Localization from Pseudoranges: Quadrics and Duality
Pith reviewed 2026-06-29 09:34 UTC · model grok-4.3
The pith
Solutions to the pseudorange localization problem form a quadric dual to the one containing the satellite positions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
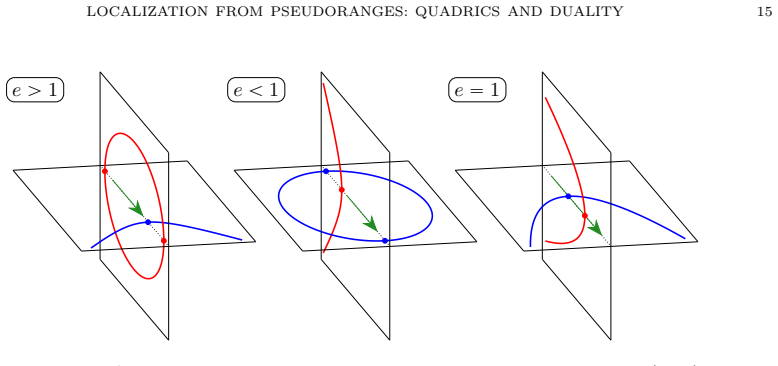
The solutions form a quadric, which may degenerate in various ways. The satellite positions also lie on a quadric, and these two quadrics exhibit a remarkable duality: They live on perpendicular affine spaces but share the same axis of symmetry. Moreover, the vertices of one quadric are the foci of the other and vice versa.
What carries the argument
the pair of dual quadrics (one for receiver solutions, one for satellite positions) related by perpendicular affine spaces, a shared symmetry axis, and the interchange of vertices and foci
If this is right
- The full set of possible locations is described explicitly by a quadric equation, so any additional constraints can be imposed by intersecting the quadric with the constraint surface.
- The same quadric-duality description applies to any pseudorange-multilateration task with unknown emission time.
- The duality supplies a geometric test for consistency of measured pseudoranges before attempting numerical solution.
Where Pith is reading between the lines
- Algorithms that solve for the quadric coefficients directly may replace iterative numerical search in underdetermined localization.
- The vertex-foci interchange suggests a possible link to classical confocal quadric geometry that could be exploited for closed-form solutions.
- The construction may extend to higher-dimensional or non-Euclidean ambient spaces if the pseudorange model is adapted accordingly.
Load-bearing premise
The pseudorange model is exactly distance plus a single unknown constant time offset with no additional biases, and the ambient space is Euclidean affine 3-space.
What would settle it
For any choice of satellite positions and pseudoranges, compute the predicted solution quadric and check whether an independently measured receiver location lies on that quadric.
Figures



read the original abstract
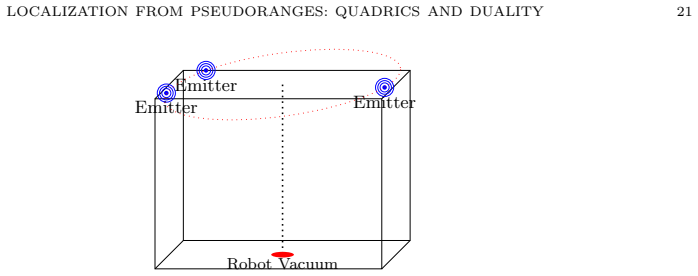
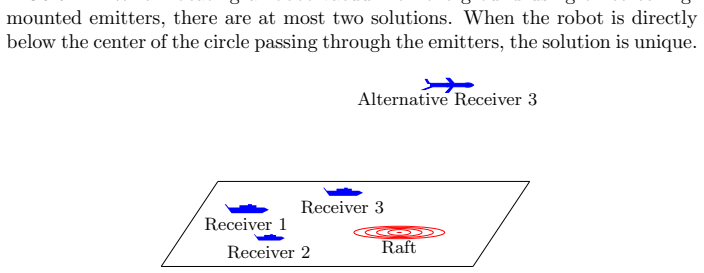
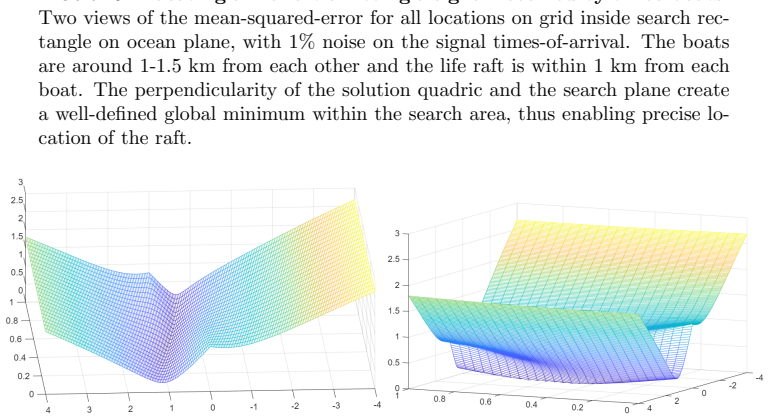
This paper gives a complete description of the solutions of the global positioning problem, emphasizing the under-determined case. We show that the solutions form a quadric, which may degenerate in various ways. Perhaps more surprisingly, the satellite positions also lie on a quadric, and these two quadrics exhibit a remarkable duality: They live on perpendicular affine spaces but share the same axis of symmetry. Moreover, the vertices of one quadric are the foci of the other and vice versa. The results of this paper are not only applicable to the global positioning problem, but to a wider class of problems known as pseudorange-multilateration. This includes a range of real-world localization problems where a signal is emitted at an unknown emission time, and received by sensors at known positions. In particular, the paper can be useful for solving an under-determined multilateration problem in the presence of additional constraints. We illustrate this with two examples: locating a cleaning robot on the ground and locating a raft on the ocean.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to give a complete algebraic description of solutions to the pseudorange multilateration problem (including the under-determined case) in Euclidean 3-space. The locus of possible receiver positions is asserted to be a (possibly degenerate) quadric hypersurface; the known satellite positions lie on a dual quadric; and the two quadrics are related by a duality in which they lie in perpendicular affine spaces, share a common axis of symmetry, and exhibit vertex/focus reciprocity. The framework is illustrated with two constrained localization examples (ground robot, ocean raft).
Significance. If the central algebraic claims hold, the work supplies a parameter-free geometric characterization of the solution set directly from the Euclidean distance-plus-offset model, without fitted quantities or self-referential reductions. This could aid exact solution of under-determined pseudorange problems when additional constraints are imposed. The reported duality (perpendicular supports, shared axis, vertex-focus swap) is a non-obvious structural observation that may have wider use in algebraic approaches to multilateration.
major comments (2)
- [Abstract and §3 (derivation of the locus)] The manuscript asserts that the solution set is a quadric and that the satellites lie on a dual quadric, but the explicit quadratic form (after elimination of the unknown offset t) is not displayed with coefficients in terms of the s_i and r_i. Without this equation, the subsequent claims of degeneracy types and the duality cannot be verified as load-bearing consequences of the model.
- [Abstract and §4 (duality)] The duality statement that the two quadrics "live on perpendicular affine spaces" and "share the same axis of symmetry" is central, yet no coordinate-free or coordinate-based definition of these supporting spaces or the axis is supplied, nor is a proof that the spaces are perpendicular given. This leaves the reciprocity of vertices and foci unanchored.
minor comments (2)
- [Examples section] The two illustrative examples (cleaning robot, raft) are mentioned only in the abstract; the manuscript should include the explicit additional constraints used and the resulting reduced solution sets.
- [Notation and figures] Notation for the affine spaces, axis, and foci/vertices should be introduced with a short table or diagram to avoid ambiguity when the quadrics degenerate.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for identifying points where additional explicit detail would strengthen the algebraic presentation. We address each major comment below and will revise the manuscript to incorporate the requested clarifications.
read point-by-point responses
-
Referee: [Abstract and §3 (derivation of the locus)] The manuscript asserts that the solution set is a quadric and that the satellites lie on a dual quadric, but the explicit quadratic form (after elimination of the unknown offset t) is not displayed with coefficients in terms of the s_i and r_i. Without this equation, the subsequent claims of degeneracy types and the duality cannot be verified as load-bearing consequences of the model.
Authors: Section 3 derives the locus by eliminating the unknown emission time t from the system of pseudorange equations, yielding a quadratic equation in the receiver coordinates. While the elimination steps are shown, the fully expanded quadratic form with coefficients written explicitly in terms of the satellite positions s_i and pseudoranges r_i is not displayed. We agree that including this expanded equation will allow direct verification of the degeneracy types and will serve as the foundation for the duality claims. We will add the explicit quadratic form to the revised manuscript. revision: yes
-
Referee: [Abstract and §4 (duality)] The duality statement that the two quadrics "live on perpendicular affine spaces" and "share the same axis of symmetry" is central, yet no coordinate-free or coordinate-based definition of these supporting spaces or the axis is supplied, nor is a proof that the spaces are perpendicular given. This leaves the reciprocity of vertices and foci unanchored.
Authors: Section 4 defines the two quadrics through the coordinate system that emerges after elimination of t, in which the receiver coordinates and satellite coordinates occupy complementary 3-dimensional affine spaces whose orthogonality follows from the structure of the resulting quadratic forms; the common axis of symmetry is the line joining the two vertices. Nevertheless, we acknowledge that a standalone coordinate-free description of the supporting spaces and axis, together with an explicit verification of perpendicularity, is not provided. We will insert these definitions and the short proof of perpendicularity in the revised version so that the vertex-focus reciprocity is fully anchored. revision: yes
Circularity Check
No circularity; derivation is direct algebraic consequence of pseudorange model
full rationale
The paper's central results—that solution loci form a quadric (possibly degenerate), that satellite positions lie on a dual quadric, and that the two exhibit perpendicular supporting spaces, shared axis, and vertex/focus reciprocity—are obtained by algebraic manipulation of the defining equations ||x - s_i|| = r_i + t. Differencing squared equations cancels the quadratic and linear terms in the unknown offset t, yielding a system whose solution set is a quadric hypersurface by construction of the Euclidean distance model. No parameters are fitted, no self-citations are load-bearing, no ansatz is smuggled, and no uniqueness theorem from prior author work is invoked. The derivation is therefore self-contained against the stated model assumptions and standard quadric algebra.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Ambient space is Euclidean affine 3-space with standard quadratic distance function
- domain assumption Pseudorange equals Euclidean distance plus single unknown constant offset
Reference graph
Works this paper leans on
-
[1]
Juan R. Aguilar,Gunshot location systems the transfer of the sniper detection technology from military to civilian applications, in:2013 47th International Carnahan Conference on Security Technology (ICCST), pp. 1–6, 2013
2013
-
[2]
Sandra Arlinghaus,Practical handbook of digital mapping terms and concepts, CRC Press, 1994
1994
-
[3]
URL:https://www.sciencedirect.com/science/article/pii/S0967066114002500
Pedro Batista,Long baseline navigation with clock offset estimation and discrete-time measurements, Control Engineering Practice35(2015), 43–53. URL:https://www.sciencedirect.com/science/article/pii/S0967066114002500
2015
-
[4]
Applied Math.160(2024)
Mireille Boutin, Gregor Kemper,Global Positioning: the Uniqueness Question and a New Solution Method, Adv. Applied Math.160(2024)
2024
-
[5]
Mireille Boutin, Gregor Kemper,New Developments in Global Positioning, Notices of the AMS72(2025), 818–825
2025
-
[6]
3–12, Springer, 2026
Mireille Boutin, Rob Eggermont, Gregor Kemper,Global Positioning on Earth, in: Frank Nielsen, Fr´ ed´ eric Barbaresco, eds.,Geometric Science of Information, pp. 3–12, Springer, 2026
2026
-
[7]
Hui Chen, Henk Wymeersch,Phone signals can help you find your way in cities even without GPS, (2022)
2022
-
[8]
233–245, 2005
Yu-Chung Cheng, Yatin Chawathe, Anthony LaMarca, John Krumm,Accuracy characterization for metropolitan-scale Wi-Fi localization, in:Proceedings of the 3rd international conference on Mobile sys- tems, applications, and services, pp. 233–245, 2005. 24 MIREILLE BOUTIN AND GREGOR KEMPER
2005
-
[9]
Demei Gao Dong,Design and development of Intelligent Logistics Tracking System based on computer algo- rithm, International Journal for Applied Information Management3(2)(2023), 58–69
2023
-
[10]
Camillo Gentile, Nayef Alsindi, Ronald Raulefs, Carole Teolis,Geolocation techniques: principles and appli- cations, Springer Science & Business Media, 2012
2012
-
[11]
Jeroen CJ Koelemeij, Han Dun, Cherif EV Diouf, Erik F Dierikx, Gerard JM Janssen, Christian CJM Tiberius,A hybrid optical–wireless network for decimetre-level terrestrial positioning, Nature611(7936) (2022), 473–478
2022
-
[12]
Richard B Langley, et al.,Dilution of precision, GPS world10(5)(1999), 52–59
1999
-
[13]
C. K. M. Lee, C. M. Ip, Taezoon Park, S.Y. Chung,A Bluetooth Location-based Indoor Positioning System for Asset Tracking in Warehouse, in:2019 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), pp. 1408–1412, 2019
2019
-
[14]
Lee,A Novel Procedure for Assessing the Accuracy of Hyperbolic Multilateration Systems, IEEE Transactions on Aerospace and Electronic SystemsAES-11(1)(1975), 2–15
Harry B. Lee,A Novel Procedure for Assessing the Accuracy of Hyperbolic Multilateration Systems, IEEE Transactions on Aerospace and Electronic SystemsAES-11(1)(1975), 2–15
1975
-
[15]
Ardeshir Mohamadi, Hossein Nahavandchi, Amir Khodabandeh,Phase-Only positioning in urban environ- ments: assessing its potential for mass-market GNSS receivers, Journal of Spatial Science70(3)(2025), 557–569
2025
-
[16]
1–13, Springer, 2000
Kaveh Pahlavan, Xinrong Li, Mika Ylianttila, Ranvir Chana, Matti Latva-aho,An overview of wireless indoor geolocation techniques and systems, in:IFIP International Conference on Mobile and Wireless Communi- cation Networks, pp. 1–13, Springer, 2000
2000
-
[17]
Guenther Retscher, Eva Moser, Dennis Vredeveld, Dirk Heberling, Joerg Pamp,Performance and accuracy test of a WiFi indoor positioning system, GEOWISSENSCHAFTLICHE MITTEILUNGEN (2007), 69
2007
-
[18]
22–24, Kuala Lumpur, Malaysia, 2011
AHM Shamsuzzoha, Petri T Helo,Real-time tracking and tracing system: Potentials for the logistics network, in:Proceedings of the 2011 international conference on industrial engineering and operations management, pp. 22–24, Kuala Lumpur, Malaysia, 2011
2011
-
[19]
AHM Shamsuzzoha, Mikael Ehrs, Richard Addo-Tenkorang, Duy Nguyen, Petri T Helo,Performance evalua- tion of tracking and tracing for logistics operations, International Journal of Shipping and Transport Logistics 5(1)(2013), 31–54
2013
-
[20]
Vickery,Acoustic positioning systems
K. Vickery,Acoustic positioning systems. A practical overview of current systems, in:Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles (Cat. No.98CH36290), pp. 5–17, 1998
1998
-
[21]
Tongwei Zhang, Guangjie Han, Lei Yan, Baohua Liu, Lei Shu,Optimal Design of Beacon Array for Long Baseline Positioning System Used in Manned Deep-Sea Submersibles, IEEE Access7(2019), 140411–140420. Department of Mathematics and Computer Science, Eindhoven University of Technology, 5600 MB Eindhoven, The Netherlands Email address:m.boutin@tue.nl Technical...
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.