Benchmarking stereo reconstruction for 3D printable Martian terrain models
Pith reviewed 2026-06-27 14:05 UTC · model grok-4.3
The pith
Stereo methods that beat benchmarks on Middlebury show weaker edge alignment and higher reprojection error on Curiosity images for printable Martian terrain.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
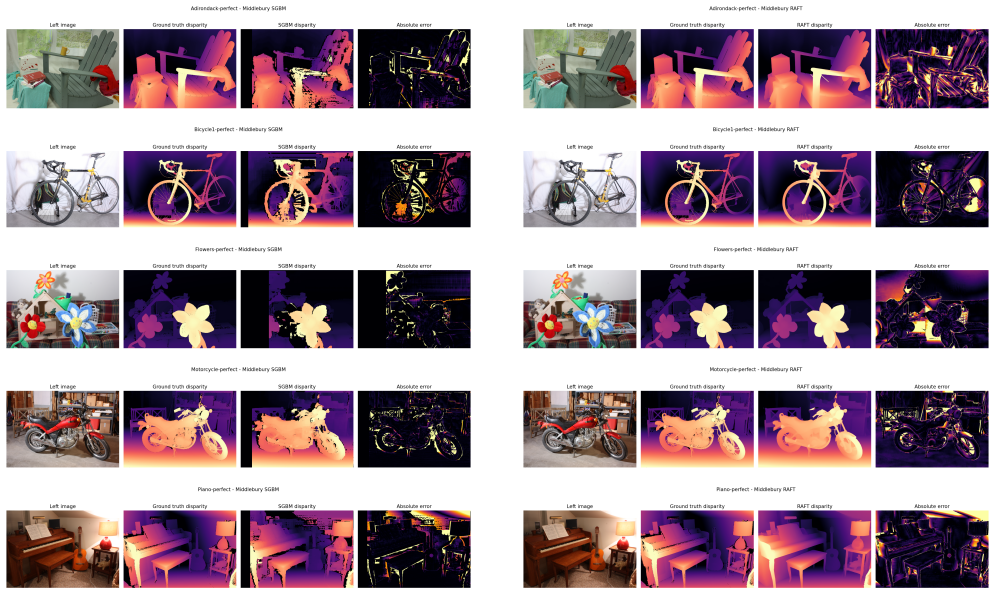
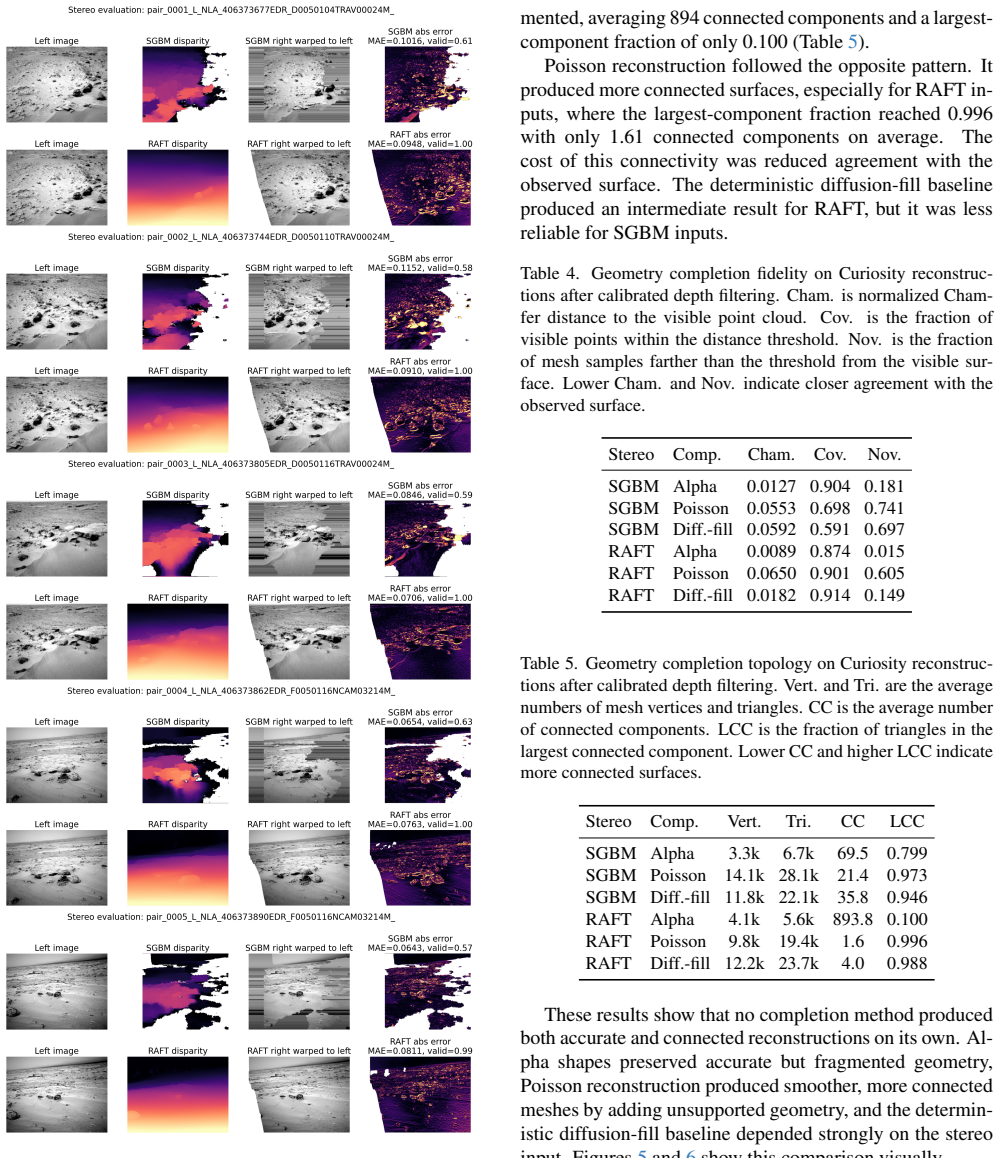
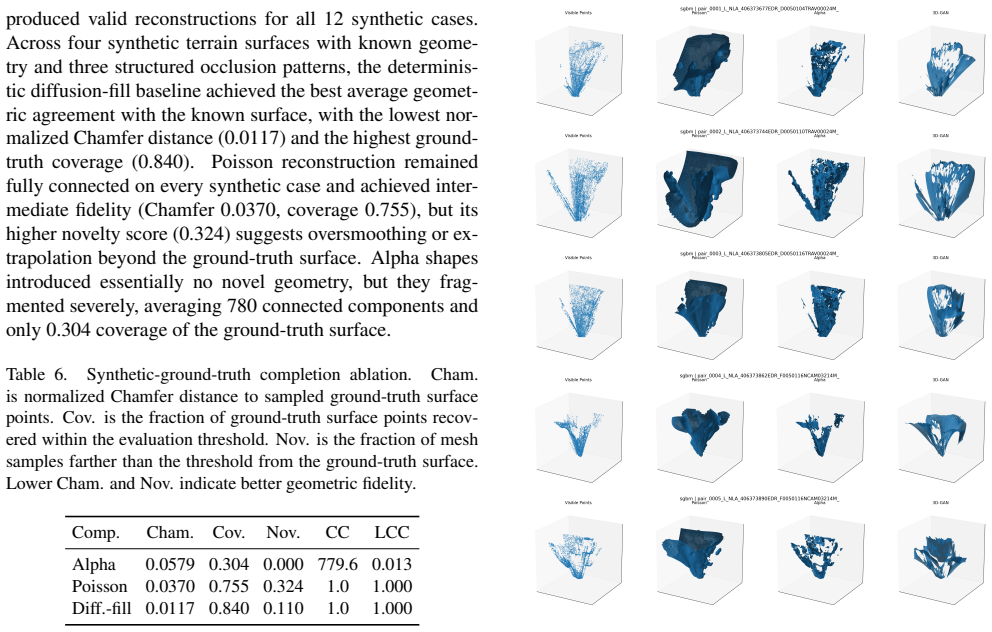
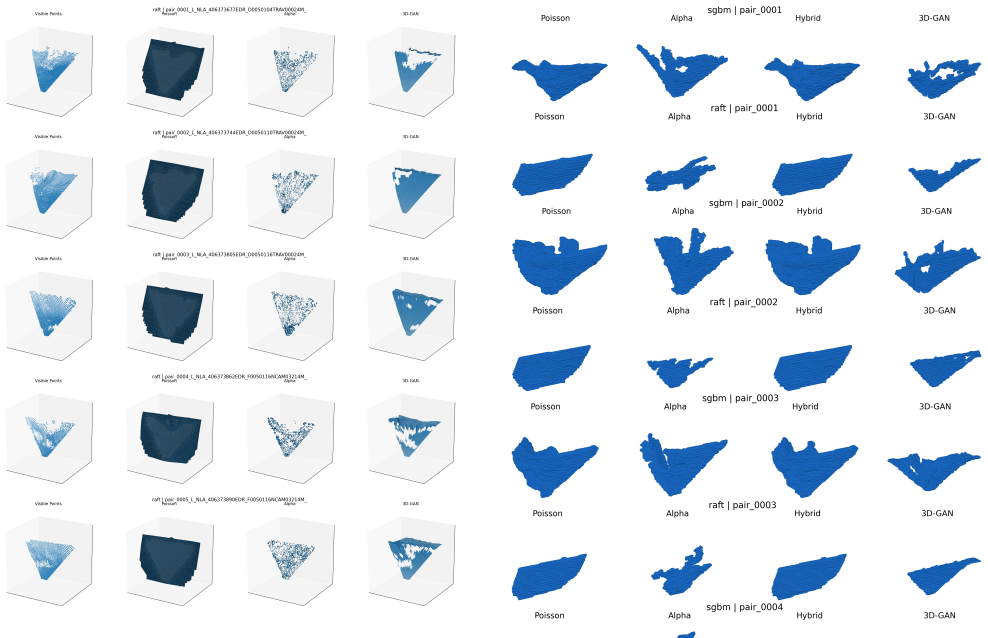
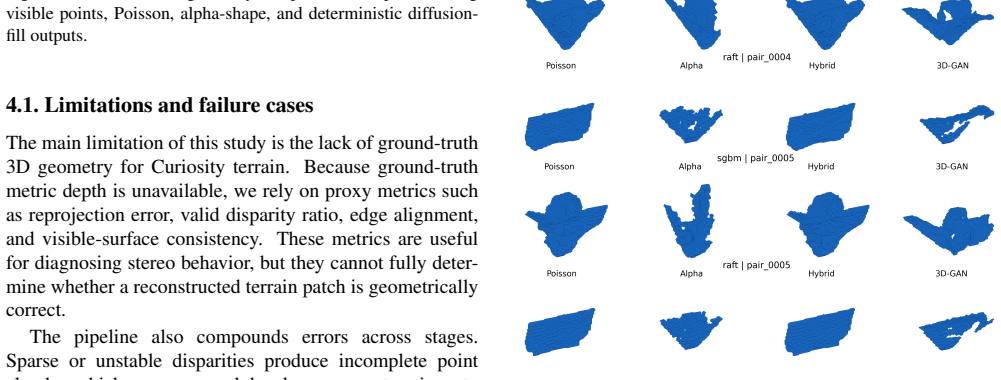
On Middlebury, RAFT-Stereo reduces disparity MAE from 3.22 px to 0.73 px and raises valid coverage to 100 percent over SGBM, but on Curiosity imagery the denser RAFT disparities exhibit weaker edge alignment and higher photometric reprojection error; geometry completion then reveals a fidelity-connectivity tradeoff in which alpha shapes keep accurate fragments, Poisson yields coherent but extrapolated surfaces, and diffusion fill sits between the two while remaining sensitive to input quality.
What carries the argument
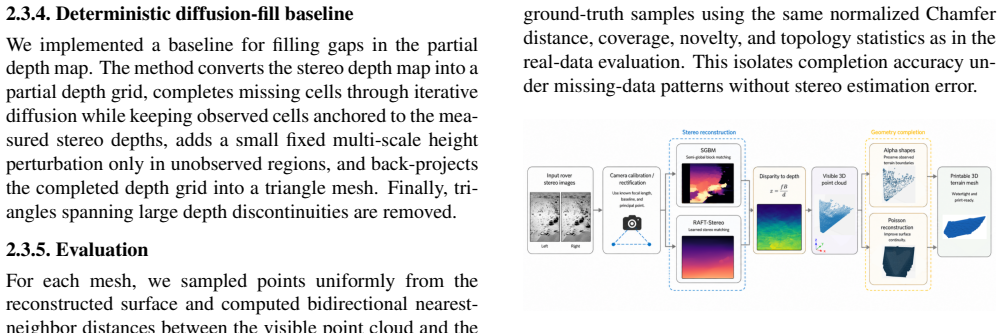
The end-to-end pipeline of stereo disparity estimation (RAFT-Stereo versus SGBM), followed by geometry completion (alpha shapes, Poisson reconstruction, or diffusion fill), and export to watertight OBJ meshes.
If this is right
- Standard stereo algorithms require domain adaptation for low-texture Martian surfaces before they can reliably feed printable models.
- Choice of completion method directly controls whether the output mesh is locally accurate or globally connected.
- Photometric reprojection error can serve as a practical check on reconstruction quality when ground-truth depth is unavailable.
- Printable approximations of Martian terrain are feasible with current tools but remain unreliable without rover-specific validation.
Where Pith is reading between the lines
- Mars-specific fine-tuning of depth networks could close the observed gap between benchmark and flight performance.
- Incorporating rover wheel odometry or orbital DEM constraints might reduce the fragmentation seen with alpha shapes.
- Physical printing and fit-testing of the meshes would provide a direct test of whether digital metrics predict real-world usability.
Load-bearing premise
Photometric reprojection error and edge alignment measured on Curiosity images are valid proxies for whether the resulting disparities will produce usable printable 3D meshes.
What would settle it
Finding a stereo algorithm that simultaneously achieves low Middlebury error and strong edge alignment plus low reprojection error on Curiosity imagery would falsify the claim that benchmark gains fail to transfer.
Figures
read the original abstract
Reconstructing printable 3D models from Mars rover imagery is challenging because Martian terrain is low-texture, irregular, and partially observed. We evaluate a pipeline that estimates stereo depth from NASA Curiosity images, completes geometry, and exports watertight OBJ meshes. On Middlebury, RAFT-Stereo outperforms semi-global block matching (SGBM), reducing disparity MAE from 3.22px to 0.73px and increasing valid prediction coverage from 76.3% to 100.0%. On Curiosity imagery, however, RAFT's denser disparities show weaker edge alignment and higher photometric reprojection error, suggesting that benchmark accuracy does not directly transfer to Martian terrain reconstruction. Geometry completion demonstrates a tradeoff between local fidelity and global connectivity. We find that alpha shapes preserve accurate but fragmented structure, Poisson reconstruction produces more coherent meshes but adds unsupported surfaces, and a deterministic diffusion-fill baseline is intermediate but sensitive to stereo quality. Overall, standard stereo and completion methods can produce printable approximations of Martian terrain, but reliable reconstruction requires stronger domain-specific validation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript evaluates a stereo reconstruction pipeline for generating 3D printable models of Martian terrain from NASA Curiosity rover imagery. It reports that RAFT-Stereo outperforms semi-global block matching (SGBM) on the Middlebury benchmark (disparity MAE reduced from 3.22 px to 0.73 px; valid coverage increased from 76.3% to 100%), but on Curiosity images RAFT produces denser disparities with weaker edge alignment and higher photometric reprojection error. Geometry completion methods (alpha shapes, Poisson reconstruction, deterministic diffusion-fill) are compared for tradeoffs between local fidelity and global connectivity, with the overall conclusion that standard methods can yield printable approximations but require stronger domain-specific validation because benchmark performance does not directly transfer.
Significance. If the empirical findings hold, the work usefully documents the domain gap between terrestrial stereo benchmarks and low-texture, partially observed Martian scenes, with direct relevance to planetary exploration and additive manufacturing. Concrete Middlebury numbers and Curiosity observations are reported; the absence of fitted parameters or self-referential predictions is a strength of the purely empirical design.
major comments (1)
- [Abstract] Abstract: the central claim that Middlebury accuracy does not transfer rests on RAFT exhibiting weaker edge alignment and higher photometric reprojection error on Curiosity imagery. These metrics are treated as direct proxies for inferior printable mesh quality, yet no quantitative correlation is shown to downstream mesh properties (watertightness, connected-component count, or geometric deviation after Poisson/alpha-shape completion). Because Martian scenes lack ground-truth geometry, the proxy assumption carries the full evidential weight for the transfer-failure conclusion.
minor comments (2)
- [Abstract] Abstract: no error bars, dataset sizes, or full pipeline details are supplied to support the transfer conclusion.
- [Abstract] Abstract: method acronyms (RAFT-Stereo, SGBM) and completion techniques should be defined on first use for clarity.
Simulated Author's Rebuttal
We thank the referee for highlighting this important point regarding our use of proxy metrics. We address the concern directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that Middlebury accuracy does not transfer rests on RAFT exhibiting weaker edge alignment and higher photometric reprojection error on Curiosity imagery. These metrics are treated as direct proxies for inferior printable mesh quality, yet no quantitative correlation is shown to downstream mesh properties (watertightness, connected-component count, or geometric deviation after Poisson/alpha-shape completion). Because Martian scenes lack ground-truth geometry, the proxy assumption carries the full evidential weight for the transfer-failure conclusion.
Authors: We agree that a direct quantitative correlation between the stereo metrics and final mesh properties would provide stronger support for the domain-gap claim. Edge alignment and photometric reprojection error were chosen as they are standard, literature-established indicators of disparity quality that affect point-cloud fidelity and downstream meshing. Because no ground-truth geometry exists for the Curiosity scenes, geometric deviation cannot be measured. We will revise the manuscript to add quantitative mesh statistics (watertightness rate and connected-component count) comparing RAFT-Stereo and SGBM outputs on the Martian imagery, and we will update the abstract to explicitly state that the cited metrics function as proxies in the absence of ground truth. revision: partial
- Direct quantitative correlation to geometric deviation after mesh completion, as no ground-truth 3D geometry is available for Curiosity imagery.
Circularity Check
Purely empirical benchmarking with no derivations or self-referential steps
full rationale
The paper evaluates existing stereo methods (RAFT-Stereo vs SGBM) and completion techniques on Middlebury and Curiosity data using direct metrics (disparity MAE, edge alignment, photometric reprojection error, mesh connectivity). No equations, fitted parameters presented as predictions, ansatzes, or uniqueness theorems appear. Central claims rest on observed experimental differences without any reduction to self-defined inputs or self-citation chains. The analysis is self-contained empirical reporting.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Middlebury stereo benchmark performance is a relevant indicator for method selection on Martian terrain
Reference graph
Works this paper leans on
-
[1]
ShapeNet: An Information-Rich 3D Model Repository
Angel X. Chang, Thomas A. Funkhouser, Leonidas J. Guibas, Pat Hanrahan, Qi-Xing Huang, Zimo Li, Silvio Savarese, Manolis Savva, Shuran Song, Hao Su, Jianxiong Xiao, Li Yi, and Fisher Yu. Shapenet: An information-rich 3d model repository.CoRR, abs/1512.03012, 2015. 1
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[2]
trimesh, 2019
Michael Dawson-Haggerty. trimesh, 2019. Version 4.12.2. 3
2019
-
[3]
Herbert Edelsbrunner and Ernst P. Mucke. Three- dimensional alpha shapes.ACM Transactions on Graphics, 13(1):43–72, 1994. 1, 2, 6
1994
-
[4]
On the shape of a set of points in the plane.IEEE Trans- actions on Information Theory, 29(4):551–559, 1983
Herbert Edelsbrunner, David Kirkpatrick, and Raimund Sei- del. On the shape of a set of points in the plane.IEEE Trans- actions on Information Theory, 29(4):551–559, 1983. 2
1983
-
[5]
Haoqiang Fan, Hao Su, and Leonidas J. Guibas. A point set generation network for 3d object reconstruction from a sin- gle image. InProceedings of the IEEE Conference on Com- puter Vision and Pattern Recognition (CVPR), pages 605– 613, 2017. 3
2017
-
[6]
Stereo processing by semiglobal match- ing and mutual information.IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2):328–341, 2008
Heiko Hirschmuller. Stereo processing by semiglobal match- ing and mutual information.IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2):328–341, 2008. 1, 2, 6
2008
-
[7]
Learning a multi-view stereo machine
Abhishek Kar, Christian H ¨ane, and Jitendra Malik. Learning a multi-view stereo machine. InAdvances in Neural Infor- mation Processing Systems. Curran Associates, Inc., 2017. 1
2017
-
[8]
Poisson surface reconstruction
Michael Kazhdan, Matthew Bolitho, and Hugues Hoppe. Poisson surface reconstruction. InEurographics Symposium on Geometry Processing, pages 61–70, 2006. 1, 2, 6
2006
-
[9]
Raft-stereo: Multilevel recurrent field transforms for stereo matching
Lahav Lipson, Zachary Teed, and Jia Deng. Raft-stereo: Multilevel recurrent field transforms for stereo matching. CoRR, abs/2109.07547, 2021. 1, 2, 6
-
[10]
Lorensen and Harvey E
William E. Lorensen and Harvey E. Cline. Marching cubes: A high resolution 3d surface construction algorithm. InACM SIGGRAPH Computer Graphics, pages 163–169, 1987. 3, 7
1987
-
[11]
Mars science laboratory (msl) Curiosity Raw Images
NASA Mars Exploration. Mars science laboratory (msl) Curiosity Raw Images. NASA Mars Exploration Website, 2012–2026. 1
2012
-
[12]
A taxonomy and evaluation of dense two-frame stereo correspondence algo- rithms.International Journal of Computer Vision, 47(1–3): 7–42, 2002
Daniel Scharstein and Richard Szeliski. A taxonomy and evaluation of dense two-frame stereo correspondence algo- rithms.International Journal of Computer Vision, 47(1–3): 7–42, 2002. 2
2002
-
[13]
High-resolution stereo datasets with subpixel-accurate ground truth
Daniel Scharstein, Heiko Hirschm ¨uller, York Kitajima, Greg Krathwohl, Nera Ne ˇsi´c, Xi Wang, and Porter West- ling. High-resolution stereo datasets with subpixel-accurate ground truth. InLecture Notes in Computer Science, pages 31–42, 2014. 6
2014
-
[14]
Learning a probabilistic latent space of ob- ject shapes via 3d generative-adversarial modeling
Jiajun Wu, Chengkai Zhang, Tianfan Xue, Bill Freeman, and Josh Tenenbaum. Learning a probabilistic latent space of ob- ject shapes via 3d generative-adversarial modeling. InAd- vances in Neural Information Processing Systems. Curran Associates, Inc., 2016. 1, 2 Benchmarking stereo reconstruction for 3D printable Martian terrain models Supplementary Material
2016
-
[15]
(6) In these expressions,HandWdenote the image height and width
Metric Definitions Stereo metrics.For Curiosity images, the valid disparity fraction and valid depth fraction were defined as rd = |Ωd| HW , r z = |Ωz| HW .(4) The corresponding valid sets were Ωd ={(u, v) :d(u, v)>0, d(u, v) finite},(5) Ωz ={(u, v) :z min < z(u, v)< z max, z(u, v) finite}. (6) In these expressions,HandWdenote the image height and width. ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.