EllipseLIO: Adaptive LiDAR Inertial Odometry with an Ellipsoid Representation
Pith reviewed 2026-05-21 04:02 UTC · model grok-4.3
The pith
EllipseLIO uses an ellipsoid representation to adapt LiDAR inertial odometry to different sensors and environments without tuning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
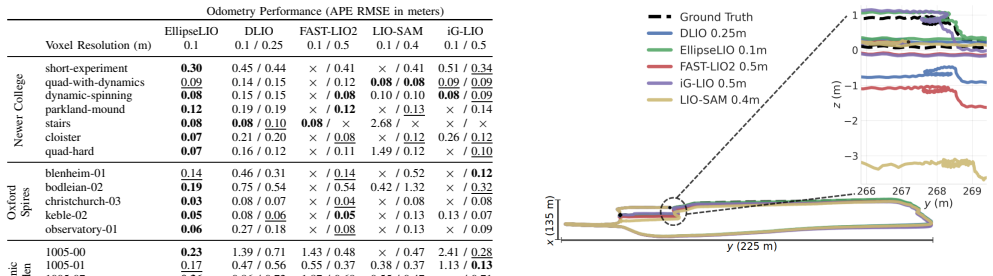
EllipseLIO is a LiDAR inertial odometry approach that uses an ellipsoid representation for adaptive scan filtering and registration. This enables it to generalize between scenarios with different environments and sensors using a consistent configuration. It is shown to be the best performing method overall with a 38 percent lower average odometry error than the second best and the only one that does not diverge in any experiment.
What carries the argument
The ellipsoid representation of LiDAR scan data that enables adaptive filtering and registration without scenario-specific tuning.
If this is right
- Robots can maintain accurate position tracking when switching between different LiDAR sensors.
- The same configuration works across diverse and challenging environments without retuning.
- Average odometry error drops by 38 percent compared to the next best existing approach.
- The method remains stable and does not diverge in scenarios where competing systems fail.
Where Pith is reading between the lines
- Similar adaptation ideas might help other sensor fusion tasks in robotics where environments vary.
- Deploying autonomous systems could become simpler if this kind of automatic adjustment proves reliable in more tests.
- Extensions could include combining this with visual sensors for even greater robustness.
Load-bearing premise
The adaptive methods for LiDAR scan filtering and registration using the ellipsoid representation are sufficient to generalize across all heterogeneous environments and sensors.
What would settle it
Deploying EllipseLIO on a LiDAR sensor and environment combination not included in the original five datasets and checking if the odometry error stays low and the system does not diverge.
Figures





read the original abstract
LiDAR Inertial Odometry (LIO) is a critical component for many mobile robots that need to navigate without relying on external positioning (e.g., GPS). Platforms that operate autonomously in different environments and with heterogeneous LiDAR sensors require a LIO approach that can adapt to these different scenarios without human intervention. Existing LIO approaches can typically provide reliable and accurate odometry in scenarios with similar environments and sensors when suitably tuned. However, many approaches struggle to retain robust odometry across heterogeneous environments and sensors while using a consistent configuration. This paper presents EllipseLIO, a real-time LIO approach that generalises between scenarios by using methods for LiDAR scan filtering and registration that adapt to the sensor capabilities and environment without requiring scenario-specific tuning. Experiments with EllipseLIO and state-of-the-art LIO approaches on five datasets with diverse and challenging scenarios demonstrate that EllipseLIO is the best-performing approach overall. It achieves a 38% lower odometry error on average than the second-best approach and is the only approach that does not diverge in any experiment. An open-source version of EllipseLIO will be available at github.com/v4rl-ucy/ellipselio.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents EllipseLIO, a real-time LiDAR Inertial Odometry (LIO) approach that employs an ellipsoid representation for adaptive LiDAR scan filtering and registration. This design is intended to generalize across heterogeneous environments and sensors without requiring scenario-specific tuning. Experiments across five diverse datasets show EllipseLIO achieving the lowest average odometry error (38% better than the second-best method) and being the only evaluated approach that does not diverge in any sequence.
Significance. If the no-tuning claim and fair baseline comparison hold, the work would offer a practically useful advance for robust LIO on varied platforms. The open-source release supports reproducibility, which strengthens the contribution if the empirical results are shown to be free of implicit per-dataset optimization.
major comments (2)
- [Abstract and §5] Abstract and §5 (Experiments): The central claim of generalization without scenario-specific tuning is load-bearing for the superiority result. The ellipsoid representation necessarily introduces parameters (e.g., fitting tolerances, covariance thresholds, or weighting factors). Clarify whether these were held fixed across all five datasets or selected/validated on the evaluation sequences; if the latter, the 38% error reduction and non-divergence advantage may not be directly comparable to baselines run under fixed configurations.
- [§4 and §5.1] §4 (Method) and §5.1 (Dataset details): Provide explicit values or ranges for all ellipsoid-related hyperparameters and state whether they were identical for every sequence. Without this, the assertion that filtering/registration 'adapt to the sensor capabilities and environment without requiring scenario-specific tuning' cannot be verified against the skeptic concern that implicit per-dataset fitting occurred.
minor comments (2)
- [§5] Add a table or paragraph listing the exact parameter settings used for EllipseLIO and for each baseline to allow direct replication of the reported comparison.
- [Figures in §5] In the trajectory figures, include per-sequence error values or box plots alongside the qualitative plots to make the quantitative 38% average improvement easier to inspect.
Simulated Author's Rebuttal
We thank the referee for the constructive comments regarding the generalization claims and the need for hyperparameter transparency. We address each major comment below and have revised the manuscript accordingly to strengthen the presentation of our results.
read point-by-point responses
-
Referee: [Abstract and §5] Abstract and §5 (Experiments): The central claim of generalization without scenario-specific tuning is load-bearing for the superiority result. The ellipsoid representation necessarily introduces parameters (e.g., fitting tolerances, covariance thresholds, or weighting factors). Clarify whether these were held fixed across all five datasets or selected/validated on the evaluation sequences; if the latter, the 38% error reduction and non-divergence advantage may not be directly comparable to baselines run under fixed configurations.
Authors: All ellipsoid-related parameters were held fixed across the five datasets and all sequences. No selection, validation, or optimization was performed on the evaluation data. The adaptive behavior stems from the ellipsoid fitting and registration procedures, which respond to the incoming scan statistics while using one consistent configuration for all experiments. This matches the fixed-configuration protocol used for the baselines. We have revised the abstract and Section 5 to state this explicitly. revision: yes
-
Referee: [§4 and §5.1] §4 (Method) and §5.1 (Dataset details): Provide explicit values or ranges for all ellipsoid-related hyperparameters and state whether they were identical for every sequence. Without this, the assertion that filtering/registration 'adapt to the sensor capabilities and environment without requiring scenario-specific tuning' cannot be verified against the skeptic concern that implicit per-dataset fitting occurred.
Authors: We agree that explicit listing improves verifiability. The revised Section 4 now contains a table with every ellipsoid-related hyperparameter together with the exact value or range employed. All listed values were identical for every sequence in every dataset. The adaptation therefore occurs through the algorithmic mechanisms rather than through per-dataset parameter adjustment. We have also added a short statement in Section 5.1 confirming the fixed configuration. revision: yes
Circularity Check
No circularity: empirical performance claims rest on dataset comparisons without self-referential derivations or fitted inputs renamed as predictions
full rationale
The paper presents an empirical LIO method using ellipsoid representations for adaptive filtering and registration. No equations, derivations, or parameter-fitting steps are described in the abstract or visible claims that reduce by construction to the reported results. The central assertions (38% error reduction, no divergence) are framed as outcomes of experiments across five datasets rather than algebraic identities or self-cited uniqueness theorems. Self-citations, if present in the full text, are not load-bearing for the performance claims per the provided content. This is a standard empirical robotics paper whose validity hinges on experimental fairness, not definitional circularity.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ellipsoid-based scan registration method that adapts the error metric used for each point match to account for the local surface geometry
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
range-based filtering method that adaptively varies the downsampling resolution ... based on the LiDAR field-of-view and resolution
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Direct LiDAR-Inertial Odometry: Lightweight LIO with Continuous-Time Motion Correction,
K. Chen, R. Nemiroff, and B. T. Lopez, “Direct LiDAR-Inertial Odometry: Lightweight LIO with Continuous-Time Motion Correction,” in IEEE Inter- national Conference on Robotics and Automation (ICRA) , 2023
work page 2023
-
[2]
FAST-LIO2: Fast Direct LiDAR- inertial Odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “FAST-LIO2: Fast Direct LiDAR- inertial Odometry,” IEEE Transactions on Robotics (TRO) , vol. 38, 2021
work page 2021
-
[3]
iG-LIO: An Incremental GICP-Based Tightly-Coupled LiDAR-Inertial Odometry,
Z. Chen, Y . Xu, S. Yuan, and L. Xie, “iG-LIO: An Incremental GICP-Based Tightly-Coupled LiDAR-Inertial Odometry,” IEEE Robotics and Automation Letters (RAL) , vol. 9, 2024
work page 2024
-
[4]
Y . Tao, M. A. Munoz-Banon, L. Zhang, J. Wang, L. F. T. Fu, and M. Fallon, “The Oxford Spires Dataset: Benchmarking Large-Scale LiDAR Visual Localisation, Reconstruction and Radiance Field Methods,” International Journal of Robotics Research (IJRR) , 2025
work page 2025
-
[5]
BotanicGarden: A High-Quality Dataset for Robot Navigation in Unstructured Natural Environments,
Y . Liu, Y . Fu, M. Qin, Y . Xu, B. Xu, F. Chen, B. Goossens, P. Z. Sun, H. Yu, C. Liu, L. Chen, W. Tao, and H. Zhao, “BotanicGarden: A High-Quality Dataset for Robot Navigation in Unstructured Natural Environments,” IEEE Robotics and Automation Letters (RAL) , vol. 9, 2024
work page 2024
-
[6]
LOAM: Lidar Odometry and Mapping in Real-time,
J. Zhang and S. Singh, “LOAM: Lidar Odometry and Mapping in Real-time,” in Robotics: Science and Systems (RSS) , 2014
work page 2014
-
[7]
LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping,” in IEEE International Conference on Intelligent Robots and Systems (IROS) , 2020
work page 2020
-
[8]
FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter,
W. Xu and F. Zhang, “FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter,” IEEE Robotics and Automation Letters (RAL) , vol. 6, 2020
work page 2020
-
[9]
AdaLIO: Robust Adaptive LiDAR- Inertial Odometry in Degenerate Indoor Environments,
H. Lim, D. Kim, B. Kim, and H. Myung, “AdaLIO: Robust Adaptive LiDAR- Inertial Odometry in Degenerate Indoor Environments,” in International Conference on Ubiquitous Robots , 2023
work page 2023
-
[10]
A. V . Segal, D. Haehnel, and S. Thrun, “Generalized-ICP,” in Robotics: Science and Systems (RSS) , 2009
work page 2009
-
[11]
X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments,
T. Tuna, J. Nubert, Y . Nava, S. Khattak, and M. Hutter, “X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments,” IEEE Transactions on Robotics (TRO) , vol. 40, 2024
work page 2024
-
[12]
Super Odome- try: IMU-centric LiDAR-Visual-Inertial Estimator for Challenging Environ- ments,
S. Zhao, H. Zhang, P. Wang, L. Nogueira, and S. Scherer, “Super Odome- try: IMU-centric LiDAR-Visual-Inertial Estimator for Challenging Environ- ments,” IEEE International Conference on Intelligent Robots and Systems (IROS), pp. 8729–8736, 2021
work page 2021
-
[13]
GenZ-ICP: Generalizable and Degeneracy- Robust LiDAR Odometry Using an Adaptive Weighting,
D. Lee, H. Lim, and S. Han, “GenZ-ICP: Generalizable and Degeneracy- Robust LiDAR Odometry Using an Adaptive Weighting,” IEEE Robotics and Automation Letters (RAL) , vol. 10, 2024
work page 2024
-
[14]
SLICT: Multi- input Multi-scale Surfel-Based Lidar-Inertial Continuous-Time Odometry and Mapping,
T.-M. Nguyen, D. Duberg, P. Jensfelt, S. Yuan, and L. Xie, “SLICT: Multi- input Multi-scale Surfel-Based Lidar-Inertial Continuous-Time Odometry and Mapping,” IEEE Robotics and Automation Letters (RAL) , 2022
work page 2022
-
[15]
Wildcat: Online Continuous-Time 3D Lidar- Inertial SLAM,
M. Ramezani, K. Khosoussi, G. Catt, P. Moghadam, J. Williams, P. Borges, F. Pauling, and N. Kottege, “Wildcat: Online Continuous-Time 3D Lidar- Inertial SLAM,” arXiv, 2022
work page 2022
-
[16]
i-Octree: A Fast, Lightweight, and Dynamic Octree for Proximity Search,
J. Zhu, H. Li, Z. Wang, S. Wang, and T. Zhang, “i-Octree: A Fast, Lightweight, and Dynamic Octree for Proximity Search,” in IEEE Interna- tional Conference on Robotics and Automation (ICRA) , 2024
work page 2024
-
[17]
Geometry Preserving Sampling Method Based on Spectral Decomposition for Large-Scale Environments,
M. Labussiere, J. Laconte, and F. Pomerleau, “Geometry Preserving Sampling Method Based on Spectral Decomposition for Large-Scale Environments,” Frontiers in Robotics and AI , vol. 7, 2020
work page 2020
-
[18]
SuperLoc: The Key to Robust LiDAR-Inertial Localization Lies in Predict- ing Alignment Risks,
S. Zhao, H. Zhu, Y . Gao, B. Kim, Y . Qiu, A. M. Johnson, and S. Scherer, “SuperLoc: The Key to Robust LiDAR-Inertial Localization Lies in Predict- ing Alignment Risks,” in IEEE International Conference on Robotics and Automation (ICRA) , 2025
work page 2025
-
[19]
Tensor V oting: Theory and Applications,
G. Medioni, C.-K. Tang, and M.-S. Lee, “Tensor V oting: Theory and Applications,” in Proceedings of RFIA , 2000
work page 2000
-
[20]
A Closed-Form Solution to Tensor V oting: Theory and Applications,
T.-P. Wu, S.-K. Yeung, J. Jia, C.-K. Tang, and G. Medioni, “A Closed-Form Solution to Tensor V oting: Theory and Applications,” IEEE Transactions on Pattern Analysis and Machine Intelligence , vol. 34, 2011
work page 2011
-
[21]
The Newer College Dataset: Handheld LiDAR, Inertial and Vision with Ground Truth,
M. Ramezani, Y . Wang, M. Camurri, D. Wisth, M. Mattamala, and M. Fallon, “The Newer College Dataset: Handheld LiDAR, Inertial and Vision with Ground Truth,” in IEEE International Conference on Intelligent Robots and Systems (IROS), 2020
work page 2020
-
[22]
Multi-Camera LiDAR Inertial Extension to the Newer College Dataset,
L. Zhang, M. Camurri, D. Wisth, and M. Fallon, “Multi-Camera LiDAR Inertial Extension to the Newer College Dataset,” arXiv, 2021
work page 2021
-
[23]
GRACO: A Multimodal Dataset for Ground and Aerial Cooperative Localization and Mapping,
Y . Zhu, Y . Kong, Y . Jie, S. Xu, and H. Cheng, “GRACO: A Multimodal Dataset for Ground and Aerial Cooperative Localization and Mapping,” IEEE Robotics and Automation Letters (RAL) , vol. 8, 2023
work page 2023
-
[24]
Heterogeneous LiDAR dataset for benchmarking robust localization in diverse degenerate scenarios,
Z. Chen, Y . Qi, D. Feng, X. Zhuang, H. Chen, X. Hu, J. Wu, K. Peng, and P. Lu, “Heterogeneous LiDAR dataset for benchmarking robust localization in diverse degenerate scenarios,” International Journal of Robotics Research (IJRR), 2025
work page 2025
-
[25]
Grupp, evo: Python package for the evaluation of odometry and SLAM ,
M. Grupp, evo: Python package for the evaluation of odometry and SLAM ,
-
[26]
https://github.com/MichaelGrupp/evo
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.