SA-LIVO: Efficient LiDAR-Inertial-Visual Odometry with Subspace-Aware Degeneracy Handling
Pith reviewed 2026-06-25 21:09 UTC · model grok-4.3
The pith
Eigendecomposition of the joint LiDAR-visual information matrix with per-direction soft gates allows selective compensation only in degenerate directions during odometry.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
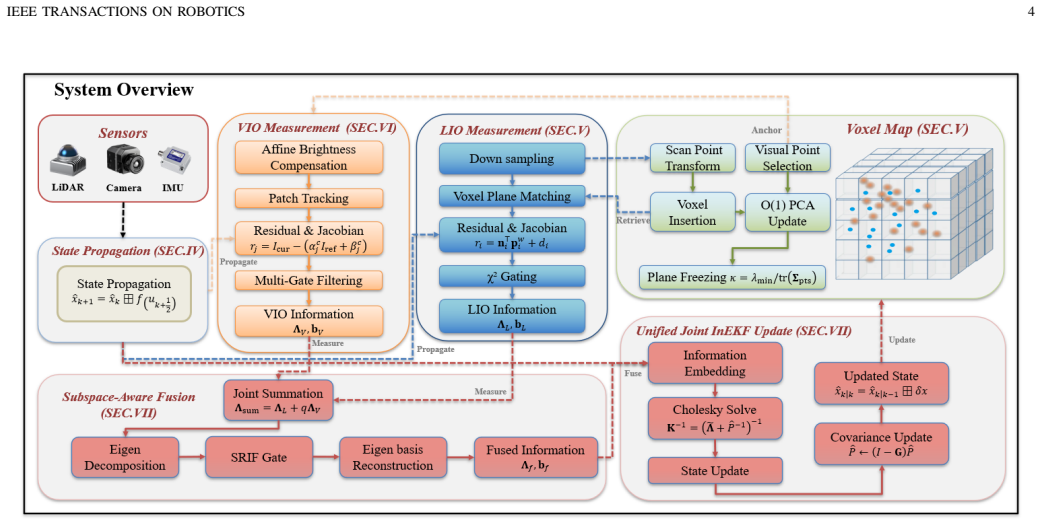
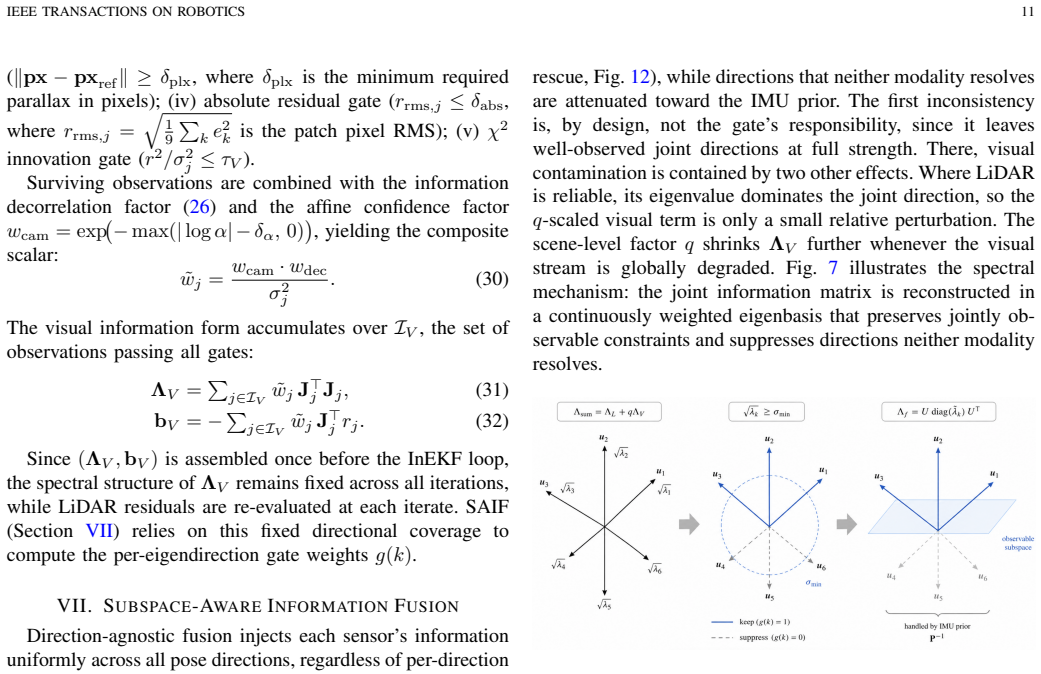
The Subspace-Aware Information Fusion framework eigendecomposes the joint LiDAR-visual information matrix and applies a linear-clamp soft gate per eigendirection, attenuating degenerate directions while preserving observable ones at full strength. LiDAR and visual residuals are then jointly optimized in one InEKF loop at a shared linearization point. Photometric Jacobians are assembled once before the loop and reused across iterations.
What carries the argument
Subspace-Aware Information Fusion (SAIF), which eigendecomposes the joint information matrix and applies a direction-specific linear-clamp soft gate to control how much each sensor contributes to each pose axis.
If this is right
- Accuracy remains competitive with the strongest existing LIVO baselines on the HILTI'22, New College, and Oxford Spires sequences.
- Drift stays bounded in concurrent LiDAR-visual degradation cases where competing systems lose track.
- Joint optimization inside a single InEKF loop with reused Jacobians yields 12.3 ms per frame on a laptop CPU and 26.8 ms on an embedded ARM board.
- Peak memory is 3.6-6.3 times lower than iterated-filter baselines.
Where Pith is reading between the lines
- The same eigendirection gating could be applied to other multi-sensor combinations that face independent failure modes, such as radar-visual fusion.
- Reusing Jacobians across iterations may allow the same accuracy at even lower update rates on power-constrained platforms.
- Explicitly measuring the angle between successive eigendirections across frames could expose when the soft-gate assumption begins to break.
Load-bearing premise
The eigendirections extracted from the joint information matrix cleanly separate the observable and degenerate subspaces without creating misalignment between the linearization point and the actual residuals.
What would settle it
A controlled test sequence in which SA-LIVO produces larger drift or divergence than a binary degeneracy detector once LiDAR scan geometry becomes under-constrained in specific directions while visual features remain available.
Figures

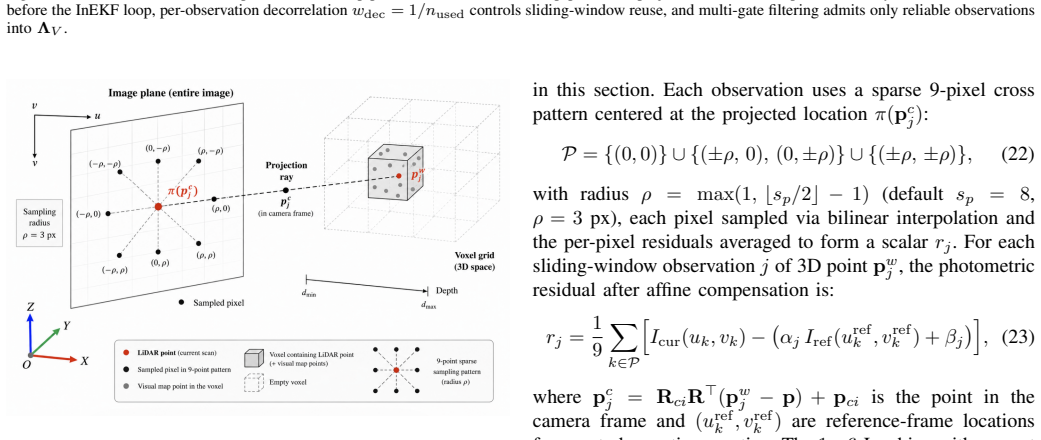



read the original abstract
Tightly coupled LiDAR-visual-inertial odometry (LIVO) fuses precise geometric depth with complementary visual measurements, yet its exteroceptive sensors face independent failure modes: LiDAR degenerates when scan geometry is under-constrained, while visual measurements degrade under adverse illumination or texture absence. Existing countermeasures, including binary degeneracy detection, covariance inflation, and scene-level quality gating, operate at the modality level and leave the direction-dependent structure of the joint information matrix unaddressed. Consequently, visual residuals enter pose directions where LiDAR is well-constrained, while in deficient directions visual compensation disperses across the full state space rather than concentrating where needed. We propose SA-LIVO, a LiDAR-inertial-visual odometry system addressing these limitations through direction-selective fusion and information-efficient processing. The Subspace-Aware Information Fusion (SAIF) framework eigendecomposes the joint LiDAR-visual information matrix and applies a linear-clamp soft gate per eigendirection, attenuating degenerate directions while preserving observable ones at full strength. LiDAR and visual residuals are then jointly optimized in one InEKF loop at a shared linearization point. Since visual information contributes only where LiDAR is deficient, photometric Jacobians are assembled once before the loop and reused across iterations, avoiding the per-iteration cost of conventional iterated filters. Experiments on 29 sequences from three benchmarks (HILTI'22, New College, Oxford Spires) and concurrent-degradation scenarios show accuracy competitive with the strongest baselines and bounded drift where competing systems diverge. SA-LIVO averages 12.3 ms per frame on a laptop CPU and 26.8 ms on an embedded ARM board without GPU, with 3.6-6.3x lower peak memory. The code will be open-sourced.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents SA-LIVO, a tightly-coupled LiDAR-inertial-visual odometry system. It introduces the Subspace-Aware Information Fusion (SAIF) framework that eigendecomposes the joint LiDAR-visual information matrix and applies a linear-clamp soft gate per eigendirection to attenuate degenerate directions while preserving observable ones at full strength. LiDAR and visual residuals are jointly optimized in one InEKF loop at a shared linearization point, with photometric Jacobians precomputed once and reused across iterations. Experiments on 29 sequences from HILTI'22, New College, and Oxford Spires benchmarks, plus concurrent-degradation scenarios, report competitive accuracy, bounded drift where baselines diverge, 12.3 ms/frame on laptop CPU, 26.8 ms on embedded ARM, and 3.6-6.3x lower peak memory. The code will be open-sourced.
Significance. If the SAIF eigendecomposition and soft-gate mechanism correctly isolate and selectively attenuate degenerate subspaces without misalignment, the method provides a principled direction-dependent fusion approach that improves upon modality-level gating in existing LIVO systems. The single-loop InEKF optimization with Jacobian reuse yields clear efficiency gains. The empirical results on multiple benchmarks and hardware platforms, combined with the commitment to open-source the code, indicate practical value for real-time robotics in challenging environments where independent sensor failures occur.
major comments (2)
- [SAIF framework] SAIF framework (joint information matrix eigendecomposition and linear-clamp gate): the central claim that eigendirections at the shared linearization point cleanly separate observable and degenerate subspaces of the combined cost is load-bearing for selective attenuation. The manuscript does not address the risk that residual gradients may deviate from this linearization (due to nonlinearity, iteration drift, or sensor-specific geometry), which could cause the gate to over-damp observable directions or under-attenuate degenerate ones. A concrete analysis or additional validation of this alignment is required.
- [Experiments] Experiments (29 sequences and concurrent-degradation scenarios): while competitive accuracy and bounded drift are reported, the results do not isolate the contribution of the per-eigendirection soft gate from other components such as the shared InEKF linearization point or Jacobian reuse. Without such ablations or controls, it is difficult to attribute the robustness gains specifically to the subspace-aware handling.
minor comments (2)
- [Abstract] Abstract: the runtime and memory claims (12.3 ms/frame, 26.8 ms on ARM, 3.6-6.3x lower peak memory) are presented without explicit comparison to the runtimes or memory of the strongest baselines on the same hardware.
- The description of the linear-clamp soft gate would benefit from an explicit equation or pseudocode to clarify the clamping thresholds and how they interact with the eigendecomposition.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We respond to each major comment below and indicate where revisions will be made to address valid concerns.
read point-by-point responses
-
Referee: [SAIF framework] SAIF framework (joint information matrix eigendecomposition and linear-clamp gate): the central claim that eigendirections at the shared linearization point cleanly separate observable and degenerate subspaces of the combined cost is load-bearing for selective attenuation. The manuscript does not address the risk that residual gradients may deviate from this linearization (due to nonlinearity, iteration drift, or sensor-specific geometry), which could cause the gate to over-damp observable directions or under-attenuate degenerate ones. A concrete analysis or additional validation of this alignment is required.
Authors: We acknowledge that the manuscript does not explicitly analyze potential misalignment between eigendirections at the shared linearization point and residual gradients during optimization due to nonlinearity or iteration effects. The InEKF single-loop design and Jacobian reuse aim to preserve consistency at the common point, with the linear-clamp gate providing a soft mechanism for robustness. However, the referee's point on the need for concrete validation is valid. In the revised version we will add a dedicated subsection with a sensitivity study quantifying eigendirection drift across iterations on representative sequences and its effect on gate values. revision: yes
-
Referee: [Experiments] Experiments (29 sequences and concurrent-degradation scenarios): while competitive accuracy and bounded drift are reported, the results do not isolate the contribution of the per-eigendirection soft gate from other components such as the shared InEKF linearization point or Jacobian reuse. Without such ablations or controls, it is difficult to attribute the robustness gains specifically to the subspace-aware handling.
Authors: The referee correctly identifies that the current experiments do not include ablations that isolate the per-eigendirection soft gate from the shared linearization point and Jacobian reuse. The concurrent-degradation scenarios demonstrate overall system behavior under independent sensor failure, but they do not disentangle the subspace-aware component. We will incorporate additional ablation studies in the revision, comparing the full SAIF system against variants that disable the per-eigendirection gating while retaining the other optimizations, to better attribute the observed robustness gains. revision: yes
Circularity Check
No circularity: SAIF framework is a novel processing step with independent derivation
full rationale
The paper introduces the Subspace-Aware Information Fusion (SAIF) as a new eigendecomposition-based gating mechanism applied to the joint LiDAR-visual information matrix, followed by joint InEKF optimization. No equations or claims in the provided text reduce the claimed performance, degeneracy handling, or efficiency gains to a fitted parameter, self-citation chain, or input by construction. The method is presented as a direct algorithmic contribution without invoking prior author work as a uniqueness theorem or ansatz. Experiments are described as external validation on public benchmarks. This satisfies the default expectation of a self-contained derivation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The joint LiDAR-visual information matrix admits an eigendecomposition whose directions correspond to observable versus degenerate subspaces of the fused state.
Reference graph
Works this paper leans on
-
[1]
FAST-LIVO2: Fast, direct LiDAR-inertial-visual odometry,
C. Zheng, W. Xu, Q. Guo, and F. Zhang, “FAST-LIVO2: Fast, direct LiDAR-inertial-visual odometry,”IEEE Trans. Robot., vol. 40, pp. 1529– 1546, 2024, doi: 10.1109/TRO.2024.3502198
-
[2]
Generalized affordance templates for mobile manipulation,
J. Lin and F. Zhang, “R 3LIVE: A robust, real-time, RGB- colored, LiDAR-inertial-visual tightly-coupled state estimation and mapping package,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Philadelphia, PA, USA, May 2022, pp. 10672–10678, doi: 10.1109/ICRA46639.2022.9812253
-
[3]
LVI-SAM: Tightly-coupled lidar-visual-inertial odometry via smoothing and mapping,
T. Shan, B. Englot, C. Ratti, and D. Rus, “LVI-SAM: Tightly-coupled lidar-visual-inertial odometry via smoothing and mapping,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Xi’an, China, May 2021, pp. 5692–5698
2021
-
[4]
Y . Taoet al., “The Oxford Spires Dataset: Benchmarking large-scale LiDAR-visual localisation, reconstruction and radiance field methods,” Int. J. Robot. Res., 2025, doi: 10.1177/02783649251369905
-
[5]
Hilti-Oxford dataset: A millimetre accurate benchmark for simultaneous localization and mapping,
L. Zhang, M. Helmberger, L. F. T. Fu, D. Wisth, M. Camurri, D. Scaramuzza, and M. Fallon, “Hilti-Oxford dataset: A millimetre accurate benchmark for simultaneous localization and mapping,”IEEE Robot. Autom. Lett., vol. 8, no. 1, pp. 408–415, Jan. 2023, doi: 10.1109/LRA.2022.3226077
-
[6]
The Newer College Dataset: Handheld LiDAR, inertial and vision with ground truth,
M. Ramezani, Y . Wang, M. Camurri, D. Wisth, M. Mattamala, and M. Fallon, “The Newer College Dataset: Handheld LiDAR, inertial and vision with ground truth,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), Las Vegas, NV , USA, Oct. 2020, pp. 4353–4360, doi: 10.1109/IROS45743.2020.9340849
-
[7]
LOAM: Lidar odometry and mapping in real- time,
J. Zhang and S. Singh, “LOAM: Lidar odometry and mapping in real- time,” inProc. Robot.: Sci. Syst. (RSS), Berkeley, CA, USA, Jul. 2014, doi: 10.15607/RSS.2014.X.007
-
[8]
IEEE Transactions on Robotics38(4), 2053–2073 (2022) https: //doi.org/10.1109/TRO.2022.3141876
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “FAST-LIO2: Fast direct LiDAR-inertial odometry,”IEEE Trans. Robot., vol. 38, no. 4, pp. 2053– 2073, Aug. 2022, doi: 10.1109/TRO.2022.3141876
-
[9]
Laser–visual–inertial odometry and mapping with high robustness and low drift,
J. Zhang and S. Singh, “Laser–visual–inertial odometry and mapping with high robustness and low drift,”J. Field Robot., vol. 35, no. 8, pp. 1242–1264, 2018, doi: 10.1002/rob.21809
-
[10]
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
A. Hinduja, B.-J. Ho, and M. Kaess, “Degeneracy-aware factors with applications to underwater SLAM,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), Macau, China, Nov. 2019, pp. 1293–1299, doi: 10.1109/IROS40897.2019.8968577
-
[11]
X-ICP: Localizability-aware LiDAR registration for robust localization in ex- treme environments,
T. Tuna, J. Nubert, Y . Nava, S. Khattak, and M. Hutter, “X-ICP: Localizability-aware LiDAR registration for robust localization in ex- treme environments,”IEEE Trans. Robot., vol. 40, pp. 452–471, 2024, doi: 10.1109/TRO.2023.3335691
-
[12]
Efficient and prob- abilistic adaptive voxel mapping for accurate online LiDAR odometry,
C. Yuan, W. Xu, X. Liu, X. Hong, and F. Zhang, “Efficient and prob- abilistic adaptive voxel mapping for accurate online LiDAR odometry,” IEEE Robot. Autom. Lett., vol. 7, no. 3, pp. 8518–8525, 2022, doi: 10.1109/LRA.2022.3185439
-
[13]
I. Vizzo, T. Guadagnino, B. Mersch, L. Wiesmann, J. Behley, and C. Stachniss, “KISS-ICP: In defense of point-to-point ICP – sim- ple, accurate, and robust registration if done the right way,”IEEE Robot. Autom. Lett., vol. 8, no. 2, pp. 1029–1036, Feb. 2023, doi: 10.1109/LRA.2023.3236571
-
[14]
A multi-state constraint Kalman filter for vision-aided inertial navigation,
A. I. Mourikis and S. I. Roumeliotis, “A multi-state constraint Kalman filter for vision-aided inertial navigation,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Roma, Italy, Apr. 2007, pp. 3565–3572, doi: 10.1109/ROBOT.2007.364024
-
[15]
Hierarchical coverage path planning in com- plex 3d environments,
P. Geneva, K. Eckenhoff, W. Lee, Y . Yang, and G. Huang, “OpenVINS: A research platform for visual-inertial estimation,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Paris, France, May 2020, pp. 4666–4672, doi: 10.1109/ICRA40945.2020.9196524
-
[16]
Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback,
M. Bloesch, M. Burri, S. Omari, M. Hutter, and R. Siegwart, “Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback,”Int. J. Robot. Res., vol. 36, no. 10, pp. 1053– 1072, 2017, doi: 10.1177/0278364917728574
-
[17]
Vins-mono: A robust and versatile monocular visual-inertial state estimator
T. Qin, P. Li, and S. Shen, “VINS-Mono: A robust and versatile monocular visual-inertial state estimator,”IEEE Trans. Robot., vol. 34, no. 4, pp. 1004–1020, Aug. 2018, doi: 10.1109/TRO.2018.2853729
-
[18]
doi:10.1109/TRO.2021.3075643 , file =
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. M. Montiel, and J. D. Tard´os, “ORB-SLAM3: An accurate open-source library for visual, visual-inertial, and multimap SLAM,”IEEE Trans. Robot., vol. 37, no. 6, pp. 1874–1890, Dec. 2021, doi: 10.1109/TRO.2021.3075644
-
[19]
S. Leutenegger, S. Lynen, M. Bosse, R. Siegwart, and P. Furgale, “Keyframe-based visual-inertial odometry using nonlinear optimiza- tion,”Int. J. Robot. Res., vol. 34, no. 3, pp. 314–334, 2015, doi: 10.1177/0278364914554813
-
[20]
On- manifold preintegration for real-time visual–inertial odometry,
C. Forster, L. Carlone, F. Dellaert, and D. Scaramuzza, “On- manifold preintegration for real-time visual–inertial odometry,” IEEE Trans. Robot., vol. 33, no. 1, pp. 1–21, Feb. 2017, doi: 10.1109/TRO.2016.2597321
-
[21]
J. Engel, V . Koltun, and D. Cremers, “Direct sparse odometry,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 40, no. 3, pp. 611–625, 2018, doi: 10.1109/TPAMI.2017.2658577
-
[22]
SVO: Fast semi- direct monocular visual odometry,
C. Forster, M. Pizzoli, and D. Scaramuzza, “SVO: Fast semi- direct monocular visual odometry,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Hong Kong, China, May 2014, pp. 15–22, doi: 10.1109/ICRA.2014.6906584
-
[23]
LSD-SLAM: Large-scale direct monocular SLAM,
J. Engel, T. Sch ¨ops, and D. Cremers, “LSD-SLAM: Large-scale direct monocular SLAM,” inProc. Eur. Conf. Comput. Vis. (ECCV), Z ¨urich, Switzerland, Sep. 2014, pp. 834–849, doi: 10.1007/978-3-319-10605- 2 54
-
[24]
Observability- based rules for designing consistent EKF SLAM estimators,
G. P. Huang, A. I. Mourikis, and S. I. Roumeliotis, “Observability- based rules for designing consistent EKF SLAM estimators,” Int. J. Robot. Res., vol. 29, no. 5, pp. 502–528, 2010, doi: 10.1177/0278364909353640
-
[25]
Consistency analysis and improvement of vision-aided inertial navi- gation,
J. A. Hesch, D. G. Kottas, S. L. Bowman, and S. I. Roumeliotis, “Consistency analysis and improvement of vision-aided inertial navi- gation,”IEEE Trans. Robot., vol. 30, no. 1, pp. 158–176, Feb. 2014, doi: 10.1109/TRO.2013.2277549
-
[26]
The invariant extended Kalman filter as a stable observer,
A. Barrau and S. Bonnabel, “The invariant extended Kalman filter as a stable observer,”IEEE Trans. Autom. Control, vol. 62, no. 4, pp. 1797– 1812, Apr. 2017, doi: 10.1109/TAC.2016.2594085
-
[27]
Exploiting symmetries to design EKFs with consistency properties for navigation and SLAM,
M. Brossard, A. Barrau, and S. Bonnabel, “Exploiting symmetries to design EKFs with consistency properties for navigation and SLAM,” IEEE Sensors J., vol. 19, no. 4, pp. 1572–1579, Feb. 2019, doi: 10.1109/JSEN.2018.2882714
-
[28]
R. Hartley, M. Ghaffari, R. M. Eustice, and J. W. Grizzle, “Contact- aided invariant extended Kalman filtering for robot state estima- tion,”Int. J. Robot. Res., vol. 39, no. 4, pp. 402–430, 2020, doi: 10.1177/0278364919894385
-
[29]
P. Shi, Z. Zhu, S. Sun, X. Zhao, and M. Tan, “Invariant ex- tended Kalman filtering for tightly coupled LiDAR-inertial odom- IEEE TRANSACTIONS ON ROBOTICS 20 etry and mapping,”IEEE/ASME Trans. Mechatron., 2023, doi: 10.1109/TMECH.2022.3233363
-
[30]
H. Zhang, R. Xiao, J. Li, C. Yan, and H. Tang, “A high-precision LiDAR- inertial odometry via invariant extended Kalman filtering and efficient surfel mapping,”IEEE Trans. Instrum. Meas., vol. 73, pp. 1–11, 2024, Art no. 8502911, doi: 10.1109/TIM.2024.3382751
-
[31]
LIMO: Lidar-monocular visual odometry,
J. Graeter, A. Wilczynski, and M. Lauer, “LIMO: Lidar-monocular visual odometry,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), Madrid, Spain, Oct. 2018, pp. 7872–7879, doi: 10.1109/IROS.2018.8594394
-
[32]
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
X. Zuo, P. Geneva, W. Lee, Y . Liu, and G. Huang, “LIC-Fusion: LiDAR-inertial-camera odometry,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), Macau, China, Nov. 2019, pp. 5848–5854, doi: 10.1109/IROS40897.2019.8967746
-
[33]
R 2LIVE: A robust, real-time, LiDAR-inertial-visual tightly-coupled state estimator and mapping,
J. Lin, C. Zheng, W. Xu, and F. Zhang, “R 2LIVE: A robust, real-time, LiDAR-inertial-visual tightly-coupled state estimator and mapping,” IEEE Robot. Autom. Lett., vol. 6, no. 4, pp. 7469–7476, Oct. 2021, doi: 10.1109/LRA.2021.3095515
-
[34]
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
C. Zheng, Q. Zhu, W. Xu, X. Liu, Q. Guo, and F. Zhang, “FAST-LIVO: Fast and tightly-coupled sparse-direct LiDAR-inertial-visual odometry,” inProc. IEEE/RSJ Int. Conf. Intell. Robot. Syst. (IROS), Kyoto, Japan, Oct. 2022, pp. 4003–4009, doi: 10.1109/IROS47612.2022.9981107
-
[35]
Hierarchical coverage path planning in com- plex 3d environments,
A. Rosinol, M. Abate, Y . Chang, and L. Carlone, “Kimera: An open- source library for real-time metric-semantic localization and mapping,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), Paris, France, May 2020, pp. 1689–1696, doi: 10.1109/ICRA40945.2020.9196885
-
[36]
VILENS: Visual, inertial, lidar, and leg odometry for all-terrain legged robots,
D. Wisth, M. Camurri, and M. Fallon, “VILENS: Visual, inertial, lidar, and leg odometry for all-terrain legged robots,”IEEE Trans. Robot., vol. 39, no. 1, pp. 309–326, Feb. 2023, doi: 10.1109/TRO.2022.3193788
-
[37]
SR-LIVO: LiDAR-inertial-visual odometry and mapping with sweep reconstruc- tion,
Z. Yuan, J. Deng, R. Ming, F. Lang, and X. Yang, “SR-LIVO: LiDAR-inertial-visual odometry and mapping with sweep reconstruc- tion,”IEEE Robot. Autom. Lett., vol. 9, no. 6, pp. 5110–5117, 2024, doi: 10.1109/LRA.2024.3385654
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.