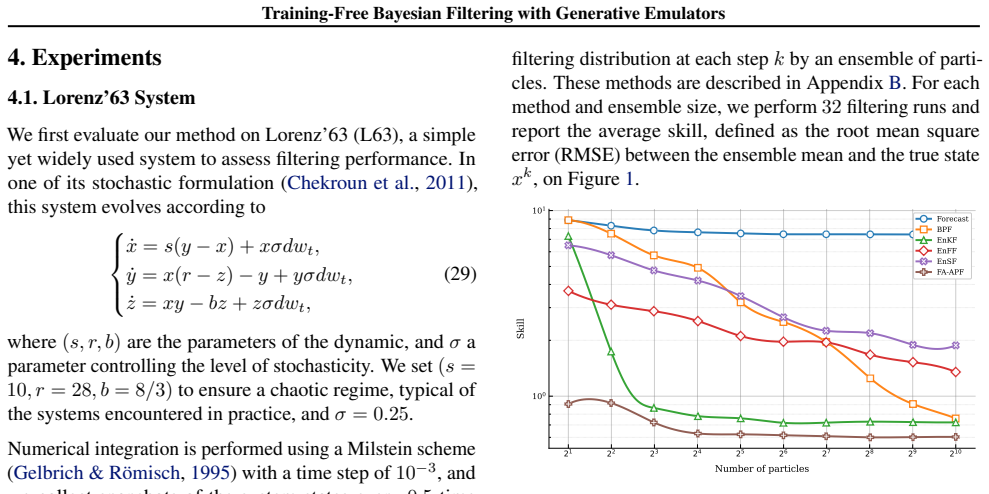
Training-Free Bayesian Filtering with Generative Emulators
Pith reviewed 2026-05-20 07:00 UTC · model grok-4.3
The pith
Pre-trained diffusion emulators enable training-free optimal particle filters for high-dimensional dynamical systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Diffusion-based emulators of dynamical systems can be used to implement, without additional training, an optimal variant of particle filters that has remained largely unexplored due to implementation challenges with classical numerical solvers.
What carries the argument
Diffusion-based generative emulator of the system's transition dynamics, used to draw direct samples of next states inside each iteration of the particle filter.
If this is right
- Scales particle filtering successfully to high-dimensional nonlinear systems.
- Works on chaotic dynamical systems including atmospheric dynamics.
- Avoids the need for corrective training or fine-tuning of the emulator.
- Retains theoretical exactness for nonlinear dynamics and observations.
Where Pith is reading between the lines
- The same plug-in approach might work with other classes of generative models that can sample transitions accurately.
- It could support real-time filtering tasks where repeated numerical integration is too slow.
- Accuracy of long-horizon predictions would depend on how well the emulator preserves the system's invariant measures.
Load-bearing premise
The pre-trained diffusion emulator must accurately represent the true transition dynamics of the system so that sampling from it produces an unbiased posterior.
What would settle it
Run the emulator-based filter on a low-dimensional system with an exactly computable posterior and check whether the estimated state distributions match the ground truth within sampling error.
Figures







read the original abstract
Bayesian filtering is a well-known problem that aims to estimate plausible states of a dynamical system from observations. Among existing approaches to solve this problem, particle filters are theoretically exact for non-linear dynamics and observations, but suffer from poor scalability in high dimensions. In this work, we show that diffusion-based emulators of dynamical systems can be used to implement, without additional training, an optimal variant of particle filters that has remained largely unexplored due to implementation challenges with classical numerical solvers. Experiments on nonlinear chaotic systems, including atmospheric dynamics, demonstrate that the proposed approach successfully scales particle filtering to high-dimensional settings.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that pre-trained diffusion-based generative emulators of dynamical systems can be used without further training to implement an optimal particle filter for Bayesian filtering. This is positioned as overcoming implementation challenges of classical numerical solvers for optimal proposals, with experiments demonstrating successful scaling to high-dimensional nonlinear chaotic systems including atmospheric dynamics.
Significance. If the central claim holds with the required exactness, the work would be significant for enabling scalable, theoretically grounded filtering in high-dimensional chaotic systems such as those in data assimilation and geosciences. The training-free reuse of existing emulators is a clear strength, as is the focus on optimal proposals that have been underexplored due to solver difficulties.
major comments (2)
- [Experiments] Experiments section: the reported success on nonlinear chaotic systems and atmospheric dynamics provides no quantitative metrics (e.g., RMSE, ESS, or log-likelihood), error bars, or direct comparisons against a ground-truth simulator, preventing verification that the emulator sampling produces an unbiased posterior.
- [§3 (Method)] §3 (Method): the derivation of the training-free optimal particle filter assumes the diffusion emulator exactly reproduces the transition kernel p(x_{t+1}|x_t) or optimal proposal so that importance weights remain valid; however, the variational training objective and finite-step reverse SDE introduce residual approximation error that can be amplified by Lyapunov instability in chaotic regimes, and no bias analysis or corrective bound is supplied.
minor comments (1)
- [Abstract] Abstract: the phrase 'successfully scales particle filtering' would be strengthened by naming the specific systems and at least one performance measure.
Simulated Author's Rebuttal
We thank the referee for their constructive and insightful comments. We address each major comment point by point below, indicating where revisions will be incorporated.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the reported success on nonlinear chaotic systems and atmospheric dynamics provides no quantitative metrics (e.g., RMSE, ESS, or log-likelihood), error bars, or direct comparisons against a ground-truth simulator, preventing verification that the emulator sampling produces an unbiased posterior.
Authors: We agree that the experiments would be strengthened by quantitative metrics and comparisons. In the revised manuscript we will report RMSE, effective sample size (ESS), and log-likelihood values with error bars from repeated runs. We will also add direct comparisons against particle filtering performed with the ground-truth simulator to assess posterior bias. revision: yes
-
Referee: [§3 (Method)] §3 (Method): the derivation of the training-free optimal particle filter assumes the diffusion emulator exactly reproduces the transition kernel p(x_{t+1}|x_t) or optimal proposal so that importance weights remain valid; however, the variational training objective and finite-step reverse SDE introduce residual approximation error that can be amplified by Lyapunov instability in chaotic regimes, and no bias analysis or corrective bound is supplied.
Authors: The referee correctly notes that our derivation assumes the emulator provides a sufficiently accurate approximation to the transition kernel. We will revise §3 to explicitly state this assumption, discuss the sources of residual error from variational training and finite-step discretization, and analyze how such errors may be amplified under chaotic dynamics. A preliminary bias discussion and weight-validity bound will be added; however, a fully rigorous corrective bound that accounts for arbitrary Lyapunov instability remains an open theoretical question. revision: partial
- A complete, rigorous bias bound that holds uniformly under Lyapunov instability in chaotic regimes.
Circularity Check
No significant circularity; relies on independent pre-trained emulators
full rationale
The derivation chain uses pre-trained diffusion emulators as an external component to implement particle filtering without additional training. No steps reduce by construction to fitted parameters, self-definitions, or load-bearing self-citations; the central claim depends on the separate accuracy of those emulators rather than deriving the posterior from the paper's own outputs. This is a standard non-circular finding for a method that composes existing generative models with classical filtering.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The diffusion-based emulator accurately captures the system's transition dynamics without bias for the purposes of particle filtering.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
diffusion-based emulators ... sample from p(x_{k+1}|x_k, y_{k+1}) via MMPS score decomposition (Eq. 15,20)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
URL https://www.sciencedirect.com/ science/article/pii/S0045782524007023
doi: https://doi.org/10.1016/j.cma.2024.117447. URL https://www.sciencedirect.com/ science/article/pii/S0045782524007023. Barros, S., Dent, D., Isaksen, L., Robinson, G., Mozdzyn- ski, G., and Wollenweber, F. The IFS model: A parallel production weather code.Parallel Com- puting, 21(10):1621–1638, 1995. ISSN 0167-8191. doi: https://doi.org/10.1016/0167-81...
-
[2]
ed edition, 1995. ISBN 0471007102. URL http://gso.gbv.de/DB=2.1/CMD?ACT= SRCHA&SRT=YOP&IKT=1016&TRM=ppn+ 164761632&sourceid=fbw_bibsonomy. Brousseau, P., V ogt, V ., Arbogast, E., Martet, M., Thomas, G., and Berre, L. The operational 3DEnVar data assim- ilation scheme for the M ´et´eo-France convective scale model AROME-France.EGUsphere [preprint], 2025. ...
-
[3]
doi: https://doi.org/10.1016/j.physd.2011.06
-
[4]
Chen, S., Jia, Y ., Qu, Q., Sun, H., and Fessler, J
URL https://www.sciencedirect.com/ science/article/pii/S016727891100145X. Chen, S., Jia, Y ., Qu, Q., Sun, H., and Fessler, J. A. FlowDAS: A Stochastic Interpolant-based Framework for Data Assimilation. InThe Thirty-ninth Annual Conference on Neural Information Processing Systems,
-
[5]
Chen, Y ., Goldstein, M., Hua, M., Albergo, M
URL https://openreview.net/forum? id=1nWqhiulqD. Chen, Y ., Goldstein, M., Hua, M., Albergo, M. S., Boffi, N. M., and Vanden-Eijnden, E. Probabilistic Forecast- ing with Stochastic Interpolants and F¨ollmer Processes. In Salakhutdinov, R., Kolter, Z., Heller, K., Weller, A., Oliver, N., Scarlett, J., and Berkenkamp, F. (eds.),Pro- ceedings of the 41st Int...
-
[6]
9 Training-Free Bayesian Filtering with Generative Emulators Chorin, A
URL https://proceedings.mlr.press/ v235/chen24n.html. 9 Training-Free Bayesian Filtering with Generative Emulators Chorin, A. J. Numerical Solution of the Navier-Stokes Equations.Mathematics of Computation, 22(104):745– 762, 1968. ISSN 00255718, 10886842. URL http: //www.jstor.org/stable/2004575. Chung, H., Kim, J., Mccann, M. T., Klasky, M. L., and Ye, J...
-
[7]
Huang, L., Gianinazzi, L., Yu, Y ., Dueben, P
Curran Associates, Inc., 2020. Huang, L., Gianinazzi, L., Yu, Y ., Dueben, P. D., and Hoe- fler, T. DiffDA: a Diffusion model for weather-scale Data Assimilation. InProceedings of the 41st International Conference on Machine Learning, ICML’24. JMLR.org, 2024. Hunt, B. R., Kostelich, E. J., and Szunyogh, I. Efficient data assimilation for spatiotemporal ch...
-
[8]
URL https://www.climatechange.ai/ papers/iclr2025/36. Le Dimet, F.-X. and Talagrand, O. Variational algorithms for analysis and assimilation of meteorological observa- tions: theoretical aspects.Tellus A, 38A(2):97–110, 1986. doi: https://doi.org/10.1111/j.1600-0870.1986.tb00459.x. URL https://onlinelibrary.wiley.com/ doi/abs/10.1111/j.1600-0870.1986. tb0...
-
[9]
URL https://proceedings.mlr.press/ v202/lemos23a.html. Leutbecher, M. Ensemble size: How subopti- mal is less than infinity?Quarterly Journal of the Royal Meteorological Society, 145(S1):107– 128, 2019. doi: https://doi.org/10.1002/qj.3387. URL https://rmets.onlinelibrary.wiley. com/doi/abs/10.1002/qj.3387. Lipman, Y ., Chen, R. T. Q., Ben-Hamu, H., Nicke...
-
[10]
URL https://rmets.onlinelibrary.wiley
doi: https://doi.org/10.1002/qj.49711247414. URL https://rmets.onlinelibrary.wiley. com/doi/abs/10.1002/qj.49711247414. Lorenz, E. N. Deterministic Nonperiodic Flow.Journal of Atmospheric Sciences, 20(2):130 – 141, 1963. doi: 10.1175/1520-0469(1963)020⟨0130:DNF⟩2.0.CO;2. URL https://journals.ametsoc.org/view/ journals/atsc/20/2/1520-0469_1963_ 020_0130_dn...
-
[11]
Rozet, F., Ohana, R., McCabe, M., Louppe, G., Lanusse, F., and Ho, S
URL https://openreview.net/forum? id=7v88Fh6iSM. Rozet, F., Ohana, R., McCabe, M., Louppe, G., Lanusse, F., and Ho, S. Lost in Latent Space: An Empirical Study of Latent Diffusion Models for Physics Emula- tion. InThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025. URL https: //openreview.net/forum?id=xoNrbfbekM. 11 Training...
-
[12]
Sharief, S., Zeghal, J., Barco, G
URL https://www.climatechange.ai/ papers/neurips2025/39. Sharief, S., Zeghal, J., Barco, G. M., Lemos, P., Heza- veh, Y ., and Perreault-Levasseur, L. MIRA: A Score for Conditional Distribution Accuracy and Model Compari- son, 2026. URL https://arxiv.org/abs/2605. 02014. Si, P. and Chen, P. Latent-EnSF: A Latent Ensemble Score Filter for High-Dimensional ...
work page 2026
-
[13]
URL https://openreview.net/forum? id=urcEYsZOBz. Slivinski, L. and Snyder, C. Exploring Practical Estimates of the Ensemble Size Necessary for Particle Filters. Monthly Weather Review, 144(3):861 – 875, 2016. doi: 10.1175/MWR-D-14-00303.1. URL https: //journals.ametsoc.org/view/journals/ mwre/144/3/mwr-d-14-00303.1.xml. Snyder, C., Bengtsson, T., Bickel, ...
-
[14]
URL https: //journals.ametsoc.org/view/journals/ mwre/136/12/2008mwr2529.1.xml
doi: 10.1175/2008MWR2529.1. URL https: //journals.ametsoc.org/view/journals/ mwre/136/12/2008mwr2529.1.xml. Snyder, C., Bengtsson, T., and Morzfeld, M. Performance Bounds for Particle Filters Using the Optimal Proposal. Monthly Weather Review, 143(11):4750 – 4761, 2015. doi: 10.1175/MWR-D-15-0144.1. URL https: //journals.ametsoc.org/view/journals/ mwre/14...
-
[15]
Transue, T., Chen, B., Takao, S., and Wang, B
URL https://proceedings.mlr.press/ v70/tompson17a.html. Transue, T., Chen, B., Takao, S., and Wang, B. Flow Match- ing for Efficient and Scalable Data Assimilation, 2025. URLhttps://arxiv.org/abs/2508.13313. van der V orst, H. A. Bi-CGSTAB: A Fast and Smoothly Converging Variant of Bi-CG for the Solution of Non- symmetric Linear Systems.SIAM Journal on Sc...
-
[16]
Springer, Heidelberg, 2015. ISBN 9783319251370. doi: 10.1007/978-3-319-25138-7. URL https:// centaur.reading.ac.uk/50238/. van Leeuwen, P. J., K ¨unsch, H. R., Nerger, L., Potthast, R., and Reich, S. Particle filters for high-dimensional geoscience applications: A review.Quarterly Jour- nal of the Royal Meteorological Society, 145(723): 2335–2365, 2019. d...
-
[17]
Zheng, H., Chu, W., Wang, A., Kovachki, N
URL https://openreview.net/forum? id=Loek7hfb46P. Zheng, H., Chu, W., Wang, A., Kovachki, N. B., Baptista, R., and Yue, Y . Ensemble Kalman Diffusion Guidance: A Derivative-free Method for Inverse Problems.Transac- tions on Machine Learning Research, 2025. ISSN 2835-
work page 2025
-
[18]
12 Training-Free Bayesian Filtering with Generative Emulators A
URL https://openreview.net/forum? id=XPEEsKneKs. 12 Training-Free Bayesian Filtering with Generative Emulators A. Tweedie’s formulas Theorem A.1.Assuming that pt(xt |x) =N(x t |α tx,Σ t), the first and second moments of pt(x|x t) are linked to the score function∇ xt logp t(xt)used in Equation(11)through E[x|x t] =α −1 t [xt + Σt∇xt logp t(xt)],(33) V[x|x ...
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.