JOIN: Anchor-Grasp-Conditioned Joining via Opposition, Inference, and Navigation for Bimanual Assistive Manipulation
Pith reviewed 2026-06-27 12:58 UTC · model grok-4.3
The pith
A vision-language model plus standard geometry lets a wheelchair anchor arm summon and position a mobile manipulator to finish bimanual daily tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
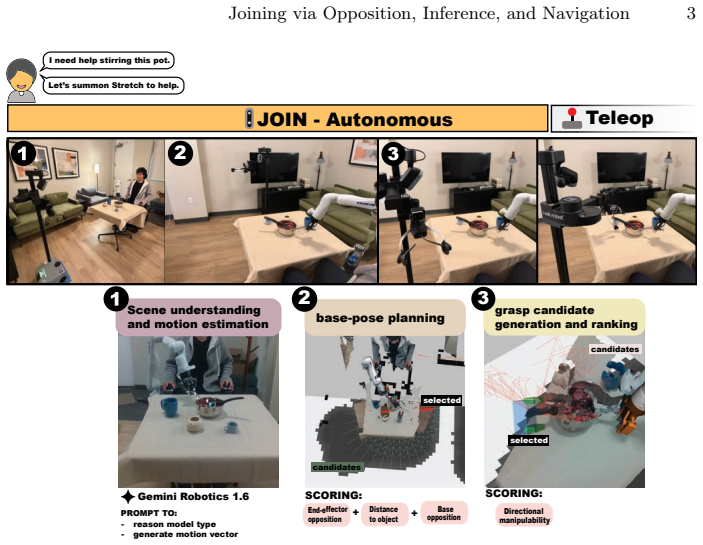
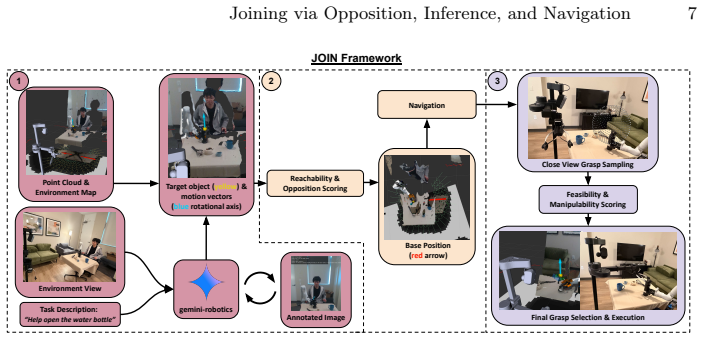
The central claim is that a vision-language model, when paired with ordinary geometric calculations, already contains enough task-level knowledge to solve bimanual joining: the anchor arm stays fixed on the wheelchair while the complement arm chooses its base pose and grasp so that the pair can complete the activity. The system realizes this by first querying the model for task structure, then scoring candidate complement locations with the opposition and manipulability metrics, and finally executing the three phases without training extra policies.
What carries the argument
The three-phase decomposition (plan, drive, grasp) together with the wheelchair-referenced opposition score and task-conditioned directional manipulability that convert VLM outputs into physical base and grasp choices.
If this is right
- The same-object and different-object tasks both become feasible with the same pipeline.
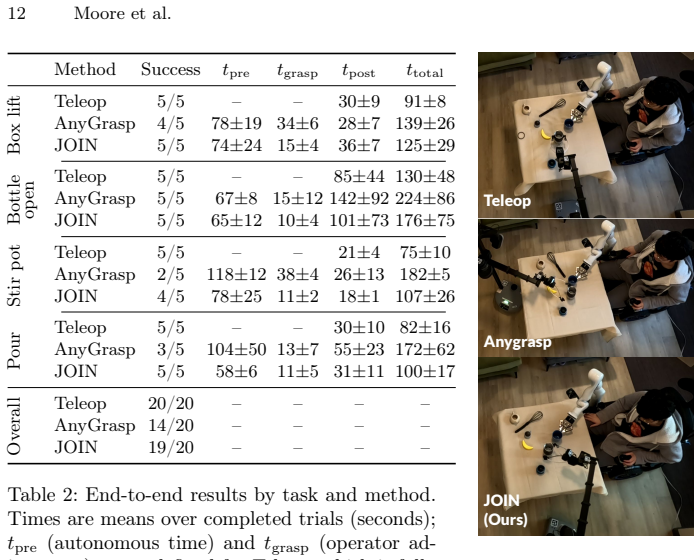
- Nineteen of twenty attempts succeed, exceeding the fourteen of twenty achieved by prior methods.
- The operator supplies markedly fewer corrections during execution.
- Heterogeneous on-demand bimanual setups avoid the power, cost, and space penalties of permanent dual-arm wheelchairs.
Where Pith is reading between the lines
- The approach could let existing single-arm wheelchair users add a second arm only when needed rather than buying specialized hardware.
- If the geometric scores generalize, the same VLM-plus-geometry pattern might apply to other mobile bases or different anchor geometries without retraining.
- Extending the opposition and manipulability scores to additional task types would test whether the method scales beyond the evaluated meal-preparation and tray-lifting examples.
Load-bearing premise
The three-phase breakdown plus the two geometric scores are enough to turn vision-language model suggestions into reliable actions without extra learned policies or heavy real-world tuning.
What would settle it
On a held-out set of bimanual tasks the success rate drops below 70 percent or the average number of operator corrections per trial rises above the level reported for the baseline methods.
Figures
read the original abstract
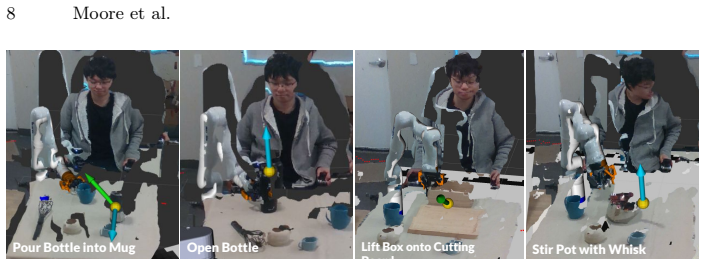
Assistive mobility and manipulation platforms have received increasing attention as a means of restoring independence to individuals with disabilities. While effective for many basic activities of daily living (ADLs), a significant percentage of everyday tasks such as opening a jar, pouring a liquid, lifting a tray, or basic meal preparation, is fundamentally bimanual and remains out of reach for any single-arm system. Adding a second arm to a wheelchair is impractical, due to the additional power draw, cost, and the loss of space required for transfers and mobility. We instead propose a heterogeneous, on-demand bimanual system, in which a wheelchair-mounted anchor arm is joined when needed by a summoned mobile manipulator that serves as a complement arm. The central technical problem, which we call bimanual joining, is conditional: the anchor has already committed to a grasp, and the complement arm must choose where to stand and what to grasp to complete the task. We formulate bimanual joining as a three-phase decomposition (plan, drive, grasp) and show that a vision-language model (VLM), coupled with standard geometric tools, provides task-level knowledge sufficient to solve a representative class of bimanual ADLs. Our system JOIN, contributes (i) a wheelchair-referenced opposition score, and (ii) task-conditioned directional manipulability. We evaluate JOIN on a Kinova Gen3 anchor and a Hello Robot Stretch~3 complement on representative same-object and different-object tasks. JOIN accomplished more attempts (19/20) than state-of-the-art methods (14/20) and required markedly less correction by the operator.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents JOIN, a heterogeneous bimanual assistive manipulation system in which a wheelchair-mounted anchor arm (Kinova Gen3) is joined on-demand by a mobile complement arm (Hello Robot Stretch 3). It formulates the conditional bimanual-joining problem as a three-phase decomposition (plan, drive, grasp) and claims that a vision-language model coupled with standard geometric tools—including a wheelchair-referenced opposition score and task-conditioned directional manipulability—supplies sufficient task-level knowledge to solve a representative class of bimanual ADLs. Evaluation on same-object and different-object tasks reports 19/20 success for JOIN versus 14/20 for prior methods, with markedly less operator correction.
Significance. If the central claim holds, the work would demonstrate that VLM outputs plus geometric reasoning can convert into reliable physical actions for bimanual ADLs without learned policies or extensive real-world fine-tuning, advancing on-demand heterogeneous bimanual assistance. The paper explicitly credits the three-phase decomposition, the opposition score, and the directional-manipulability metric as its technical contributions, together with the real-hardware comparison.
major comments (3)
- [Evaluation] Evaluation section (and abstract): the reported 19/20 vs. 14/20 success rates are presented without error bars, without a description of task-selection criteria, without failure-mode analysis, and without any account of how VLM outputs are mapped to executable trajectories. These omissions are load-bearing for the claim that the three-phase decomposition plus the two geometric scores suffice for a representative class of ADLs.
- [Three-phase decomposition] Three-phase decomposition (plan/drive/grasp) and § on contributions: the manuscript asserts that the wheelchair-referenced opposition score and task-conditioned directional manipulability convert VLM outputs into reliable actions, yet supplies neither explicit equations nor pseudocode showing the conversion pipeline or its sensitivity to typical VLM errors in grasp selection or base placement.
- [Evaluation] Evaluation: success counts include operator corrections, so the 19/20 figure does not isolate the performance of the non-learned pipeline. This directly weakens the evidence that the proposed geometric tools alone handle novel or unseen ADLs without additional learned components.
minor comments (2)
- [Contributions] Notation for the opposition score and directional manipulability could be introduced with a single consolidated table or figure to improve readability.
- [Abstract] The abstract states 'representative same-object and different-object tasks' but does not list the exact tasks; adding an enumerated list would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. We address each major comment point by point below, agreeing where revisions are warranted to strengthen the manuscript.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section (and abstract): the reported 19/20 vs. 14/20 success rates are presented without error bars, without a description of task-selection criteria, without failure-mode analysis, and without any account of how VLM outputs are mapped to executable trajectories. These omissions are load-bearing for the claim that the three-phase decomposition plus the two geometric scores suffice for a representative class of ADLs.
Authors: We agree these details are necessary to substantiate the claims. In revision we will add error bars to the reported success rates, explicitly describe the criteria used to select the representative ADLs, include a dedicated failure-mode analysis, and provide a step-by-step account of how VLM outputs are converted into trajectories via the opposition score and directional manipulability within the three-phase decomposition. revision: yes
-
Referee: [Three-phase decomposition] Three-phase decomposition (plan/drive/grasp) and § on contributions: the manuscript asserts that the wheelchair-referenced opposition score and task-conditioned directional manipulability convert VLM outputs into reliable actions, yet supplies neither explicit equations nor pseudocode showing the conversion pipeline or its sensitivity to typical VLM errors in grasp selection or base placement.
Authors: The current manuscript describes the decomposition and geometric scores at a high level in the contributions and method sections. To address the request for rigor, we will insert explicit equations for both the opposition score and the directional manipulability metric, plus pseudocode for the full plan-drive-grasp pipeline. We will also add a short analysis of robustness to common VLM errors in grasp selection and base placement. revision: yes
-
Referee: [Evaluation] Evaluation: success counts include operator corrections, so the 19/20 figure does not isolate the performance of the non-learned pipeline. This directly weakens the evidence that the proposed geometric tools alone handle novel or unseen ADLs without additional learned components.
Authors: We acknowledge that the reported 19/20 success rate incorporates cases requiring operator corrections, consistent with the abstract statement that JOIN required markedly less correction. In revision we will clarify this point and add a breakdown of fully autonomous successes versus those needing intervention, thereby better isolating the contribution of the non-learned geometric pipeline. revision: yes
Circularity Check
No significant circularity; claims rest on empirical evaluation of proposed components
full rationale
The paper proposes a three-phase decomposition for bimanual joining and introduces two geometric scores (wheelchair-referenced opposition and task-conditioned directional manipulability) to convert VLM outputs into actions. These are presented as engineering contributions evaluated on 20 attempts across same-object and different-object tasks, with measured success rates (19/20) compared to baselines. No equations, fitted parameters renamed as predictions, or self-citation chains appear in the abstract or described derivation; the central sufficiency claim is supported by direct experimental outcomes rather than reducing to inputs by construction. The evaluation includes operator corrections but remains an external measurement, not a definitional tautology.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Carion, N., Gustafson, L., Hu, Y.T., Debnath, S., Hu, R., Suris, D., Ryali, C., Alwala, K.V., Khedr, H., Huang, A., Lei, J., Ma, T., Guo, B., Kalla, A., Marks, M., Greer, J., Wang, M., Sun, P., Rädle, R., Afouras, T., Mavroudi, E., Xu, K., Wu, T.H., Zhou, Y., Momeni, L., Hazra, R., Ding, S., Vaze, S., Porcher, F., Li, F., Li, S., Kamath, A., Cheng, H.K., ...
Pith/arXiv arXiv 2025
-
[2]
IEEE Robotics and Automation Letters (2026)
Chen, J., Jiang, Y., Huang, A., Li, Y., Pan, W.: VLM-SFD: VLM-assisted siamese flow diffusion framework for dual-arm cooperative manipulation. IEEE Robotics and Automation Letters (2026)
2026
-
[3]
arXiv preprint arXiv:2410.22662 (2025)
Chen, J., Yu, C., Zhou, X., Xu, T., Mu, Y., Hu, M., Shao, W., Wang, Y., Li, G., Shao, L.: EMOS: Embodiment-aware heterogeneous multi-robot operating system with LLM agents. arXiv preprint arXiv:2410.22662 (2025)
arXiv 2025
-
[4]
The International Journal of Robotics Research 7(5), 13–21 (1988)
Chiu, S.L.: Task compatibility of manipulator postures. The International Journal of Robotics Research 7(5), 13–21 (1988)
1988
-
[5]
IEEE Transactions on Robotics 39(5), 3929–3945 (2023)
Fang, H.S., Wang, C., Fang, H., Gou, M., Liu, J., Yan, H., Liu, W., Xie, Y., Lu, C.: AnyGrasp: Robust and efficient grasp perception in spatial and temporal domains. IEEE Transactions on Robotics 39(5), 3929–3945 (2023)
2023
-
[6]
In: 2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
Gandhi, R., Casado, F.E., Demiris, Y.: Toward shared control for mobile bimanual manipulation on a robotic wheelchair. In: 2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). pp. 851–856 (2025)
2025
-
[7]
Model Card (2026), https://deepmind
Google DeepMind: Gemini robotics-er 1.6. Model Card (2026), https://deepmind. google
2026
-
[8]
In: arXiv preprint arXiv:2407.00278 (2024)
Grotz, M., Shridhar, M., Asfour, T., Fox, D.: PerAct2: Benchmarking and learn- ing for robotic bimanual manipulation tasks. In: arXiv preprint arXiv:2407.00278 (2024)
arXiv 2024
-
[9]
Hahne, F., Prasad, V., Chalvatzaki, G., Peters, J., Kshirsagar, A.: Task-aware bi- manualaffordancepredictionviaVLM-guidedsemantic-geometricreasoning.arXiv preprint arXiv:2604.08726 (2026)
Pith/arXiv arXiv 2026
-
[10]
arXiv preprint arXiv:2507.00500 (2025)
Heidinger, M., Jauhri, S., Prasad, V., Chalvatzaki, G.: 2HandedAfforder: Learn- ing precise actionable bimanual affordances from human videos. arXiv preprint arXiv:2507.00500 (2025)
arXiv 2025
-
[11]
arXiv preprint arXiv:2511.04860 (2025)
Im, H., Jeong, E., Fu, J., Kolobov, A., Lee, Y.: TwinVLA: Data-efficient bimanual manipulation with twin single-arm vision-language-action models. arXiv preprint arXiv:2511.04860 (2025)
arXiv 2025
-
[12]
IEEE Robotics and Automation Letters 7(3), 8399– 8406 (2022)
Jauhri, S., Peters, J., Chalvatzaki, G.: Robot learning of mobile manipulation with reachability behavior priors. IEEE Robotics and Automation Letters 7(3), 8399– 8406 (2022)
2022
-
[13]
Jenamani, R.K., Padmanabha, A., Nanavati, A., Cakmak, M., Erickson, Z., Bhattacharjee, T.: Enhancing independence with physical caregiving robots. p. 1973–1975. HRI ’25, IEEE Press (2025)
1973
-
[14]
arXiv preprint arXiv:2407.07561 (2024)
Jenamani, R.K., Sundaresan, P., Sakr, M., Bhattacharjee, T., Sadigh, D.: FLAIR: Feeding via long-horizon AcquIsition of realistic dishes. arXiv preprint arXiv:2407.07561 (2024)
arXiv 2024
-
[15]
arXiv preprint arXiv:2511.02215 (2025) 16 Moore et al
Jiang, J.J., Wu, X.M., He, Y.X., Zeng, L.A., Wei, Y.L., Zhang, D., Zheng, W.S.: Rethinking bimanual robotic manipulation: Learning with decoupled interaction framework. arXiv preprint arXiv:2511.02215 (2025) 16 Moore et al
arXiv 2025
-
[16]
In: Proceedings of the 12th ACM International Conference on PEr- vasive Technologies Related to Assistive Environments
Keleştemur, T., Yokoyama, N., Truong, J., Allaban, A.A., Padir, T.: System ar- chitecture for autonomous mobile manipulation of everyday objects in domestic environments. In: Proceedings of the 12th ACM International Conference on PEr- vasive Technologies Related to Assistive Environments. pp. 264–269 (2019)
2019
-
[17]
In: IEEE International Conference on Robotics and Automation (ICRA) (2025)
Liu, P., Guo, Z., Warke, M., Chintala, S., Paxton, C., Shafiullah, N.M.M., Pinto, L.: DynaMem: Online dynamic spatio-semantic memory for open world mobile manipulation. In: IEEE International Conference on Robotics and Automation (ICRA) (2025)
2025
-
[18]
In: Robotics: Science and Systems (RSS) (2024)
Liu, P., Orru, Y., Vakil, J., Paxton, C., Shafiullah, N.M.M., Pinto, L.: OK- Robot: What really matters in integrating open-knowledge models for robotics. In: Robotics: Science and Systems (RSS) (2024)
2024
-
[19]
In: IEEE International Conference on Robotics and Automation (ICRA) (2024)
Mandi, Z., Jain, S., Song, S.: RoCo: Dialectic multi-robot collaboration with large language models. In: IEEE International Conference on Robotics and Automation (ICRA) (2024)
2024
-
[20]
Annual Review of Control, Robotics, and Autonomous Systems (2024)
Nanavati, A., Ranganeni, V., Cakmak, M.: Physically assistive robots: A system- atic review of mobile and manipulator robots that physically assist people with disabilities. Annual Review of Control, Robotics, and Autonomous Systems (2024)
2024
-
[21]
In: ACM/IEEE International Conference on Human-Robot Interaction (HRI) (2024)
Padmanabha, A., Gupta, J., Chen, C., Yang, J., Nguyen, V., Weber, D.J., Majidi, C., Erickson, Z.: Independence in the home: A wearable interface for a person with quadriplegia to teleoperate a mobile manipulator. In: ACM/IEEE International Conference on Human-Robot Interaction (HRI) (2024)
2024
-
[22]
In: 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC)
Padır, T.: Towards personalized smart wheelchairs: Lessons learned from discovery interviews. In: 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). pp. 5016–5019 (2015)
2015
-
[23]
arXiv preprint arXiv:2603.21679 (2026)
Shen, Y., Jiang, F., He, Z., Li, X., Liu, Y., Li, Z., Wu, R., Dong, H.: BiPreManip: Learning affordance-based bimanual preparatory manipulation through anticipa- tory collaboration. arXiv preprint arXiv:2603.21679 (2026)
arXiv 2026
-
[24]
arXiv preprint arXiv:2502.19417 (2025)
Shi, L.X., Ichter, B., Equi, M., Ke, L., Pertsch, K., Vuong, Q., Tanner, J., Walling, A., Wang, H., Fusai, N., Li-Bell, A., Driess, D., Groom, L., Levine, S., Finn, C.: Hi robot: Open-ended instruction following with hierarchical vision-language-action models. arXiv preprint arXiv:2502.19417 (2025)
Pith/arXiv arXiv 2025
-
[25]
Vahrenkamp, N., Asfour, T., Dillmann, R.: Robot placement based on reachability inversion.In:IEEEInternationalConferenceonRoboticsandAutomation(ICRA). pp. 1970–1975 (2013)
1970
-
[26]
In: Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (2012)
Wang, H., Grindle, G.G., Candiotti, J., Chung, C., Shino, M., Houston, E., Cooper, R.A.: The personal mobility and manipulation appliance (PerMMA): A robotic wheelchair with advanced mobility and manipulation. In: Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (2012)
2012
-
[27]
Ye, R., Chen, S., Yan, Y., Yang, J., Ge, C., Barreiros, J., Tsui, K., Silve, T., Bhattacharjee, T.: CART-MPC: Coordinating assistive devices for robot-assisted transferringwithmulti-agentmodelpredictivecontrol.In:IEEEInternationalCon- ference on Robotics and Automation (ICRA) (2025)
2025
-
[28]
The International Journal of Robotics Research 4(2), 3–9 (1985)
Yoshikawa, T.: Manipulability of robotic mechanisms. The International Journal of Robotics Research 4(2), 3–9 (1985)
1985
-
[29]
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Zacharias, F., Borst, C., Hirzinger, G.: Capturing robot workspace structure: Rep- resenting robot capabilities. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 3229–3236 (2007)
2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.