.org/10.1007/s11044-018-09640-6
-
[6]
B. Wang, H. Jin, H. Yin, et al., ”Friction dynamics identification based on quadratic approximation of LuGre model,” Nonlinear Dyn., vol. 112, no. 10, pp. 6357–6377, 2024, doi: 10.1007/s11071-024- 09331-2
-
[7]
G. A. Waltersson and Y. Karayiannidis, ”Planar friction modeling with LuGre dynamics and limit surfaces,” IEEE Trans. Robot., vol. 40, no. 6, pp. 3166–3180, 2024, doi: 10.1109/TRO.2024.3410455
-
[8]
Modeling of spherical robots rolling on generic surfaces
Hogan FR, Forbes JR. Modeling of spherical robots rolling on generic surfaces. Multibody Syst Dyn 35:91–109 (2015). Available from:https://doi.org/10.1007/s11044-014-9438-3
-
[9]
Modeling chain continuously variable transmission for direct implementation in transmission control
Yildiz Y, Piccininni A, Bottiglione F, Carbone G. Modeling chain continuously variable transmission for direct implementation in transmission control. Mechanism and Machine Theory 105:428–440 (2016). Available from:https://doi.org/10.1016/j.mechmachtheory.2016.07.015
-
[10]
Physics-based modeling of a chain continuously variable transmis- sion
Duan C, Hebbale K, Liu F, Yao J. Physics-based modeling of a chain continuously variable transmis- sion. Mechanism and Machine Theory 105:397–408 (2016). Available from: https://doi.org/10. 1016/j.mechmachtheory.2016.07.018
2016
-
[11]
Information transfer rate in BCIs: Towards tightly integrated symbiosis
Kumaran VU, Weiss L, Zogg M, Wegener K. Analytical flat belt drive model considering bilinear elastic behaviour with residual strains. Mechanism and Machine Theory 190 (2023). Available from: https://doi.org/10.1016/j.mechmachtheory.2023.105466. 24
-
[12]
Frendo F, Bucchi F. “Brush model” for the analysis of flat belt transmissions in steady-state conditions. Mechanism and Machine Theory 143:103653 (2020). Available from: https://doi.org/ 10.1016/j.mechmachtheory.2019.103653
-
[13]
Frendo F, Bucchi F. Enhanced brush model for the mechanics of power transmission in flat belt drives under steady-state conditions: effect of belt elasticity. Mechanism and Machine Theory 153:103998 (2020). Available from:https://doi.org/10.1016/j.mechmachtheory.2020.103998
-
[14]
Bucchi F, Frendo F. Validation of the brush model for the analysis of flat belt transmissions in steady-state conditions by finite element simulation. Mechanism and Machine Theory 167:104556 (2022). Available from:https://doi.org/10.1016/j.mechmachtheory.2021.104556
-
[15]
Santeramo M, Putignano C, Vorlaufer G, Krenn S, Carbone G. Viscoelastic steady-state rolling contacts: a generalized boundary element formulation for conformal and non-conformal geometries. Journal of the Mechanics and Physics of Solids 171 (2023). Available from: https://doi.org/10. 1016/j.jmps.2022.105129
arXiv 2023
-
[16]
Simulating gear and bearing interactions in the presence of faults: Part I
Sawalhi N, Randall RB. Simulating gear and bearing interactions in the presence of faults: Part I. The combined gear–bearing dynamic model and the simulation of localised bearing faults. Mech Syst Signal Process 22(8):1924–1951 (2008). Available from: https://doi.org/10.1016/j.ymssp.2007. 12.001
-
[17]
Advanced bearing diagnostics: a comparative study of two powerful approaches
Abboud D, Elbadaoui M, Smith WA, Randall RB. Advanced bearing diagnostics: a comparative study of two powerful approaches. Mech Syst Signal Process 114:604–627 (2019). Available from: https://doi.org/10.1016/j.ymssp.2018.05.011
-
[18]
Liu Y, Yan C, Shi J, et al. Nonlinear dynamic analysis of supporting bearings in a rotor–bearing system considering vibration interaction. Nonlinear Dyn 113:22435–22458 (2025). Available from: https://doi.org/10.1007/s11071-025-11350-6
-
[19]
Dynamic characteristic analysis of a gear–rotor–bearing coupling system considering bearing fit
Zeng Q, Liu Y, Du W, et al. Dynamic characteristic analysis of a gear–rotor–bearing coupling system considering bearing fit. Nonlinear Dyn 113:2131–2154 (2025). Available from: https://doi.org/10. 1007/s11071-024-10290-x
2025
-
[20]
Rail Vehicle Dynamics
Knothe K, Stichel S. Rail Vehicle Dynamics. 1st ed. Springer, Cham (2016)
2016
-
[21]
Three-Dimensional Elastic Bodies in Rolling Contact
Kalker JJ. Three-Dimensional Elastic Bodies in Rolling Contact. 1st ed. Springer, Dordrecht (1990). Available from:https://doi.org/10.1007/978-94-015-7889-9
-
[22]
Rolling Contact Phenomena
Kalker JJ. Rolling Contact Phenomena. In: Jacobson B, Kalker JJ (eds) Rolling Contact Phenomena. International Centre for Mechanical Sciences, vol. 411. Springer, Vienna (2000)
2000
-
[23]
The Science of Vehicle Dynamics
Guiggiani M. The Science of Vehicle Dynamics. 3rd ed. Springer, Cham (2023). Available from: https://doi.org/10.1007/978-3-031-06461-6
-
[24]
A thermo-frictional tyre model including the effect of flash temperature
Mavros G. A thermo-frictional tyre model including the effect of flash temperature. Vehicle Sys- tem Dynamics, 57(5):721-751 (2019). Available from:https://doi.org/10.1080/00423114.2018. 1484147
-
[25]
Romano L. Advanced Brush Tyre Modelling. SpringerBriefs in Applied Sciences. Springer, Cham (2022). Available from:https://doi.org/10.1007/978-3-030-98435-9
-
[26]
Tire tread wear characteristics: insights from indoor experiments and analytical modeling
Zhang M, Unrau HJ, Gießler M, Gauterin F. Tire tread wear characteristics: insights from indoor experiments and analytical modeling. Tribology International 10 (2025). Available from: https: //doi.org/10.1016/j.triboint.2025.110752
-
[28]
A new model for control of systems with friction
Canudas-de-Wit C, Olsson H, ˚Astr¨ om KJ, Lischinsky P. A new model for control of systems with friction. IEEE Trans Autom Control 40(3):419–425 (1995)
1995
-
[29]
Control Systems with Friction
Olsson H. Control Systems with Friction. Doctoral thesis, Lund Institute of Technology (1996)
1996
-
[30]
Revisiting the LuGre friction model
˚Astr¨ om KJ, Canudas-de-Wit C. Revisiting the LuGre friction model. IEEE Control Syst Mag 28(6):101–114 (2008)
2008
-
[31]
Stability of steady frictional slipping
Rice JR and Ruina AL. Stability of steady frictional slipping. Journal of Applied Mechanics 50(2):343– 349 (1983). Available from:https://doi.org/10.1115/1.3167042
-
[32]
An integrated friction model with improved presliding behavior
Swevers J, Al-Bender F, Ganseman CG, Projogo T. An integrated friction model with improved presliding behavior. IEEE Trans Autom Control 45(4):675–686 (2000)
2000
-
[33]
Modification of the Leuven integrated friction model
Lampaert V, Swevers J, Al-Bender F. Modification of the Leuven integrated friction model. IEEE Trans Autom Control 47(4):683–687 (2002)
2002
-
[34]
Elasto-plastic friction model: contact compliance and stiction
Dupont P, Armstrong B, Hayward V. Elasto-plastic friction model: contact compliance and stiction. Proc. 2000 American Control Conference, 1072–1077 (2000)
2000
-
[35]
Single-state elasto-plastic friction models
Dupont P, Hayward V, Armstrong B, et al. Single-state elasto-plastic friction models. IEEE Trans 25 Autom Control 47:787–792 (2002)
2002
-
[36]
The generalized Maxwell-slip model: A novel model for friction simulation and compensation
Al-Bender F, Lampaert V, Swevers J. The generalized Maxwell-slip model: A novel model for friction simulation and compensation. IEEE Transactions on Automatic Control 50(11):1883-1887 (2005). Available from:https://doi.org/10.1109/TAC.2005.858676
-
[37]
Romano L, Aamo OM, ˚Aslund J, Frisk E. First-order friction models with bristle dynamics: lumped and distributed formulations, arXiv:2602.09429. IEEE Trans Control Syst Technol (2026)
arXiv 2026
-
[38]
Two-dimensional FrBD friction models for rolling contact
Romano L. Two-dimensional FrBD friction models for rolling contact. Nonlinear Dyn (2026)
2026
-
[39]
Two-dimensional FrBD friction models for rolling contact: extension to linear viscoelas- ticity, Tribology International 220, 111953 (2026)
Romano L. Two-dimensional FrBD friction models for rolling contact: extension to linear viscoelas- ticity, Tribology International 220, 111953 (2026)
2026
-
[40]
Transient phenomena in two elastic cylinders rolling over each other with dry friction
Kalker JJ. Transient phenomena in two elastic cylinders rolling over each other with dry friction. J Appl Mech 37(3):677–688 (1970). Available from:https://doi.org/10.1115/1.3408597
-
[41]
Transient rolling contact phenomena
Kalker JJ. Transient rolling contact phenomena. ASLE Trans 14(3):177–184 (1971). Available from: https://doi.org/10.1080/05698197108983240
-
[42]
On the Rolling Contact of Two Elastic Bodies in the Presence of Dry Friction
Kalker JJ. On the Rolling Contact of Two Elastic Bodies in the Presence of Dry Friction. PhD thesis, TH Delft (1967)
1967
-
[43]
The rolling contact of a rigid cylinder with a viscoelastic half space
Hunter SC. The rolling contact of a rigid cylinder with a viscoelastic half space. Trans. ASME, Ser. E, J. Appl. Mech. 28:611–617 (1961)
1961
-
[44]
Contact problem of rolling of a viscoelastic cylinder on a base of the same ma- terial
Goryacheva I. Contact problem of rolling of a viscoelastic cylinder on a base of the same ma- terial. J. Appl. Math. Mech. 37(5), 925933 (1973). Available from: https://doi.org/10.1016/ 0021-8928(73)90017-8
1973
-
[45]
Contact characteristics of a rolling/sliding cylinder and a viscoelastic layer bonded to an elastic substrate
Goryacheva I, Sadeghi F. Contact characteristics of a rolling/sliding cylinder and a viscoelastic layer bonded to an elastic substrate. Wear 184(2):125-132 (1995). Available from: https://doi.org/10. 1016/0043-1648(94)06561-6
1995
-
[46]
Sliding of a spherical indenter on a viscoelastic foundation with the forces of molecular attraction taken into account
Goryacheva IG, Gubenko MM, Makhovskaya YY. Sliding of a spherical indenter on a viscoelastic foundation with the forces of molecular attraction taken into account. Prikl. J. Appl. Mech. Tech. Phys., 55(1):81–88 (2014)
2014
-
[47]
Goryacheva IG, Yakovenko AA: Indentation of a rigid cylinder with a flat rough base into a thin viscoelastic layer. J. Appl. Mech. Tech. Phys., 62(5):723–735 (2021)
2021
-
[48]
Contact Mechanics in Tribology
Goryacheva IG. Contact Mechanics in Tribology. 1st ed. Springer Dordrecht (2010). Available from: https://doi.org/10.1007/978-94-015-9048-8
-
[49]
Three-dimensional Contact of a Rigid Roller Traversing a Viscoelastic Half Space
Panek C, Kalker JJ. Three-dimensional Contact of a Rigid Roller Traversing a Viscoelastic Half Space. J. Inst. Maths Applies 26:299-313 (1980)
1980
-
[50]
Viscoelastic Multilayered Cylinders Rolling With Dry Friction
Kalker JJ. Viscoelastic Multilayered Cylinders Rolling With Dry Friction. ASME. J. Appl. Mech. September 58(3):666–679 (1991). Available from:https://doi.org/10.1115/1.2897247
-
[51]
On the rolling contact problem of two elastic solids with graded coatings
G¨ uler MA, Alinia Y, Adibnazari S. On the rolling contact problem of two elastic solids with graded coatings. Int J Mech Sci 64:62-81 (2012)
2012
-
[52]
Subsurface stress evolution under orthotropic wear and frictional contact conditions
Juli´ a JM, Rodr´ ıguez-Tembleque L. Subsurface stress evolution under orthotropic wear and frictional contact conditions. Int J Mech Sci 234:107695 (2022)
2022
-
[53]
Wear and subsurface stress evolution in tractive rolling contact
Juli´ a JM, Rodr´ ıguez-Tembleque L. Wear and subsurface stress evolution in tractive rolling contact. Int J Mech Sci 294, 110195, ISSN 0020-7403 (2025)
2025
-
[54]
New Developments in the Theory of Wheel/Rail Contact Mechanics
Nielsen JB. New Developments in the Theory of Wheel/Rail Contact Mechanics. PhD thesis, Tech- nical University of Denmark (1998). Available from: https://orbit.dtu.dk/en/publications/ new-developments-in-the-theory-of-wheelrail-contact-mechanics
1998
-
[55]
Transient rolling of cylindrical contacts with constant and linearly increasing applied slip
Dahlberg J, Alfredsson B. Transient rolling of cylindrical contacts with constant and linearly increasing applied slip. Wear 266:316–326 (2009). Available from: https://doi.org/10.1016/j.wear.2008. 07.008
-
[56]
Johnson KL. Contact Mechanics. Cambridge University Press (1985). Available from: https: //doi.org/10.1017/CBO9781139171731
-
[57]
Simplified theory of rolling contact
Kalker JJ. Simplified theory of rolling contact. Delft Progress Report, Series C (1973), 1–10
1973
-
[58]
Tire and Vehicle Dynamics
Pacejka HB. Tire and Vehicle Dynamics. 3rd ed. Elsevier, Amsterdam (2012)
2012
-
[59]
Vehicle dynamics: Theory and Application, 4th ed
Jazar RN. Vehicle dynamics: Theory and Application, 4th ed. Springer Cham (2025)
2025
-
[60]
Railway wheel and automotive tyre
Kalker JJ. Railway wheel and automotive tyre. Veh Syst Dyn 5(15):255–269 (1979)
1979
-
[61]
Assessing the accuracy of simplified frictional rolling contact algorithms
Vollebregt EAH, Iwnicki SD, Xie G, Shackelton P. Assessing the accuracy of simplified frictional rolling contact algorithms. Veh Syst Dyn 50(1):1–17 (2012). Available from: https://doi.org/10. 1080/00423114.2011.552618
arXiv 2012
-
[62]
Short-wavelength rail corrugation and non-steady-state contact mechanics
Knothe K, Groß-Thebing A. Short-wavelength rail corrugation and non-steady-state contact mechanics. Veh Syst Dyn 46(1–2):49–66 (2008). Available from: https://doi.org/10.1080/ 00423110701590180. 26
2008
-
[63]
Non-steady-state modelling of wheel–rail contact for dynamic simulation of railway vehicles
Alonso A, Gim´ enez JG. Non-steady-state modelling of wheel–rail contact for dynamic simulation of railway vehicles. Veh Syst Dyn 46(3):179–196 (2008). Available from: https://doi.org/10.1080/ 00423110701248011
2008
-
[64]
Non-steady-state modelling of wheel–rail contact
Guiral A, Alonso A, Baeza L, Gim´ enez JG. Non-steady-state modelling of wheel–rail contact. Veh Syst Dyn 51(1):91–108 (2013). Available from:https://doi.org/10.1080/00423114.2012.713499
-
[65]
Influence of longitudinal creepage and wheel inertia on short-pitch corruga- tion
Ciavarella M, Barber J. Influence of longitudinal creepage and wheel inertia on short-pitch corruga- tion. Proc IMechE Part J: Eng Tribol 222(3) (2008). Available from: https://doi.org/10.1243/ 13506501JET373
2008
-
[66]
Short-pitch rail corrugation: a resonance-free regime? Wear 266:9–10 (2008)
Afferrante L, Ciavarella M. Short-pitch rail corrugation: a resonance-free regime? Wear 266:9–10 (2008). Available from:https://doi.org/10.1016/j.wear.2008.12.003
-
[67]
A modification on velocity terms of Reynolds equation in a spherical coordinate system
Afferrante L, Ciavarella M. Short-pitch corrugation of railway tracks with wooden or concrete sleepers: an enigma solved? Tribol Int 43(3) (2010). Available from: https://doi.org/10.1016/j.triboint. 2009.09.010
-
[68]
A model of the transient behavior of tractive rolling contacts
Al-Bender F, De Moerlooze K. A model of the transient behavior of tractive rolling contacts. Advances in Tribology (2008). Available from:https://doi.org/10.1155/2008/214894
-
[69]
Romano L, Bruzelius F, Jacobson B. Unsteady-state brush theory. Veh Syst Dyn (2020). Available from:https://doi.org/10.1080/00423114.2020.1774625
-
[70]
Romano L, Timpone F, Bruzelius F, Jacobson B. Analytical results in transient brush tyre models: theory for large camber angles and classic solutions with limited friction. Meccanica 57:165–191 (2022). Available from:http://dx.doi.org/10.1007/s11012-021-01422-3
-
[71]
Rolling, tilting and spinning spherical wheels: analytical results using brush theory
Romano L, Timpone F, Bruzelius F, Jacobson B. Rolling, tilting and spinning spherical wheels: analytical results using brush theory. Mechanism and Machine Theory 173:104836 (2022). Available from:https://doi.org/10.1016/j.mechmachtheory.2022.104836
-
[72]
An extended LuGre-brush tyre model for large camber angles and turning speeds
Romano L, Bruzelius F, Jacobson B. An extended LuGre-brush tyre model for large camber angles and turning speeds. Veh Syst Dyn (2022). Available from: https://doi.org/10.1080/00423114. 2022.2086887
-
[73]
Transient wheel–rail rolling contact theories
Romano L, Maglio M, Bruni S. Transient wheel–rail rolling contact theories. Tribology International (2023)
2023
-
[74]
Kinematics of rolling contact: derivation, misconceptions, and generalisations
Romano L. Kinematics of rolling contact: derivation, misconceptions, and generalisations. Mechanism and Machine Theory, 216 (2025). Available from: https://doi.org/10.1016/j.mechmachtheory. 2025.106201
-
[75]
Introduction to polymer viscoelasticity
Shaw MT, MacKnight WJ. Introduction to polymer viscoelasticity. Wiley, Amsterdam (2018)
2018
-
[76]
The science and technology of rubber
Mark JE, Erman B, Roland M. The science and technology of rubber. Academic press, London (2013)
2013
-
[77]
Engineering viscoelasticity
Gutierrez-Lemini D. Engineering viscoelasticity. Springer, New York (2014)
2014
-
[78]
Three-dimensional rolling/sliding contact on a viscoelastic layered half-space
Wallace ER, Chaise T, Nelias D. Three-dimensional rolling/sliding contact on a viscoelastic layered half-space. Journal of the Mechanics and Physics of Solids 143, 104067 (2020)
2020
-
[79]
A novel methodology to predict sliding and rolling friction of viscoelastic materials: Theory and experiments
Carbone G, Putignano P. A novel methodology to predict sliding and rolling friction of viscoelastic materials: Theory and experiments. Journal of the Mechanics and Physics of Solids 61(8):1822-1834 (2013)
2013
-
[80]
Rolling contact of a rigid sphere/sliding of a spherical indenter upon a viscoelastic half-space containing an ellipsoidal inhomogeneity
Koumi KE, Chaise T, Nelias D. Rolling contact of a rigid sphere/sliding of a spherical indenter upon a viscoelastic half-space containing an ellipsoidal inhomogeneity. Journal of the Mechanics and Physics of Solids 80:1-25 (2015)
2015
-
[81]
Serra-Aguila A, Puigoriol-Forcada JM, Reyes G, et al. Viscoelastic models revisited: characteristics and interconversion formulas for generalized Kelvin–Voigt and Maxwell models. Acta Mech. Sin. 35:1191–1209 (2019). Available from:https://doi.org/10.1007/s10409-019-00895-6
-
[82]
Interconversion of Prony series for relaxation and creep
Loy RJ, de Hoog FR, Anderssen RS. Interconversion of Prony series for relaxation and creep. J. Rheol. 59, 1261–1270 (2015)
2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.